Ubuntu 的 ROS 操作系统turtlebot3环境搭建
引言
-
本文介绍如何在Ubuntu系统中为TurtleBot3配置ROS环境,包括安装和配置ROS Noetic的步骤,为PC端控制TurtleBot3提供操作指南。
-
安装和配置的过程分为PC设置、系统安装、依赖安装等部分,并在最后进行网络配置,确保PC端能够顺利连接和控制TurtleBot3。
-
通过本文的内容,读者可以了解在PC端配置ROS的详细流程,避免因不支持的系统或未安装的依赖而导致的兼容性问题。

学习目标
-
学习如何在Ubuntu 20.04系统上配置适用于ROS Noetic的环境,完成TurtleBot3所需的ROS依赖包安装。
-
掌握在PC端安装和配置TurtleBot3仿真环境的操作方法,以便于控制和管理TurtleBot3机器人。
-
安装与自己Ubuntu版本对应的ROS版本,本文ROS Noetic Ninjemys 主要支持 Ubuntu 20.04 (Focal Fossa)。安装前请详细参考 Ubuntu版本、ROS版本与Python 版本之间的关系。

学习内容
1 PC 设置
注意:本文内容对应的是远程PC(桌面或笔记本电脑),用于控制TurtleBot3。 请勿将此指令应用到TurtleBot3机器人上。
1.1 兼容性注意事项
- 警告:Jetson Nano 不支持原生的 Ubuntu 20.04。有关详细信息,请参阅 NVIDIA 开发者论坛。
- 说明:本说明已在安装了 Ubuntu 20.04 和 ROS1 Noetic Ninjemys 的 Linux 系统上进行测试。
- 安装前请详细参考 ———>专栏: Linux系统之Ubuntu系统安装 。
- 安装前请详细参考 ———>专栏: Turtlebot3 PC端ROS环境搭建与仿真。
1.2 下载和安装 Ubuntu 系统
1.2.1 下载适用于 PC 的 Ubuntu 20.04 LTS Desktop 64 位镜像。
- 🕐见专栏:Linux系统之Ubuntu系统安装之 1-磁盘建立空闲分区。
- 🕑见专栏:Linux系统之Ubuntu系统安装之 2-Ubuntu/Windows系统启动盘制作。
1.2.2 按照 安装 Ubuntu 的说明在 PC 上安装 Ubuntu 桌面版。
- 见专栏:Linux系统之Ubuntu系统安装之 3-Ubuntu系统详细安装教程。
2 安装 ROS Noetic
2.1 在终端中依次输入以下命令来安装 ROS Noetic
# 更新包索引
sudo apt update# 升级现有包
sudo apt upgrade# 下载ROS Noetic的安装脚本
wget https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros_noetic.sh# 为脚本添加执行权限
chmod 755 ./install_ros_noetic.sh # 执行安装脚本
bash ./install_ros_noetic.sh2.2 专栏参考教程
如果2.1安装步骤失败,请参考下列教程:
专栏:Turtlebot3 PC端ROS环境搭建与仿真之 Ubuntu 的 ROS 操作系统安装与测试。
3 安装依赖的 ROS 包
# 安装TurtleBot3需要的依赖包
sudo apt-get install ros-noetic-joy ros-noetic-teleop-twist-joy \
ros-noetic-teleop-twist-keyboard ros-noetic-laser-proc \
ros-noetic-rgbd-launch ros-noetic-rosserial-arduino \
ros-noetic-rosserial-python ros-noetic-rosserial-client \
ros-noetic-rosserial-msgs ros-noetic-amcl ros-noetic-map-server \
ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro \
ros-noetic-compressed-image-transport ros-noetic-rqt* ros-noetic-rviz \
ros-noetic-gmapping ros-noetic-navigation ros-noetic-interactive-markers4 安装 TurtleBot3 包
4.1 通过Debian包安装TurtleBot3
# 安装Dynamixel SDK和TurtleBot3包
sudo apt install ros-noetic-dynamixel-sdk
sudo apt install ros-noetic-turtlebot3-msgs
sudo apt install ros-noetic-turtlebot34.2 通过源代码构建(推荐)
# 移除现有包
sudo apt remove ros-noetic-dynamixel-sdk
sudo apt remove ros-noetic-turtlebot3-msgs
sudo apt remove ros-noetic-turtlebot3# 创建工作空间并克隆源码
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
git clone -b noetic-devel https://github.com/ROBOTIS-GIT/DynamixelSDK.git
git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git# 编译工作空间
cd ~/catkin_ws && catkin_make# 添加工作空间环境到.bashrc
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc5 网络配置
5.1 查找分配的IP地址
连接PC到WiFi设备,并使用以下命令查找分配的IP地址:
# 获取IP地址
ifconfig参考图例如下图所示:

