AVL树解析
目录
一. AVL的概念
二 AVL树的插入
2.1先按二叉搜索树的规则插入
2.2 AVL的重点:平衡因子更新
3.1 更新后parent的平衡因子等于0。
3.2 更新后parent的平衡因子等于1 或 -1,需要继续往上更新。
3.3 更新后parent的平衡因子等于2 或 -2,需要使用旋转处理。
三.旋转 和 平衡因子等于2 或 -2 的处理
1.右单旋(把左孩子变成爸爸)
2.左单旋(把右孩子变成爸爸)
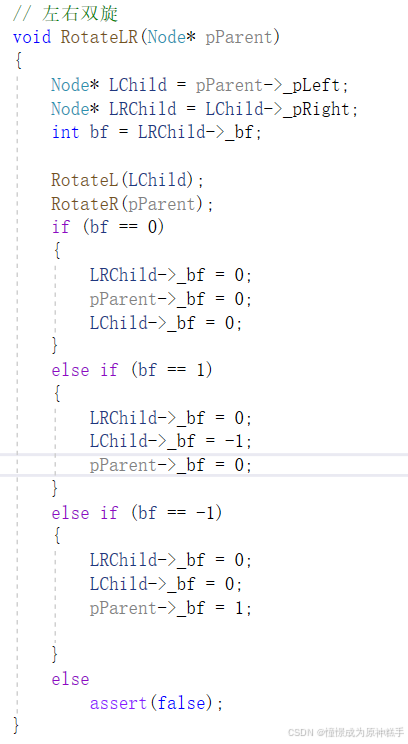
3.左右双旋(把LR_Child 变为爸爸)
4.左右双旋(把RL_Child 变为爸爸)
总代码:
一. AVL的概念
1.AVL树是最先发明的自平衡二叉查找树,AVL是一颗空树,或者具备下列性质的二叉搜索树:它的
左右子树都是AV树,且 左右子树的高度差的绝对值不超过1 。AVL树是一颗高度平衡搜索二叉树,通过控制高度差去控制平衡!!!
2.AVL树实现这里我们引入一个平衡因子(balance factor)的概念,每个结点都有一个平衡因子,任何结点的平衡因子等于右子树的高度减去左子树的高度,也就是说任何结点的平衡因子等于0/1/-1
AVL树并不是必须要平衡因子,但是有了平衡因子可以更方便我们去进行观察和控制树是否平衡
就像一个风向标一样。
二 AVL树的插入
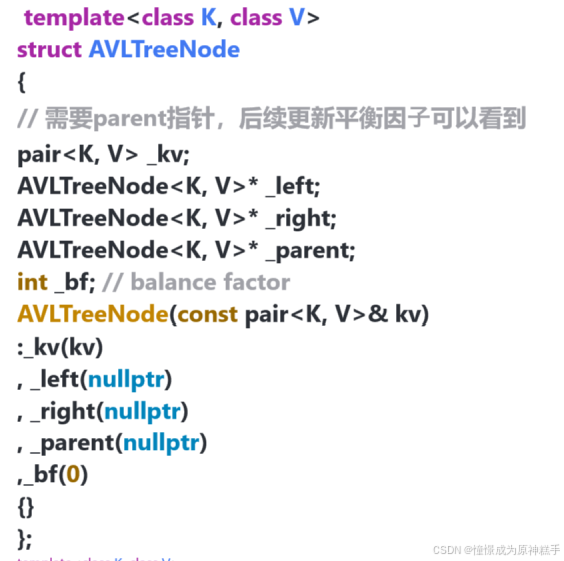
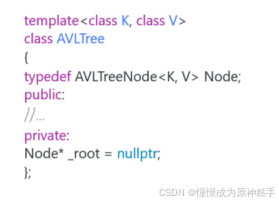
AVL节点 的大概结构 AVL树 的大概结构
