Isaac Sim+SKRL机器人并行强化学习
目录
Isaac Sim介绍
OmniIssacGymEnvs安装
SKRL安装与测试
基于UR5的机械臂Reach强化学习测评
机器人控制
OMNI GYM环境编写
SKRL运行文件
训练结果与速度对比
结果分析
运行体验与建议
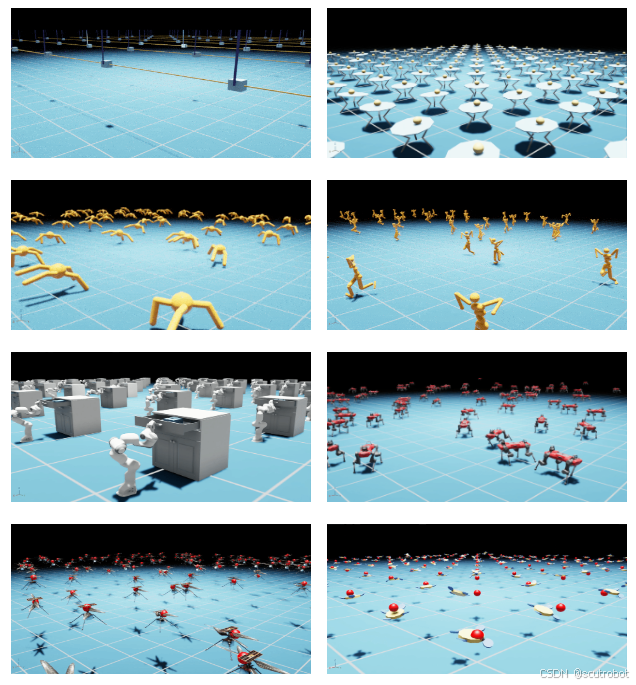
Isaac Sim介绍
Isaac Sim是英伟达出的一款机器人仿真平台,适用于做机器人仿真。同类产品包括mujoco,vrep和pybullt等,它的主要优势就是可以做并行强化学习仿真,这对于提高训练效率是非常有好处的。
作者使用的版本是 :ISAAC SIM 2023.1,因为isaac sim每次版本的迭代变化都很大,而isaac 4.0 又是大更改,因此我还是在2023.1版本上进行测试的。
之前使用isaac sim没有进行并行化训练,原因就是如果想用并行化训练单纯使用isaac sim是搞不出来的,还要搭配另外的环境,例如2023.1就要使用OmniIsaacGymEnvs,或者ORbit。如果是4.0的用户就是使用isaac lab了。
OmniIssacGymEnvs安装
IsaacGymEnvs的安装非常简单,按照官方仓库readme安装即可
GitHub - isaac-sim/OmniIsaacGymEnvs: Reinforcement Learning Environments for Omniverse Isaac Gym
OmniIsaacGymEnvs 提供了很多经典的强化学习训练场景,最典型的就是Cartpole环境了。
安装步骤:
1. git clone https://github.com/NVIDIA-Omniverse/OmniIsaacGymEnvs.git 下载仓库
2. 将默认执行的python设置为Isaac sim环境执行的python
For Linux: alias PYTHON_PATH=~/.local/share/ov/pkg/isaac_sim-*/python.sh
For Windows: doskey PYTHON_PATH=C:\Users\user\AppData\Local\ov\pkg\isaac_sim-*\python.bat $*
For IsaacSim Docker: alias PYTHON_PATH=/isaac-sim/python.sh3.安装 omniisaacgymenvs 模块
PYTHON_PATH -m pip install -e .按照官方的指示,这样就可以把仓库安装好了,然后执行,就可以测试官方给的例程。
PYTHON_PATH scripts/rlgames_train.py task=Cartpole但是注意到,这里用的是rlgames作为强化学习的库,这并不是一个常见的库,实际上英伟达自己在论坛上在推行一个叫做SKRL的库。
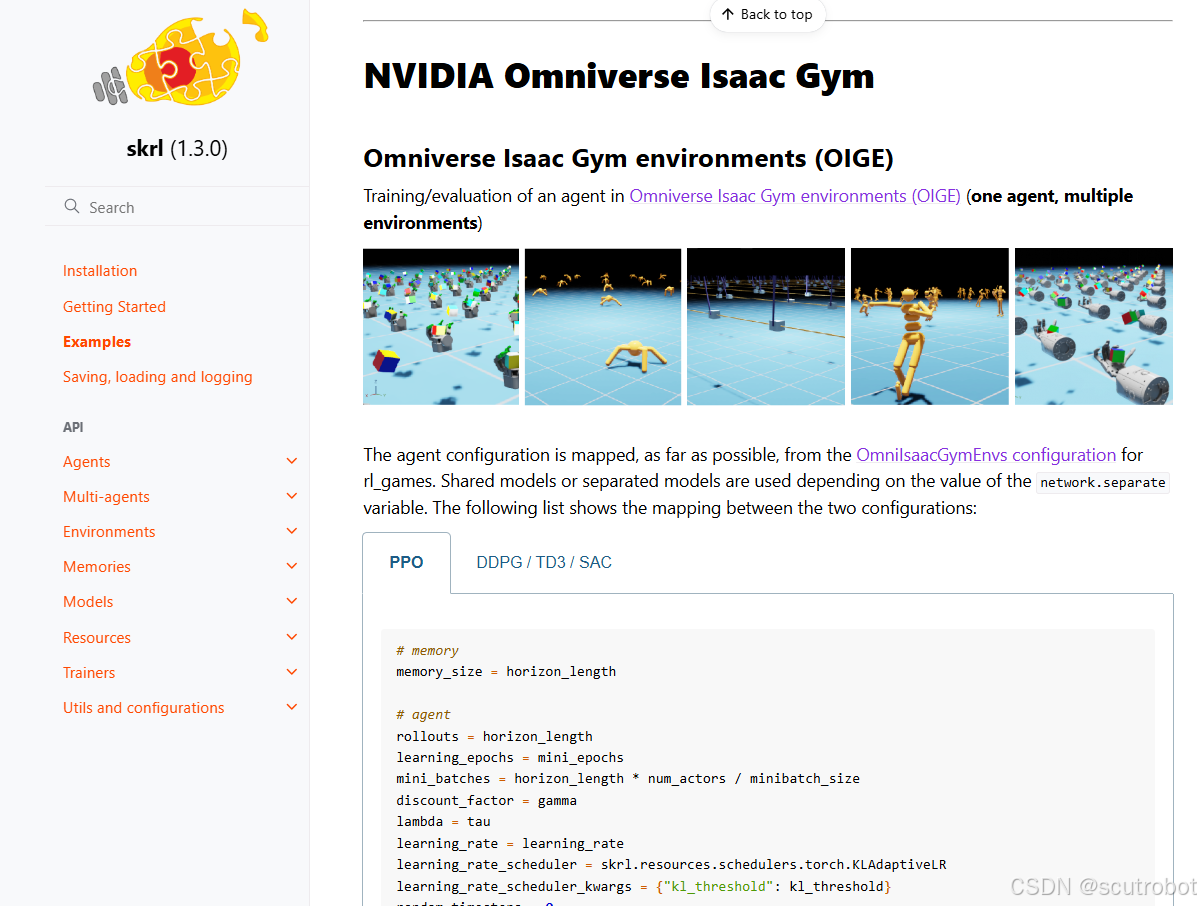
SKRL安装与测试
SKRL网址:Examples - skrl (1.3.0)
SKRL是英伟达自己推荐的一个强化学习库,它的优势在于可以无缝衔接英伟达自己的并行仿真环境,虽然说训练效果可能不如SB3好,但是它适配了啊。并且在使用多智能体的时候训练速度也是挺快的。
pip install skrl["torch"]SKRL的安装按照官方的教程直接装就可以了。
这里需要特别注意的是OIGE的配置文件和rlgame是不一样的,具体可以参考官方给出的example,在yaml文件中要做一些修改。
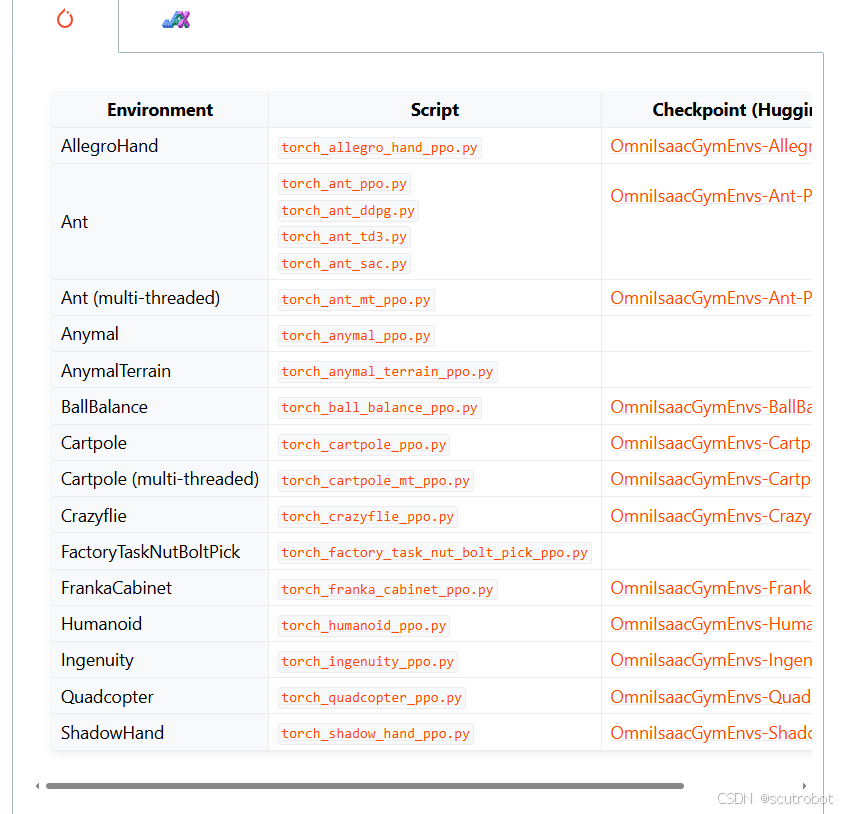
把skrl官方提供的yaml文件下载下来,并使用它给出的python文件运行,就可以将官方给的demo跑起来了。
这里作者使用的GPU是4060TI 16G的版本
在环境中设置了4096个agent,运行起来还是非常顺畅的,训练了1600个回合,只花了1分钟左右