5.2 更新ROS的IP设置
打开.bashrc文件,并根据上面获取的IP地址更新ROS的IP设置。
# 打开.bashrc文件
gedit ~/.bashrc# 将localhost地址替换为获取的IP地址
# 在文件末尾添加以下内容
export ROS_MASTER_URI=http://<Your_PC_IP>:11311
export ROS_HOSTNAME=<Your_PC_IP>参考图例如下图所示:

5.3 更新.bashrc配置
# 重新加载.bashrc
source ~/.bashrc小结
- 本文介绍了如何在Ubuntu上为TurtleBot3配置ROS Noetic环境,涵盖了系统安装、依赖包配置以及网络设置的详细步骤。
- 通过这些步骤,读者可以为PC端搭建稳定的TurtleBot3控制环境,并为后续的机器人开发工作奠定基础。
- 最后通过验证安装确保ROS配置成功,为后续的机器人控制和算法开发奠定基础。
欢迎大家评论留言!!!
友情提示:
- 专栏:Turtlebot3 PC端ROS环境搭建与仿真
- 下一节:Ubuntu 的 ROS2 操作系统turtlebot3环境搭建
相关文章:
Ubuntu 的 ROS 操作系统turtlebot3环境搭建
引言 本文介绍如何在Ubuntu系统中为TurtleBot3配置ROS环境,包括安装和配置ROS Noetic的步骤,为PC端控制TurtleBot3提供操作指南。 安装和配置的过程分为PC设置、系统安装、依赖安装等部分,并在最后进行网络配置,确保PC端能够顺利…...

C++笔记---异常
1. 异常的概念 1.1 异常和错误 异常通常是指在程序运行中动态出现的非正常情况,这些情况往往是可以预见并可以在不停止程序的情况下动态地进行处理的。 错误通常是指那些会导致程序终止的,无法动态处理的非正常情况。例如,越界访问、栈溢出…...

Python 操作数据库:读取 Clickhouse 数据存入csv文件
import pandas as pd from clickhouse_driver import Client import timeit import logging import threading from threading import Lock from queue import Queue from typing import List, Dict, Set from contextlib import contextmanager import os import time# 配置参…...

如何找到系统中bert-base-uncased默认安装位置
问题: 服务器中无法连接huggingface,故需要自己将模型文件上传 ubuntu 可以按照这个链接下载 Bert下载和使用(以bert-base-uncased为例) - 会自愈的哈士奇 - 博客园 里面提供了giehub里面的链接 GitHub - google-research/be…...

在启动 Spring Boot 项目时,报找不到 slf4j 的错误
而且 tomcat 的启动信息不知道为什么输出出来了 问 AI 得到的解决方案: 将 pom.xml 中的如下配置替换成这样,排除这个插件 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring - boot - starter - …...

android-12-source-code--write-file-function
find /app4/lineage19_oneplus6/system/ -name "*.cpp" -type f | while read -r k ; do ( grep -i write $k | grep -i file && echo $k ;) ; done获得android::base::WriteStringToFile, 进一步修改 find /app4/lineage19_oneplus6/system/ -name &qu…...
)
SQL(2)
一.时间盲注 有回显时用Union带出数据,只显示是否时可用布尔盲注得出数据,那如果没有任何输出时? 比如无论查询什么,都显示success,同一个回应,无法直接从服务器注入出任何数据,但是我们可以利…...
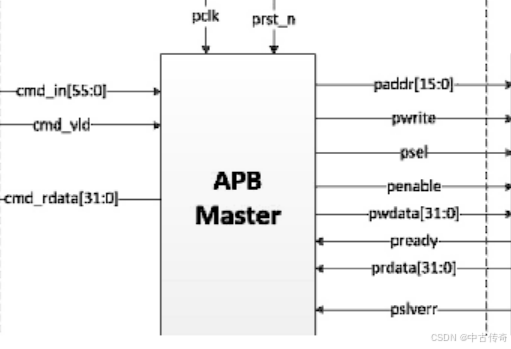
【IC每日一题:AMBA总线--APB协议时序及Verilog实现】
AMBA总线--APB协议时序及Verilog实现 1 APB3协议1.1 APB3时序1.1.1 APB写操作1.1.2 APB读操作 2 代码2.1 apb_master2.2 apb_slave 【博客首发于微信公众号《漫谈芯片与编程》,欢迎专注一下,多谢大家】 AMBA总线是用于连接微控制器和外围设备的总线协议&…...