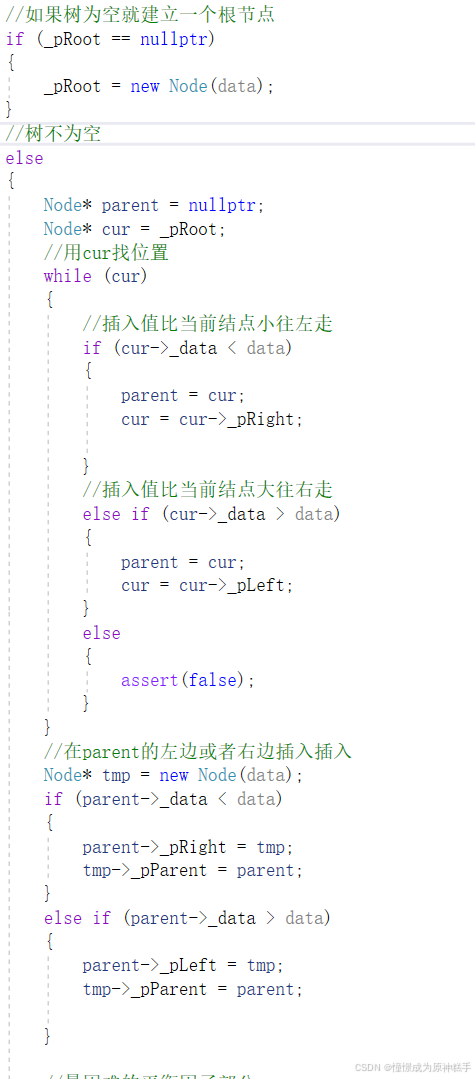
2.1先按二叉搜索树的规则插入
具体可以看这篇
二叉搜索树-CSDN博客
这里是二叉搜索树的,简单的代码总结
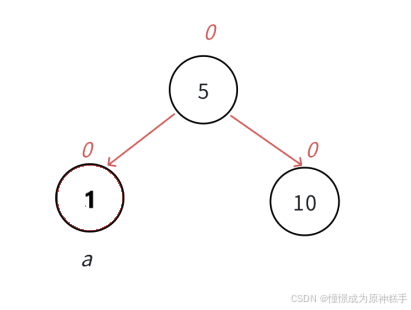
2.2 AVL的重点:平衡因子更新
因为:左右子树的高度差的绝对值不超过1 。
这里我们可以规定
1. 平衡因子 = 右子树高度 - 左子树高度 。
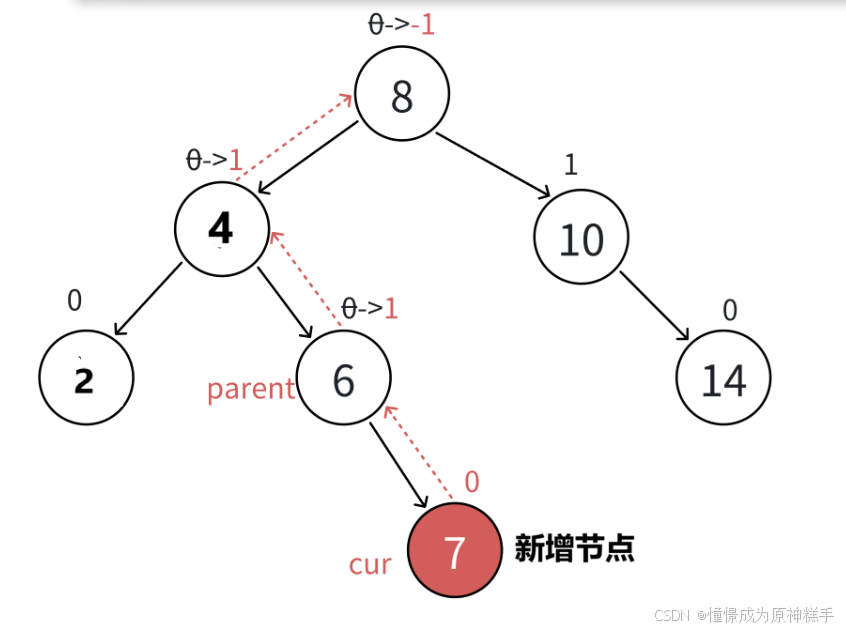
2. 插入结点时,会增加高度,如果新增结点 在parent的右子树,parent的平衡因子++,新增结点在parent的左子树,parent平衡因子--,parent的平衡因子初始化为 0.
3. parent的停止更新条件分为3种:
3.1 更新后parent的平衡因子等于0。
3.2 更新后parent的平衡因子等于1 或 -1,需要继续往上更新。
上面的总代码:
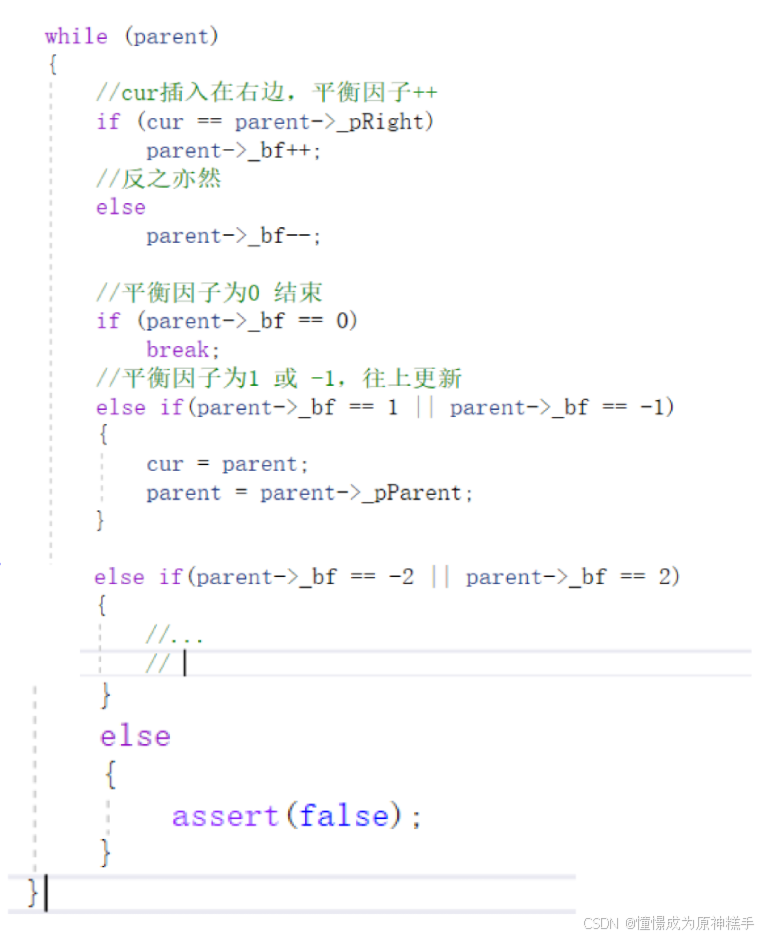
3.3 更新后parent的平衡因子等于2 或 -2,需要使用旋转处理。
下面为具体的分析:
三.旋转 和 平衡因子等于2 或 -2 的处理
旋转总共分为四种,左单旋/右单旋/左右双旋/右左双旋。
这里我们规定:
1. 在parent的左边 插入孩子,parent的平衡因子 - 1
2 .在parent的右边 插入孩子,parent的平衡因子 + 1
1.右单旋(把左孩子变成爸爸)
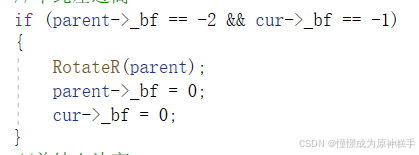
需要 单纯的左边高!!! 才可以使用
