HWA高速辅助驾驶系统组成及功能场景
HWA最基本功能包括智能跟车、拨杆变道、压速变道、车道居中保持等功能,有效减轻驾驶疲劳。随着智能驾驶不断走向成熟,HWA升级到高速自动驾驶HWP,可实现智能避让汇入口、智能避让大车、分心/疲劳监测、智能进出匝道、智能判别易混分叉路口、智能变道保护六大功能。
根据ICAP基础行车辅助驾驶测试内容来看,共包括6方面核心能力:
必测项:包括跟车能力、组合控制能力、紧急避险能力和驾驶员交互;
增测项:包括主动换道能力、连续运行能力。
当行车速度低于HWA/HWP作用速度后,自动进入TJA/TJP功能控制。
HWA遵循法律法规
E-NCAP Highway Assist Systems
Traffic Jam Assist,参考
08-《中国智能网联汽车技术规程(C-ICAP)》(2024版)管理规则


HWA系统组成
传感器
单摄像头
智能摄像头,加入了芯片,输出图像信息,车道线
单提像头+单雷达
摄像头输出图像信息
雷达输出点云信息
极坐标
输出雷达处理后的一些信息
输出雷达的一些功能,譬如DOW
单摄像头+单雷达+源光雷达
ADAS控制器
基于感知目标和车辆状态信息输出车辆显示及控制相关信息。
感知信息处理
外部环境和本车运动状态监测
图像到目标
点云到目标
感知与预测
目标融合
车道线融合
地图导航与定位
车道
道路
未来目标及EGO车辆状态预测
行为规划
路径生成与决策
控制
纵向控制
横向控制
报警显示
BSW
AutoSAR架构,AP:SOA;CP
刷写:Boot OTA
通信
诊断
诊断服务
DTC内外部诊断
网络管理
电源管理PMM
信息安全
时间同步
XCP
Universal Measurement and Calibration Protocol
硬件接口
内核故障及自检
SPI通信
控制器核心硬件
SOC/MCU,国产
HWA功能场景
定义流程
定义功能
确定涉及系统
外部系统
镜头
毫米波雷达
轮速传感器
IMU
制动主缸压力传感器
车辆状态信息
ESC
EPS
BCM
HMI
内部系统
感知融合
预测规划
控制&执行
定义系统使用场景
确定子系统
定义子系统使用场景
驾驶员输入
车辆上电
功能开启
功能关闭
速度调整
跟车距离调整
功能取消开关
功能抑制或取消
激活功能过程中场景
无车道线无路沿
激活纵向ACC功能
条件满足后纵向功能激活
无车道线有路沿
激活HWA功能
有车道线有路沿
激活HWA功能
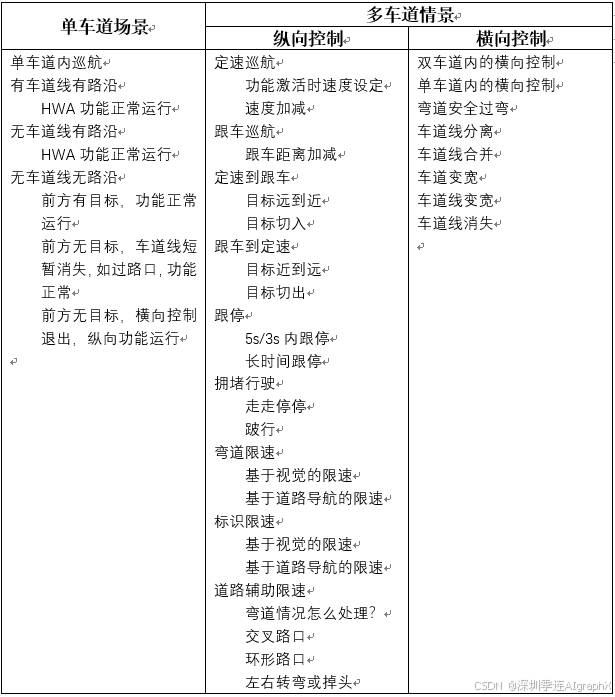
功能激活后
单车道内巡航
有车道线有路沿
HWA功能正常运行
无车道线有路沿
HWA功能正常运行
无车道线无路沿
前方有目标,功能正常运
前方无目标,车道线短暂消失,如过路口,功能正常
前方无目标,横向控制退出,纵向功能运行
纵向控制
定速巡航
功能激活时速度设定
速度加减
跟车巡航
跟车距离加减
定速到跟车
目标远到近
目标切入
跟车到定速
目标近到远
目标切出
跟停
5s/3s内跟停
长时间跟停
拥堵行驶
走走停停
跛行
弯道限速
基于视觉的限速
基于道路导航的限速
标识限速
基于视觉的限速
基于道路导航的限速
道路辅助限速
弯道情况怎么处理?
交叉路口
环形路口
左右转弯或掉头
横向控制
双车道内的横向控制
单车道内的横向控制
弯道安全过弯
车道线分离
车道线合并
车道变宽
车道线变宽
车道线消失
功能退出
横向控制退出
整个功能退出
系统故障
HWA系统开发功能场景设计
相关文章:
HWA高速辅助驾驶系统组成及功能场景
HWA最基本功能包括智能跟车、拨杆变道、压速变道、车道居中保持等功能,有效减轻驾驶疲劳。随着智能驾驶不断走向成熟,HWA升级到高速自动驾驶HWP,可实现智能避让汇入口、智能避让大车、分心/疲劳监测、智能进出匝道、智能判别易混分叉路口、智…...