抢先看!为什么很多公司会强行给员工电脑加屏幕水印?千字长文来解答
2024年度热议:为什么很多公司会强行给员工电脑加屏幕水印? 有人说:概是为了让员工时刻铭记,工作就像这水印,无处不在,想逃也逃不掉! “玩归玩,闹归闹”。 本文将对此进行详尽解答&…...

【AI技术】PaddleSpeech部署方案
【AI技术】PaddleSpeech部署方案 技术介绍优点缺点 部署基础环境的搭建分步详解国内镜像源切换所需环境1 g所需环境2 vim所需环境3 cuda所需环境4 cudnn所需环境5 ssl源码拉取PaddleSpeech环境安装 部署文件分享DockerHub 技术介绍 PaddleSpeech是飞浆平台的一款TTS框架。 优…...

可灵开始“独闯”,全面拥抱AI的快手能否尝到“甜头”?
现任谷歌CEO桑达尔皮查伊曾说到,“人工智能是我们人类正在从事的最为深刻的研究方向之一,甚至要比火与电还更加深刻。” 正如,Sora诞生时,在官方表述中被称为“世界模拟器”,它理解真实的规则,并在此基础上…...

qt QtConcurrent 详解
1、概述 QtConcurrent是Qt框架中用于简化多线程编程的一个模块,它提供了高层次的API来实现并行计算,而不需要开发者直接管理线程的创建、调度和销毁。QtConcurrent主要通过QFuture和QThreadPool来进行并发任务的执行,能够自动利用系统的所有…...
基于构件的软件开发、软件维护、区块链技术及湖仓一体架构的应用
目录 试题一 论基于构件的软件开发方法及其应用 试题二 论软件维护方法及其应用 试题三 论区块链技术及应用 试题四 论湖仓一体架构及其应用 相关推荐 试题一 论基于构件的软件开发方法及其应用 基于构件的软件开发(Component-Based Software Development,CBSD…...

【在Typora中绘制用户旅程图和甘特图】
在 Typora 中可以使用 Mermaid 绘制用户旅程图(User Journey Map),但由于 Mermaid 并不直接支持用户旅程图,我们可以通过一些图表的变通方式(比如流程图或甘特图)来表示用户旅程图的结构。用户旅程图通常展…...

【Vue3】知识汇总,附详细定义和源码详解,后续出微信小程序项目(2)
快速跳转: 我的个人博客主页👉:Reuuse博客 新开专栏👉:Vue3专栏 参考文献👉:uniapp官网 ❀ 感谢支持!☀ 前情提要 🔺因为最近学习的vue语言,发现有很多细节…...

uniapp中使用全局样式文件引入的三种方式
如果你想在 uni-app 中全局引入 SCSS 文件(例如 global.scss),可以通过以下步骤进行配置: 方法一:在 main.js 中引入 在 main.js 中引入全局样式: 你可以在 src/main.js 文件中直接引入 SCSS 文件ÿ…...

计算机网络易混淆知识点串记
文章目录 计算机网络易混淆知识点串记各层PDU首部: 计算机网络易混淆知识点串记 各层PDU首部: PUD首部长度 (B:字节)首部单位数据链路–帧帧首:14B帧尾部:4B——IPV420~60字节4B [通过4位二进制表示]IPV6固定首部40字节[可拓展]4BTCP20~60字节4BUDP8B字节...

Java代码审计-模板注入漏洞
一、模板引擎 在Java开发当中,为了将前端和后端进行分离,降低项目代码的耦合性,使代码更加易于维护和管理。除去以上的原因,模板引擎还能实现动态和静态数据的分离。 二、主流模板引擎 在Java中,主流的模板引擎有:Fre…...