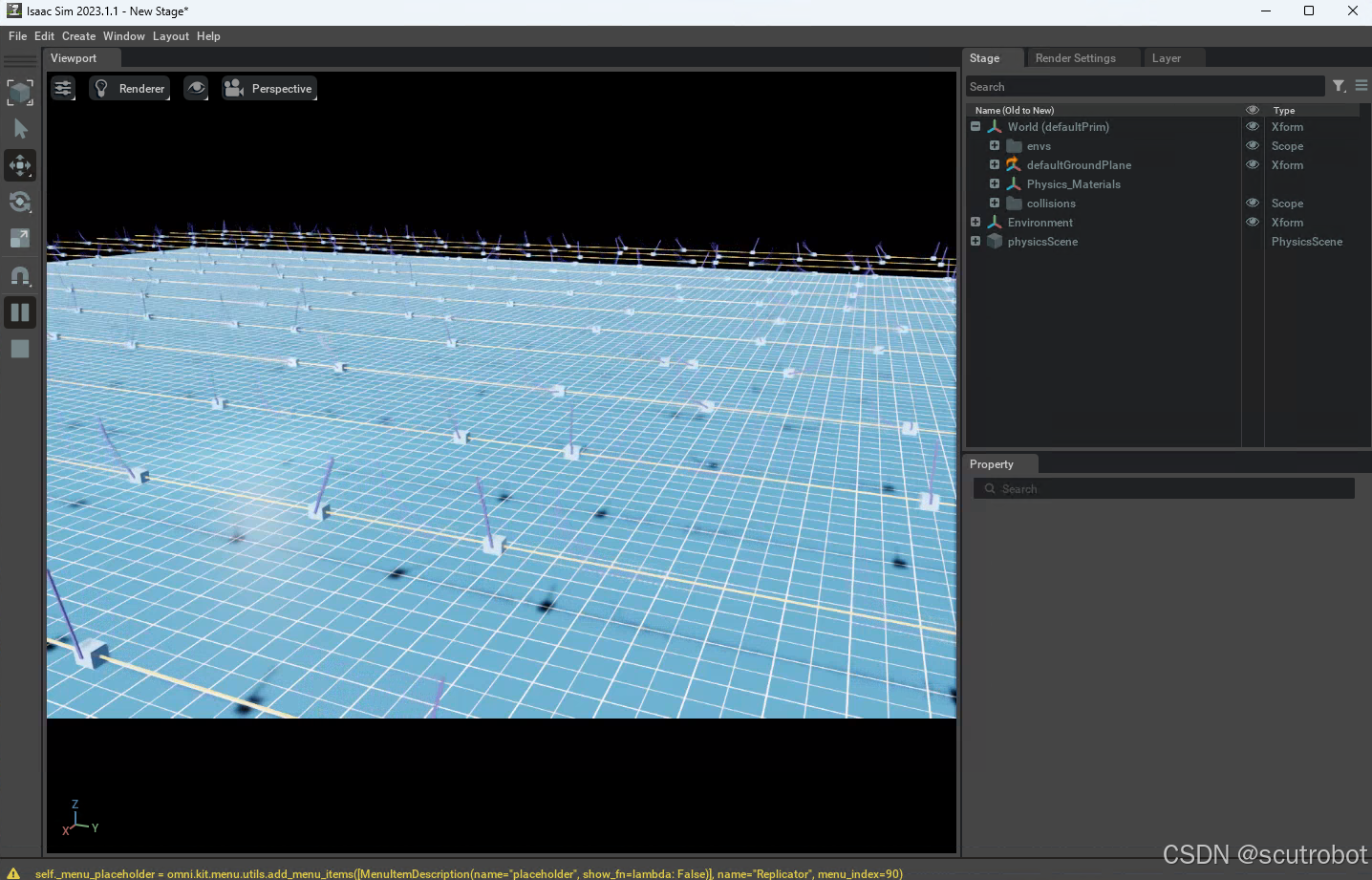
另外,官方提供了headless可选性,当headless设置成True时,就不会显示界面,这时候运行速度会更加快,1600个回合只需要15秒钟不到的时间即可完成。