比如 if(parent->_bf == -2 && SubR->_bf == -1)
如图:
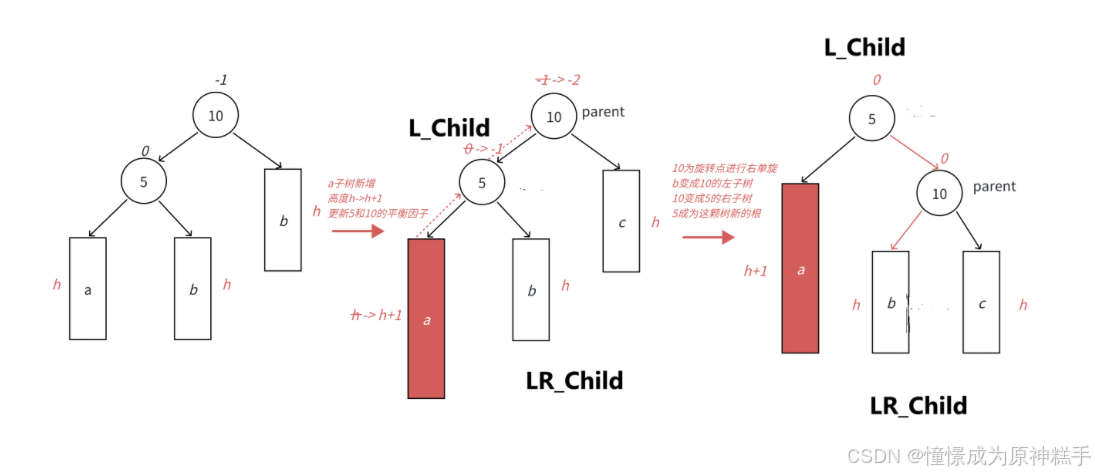
分析:
因为 左右子树的高度差的绝对值不超过1
我们需要把 a 往上提,把parent往下压 ,让SubL变成爸爸 才可以解决。
总的来说就是,左边高就把左边提上来,把右边压下去。
在这种情况下 他们的平衡因子就会为0.
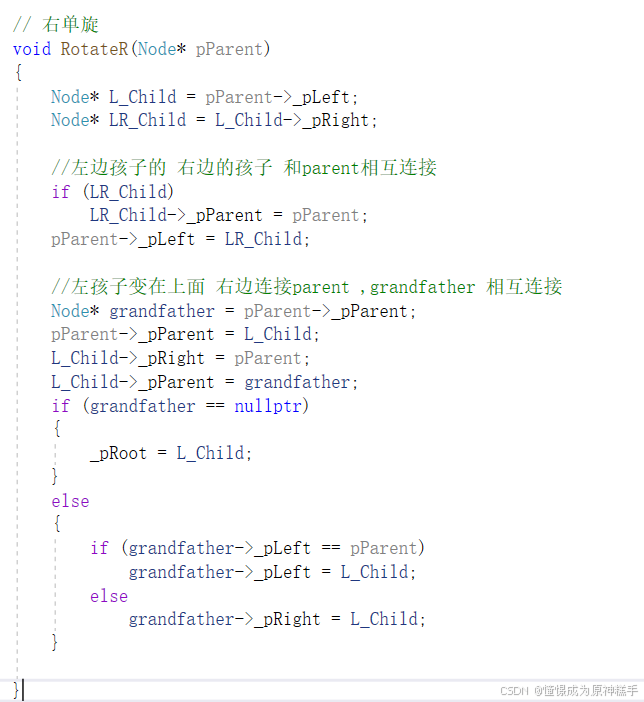
代码为:
RotateR:
2.左单旋(把右孩子变成爸爸)
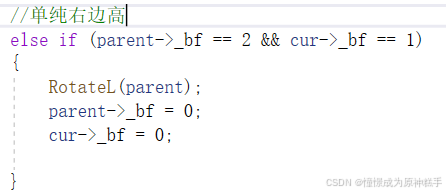
需要 单纯的右边高!!! 才可以使用
比如 if(parent->_bf == 2 && SubR->_bf == 1)
如图:
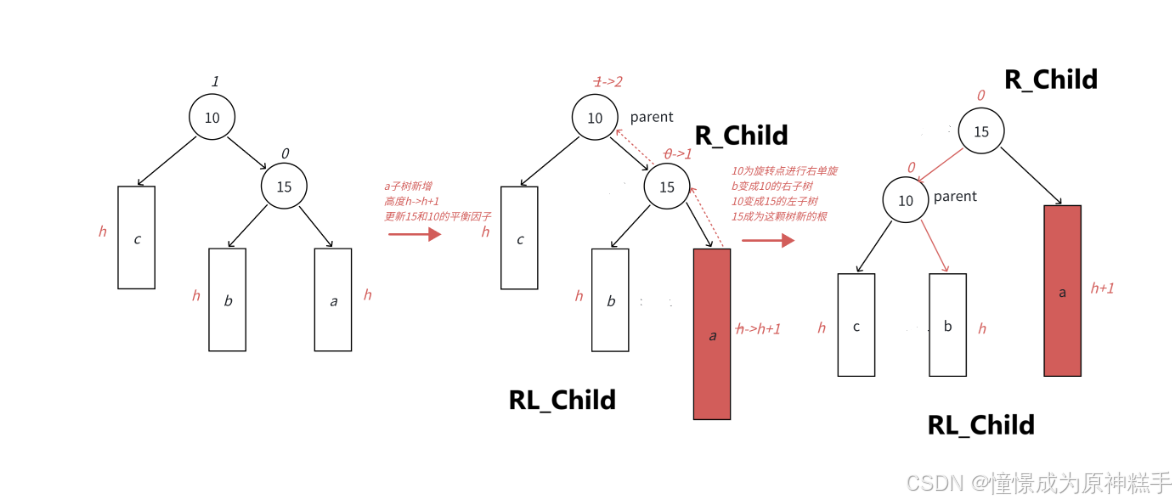
分析:
因为 左右子树的高度差的绝对值不超过1
我们需要把 a 往上提,把parent往下压 ,让SubR变成爸爸 才可以解决。
总的来说就是,右边高就把右边提上来,把左边压下去。
在这种情况下 他们的平衡因子就会为0.
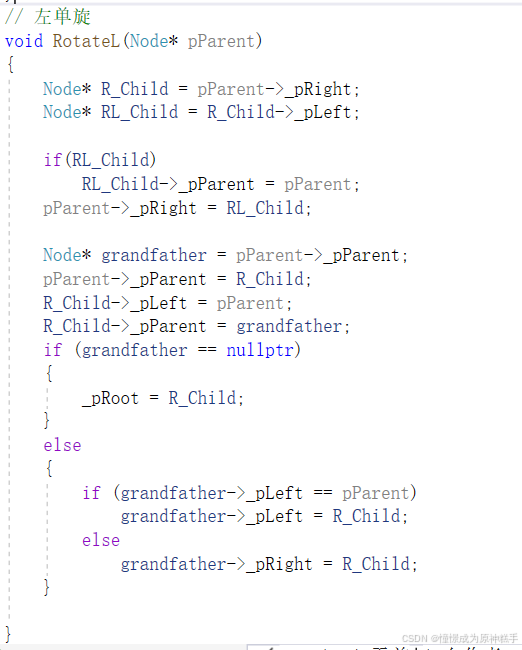
代码为:
RotateL:
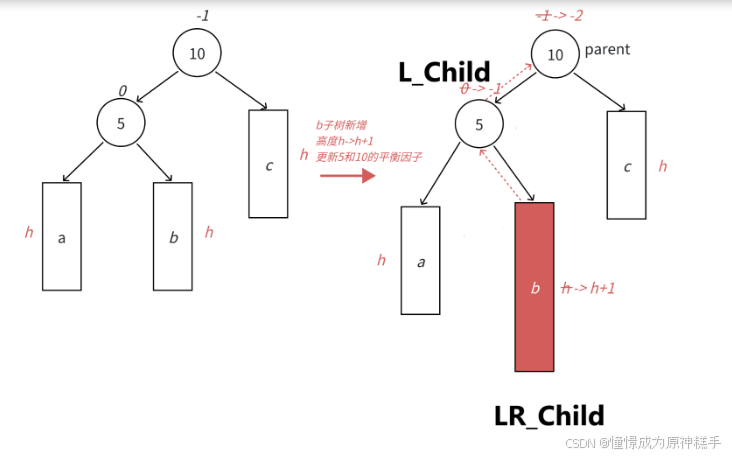
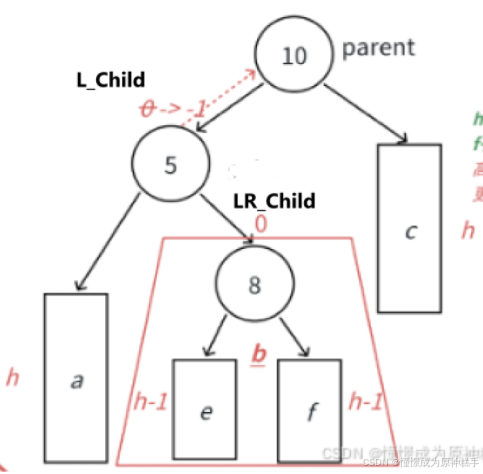
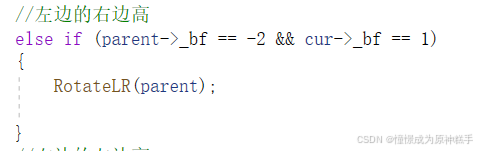