如何在Linux中使用Cron定时执行SQL任务
文章目录 前言一、方案分析二、使用步骤1.准备脚本2.crontab脚本执行 踩坑 前言 演示数据需要每天更新监控数据,不想手动执行,想到以下解决方案 navicat 创建定时任务java服务定时执行linux crontab 定时执行sql脚本 一、方案分析 我选择了第三个方案…...

数据集划分
1、 sklearn玩具数据集介绍 数据量小,数据在sklearn库的本地,只要安装了sklearn,不用上网就可以获取 2 sklearn现实世界数据集介绍 数据量大,数据只能通过网络获取(科学上网) 3 sklearn加载玩具数据集 示…...

2027 报考浙大 MBA 不得不知道的细节规律~
五月下旬了,相信现在还有不少在职考生对报考选择仍然犹豫不决,出现这种情况原因无怪乎两种:一个是考生本身还没有彻底理清自己的报考想法,不确定自己究竟要不要攻读 MBA;另外一种是考生已经下定决心一定要考 MBA&#…...

初识递归算法
目录介绍例PythonC原理优缺点分析题目结尾本文由Jzwalliser原创,发布在CSDN平台上,遵循CC 4.0 BY-SA协议。 因此,若需转载/引用本文,请注明作者并附原文链接,且禁止删除/修改本段文字。 违者必究,谢谢配合。…...

SSH Host key verification failed 原因与安全处理指南
1. 这个报错不是故障,而是SSH在认真履职“Host key verification failed”——第一次看到这个提示时,我正远程部署一个客户服务器,敲完ssh user192.168.3.45回车,终端突然卡住两秒,然后跳出这行红字,后面还…...

评测全网10款主流降AI率工具:帮你锁定真正好用靠谱的一款
随着AI写作工具的普及,论文撰写和内容创作变得越来越高效,许多学生和职场人士都从中受益。然而,随着高校和学术机构对AIGC(人工智能生成内容)检测技术的不断升级,问题也逐渐显现。越来越多的学生发现&#…...

【DeepSeek边缘部署实战指南】:20年架构师亲授5大避坑法则与3步极简上线法
更多请点击: https://codechina.net 第一章:DeepSeek边缘部署的演进逻辑与核心挑战 随着大模型从云端向终端下沉,DeepSeek系列模型在边缘侧的部署正经历从“能跑”到“稳跑”、从“单点适配”到“全栈协同”的范式跃迁。这一演进并非单纯的技…...

键盘定制指南:从硬件到软件,开启实用又有趣的键盘使用体验!
引言 我钟情于键盘,因其是高效的人机交互接口,且充满“趣味”。用力敲击大按键,无需思索;体验精确组合的键盘快捷键带来的掌控感,皆是乐事。看着屏幕内容随操作而变,特别是那些契合自身工作方式的反馈&…...

量子机器学习在网络安全领域的算法演进与实践挑战
1. 量子机器学习:当算力革命遇见智能算法如果你关注过近几年的科技新闻,一定对“量子计算”这个词不陌生。它常常与“颠覆”、“革命”这样的词汇一同出现,听起来既神秘又遥远。但作为一名长期混迹在网络安全和算法优化一线的从业者ÿ…...

开源AI工具真能替代商业方案?2024最新Benchmark数据揭示92%团队忽略的关键短板
更多请点击: https://codechina.net 第一章:开源AI工具真能替代商业方案?2024最新Benchmark数据揭示92%团队忽略的关键短板 2024年Q2由MLPerf与OpenLLM-Bench联合发布的跨模态AI工具基准报告覆盖全球147个生产级AI部署团队,结果显…...

2026年一键生成论文工具实测精选:5款神器从构思到提交全流程护航
写论文的焦虑,是每个科研人和学生都无法回避的日常。选题无从下手,文献检索耗时费力,格式排版反复调整,查重降重更是让人抓耳挠腮。到了2026年,AI工具早已不再只是“敲字机器”,而是进化成了能陪你从构思到…...

MongoDB8.0新特性实战:向量搜索、时序集合与分片集群优化
MongoDB 8.0新特性实战:向量搜索、时序集合与分片集群优化 作者:Crown_22 | AI Agent & Hermes Agent 桌面程序开发者 前言 MongoDB 8.0 是一个重大版本更新,带来了多项面向 AI 和大数据场景的新特性。其中最引人注目的是原生向量搜索(Vector Search)——这让 MongoD…...