可以看到,SKRL与omni isaac gym的衔接还是比较OK的,至少官方给出的例程运行起来是没什么问题的。
基于UR5的机械臂Reach强化学习测评
机器人控制
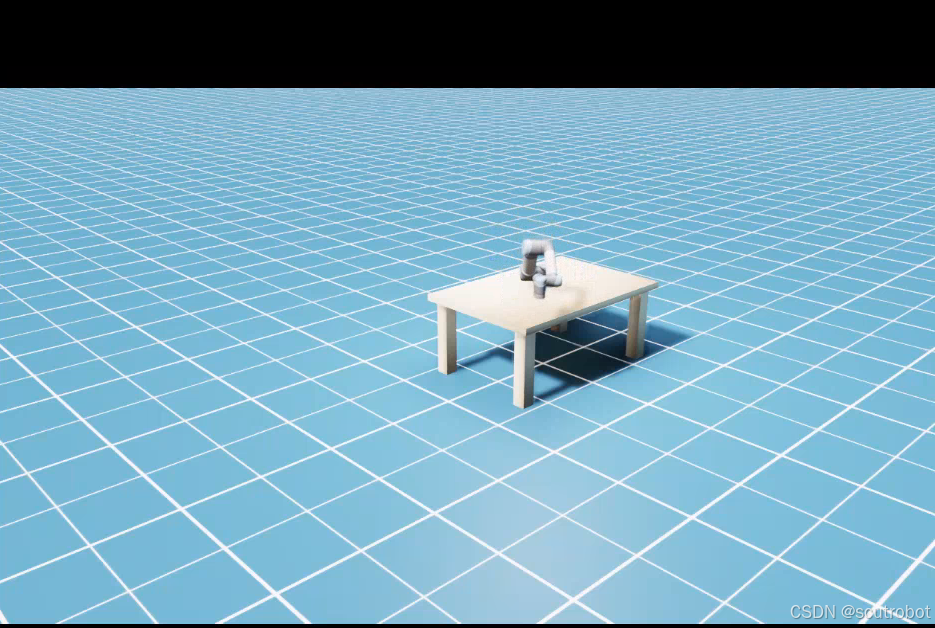
在测试完官方给出的环境后,肯定是希望可以测试下自己的环境。作者自己使用的是UR5机械臂,isaac sim中本身已经提供了这一款机械臂了,所以模型直接下载下来就可以,是usd格式的模型。
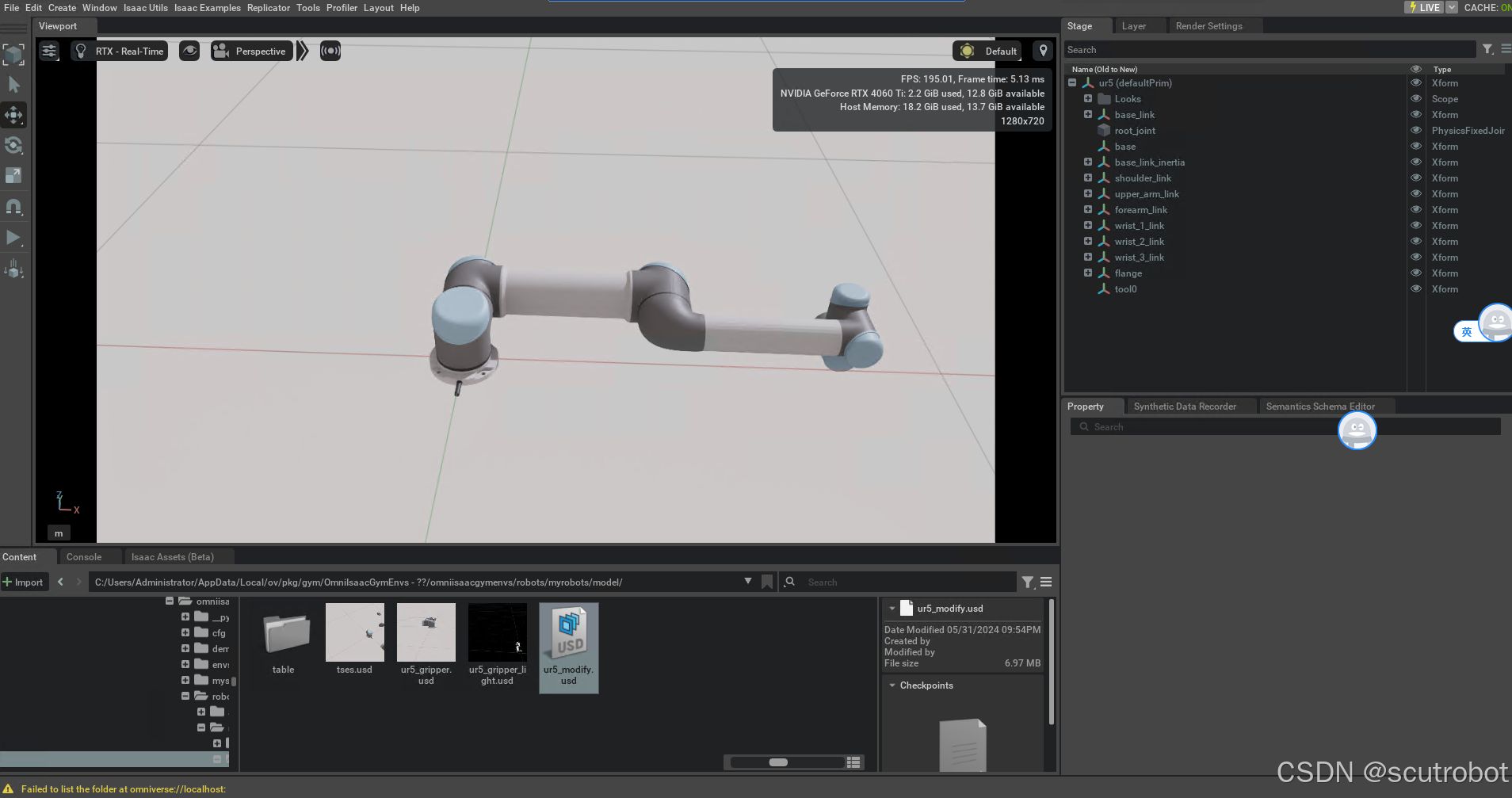
在机器人控制方面,官方提供的是RMPFLOW的轨迹规划库,但是RMPFLOW本身要配置很多东西,官方只提供了UR10的配置文件,因此这里我选用了最简单的控制方法。在网上下载了UR5的urdf文件,然后使用ikpy函数库读取urdf文件,并进行逆运动学求解,把求解出来的关节角度再下发到模型中。这里提供我写的UR5函数控制类作为参考:
from typing import Optionalimport carb
import numpy as np
import torch
from omni.isaac.core.robots.robot import Robot
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.core.utils.stage import add_reference_to_stage
from omni.isaac.core.articulations import ArticulationView,Articulation
from omni.isaac.core.utils.types import ArticulationAction, ArticulationActions
from common import MatrixProcess as mp
from omni.isaac.core.prims import RigidPrim, RigidPrimView,XFormPrimView
import common.robot.Urik as urik
from common.robot.Ur5ik import Kinematic
import logging
class UR5(Robot):def __init__(self,prim_path: str,ik_urdfPath:str,name: Optional[str] = "UR5",tcpOffset_pose=np.array([0,0,0]),tcpOffset_ori=np.array([1,0,0,0]),usd_path: Optional[str] = None,translation: Optional[np.ndarray] = None,orientation: Optional[np.ndarray] = None,) -> None:self._usd_path = usd_pathself._name = nameif self._usd_path is None:self._usd_path = "C:\\Users\\Administrator\\AppData\\Local\\ov\\pkg\\gym\\OmniIsaacGymEnvs\\omniisaacgymenvs\\robots\\myrobots\\model\\ur5_modify.usd"print("=== _usd_path=", self._usd_path)add_reference_to_stage(self._usd_path, prim_path)super().__init__(prim_path=prim_path,name=name,translation=translation,orientation=orientation,articulation_controller=None,)self.robot_position=torch.tensor([translation[0],translation[1],translation[2]]).to("cuda")self.tcpoffset_pose = tcpOffset_poseself.tcpOffset_quaternion = tcpOffset_oriself._iksolver = Kinematic()def initView(self):self._ur5_view=ArticulationView(prim_paths_expr="/World/envs/.*/UR5", name="ur5_view", reset_xform_properties=False)self._ur5_ee_view=RigidPrimView(prim_paths_expr="/World/envs/.*/UR5/tool0", name="ur5_ee", reset_xform_properties=False)def get_view(self):return self._ur5_viewdef get_joints(self):joints=self._ur5_view.get_joint_positions()#print("joint",np.round(joints.cpu().numpy(),2))return jointsdef get_TCP_pose(self,isworld):pose,rot=self._ur5_ee_view.get_local_poses()#获取机器人坐标系下的坐标,xyzw?if isworld==True:pose=pose+self.robot_position# 加上机器人坐标系距离原点的位移#print("pose",np.round(pose.cpu().numpy(),4))return pose,rotdef set_joints(self,Joints6D,indices):self._ur5_view.set_joint_positions(Joints6D, indices=indices)def apply_joints(self,Joints6D,indices):joints = ArticulationActions(Joints6D)self._ur5_view.apply_action(joints,indices=indices)def set_pose(self, position, oriention,desire_joints, apply=False, isworldpose=True):"""apply=True时,使用applay actionisworldpose=True时,转化至世界坐标系"""position=position.cpu().numpy()oriention=oriention.cpu().numpy()desire_joints=desire_joints.cpu().numpy()robot_position=self.robot_position.cpu().numpy()if (isworldpose == True):position = position - robot_position####根据tcp坐标,反求末端坐标,然后求解ikTbase_tcp = positionQbase_tcp = mp.qua_wxyz2xyzw_array(oriention) # xyzwTend_tcp = self.tcpoffset_poseQend_tcp = mp.qua_wxyz2xyzw(self.tcpOffset_quaternion)# 计算末端姿态Q_TCP_inv = mp.quaternion_conjugate(Qend_tcp)Q_end = mp.quaternion_multiply_array(Qbase_tcp, Q_TCP_inv)# 计算末端位置T_TCP_transformed = mp.rotate_vectors_array(Qbase_tcp, Tend_tcp)T_end = Tbase_tcp - T_TCP_transformedposition = T_endoriention = mp.qua_xyzw2wxyz_array(Q_end)##### 1,根据pose6d 计算IK jointresult=self.get_iks(position,oriention,desire_joints)joints=torch.tensor(result).float().to("cuda")if (apply == False):self._ur5_view.set_joint_positions(joints)else:joints = ArticulationAction(joints)self._ur5_view.apply_action(joints)def get_iks(self, positions, orientions,q_desires):len=positions.shape[0]joints=[]for i in range(len):position=positions[i]oriention=orientions[i]q_desire=q_desires[i]joint=self.get_ik(position,oriention,q_desire)joints.append(joint)#print(np.round(joint,2))return np.array(joints)def get_ik(self, pose, ori,q_desire):"""输入机器人末端的目标位置,计算逆运动学关节,返回计算用于apply action的ArticulationActionArgs:pose: 目标位置ori: 目标方向initjoint: 用于求逆运动学的初始关节Returns:计算用于apply action的ArticulationAction"""try:joint=self._iksolver.inverse_kinematic_Q(pose=pose,ori=ori,q_desire=q_desire)return jointexcept:return q_desireOMNI GYM环境编写
以及自己写的reach gym环境。这个环境编写的教程现在官方的手册是看不到的,如果你还是跟我一样使用2023.1版本,那么你可以看下旧版本的手册是如何教你写这个的。
import logging
import math
import randomimport numpy as np
import torch
from omni.isaac.core.articulations import ArticulationView
from omni.isaac.core.utils.prims import get_prim_at_path
from omniisaacgymenvs.tasks.base.rl_task import RLTask
from omniisaacgymenvs.robots.articulations.cartpole import Cartpole
from omniisaacgymenvs.robots.myrobots.ur5 import UR5
from omni.isaac.core.utils.stage import add_reference_to_stage
from omni.isaac.core.prims import RigidPrim, RigidPrimView,XFormPrimViewclass Ur5_InsertTask(RLTask):def __init__(self, name, sim_config, env, offset=None) -> None:self.update_config(sim_config)self._max_episode_length = 150self._num_observations = 3self._num_actions = 3self._reset_pose=torch.tensor(np.array([0, math.radians(-90), math.radians(-90), math.radians(-90), math.radians(90), math.radians(0)]), dtype=torch.float32).to("cuda")RLTask.__init__(self, name, env)def update_config(self, sim_config):# extract task config from main config dictionaryself._sim_config = sim_configself._cfg = sim_config.configself._task_cfg = sim_config.task_config# parse task config parametersself._num_envs = self._task_cfg["env"]["numEnvs"]self._env_spacing = self._task_cfg["env"]["envSpacing"]self._cartpole_positions = torch.tensor([0.0, 0.0, 0.65])def set_up_scene(self, scene) -> None:# first create a single environmentself.get_ur5()self.get_table()self.get_cube()super().set_up_scene(scene)self.ur5.initView()scene.add(self.ur5.get_view())self._cubes = XFormPrimView(prim_paths_expr="/World/envs/.*/prop/.*", name="prop_view", reset_xform_properties=False)scene.add(self._cubes)def pre_physics_step(self, actions) -> None:if not self.world.is_playing():returnreset_env_ids = self.reset_buf.nonzero(as_tuple=False).squeeze(-1)#只获取没有复位的环境if len(reset_env_ids) > 0:self.reset_idx(reset_env_ids)#TODO:复位的环境动作清零#获取当前位置joints = self.ur5.get_joints()self.cube_pos, self.cube_rot = self._cubes.get_local_poses()self.tcp_pos,self.tcp_rot=self.ur5.get_TCP_pose(isworld=True)#设置动作增量target=self.tcp_pos+actions*0.05#执行动作self.ur5.set_pose(target, self.cube_rot, joints, apply=True)#self.ur5.set_pose(self.cube_pos, self.cube_rot, joints, apply=True)def get_observations(self) -> dict:cube_pos, cube_rot = self._cubes.get_local_poses()self.tcp_pos,self.tcp_rot=self.ur5.get_TCP_pose(isworld=True)#计算与目标的误差,作为关节角度pos_error= cube_pos - self.tcp_pospos_error=torch.clip_(pos_error,-1,1)self.obs_buf[:,0] = pos_error[:,0]self.obs_buf[:,1] = pos_error[:,1]self.obs_buf[:,2] = pos_error[:,2]observations = {self.ur5.get_view().name: {"obs_buf": self.obs_buf}}return observationsdef calculate_metrics(self) -> None:# assign rewards to the reward bufferdistances=torch.norm(self.cube_pos-self.tcp_pos,dim=1)#reward=torch.where(distances<0.002,50,0)#reward = torch.where(distances >= 0.002, -distances, reward)#reward = torch.where(distances >0.1, -50, reward)#reward=torch.where(distances >= 0.002, -distances, 100)#reward=-distances# reward = torch.where(distances < 0.01, 1, -distances)# reward = torch.where(distances < 0.002, 100, reward)# reward+=-0.1reward=-distancesreward = torch.where(distances < 0.005, 50, 0)#logging.warning(reward)#reward=50self.rew_buf[:] = rewarddef is_done(self) -> None:distances = torch.norm(self.cube_pos - self.tcp_pos, dim=1)distance_x=abs(self.cube_pos[:,0]-self.tcp_pos[:,0])distance_y=abs(self.cube_pos[:,1]-self.tcp_pos[:,1])distance_z = abs(self.cube_pos[:, 2] - self.tcp_pos[:, 2])resets=torch.where(distances<0.005,1,0)reset_env_ids = resets.nonzero(as_tuple=False).squeeze(-1)#只获取没有复位的环境if(len(reset_env_ids)>0):logging.warning(msg=("成功个数:",len(reset_env_ids)))resets = torch.where((distance_x > 0.11) | (distance_y > 0.11) | (distance_z > 0.11),torch.tensor(1, dtype=resets.dtype), resets)resets = torch.where(self.progress_buf >= self._max_episode_length, torch.tensor(1, dtype=resets.dtype), resets)self.reset_buf[:] = resetsreturndef post_reset(self):reset_tensor = self._reset_pose.repeat(self._num_envs, 1)#(6->(envs,6))self.ur5.set_joints(reset_tensor, indices=torch.arange(self._num_envs))def reset_idx(self, env_ids):self.update_cube(env_ids)num_resets = len(env_ids)random_array = np.random.rand(num_resets, 3)# 将其缩放到 [-0.2, 0.2)noise = (random_array - 0.5) * 0.2cube_pose=self.cube_posegoal=cube_pose+torch.tensor(noise).cuda()goal=goal-self.ur5.robot_positionintijoint=np.repeat(self._reset_pose.cpu().numpy()[np.newaxis, :], num_resets, axis=0)joints=self.ur5.get_iks(goal.cpu().numpy(),self.origin_cube_orientation.cpu().numpy(),intijoint)joints=torch.tensor(joints, dtype=torch.float32).cuda()indices = env_ids.to(dtype=torch.int32)self.ur5.set_joints(joints, indices=indices)# bookkeepingself.reset_buf[env_ids] = 0self.progress_buf[env_ids] = 0################################def get_cartpole(self):# add a single robot to the stagecartpole = Cartpole(prim_path=self.default_zero_env_path + "/Cartpole", name="Cartpole", translation=self._cartpole_positions)# applies articulation settings from the task configuration yaml fileself._sim_config.apply_articulation_settings("Cartpole", get_prim_at_path(cartpole.prim_path), self._sim_config.parse_actor_config("Cartpole"))def get_ur5(self):self.ur5=UR5(prim_path=self.default_zero_env_path + "/UR5", name="UR5", translation=self._cartpole_positions,ik_urdfPath="E:\\1_Project\\py\\paper3\\sim-force2-real\\model\\ur5new\\ur_description-main\\ur_description-main\\urdf\\ur5.urdf")def get_table(self):usdpath="C:\\Users\\Administrator\\AppData\\Local\\ov\\pkg\\gym\\OmniIsaacGymEnvs\\omniisaacgymenvs\\robots\\myrobots\\model\\table\\table.usd"add_reference_to_stage(usdpath, prim_path=self.default_zero_env_path + "/table")def get_cube(self):from omni.isaac.core.objects import VisualCuboidcube_pose=np.array([0.5, 0.3, 1.00])cube_orientation=np.array([0.0000000000, 1, 0, 0.0000000])self.origin_cube_pose=torch.tensor(np.tile(cube_pose, (self.num_envs, 1))).cuda()self.origin_cube_orientation=torch.tensor(np.tile(cube_orientation, (self.num_envs, 1))).cuda()VisualCuboid(prim_path=self.default_zero_env_path + "/prop/prop_0",name="fancy_cube",position=cube_pose,orientation=cube_orientation,scale=np.array([0.05015, 0.05015, 0.05015]),color=np.array([0, 0, 1.0]),)def update_cube(self,indices):n = len(indices)# Generate (n, 3) random numbers in the range (-0.3, 0.3)random_offsets = (torch.rand((n, 3)) * 0.5 - 0.3).cuda()self.cube_pose=self.origin_cube_pose[indices]+random_offsetsself._cubes.set_local_poses(self.cube_pose,self.origin_cube_orientation,indices)def set_task_parameters(self):self.init_error_xyz=0.05SKRL运行文件
接着是SKRL运行的主程序文件:
import torch
import torch.nn as nn# import the skrl components to build the RL system
from skrl.agents.torch.sac import SAC, SAC_DEFAULT_CONFIG
from skrl.envs.loaders.torch import load_omniverse_isaacgym_env
from skrl.envs.wrappers.torch import wrap_env
from skrl.memories.torch import RandomMemory
from skrl.models.torch import DeterministicMixin, GaussianMixin, Model
from skrl.resources.preprocessors.torch import RunningStandardScaler
from skrl.trainers.torch import SequentialTrainer
from skrl.utils import set_seed# seed for reproducibility
set_seed() # e.g. `set_seed(42)` for fixed seed# define models (stochastic and deterministic models) using mixins
class StochasticActor(GaussianMixin, Model):def __init__(self, observation_space, action_space, device, clip_actions=False,clip_log_std=True, min_log_std=-2, max_log_std=2):Model.__init__(self, observation_space, action_space, device)GaussianMixin.__init__(self, clip_actions, clip_log_std, min_log_std, max_log_std)self.net = nn.Sequential(nn.Linear(self.num_observations, 256),nn.ELU(),nn.Linear(256, 256),nn.ELU())self.mean_layer = nn.Sequential(nn.Linear(256, self.num_actions),nn.Tanh())self.log_std_parameter = nn.Parameter(torch.zeros(self.num_actions))def compute(self, inputs, role):action=self.mean_layer(self.net(inputs["states"]))log=self.log_std_parameteroutput={}return action,log,outputclass Critic(DeterministicMixin, Model):def __init__(self, observation_space, action_space, device, clip_actions=False):Model.__init__(self, observation_space, action_space, device)DeterministicMixin.__init__(self, clip_actions)self.net = nn.Sequential(nn.Linear(self.num_observations + self.num_actions, 256),nn.ELU(),nn.Linear(256, 1),nn.ELU())def compute(self, inputs, role):return self.net(torch.cat([inputs["states"], inputs["taken_actions"]], dim=1)), {}# load and wrap the Omniverse Isaac Gym environment
env = load_omniverse_isaacgym_env(task_name="Ur5Insert")
env = wrap_env(env)device = env.device# instantiate a memory as rollout buffer (any memory can be used for this)
memory = RandomMemory(memory_size=1000000, num_envs=env.num_envs, device=device)# instantiate the agent's models (function approximators).
# SAC requires 5 models, visit its documentation for more details
# https://skrl.readthedocs.io/en/latest/api/agents/sac.html#models
models = {}
models["policy"] = StochasticActor(env.observation_space, env.action_space, device)
models["critic_1"] = Critic(env.observation_space, env.action_space, device)
models["critic_2"] = Critic(env.observation_space, env.action_space, device)
models["target_critic_1"] = Critic(env.observation_space, env.action_space, device)
models["target_critic_2"] = Critic(env.observation_space, env.action_space, device)# configure and instantiate the agent (visit its documentation to see all the options)
# https://skrl.readthedocs.io/en/latest/api/agents/sac.html#configuration-and-hyperparameters
cfg = SAC_DEFAULT_CONFIG.copy()
cfg["gradient_steps"] = 1
cfg["batch_size"] = 4096
cfg["discount_factor"] = 0.99
cfg["polyak"] = 0.005
cfg["actor_learning_rate"] = 5e-4
cfg["critic_learning_rate"] = 5e-4
cfg["random_timesteps"] = 80
cfg["learning_starts"] = 80
cfg["grad_norm_clip"] = 0
cfg["learn_entropy"] = True
cfg["entropy_learning_rate"] = 5e-3
cfg["initial_entropy_value"] = 1.0
cfg["state_preprocessor"] = RunningStandardScaler
cfg["state_preprocessor_kwargs"] = {"size": env.observation_space, "device": device}
# logging to TensorBoard and write checkpoints (in timesteps)
cfg["experiment"]["write_interval"] = 800
cfg["experiment"]["checkpoint_interval"] = 8000
cfg["experiment"]["directory"] = "runs/torch/Ur5InsertSAC"agent = SAC(models=models,memory=memory,cfg=cfg,observation_space=env.observation_space,action_space=env.action_space,device=device)# configure and instantiate the RL trainer
cfg_trainer = {"timesteps": 160000, "headless": True}
trainer = SequentialTrainer(cfg=cfg_trainer, env=env, agents=agent)# start training
trainer.train()训练结果与速度对比
在这里,我使用的是SAC,并且在yaml配置文件里面改了很多参数,最终才把整个程序跑起来并成功训练。不得不吐槽一下,SKRL对于这么一个简单的任务,竟然对超参数那么敏感,我使用PPO甚至训练了5W步都不收敛,跟SB3比还是有点差距的。
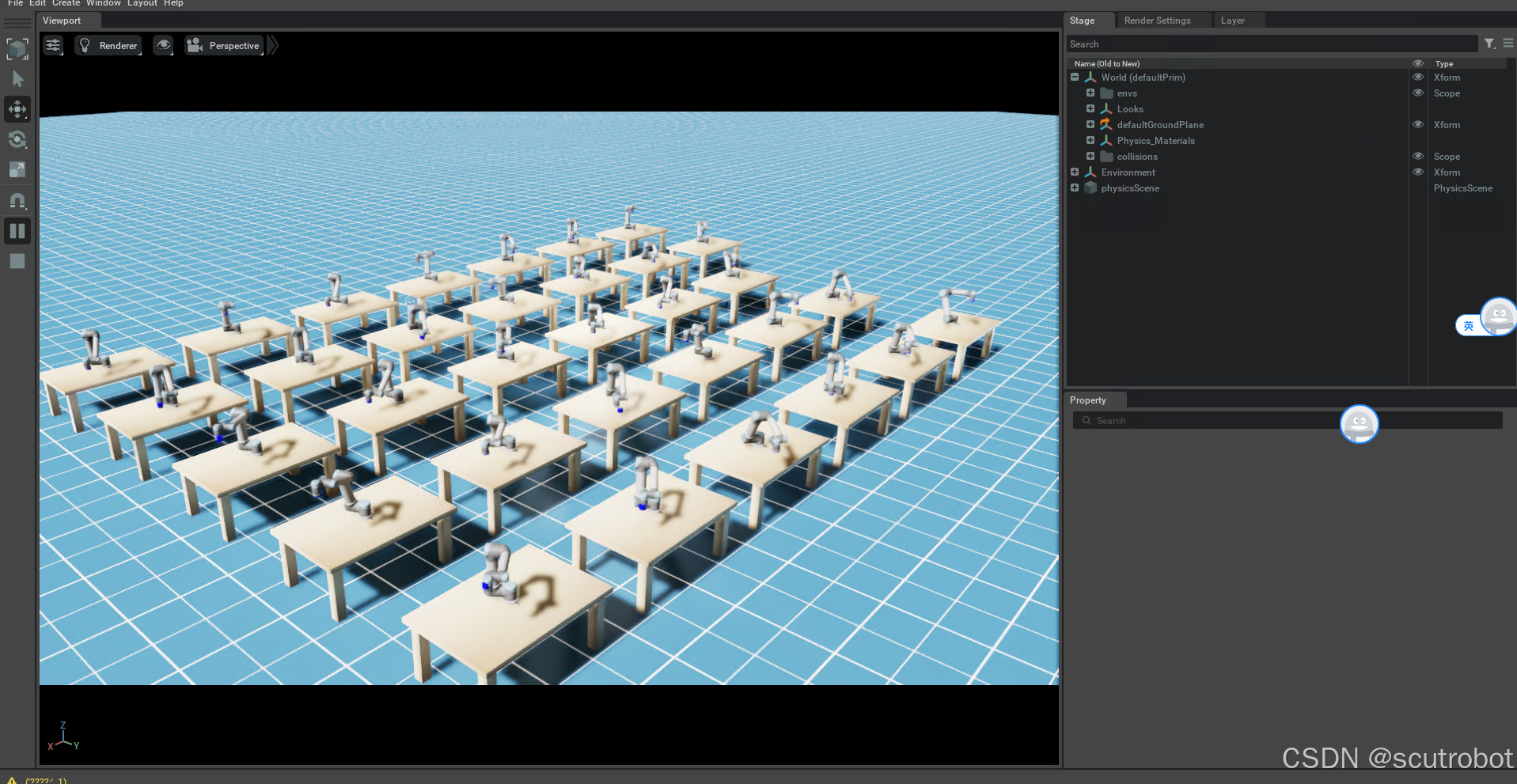
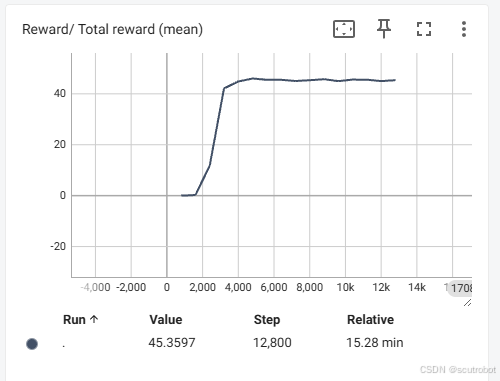
这里我只设置了32个agent,SAC大概在1000步左右就学会了怎么reach。1000步的时间大概花了1分半钟。不得不说,这个速度相比官方的cartpole例程,1024个agent相比是要慢非常多的。这其中是什么原因我也不知道,速度慢了差不多30倍。
但是尽管如此,omni Isaac gym的并行强化学习还是非常强,仅仅需要1分钟就把任务学会了。
另外我也对比了只是用1个agent的效果:
首先训练速度并没有快很多,1分钟1600步左右,其次这个训练结果跟并行训练比确实差很多。
32个agent在1000回合左右reward就已经上去了,并且有智能体已经能够陆续完成任务。但是只有一个agent的时候,甚至训练到了 5000步都还没有一次成功,更别说reward上去了。