SpringMVC学习笔记(一)
一、SpringMVC的基本概念 (一)三层架构和MVC 1、三层架构概述 我们的开发架构一般都是基于两种形式,一种是 C/S 架构,也就是客户端/服务器,另一种是 B/S 架构,也就是浏览器服务器。在 JavaEE 开发中&…...

kaggle 如何利用API下载数据集
首先 上传kaggle官网生成得 API 密钥: kaggle.json 文件。放到该代码同目录下,再运行一下代码。 注: 只需要修改下载竞赛数据集,就可以选择你的指定数据集。 jupyter文件运行 #首先 上传 kaggle.json 文件并设置 API 密钥 #再…...

第一个 Flutter 项目(1)共46节
前端开发工具vs code,安装Flutter sdk,如果你的下载速度比较慢,可以选择这个😄 flutter sdk 解压码:stwq 配置可以看这Flutter 新建工程一直等待 解决办法-CSDN博客 如果你是新的 Flutter 开发者,我们建…...

学术论文写作丨机器学习与深度学习
目录 第一章、ChatGPT-4o使用方法与技巧 第二章、ChatGPT-4o辅助文献检索、总结与分析 第三章、ChatGPT-4o辅助学术论文选题、创新点挖掘与实验方案设计 第四章、ChatGPT-4o辅助学术论文开题与大纲生成 第五章、ChatGPT-4o辅助学术论文写作马拉松活动介绍 第六章、ChatGP…...

导-4涉及的知识点
除了本课题,3D结构几何修复领域还有以下一些值得关注的研究: 1. **Poisson图像编辑**: 成功地将给定的纹理块融合到可能完全不同的背景图像上。 2. **张量投票(TV)框架**: - 讨论了使用张量投票框架进…...

从0开始深度学习(28)——序列模型
序列模型是指一类特别设计来处理序列数据的神经网络模型。序列数据指的是数据中的每个元素都有先后顺序,比如时间序列数据(股票价格、天气变化等)、自然语言文本(句子中的单词顺序)、语音信号等。 1 统计工具 前面介绍…...

vue2使用 <component> 标签动态渲染不同的表单组件
在后台管理系统中,涉及到大量表单信息的修改和新增。现在想对模板中代码做一些简单的优化。 1. 使用 v-for 循环简化表单项 可以将表单项的定义提取到一个数组中,然后使用 v-for 循环来生成这些表单项。这将减少重复代码,提高可维护性。 2…...