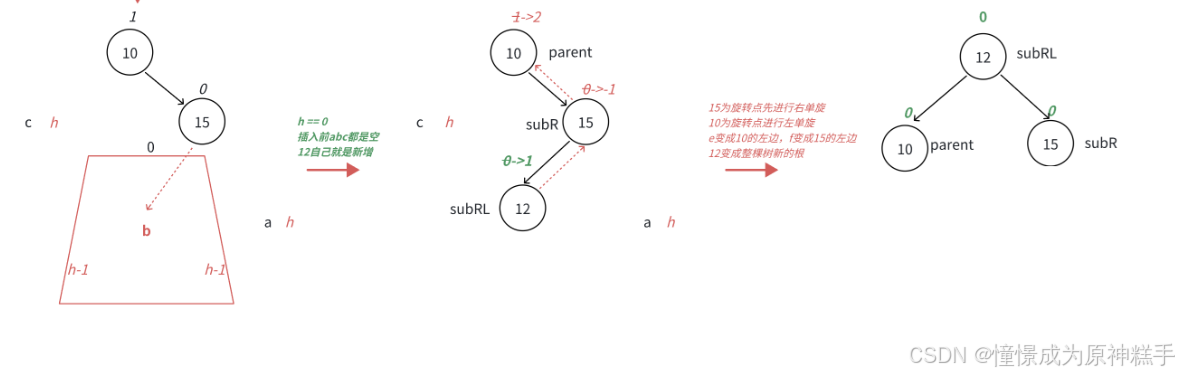
3.左右双旋(把LR_Child 变为爸爸)
需要 左边的右边高!!! 才可以使用
如图所示:
当没插入节点时:
在LR_Child 的左边插入节点:
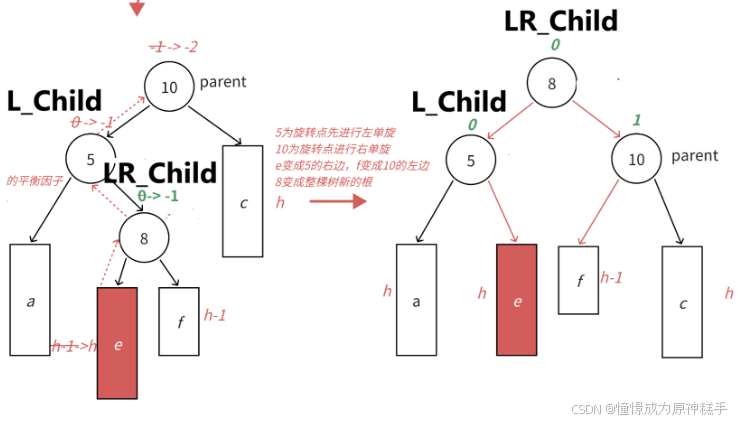
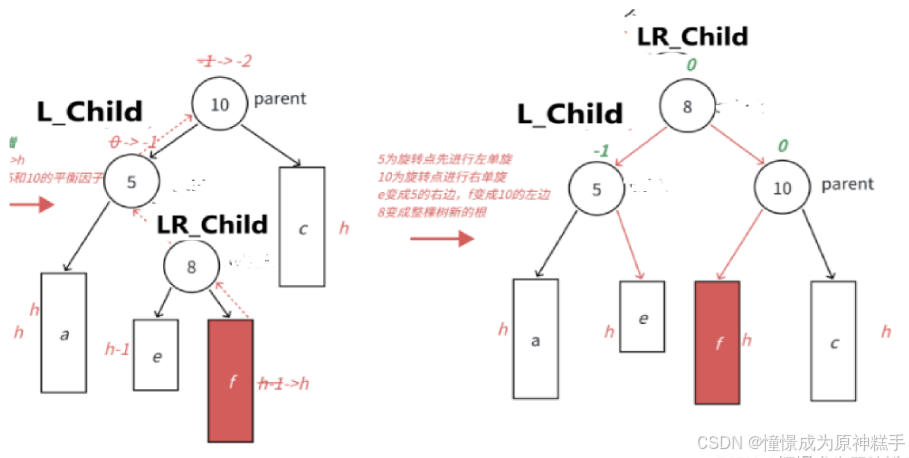
具体过程
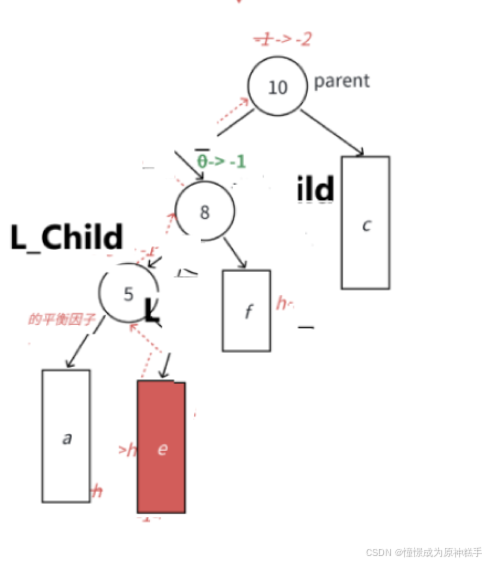
1. 让节点5 左旋转:
2.让节点8 右旋转
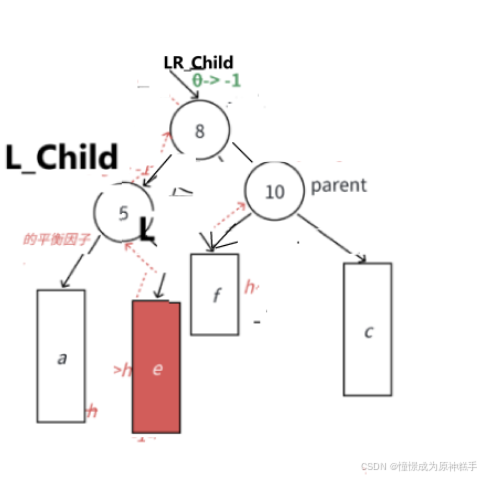
平衡因子:
在LR_Child 为空时
平衡因子 都为0.
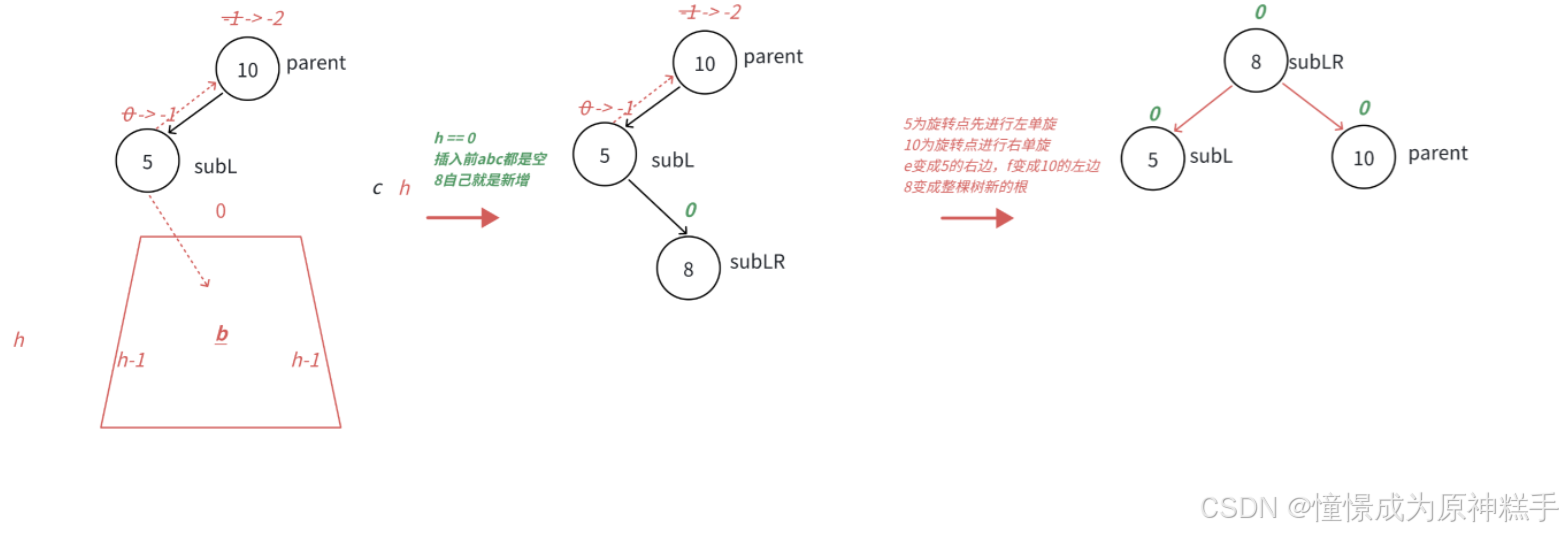
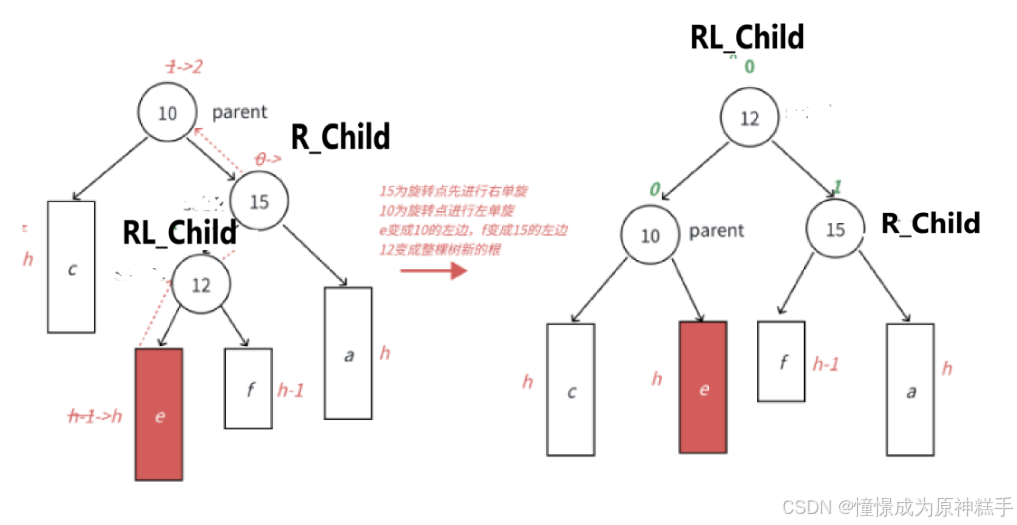
在LR_Child 的左边插入节点:
LR_Child 平衡因子 为 0
L_Child 平衡因子 为 0
parent 平衡因子为 1
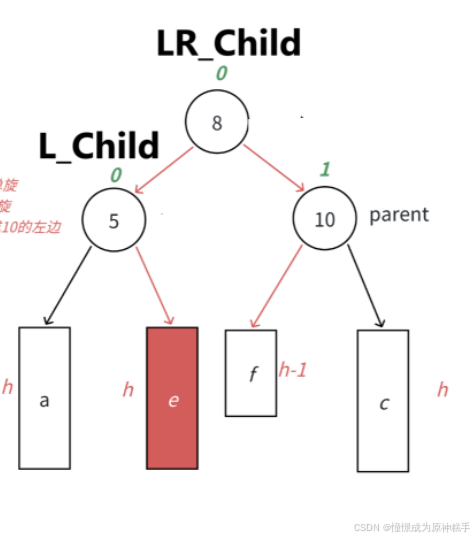
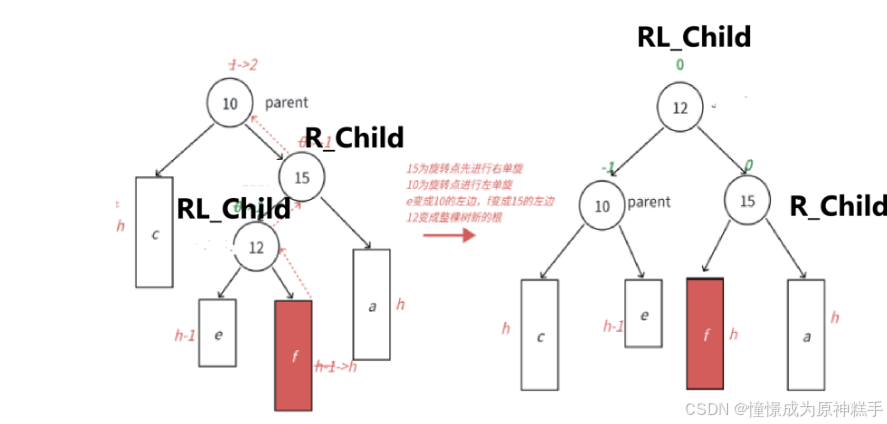
在LR_Child 的右边插入节点:
LR_Child 平衡因子 为 0
L_Child 平衡因子 为 -1
parent 平衡因子为 0
代码:
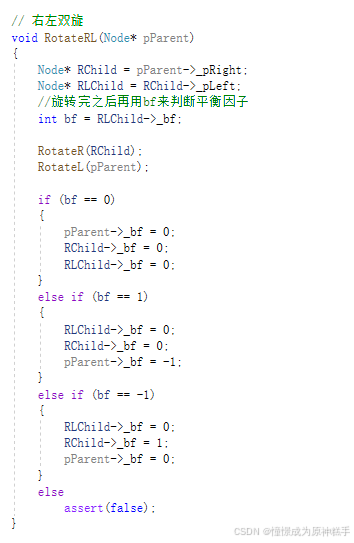
4.左右双旋(把RL_Child 变为爸爸)
太长了,随便写点了,脑子坏了!!!