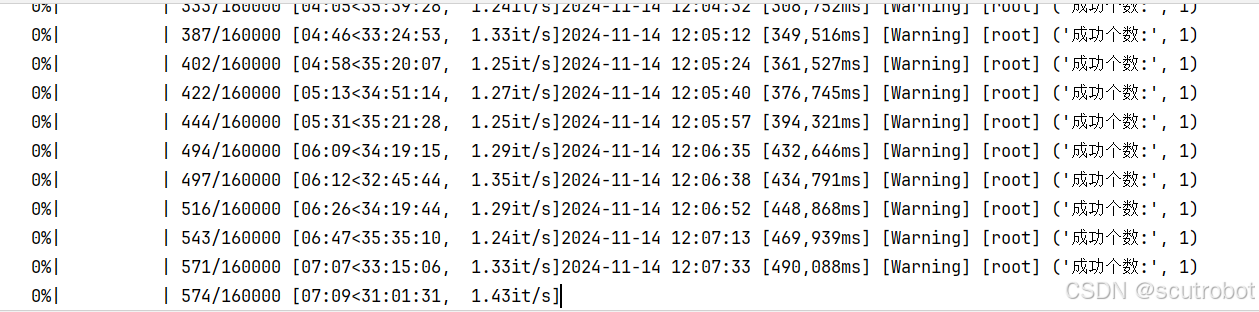
然后,可以测试下把机器人的数量加到512是个什么情况,把机器人加到512后,软件启动有了明显的卡顿,等了1分钟界面才显示出来。
 并且训练速度也是一言难尽,1分钟左右才100个回合。
并且训练速度也是一言难尽,1分钟左右才100个回合。