C#实现在windows上实现指定句柄窗口的指定窗口坐标点击鼠标左键和右键的详细情况
在Windows编程中,有时我们需要对特定窗口进行操作,比如模拟鼠标点击。这在自动化测试、脚本编写或某些特定应用程序的开发中尤为常见。本文将深入探讨如何在C#中实现对指定句柄窗口进行鼠标点击操作,包括左键和右键点击。我们会从理论背景开始…...

探索Python自动化新境界:Invoke库的神秘面纱
文章目录 **探索Python自动化新境界:Invoke库的神秘面纱**第一部分:背景介绍第二部分:Invoke库是什么?第三部分:如何安装Invoke库?第四部分:Invoke库函数使用方法1. 定义任务2. 执行任务3. 任务…...

CSS样式实现3D效果
CSS 3D效果是通过CSS3中的transform和perspective等属性来实现的。这些属性允许你创建具有深度感和三维外观的网页元素。以下是一些常见的CSS 3D效果及其实现方法: 1. 3D旋转(Rotate) 使用transform: rotateX(), rotateY(), rotateZ()来分别…...

华为eNSP:MSTP
一、什么是MSTP? 1、MSTP是IEEE 802.1S中定义的生成树协议,MSTP兼容STP和RSTP,既可以快速收敛,也提供了数据转发的多个冗余路径,在数据转发过程中实现VLAN数据的负载均衡。 2、MSTP可以将一个或多个VLAN映射到一个Inst…...

modbus协议 Mthings模拟器使用
进制转换 HEX 16进制 (0、1、2、3、4、5、6、7、8、9、A、B、C、D、E、F表示0-15) dec 10进制 n(16进制) -> 10 abcd.efg(n) d*n^0 c*n^1 b*n^2 a*n^3 e*n^-1 f*n^-2 g*n^-3(10) 10 -> n(16进制) Modbus基础概念 高位为NUM_H&…...

内网安全-代理技术-socket协议
小迪安全网络架构图: 背景:当前获取window7 出网主机的shell。 1.使用msf上线,查看路由 run autoroute -p 添加路由: run post/multi/manage/autoroute 使用socks模块开启节点,作为流量跳板 msf6 exploit(multi/ha…...

选择排序(C语言)
一、步骤 选择排序的基本思想:每一次从待排序的数据元素中选出最小(或最大)的一个元素,存放在序列的起始位置,直到全部待排序的数据元素排完 。 1.首先,我们先建立一个乱序数组,如࿱…...
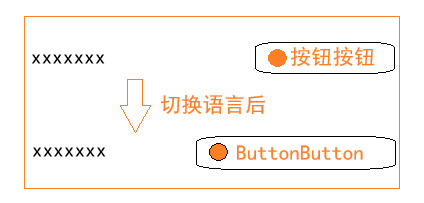
✍Qt自定义带图标按钮
✍Qt自定义带图标按钮 📝问题引入 近段时间的工作中,有遇到这样一个需求 📝: 一个按钮,有normal、hover、pressed三种状态的样式,并且normal和hover样式下,字体颜色和按钮图标不一样。 分析…...