在LR_Child 为空时
平衡因子 都为0.
在LR_Child 的右边插入节点:
RL_Child 平衡因子 为 0
R_Child 平衡因子 为 0
parent 平衡因子为 -1
在RL_Child 的左边插入节点:
RL_Child 平衡因子 为 0
R_Child 平衡因子 为 1
parent 平衡因子为 0
代码:
总代码:
#pragma once
#include<iostream>
#include<assert.h>
using namespace std;
template<class T>struct AVLTreeNode
{AVLTreeNode(const T& data = T()): _pLeft(nullptr), _pRight(nullptr), _pParent(nullptr), _data(data), _bf(0){}AVLTreeNode<T>* _pLeft;AVLTreeNode<T>* _pRight;AVLTreeNode<T>* _pParent;T _data;int _bf; // 节点的平衡因子
};// AVL: 二叉搜索树 + 平衡因子的限制
template<class T>
class AVLTree
{typedef AVLTreeNode<T> Node;
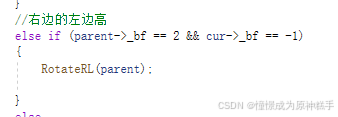
public:AVLTree(): _pRoot(nullptr){}// 在AVL树中插入值为data的节点bool Insert(const T& data){//如果树为空就建立一个根节点if (_pRoot == nullptr){_pRoot = new Node(data);}//树不为空else{Node* parent = nullptr;Node* tmp = _pRoot;//用cur找位置 while (tmp){//插入值比当前结点小往左走if (tmp->_data < data){parent = tmp;tmp = tmp->_pRight;}//插入值比当前结点大往右走else if (tmp->_data > data){parent = tmp;tmp = tmp->_pLeft;}else{assert(false);}}//在parent的左边或者右边插入插入Node* cur = new Node(data);if (parent->_data < data){parent->_pRight = cur;cur->_pParent = parent;}else if (parent->_data > data){parent->_pLeft = cur;cur->_pParent = parent;}//最困难的平衡因子部分while (parent){//cur插入在右边,平衡因子++if (cur == parent->_pRight)parent->_bf++;//反之亦然elseparent->_bf--;//平衡因子为0 结束if (parent->_bf == 0)break;//平衡因子为1 或 -1,往上更新else if(parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_pParent;}else if(parent->_bf == -2 || parent->_bf == 2){//...// //单纯左边高if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);parent->_bf = 0;cur->_bf = 0;}//单纯右边高else if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);parent->_bf = 0;cur->_bf = 0;}//左边的右边高else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}//右边的左边高else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else{assert(false);}break;}else{assert(false);}}}return true;}// AVL树的验证bool IsAVLTree(){return _Height(_pRoot);}void InOrder(){return _InOrder(_pRoot);}size_t Height(){return _Height(_pRoot);}
private:// 根据AVL树的概念验证pRoot是否为有效的AVL树bool _IsAVLTree(Node* pRoot){if (pRoot == nullptr)return true;int left = _Height(pRoot->_pLeft);int right = _Height(pRoot->_pRight);int differ = right - left;if (differ >= 2 || differ <= -2)return false;if (differ != pRoot->_bf)return false;return _IsAVLTree(pRoot->_pLeft) && _IsAVLTree(pRoot->_pRight);}void _InOrder(Node* cur){if (cur == nullptr)return;_InOrder(cur->_pLeft);cout << cur->_data << " ";_InOrder(cur->_pRight);}size_t _Height(Node* pRoot){if (pRoot == nullptr)return 0;size_t left = _Height(pRoot->_pLeft);size_t right = _Height(pRoot->_pRight);return right > left ? right + 1 : left + 1;}// 右单旋void RotateR(Node* pParent){Node* L_Child = pParent->_pLeft;Node* LR_Child = L_Child->_pRight;//左边孩子的 右边的孩子 和parent相互连接if (LR_Child)LR_Child->_pParent = pParent;pParent->_pLeft = LR_Child;//左孩子变在上面 右边连接parent ,grandfather 相互连接Node* grandfather = pParent->_pParent;pParent->_pParent = L_Child;L_Child->_pRight = pParent;L_Child->_pParent = grandfather;if (grandfather == nullptr){_pRoot = L_Child;}else{if (grandfather->_pLeft == pParent)grandfather->_pLeft = L_Child;elsegrandfather->_pRight = L_Child;}}// 左单旋void RotateL(Node* pParent){Node* R_Child = pParent->_pRight;Node* RL_Child = R_Child->_pLeft;//if(RL_Child)RL_Child->_pParent = pParent;pParent->_pRight = RL_Child;Node* grandfather = pParent->_pParent;pParent->_pParent = R_Child;R_Child->_pLeft = pParent;R_Child->_pParent = grandfather;if (grandfather == nullptr){_pRoot = R_Child;}else{if (grandfather->_pLeft == pParent)grandfather->_pLeft = R_Child;elsegrandfather->_pRight = R_Child;}}// 右左双旋void RotateRL(Node* pParent){Node* RChild = pParent->_pRight;Node* RLChild = RChild->_pLeft;//旋转完之后再用bf来判断平衡因子int bf = RLChild->_bf;RotateR(RChild);RotateL(pParent);if (bf == 0){pParent->_bf = 0;RChild->_bf = 0;RLChild->_bf = 0;}else if (bf == 1){RLChild->_bf = 0;RChild->_bf = 0;pParent->_bf = -1;}else if (bf == -1){RLChild->_bf = 0;RChild->_bf = 1;pParent->_bf = 0;}elseassert(false);}// 左右双旋void RotateLR(Node* pParent){Node* LChild = pParent->_pLeft;Node* LRChild = LChild->_pRight;int bf = LRChild->_bf;RotateL(LChild);RotateR(pParent);if (bf == 0){LRChild->_bf = 0;pParent->_bf = 0;LChild->_bf = 0;}else if (bf == 1){LRChild->_bf = 0;LChild->_bf = -1;pParent->_bf = 0;}else if (bf == -1){LRChild->_bf = 0;LChild->_bf = 0;pParent->_bf = 1;}elseassert(false);}private:Node* _pRoot;};相关文章:
AVL树解析
目录 一. AVL的概念 二 AVL树的插入 2.1先按二叉搜索树的规则插入 2.2 AVL的重点:平衡因子更新 3.1 更新后parent的平衡因子等于0。 3.2 更新后parent的平衡因子等于1 或 -1,需要继续往上更新。 3.3 更新后parent的平衡因子等于2 或 -2,需…...
栈和队列(Java)
一.栈(Stack) 1.定义 栈是限定仅在表尾进行插入或删除操作的线性表 一般的表尾称为栈顶 表头称为栈底 栈具有“后进先出”的特点 2.对栈的模拟 栈主要具有以下功能: push(Object item):将元素item压入栈顶。 pop()&am…...