 综上而言,OMNI isaac gym在并行训练上确实是有很强大的效果,并且效率提升很大。但是在自己编写环境时,速度远远不及官方的例程好,甚至会有点卡顿。
综上而言,OMNI isaac gym在并行训练上确实是有很强大的效果,并且效率提升很大。但是在自己编写环境时,速度远远不及官方的例程好,甚至会有点卡顿。
结果分析
这里我分析可能存在的问题:
1. 机器人模型是多关节的,而cartpole只是2关节的,关节数会对仿真速度造成影响。
2.尽管OMNI ISAAC GYM环境给你并行出来很多个机器人,但是你在做数据处理的时候,也非常考验你的编程能力。例如这里我没有使用官方的控制库rmpflow,而是选择了自己求解IK,我写的是for循环求解IK,那么每多一个机器人,就会多求一次ik,这里就会造成大量的时间消耗。目前我还没有找到可以批量求IK的库。此外不单是IK,如果涉及到图像处理,例如想使用opencv做一些边缘提取的话,那么这种for循环更是灾难。
3.但尽管如此,看到只有1个机器人的时候,运行速度也远不如官方给的carpole例程
运行体验与建议
1. Isaac sim实际上nvida很早就推出了,近些年也一直有在更新。但每次更新出来bug都很多,并且每次版本迭代API变化都很大。并行仿真环境一开始先是isaac gym,然后到了omni isaac gym,接着又是orbit。现在4.0之后,前面三个版本直接弃用,全部移植到isaac lab里面。需要仔细移植。
2. Isaac sim的优势在于视觉的仿真,正如官方给出的demo,视觉的仿真可以做到非常的逼真,这对于做视觉操作任务的研究无疑是非常好的,特别是在做视觉的sim2real以及数据合成这一块。但是力传感器的仿真一直存在问题,不知道4.0会不会好一些。
希望这些建议能帮助 NVIDIA 不断完善 Isaac Sim,使其成为更加优秀的仿真平台。
相关文章:
Isaac Sim+SKRL机器人并行强化学习
目录 Isaac Sim介绍 OmniIssacGymEnvs安装 SKRL安装与测试 基于UR5的机械臂Reach强化学习测评 机器人控制 OMNI GYM环境编写 SKRL运行文件 训练结果与速度对比 结果分析 运行体验与建议 Isaac Sim介绍 Isaac Sim是英伟达出的一款机器人仿真平台,适用于做机…...
项目中用户数据获取遇到bug
项目跟练的时候 Uncaught (in promise) TypeError: Cannot read properties of undefined (reading ‘code’) at Proxy.userInfo (user.ts:57:17) 因此我想要用result接受信息的时候会出错,报错显示为result.code没有该值 导致我无法获取到相应的数据 解决如下 给…...