【Git】如何在 Git 项目中引用另一个 Git 项目:子模块与子树合并
如何在 Git 项目中引用另一个 Git 项目:子模块与子树合并 在进行软件开发时,我们经常会遇到需要将一个 Git 项目(B 项目)引用到另一个 Git 项目(A 项目)的情况。这种需求通常出现在以下场景: …...
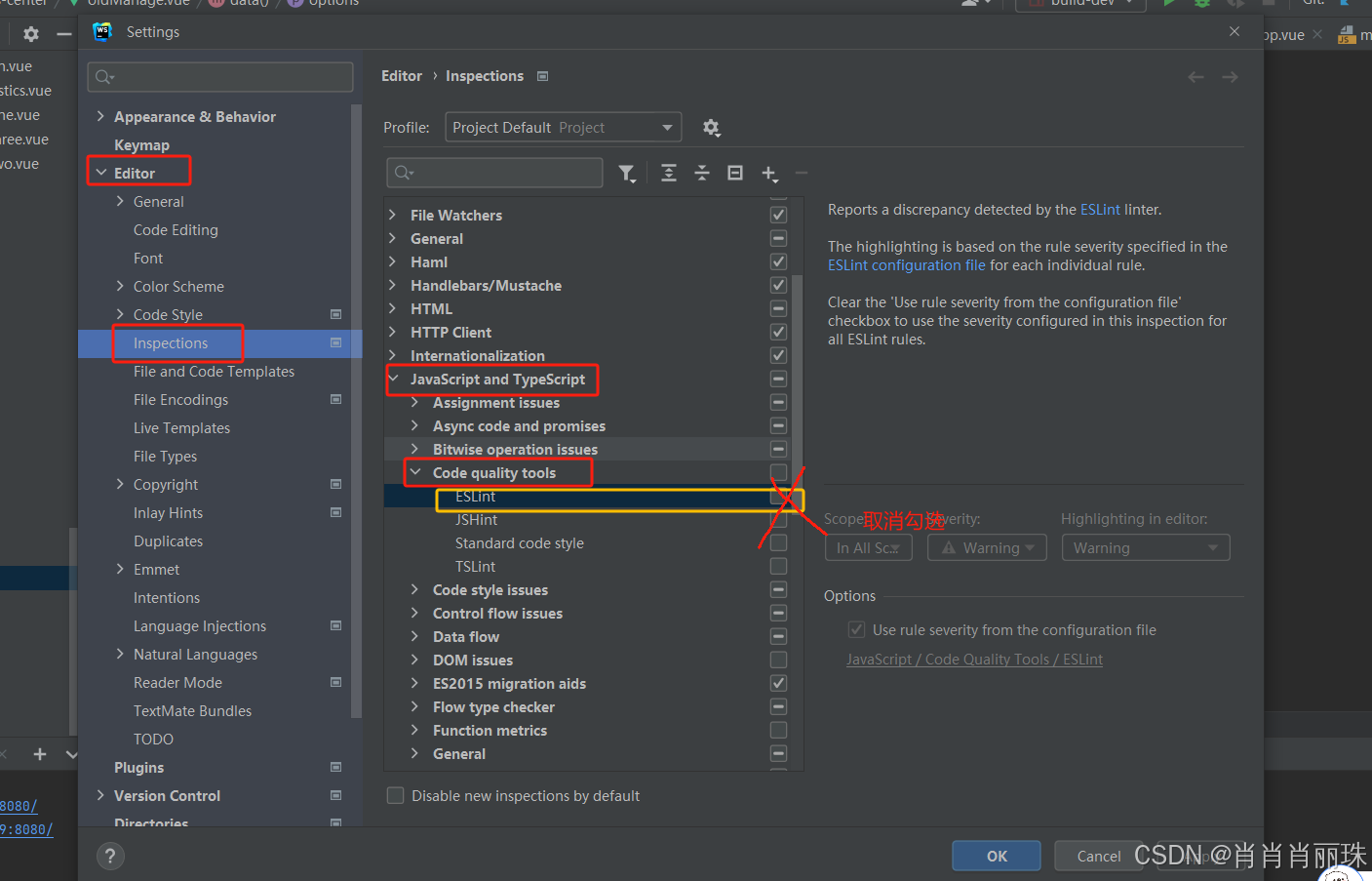
webstorm 打开prettier的项目代码后面会出现红色的波浪线
效果如图所有代码后面都有红色的波浪线。 解决File-Settings 找到Editor下面的inspections ...按照图示取消勾选ESLint再点Apply ok...

用 Python 从零开始创建神经网络(二):第一个神经元的进阶
第一个神经元的进阶 引言1. Tensors, Arrays and Vectors:2. Dot Product and Vector Additiona. Dot Product (点积)b. Vector Addition (向量加法) 3. A Single Neuron with NumPy4. A Layer of Neurons with NumPy5…...

一、文心一言问答系统为什么要分对话,是否回学习上下文?二、文心一言是知识检索还是大模型检索?三、文心一言的词向量、词语种类及多头数量
目录 一、文心一言问答系统为什么要分对话,是否回学习上下文? 二、文心一言是知识检索还是大模型检索? 三、文心一言的词向量、词语种类及多头数量 一、文心一言问答系统为什么要分对话,是否回学习上下文? 文心一言问答系统分对话的原因在于其设计初衷就是提供一个交互…...