C#设计原则
文章目录 项目地址一、开放封闭原则1.1 不好的版本1.2 将BankProcess的实现改为接口1.3 修改BankStuff类和IBankClient类二、依赖倒置原则2.1 高层不应该依赖于低层模块2.1.1 不好的例子2.1.2 修改:将各个国家的歌曲抽象2.2 抽象不应该依于细节2.2.1 不同的人开不同的车(接口…...

easyfs 简易文件系统
easyfs easyfs 简易文件系统文件系统虚拟文件系统 VFS简易文件系统 easyfs磁盘布局超级块 easyfs 文件系统结构磁盘上的索引结构索引节点Inode 和 DiskInode 之间的关系举例说明读取文件的过程( /hello ) 参考文档 easyfs 简易文件系统 文件系统 常规文…...
)
【架构论文-1】面向服务架构(SOA)
【摘要】 本文以我参加公司的“生产线数字孪生”项目为例,论述了“面向服务架构设计及其应用”。该项目的目标是构建某车企的数字孪生平台,在虚拟场景中能够仿真还原真实产线的动作和节拍,实现虚实联动,从而提前规避问题ÿ…...
刚刚!更新宁德时代社招Verify测评语言理解数字推理SHL题库、网盘资料、高分答案
宁德时代社招入职的Verify测评主要分为两大块:语言理解和数字推理。语言理解部分包括阅读理解、逻辑填空和语句排序,要求在17分钟内完成30题。数字推理部分包括数字序列、数学问题解决和图表分析,同样要求在17分钟内完成18题。这些测评题目旨…...