SpringSecurity+jwt+captcha登录认证授权总结
SpringSecurityjwtcaptcha登录认证授权总结 版本信息: springboot 3.2.0、springSecurity 6.2.0、mybatis-plus 3.5.5 认证授权思路和流程: 未携带token,访问登录接口: 1、用户登录携带账号密码 2、请求到达自定义Filter&am…...
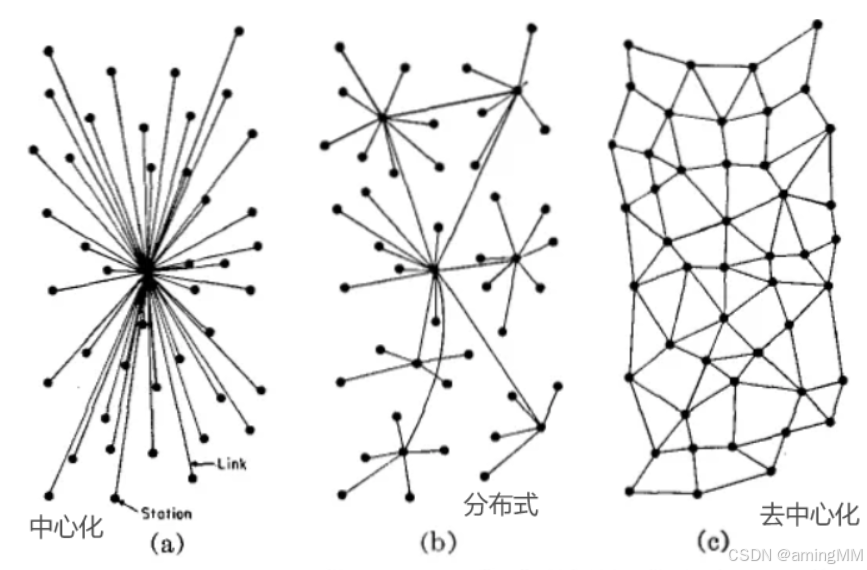
项目技术栈-解决方案-web3去中心化
web3去中心化 Web3 DApp区块链:钱包:智能合约:UI:ETH系开发技能树DeFi应用 去中心化金融P2P 去中心化网络参考Web3 DApp 区块链: 以以太坊(Ethereum)为主流,也包括Solana、Aptos等其他非EVM链。 区块链本身是软件,需要运行在一系列节点上,这些节点组成P2P网络或者半…...
【AI声音克隆整合包及教程】第二代GPT-SoVITS V2:创新与应用
一、引言 随着科技的迅猛发展,声音克隆技术已经成为一个炙手可热的研究领域。SoVITS(Sound Voice Intelligent Transfer System),作为该领域的先锋,凭借其卓越的性能和广泛的适用性,正在为多个行业带来前所…...