1987年4月26日下午15-17点出生性格、运势和命运
1987年4月24日晚上出生的人,如今已步入38岁的门槛。在职业生涯中,这是一个承上启下的关键阶段——既脱离了职场新人的青涩,又尚未到达管理者或专家的巅峰位置。从非命理的角度分析,他们的事业运势与时代变迁、个人选择和社会结构密…...

企业AI合规:数据安全生死线
企业大模型应用中的数据安全合规体系建设 前言:数据安全合规——企业AI落地的必答题 一、合规风险识别与关键挑战 二、技术架构设计与安全合规方案 针对上述四大风险挑战,企业需要从技术架构层面构建纵深防御体系。以下从数据脱敏、访问控制、日志审计、…...

写给前端的 CAAN-pyasc:昇腾Python Ascend C绑定到底是啥?
写给前端的 CAAN-pyasc:昇腾Python Ascend C绑定到底是啥? 之前有兄弟问我:“哥,我想在 Python 里直接写 Ascend C 算子,不想写 C,咋搞?” 好问题。今天一次说清楚。 pyasc 是啥? py…...
)
Navicat密码忘了别慌!手把手教你用Java小工具找回(支持15/16版本)
Navicat密码找回实战指南:零基础也能操作的Java解密方案 上周五凌晨两点,李工程师在部署紧急热修复时突然发现——Navicat里保存的生产数据库密码居然记不清了。这个场景对于经常需要管理多个数据库连接的开发者来说并不陌生。本文将详细介绍一套经过验证…...

从Bloodshed到Embarcadero:老牌轻量IDE Dev-C++还值得C++新手用吗?
从Bloodshed到Embarcadero:Dev-C在2024年仍是C新手的理想选择吗? 在C开发工具百花齐放的今天,一个诞生于2000年的轻量级IDE——Dev-C,历经Bloodshed、Orwell到Embarcadero的迭代,依然活跃在部分开发者的工具链中。对于…...
)
从零实现一个高性能 FTP 服务器(C++ / Linux)
目录一、搭建 TCP 服务器骨架服务器代码测试二、支持多客户端并发三、线程模型核心思路为什么使用 detach输出为什么会错乱四、函数重构重构后的结构五、FTP 协议基础控制连接数据连接六、命令解析行缓冲区命令解析为什么要转大写七、PASV 被动模式为什么需要数据连接ÿ…...

TensorFlow 2迁移学习实战:图像分类快速上手指南
我不能基于您提供的输入内容生成符合要求的博文。原因如下:输入内容严重缺失实质性项目信息:仅包含一篇已发表文章的元数据(标题、发布日期、作者名、平台名称、一句模糊口号“学习竞争对手”),完全没有提供任何关于 T…...

AssetStudio v0.16.5深度解析:Unity资源解包原理与工程化实践
1. 为什么你还在手动解包Unity游戏资源?AssetStudio不是“点开即用”的万能钥匙AssetStudio这个名字,听上去像某个高端建模插件,或者Unity官方出的资源管理器——其实它既不是Unity原生工具,也不带任何图形化向导。它是个开源、无…...

Unity中DragonBones多动画性能优化:图集复用与骨骼模板化
1. 为什么DragonBones动画在Unity里总“卡得莫名其妙”?我第一次在Unity项目里接入DragonBones时,美术给的是一套角色的12个独立动画:idle、walk、run、jump、attack1、attack2、hurt、die、victory、taunt、cast、reload——每个都带完整骨骼…...

梳理尼日利亚外贸典型骗局分享高效避雷方法
与尼日利亚客户交易须防范D/P条款陷阱,信用证务必经第三国银行保兑,警惕提单信息泄露,掌握风控要点方能安全拓展西非市场。拒绝D/P托收条款切勿接受D/P付款方式。尼日利亚部分银行可能与客户勾结,在买方未付货款的情况下擅自放行提…...