C++笔记---智能指针
1. 什么是智能指针 1.1 RALL设计思想 RAII(Resource Acquisition Is Initialization,资源获取即初始化)是一种资源管理类的设计思想,广泛应用于C等支持对象导向编程的语言中。它的核心思想是将资源的管理与对象的生命周期紧密绑定…...

CentOS 7系统中更改YUM源为阿里云的镜像源
引言 更换阿里的镜像源可以带来诸多好处,包括提高下载速度、提升稳定性、同步更新、简化配置、节省带宽资源以及增强系统安全性等。因此,对于使用CentOS系统的用户来说,更换阿里的镜像源是一个值得考虑的选择。 1.备份yum源 mv /etc/yum.r…...

Python酷库之旅-第三方库Pandas(206)
目录 一、用法精讲 961、pandas.IntervalIndex.mid属性 961-1、语法 961-2、参数 961-3、功能 961-4、返回值 961-5、说明 961-6、用法 961-6-1、数据准备 961-6-2、代码示例 961-6-3、结果输出 962、pandas.IntervalIndex.length属性 962-1、语法 962-2、参数 …...
3.4CQU数学实验???
meshgrid 是一个用于生成网格点坐标的函数。它常用于在二维或三维空间中创建坐标网格,用于可视化和数据处理。 在二维情况下,meshgrid 函数接受两个一维数组作为输入,并返回两个二维数组,这两个数组中的元素分别表示了所有可能的…...
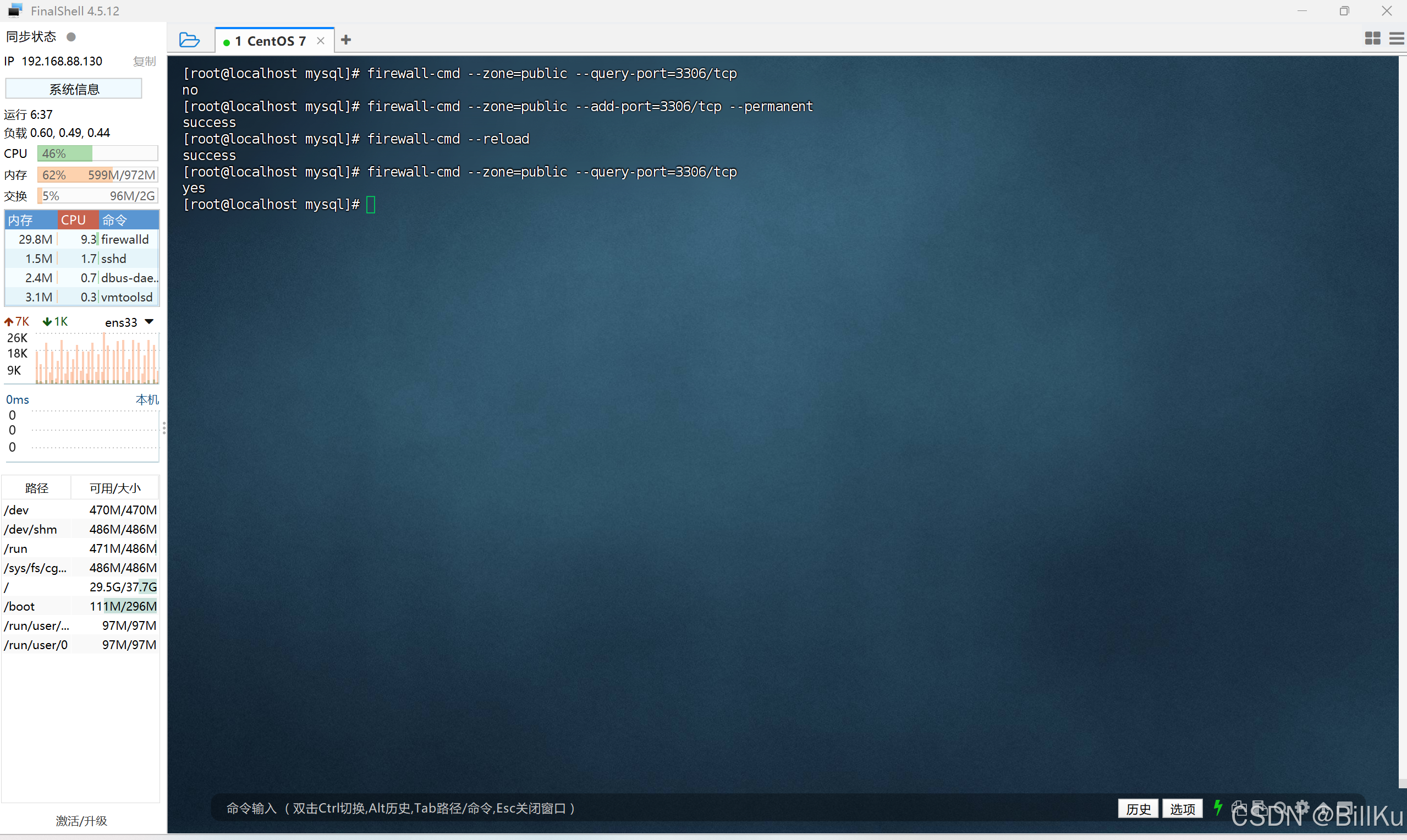
Linux(CentOS)开放端口/关闭端口
一、普通用户使用 sudo 操作,开放/关闭端口,80 1、检查端口是否开放 sudo firewall-cmd --zonepublic --query-port80/tcp 2、开放端口 sudo firewall-cmd --zonepublic --add-port80/tcp --permanent 3、重新加载(开放或关闭端口后都需…...