分清数据链路层、网络层、传输层的区别,以及这些层面的代表协议
目录 数据链路层 网络层 传输层 数据链路层 OSI模型的第二层,负责在相邻节点之间传输帧,处理帧的封装、地址、差错控制和流量控制等。确保数据在物理介质上可靠地传输,并为上层协议提供服务。 以太网(Ethernet)&…...

git没有识别出大写字母改成小写重命名的文件目录
Git 默认不会跟踪大写字母和小写字母的区别,因为在大多数文件系统中,大写字母和小写字母被认为是相同的文件,只有在区分大小写的文件系统中(如 macOS 的 HFS 或 Windows 的 NTFS),这才是一个问题。 如果重命…...
自己动手写Qt Creator插件
文章目录 前言一、环境准备1.先看自己的Qt Creator IDE的版本2.下载源码 二、使用步骤1.参考原本的插件2.编写自定义插件1.cmakelist增加一个模块2.同理,qbs文件也增加一个3.插件源码 三、效果总结 前言 就目前而言,Qt Creator这个IDE,插件比…...

数据重塑:长宽数据转换【基于tidyr】
在数据分析和可视化过程中,数据的组织形式直接影响着我们能够进行的分析类型和可视化效果。这里简单介绍两种常见的数据格式:长格式(Long Format)和宽格式(Wide Format),以及如何使用tidyr包进行…...