GreenDao适配AGP8.7+
升级配置 工具版本Android StudioLadybug 2024.2.1 Path2AGP8.7.2KPG1.8.21GGP3.3.1明细 classpath "com.android.tools.build:gradle:$agp_version"classpath "org.jetbrains.kotlin:kotlin-gradle-plugin:$kgp_version"classpath "org.greenrobot:g…...

【前端】Typescript从入门到进阶
以下是 TypeScript 的常用知识点总结,涵盖了从基础到入门的内容,并配有代码示例: 1. TypeScript 基础 1.1 安装和配置 安装 TypeScript 并初始化配置文件: npm install -g typescript tsc --init 1.2 基本类型 TypeScript 提供…...

在 RHEL 8 | CentOS Linux release 8.5.2111上安装 Zabbix 6
1. 备份YUM源文件 cd /etc/yum.repos.d/ mkdir bak mv C* ./bak/ wget -O /etc/yum.repos.d/CentOS-Linux-BaseOS.repo https://mirrors.aliyun.com/repo/Centos-vault-8.5.2111.repo yum clean all yum makecache2. 将 SELinux 设置为宽容模式,如下所示。 sudo s…...

光纤HDMI线怎么连接回音壁?
第一步:准备HDMI线、光纤线(TOSLINK线)、视频源设备、回音壁 第二步:连接HDMI线,找到视频源设备上的HDMI输出口,将HDMI线的一端插入这个接口,再把HDMI线的另一端插入回音壁的HDMI输入口。注意检…...

屏幕后期处理
1、屏幕后期处理效果 屏幕后期处理效果( Screen Post-Processing Effects)是一种在渲染管线的最后阶段应用的视觉效果,允许在场景渲染完成后对最终图像进行各种调整和效果处理,从而增强视觉体验 常见的屏幕后期处理效果有&#x…...

K8资源之endpoint资源EP资源
1 endpoint资源概述 endpoint资源在K8S中用来表s示vc与后端 Pod 之间的连接关系的对象。当创建svc时,svc根据标签是否相同或svc名字是否和ep名字相同,把svc和ip关联上。 删除svc时,会自动的删除同名的ep资源。 2 ep资源和svc的关联测试 […...

微软日志丢失事件敲响安全警钟
NEWS | 事件回顾 最近,全球最大的软件公司之一——微软,遭遇了一场罕见的日志丢失危机。据报告,从9月2日至9月19日,持续长达两周的时间里,微软的多项核心云服务,包括身份验证平台Microsoft Entra、安全信息…...

Qt生成应用程序exe
1. 将工程用MinGW编译器在release模式下编译,生成可执行文件XXX.exe,新建一个文件夹如:F:\Setup\minGW,把exe文件放到这个目录下。 2. 将该编译器的bin文件添加到PATH环境变量里:bin文件路径为:D:\Qt\Qt5.…...

C#中的HttpContent、HttpClientHandle、HttpWebRequest
C#中的HttpContent 在C#中,HttpContent 是 System.Net.Http 命名空间下的一个类,它是 HttpClient 类用来发送和接收HTTP内容的基础。HttpContent 表示HTTP请求或响应的正文内容,并且可以序列化和反序列化数据。 HttpContent 是一个抽象类&a…...

Unity中RVO避障原理与抖动根治实战
1. 为什么NPC一靠近就“抽风”?这不是Bug,是RVO没吃透在Unity里做群体AI时,你肯定见过这种场景:十几个NPC排着队往目标点走,刚走到拐角或窄道,队伍突然像被按了快进键——有的原地打转,有的疯狂…...

Godot 4.2小课堂:用TileMap图层和AStarGrid2D,5分钟搞定一个可交互的2D导航Demo
Godot 4.2极简导航实战:5分钟构建TileMap智能寻路系统在游戏开发中,2D导航系统是构建沉浸式体验的核心组件之一。Godot 4.2引擎提供的TileMap与AStarGrid2D组合,为开发者提供了一套轻量级却功能强大的解决方案。本文将带你快速实现一个可交互…...

June安全防护手册:保护你的论坛免受常见Web攻击的10个技巧
June安全防护手册:保护你的论坛免受常见Web攻击的10个技巧 【免费下载链接】june June is a forum (Deprecated) 项目地址: https://gitcode.com/gh_mirrors/ju/june 在当今数字时代,论坛安全防护已成为每个网站管理员必须面对的重要课题。June作…...

Python SMTP邮件发送教程
Python SMTP邮件发送教程 随着互联网的快速发展,电子邮件已经成为人们日常工作和生活中不可或缺的通讯工具。Python作为一种功能强大的编程语言,同样具备发送电子邮件的能力。本文将详细介绍如何使用Python进行SMTP邮件发送,包括环境配置、代码实现、发送邮件的格式和附件等…...

UE Mobility
UE4传统光照模式最求极致性能:静态光源 静态物体;平衡画质与性能:固定光源 静态物体(经典组合,如太阳);完全动态场景:可移动光源 Lumen;静态光源静态物体:…...

如何用Python脚本实现大麦网90%成功率的自动抢票:终极指南
如何用Python脚本实现大麦网90%成功率的自动抢票:终极指南 【免费下载链接】Automatic_ticket_purchase 大麦网抢票脚本 项目地址: https://gitcode.com/GitHub_Trending/au/Automatic_ticket_purchase 你是否曾经为了抢到心仪演唱会门票而守在电脑前疯狂刷新…...

恒玄bes2600WM+DSP蓝牙耳机项目
bes2600WMDSP蓝牙耳机项目...

融合模糊决策与ECSA优化的软件项目智能风险评估框架
1. 项目概述与核心价值在软件工程这个行当里摸爬滚打十几年,我见过太多项目因为对风险的“视而不见”或“束手无策”而走向失败。项目延期、预算超支、质量滑坡,这些问题的根源往往不是技术本身,而是对潜在威胁的评估和应对失当。传统的风险管…...

LangGraph 与 Streamlit 集成:实时展示多智能体执行状态
1. 标题选项 核心关键词:LangGraph、Streamlit、多智能体、实时可观测性、执行状态可视化 《从0到1:LangGraph + Streamlit 打造可观测的多智能体实时运行面板》 《多智能体开发不再黑盒!手把手教你用Streamlit可视化LangGraph执行全流程》 《LangGraph实战:集成Streamlit实…...

OpenMemories-Tweak:嵌入式系统配置管理的逆向工程实践
OpenMemories-Tweak:嵌入式系统配置管理的逆向工程实践 【免费下载链接】OpenMemories-Tweak Unlock your Sony cameras settings 项目地址: https://gitcode.com/gh_mirrors/op/OpenMemories-Tweak 问题导向:破解封闭式嵌入式系统的配置限制 在…...