多模态大模型开启AI社交新纪元,Soul App创始人张璐团队亮相2024 GITEX GLOBAL
随着AI在全球范围内的加速发展和广泛应用,各行业纷纷在此领域发力。作为全球最大的科技盛会之一,2024年的GITEX GLOBAL将目光再次聚焦于人工智能的飞速发展,吸引了超过6700家来自各个领域的企业参与。在这样的背景下,Soul App作为国内较早将AI技术应用于社交领域的平台,首次亮相…...
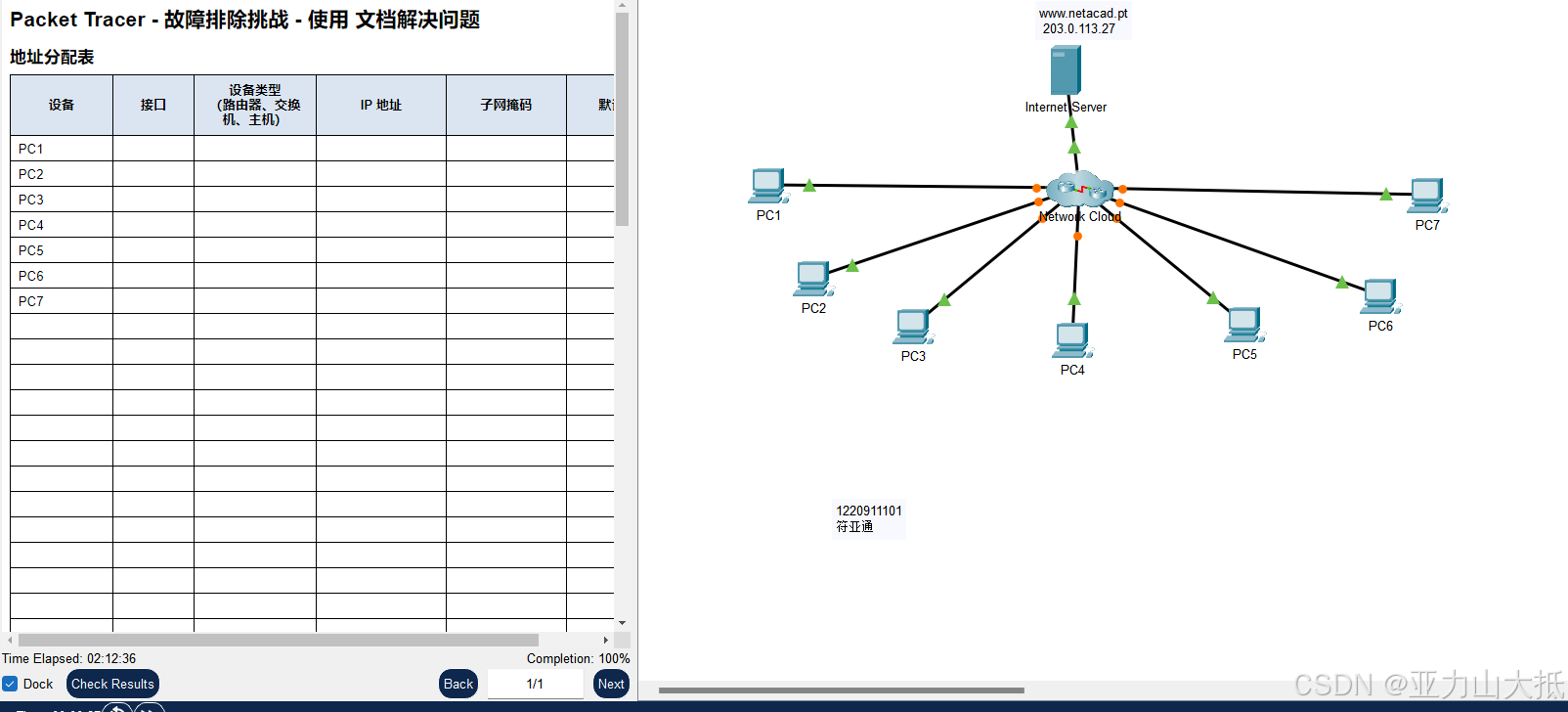
实验6记录网络与故障排除
实验6记录网络与故障排除 实验目的及要求: 通过实验,掌握如何利用文档记录网络设备相关信息并完成网络拓扑结构的绘制。能够使用各种技术和工具来找出连通性问题,使用文档来指导故障排除工作,确定具体的网络问题,实施…...

QEMU 模拟器中运行的 Linux 系统
这两个文件通常用于在 QEMU 模拟器中运行的 Linux 系统,具体作用如下: 1. linux-aarch64-qemu.ext4: - **文件类型**:这是一个文件系统镜像文件,通常是 ext4 文件系统格式。 - **作用**:它包含了 Li…...
的状态说明)
Ceph PG(归置组)的状态说明
Ceph PG(Placement Group)的状态反映了Ceph集群中数据的健康状况和分布情况。以下是Ceph PG的一些常见状态: Creating:创建状态。在创建存储池时,会创建指定数量的归置组(PG)。Ceph在创建一或多…...

Docker使用docker-compose一键部署nacos、Mysql、redis
下面是一个简单的例子,展示如何通过Docker Compose文件部署Nacos、MySQL和Redis。请确保您的机器上已经安装了Docker和Docker Compose。 1,准备好mysql、redis、nacos镜像 sudo docker pull mysql:8 && sudo docker pull redis:7.2 &&…...

HTTP常见的状态码有哪些,都代表什么意思
HTTP 协议定义了一系列的状态码,用于描述服务器对客户端请求的处理结果。这些状态码分为五个类别,每个类别都有特定的用途。 常见状态码 1开头 信息性状态码 这些状态码表示请求已被接收,继续处理。 100 Continue:客户端应继续…...
)
WebKit的Windows接口(适用2024年11月份版)
WebKit的Windows接口 使用cairo作为图形后端,libcurl作为网络后端。并且它只支持64位的Windows。 安装开发工具 安装带有“使用c进行桌面开发”工作负载的最新Visual Studio。 Activate Developer Mode.激活开发者模式。Build-webkit脚本创建一个指向生成的comp…...

Android 最新的AndroidStudio引入依赖失败如何解决?如:Failed to resolve:xxxx
错误信息: 在引入依赖时报错:Failed to resolve: xxx.xxxx:1.1.0 解决方案: 需要修改maven库的代理,否则就需要翻墙编译 新的AndroidStudio版本比较坑,修改代理的位置发生了变化: 最新变化:…...

ue5 蓝图学习(一)结构体的使用
在内容浏览器中右键 蓝图-选择结构体 下面这东西就是结构体,和C的结构体差不多 双击一下 可以添加变量,设置变量的类型和默认值。 可以在关卡蓝图中调用它。 点击打开关卡蓝图,添加变量 在变量的右侧,变量类型里搜索strcut&#…...

docker--工作目录迁移
前言 安装docker,默认的情况容器的默认存储路径会存储系统盘的 /var/lib/docker 目录下,系统盘一般默认 50G,容器输出的所有的日志,文件,镜像,都会存在这个地方,时间久了就会占满系统盘。 一、…...

Golang | Leetcode Golang题解之第556题下一个更大元素III
题目: 题解: func nextGreaterElement(n int) int {x, cnt : n, 1for ; x > 10 && x/10%10 > x%10; x / 10 {cnt}x / 10if x 0 {return -1}targetDigit : x % 10x2, cnt2 : n, 0for ; x2%10 < targetDigit; x2 / 10 {cnt2}x x2%10 -…...

折叠Cascode运放设计避坑指南:从90dB增益掉到60dB?可能是这5个细节没做好
折叠Cascode运放设计避坑指南:从90dB增益掉到60dB?可能是这5个细节没做好 在模拟IC设计的深水区,折叠Cascode运算放大器就像一位优雅的芭蕾舞者——看似轻盈的架构下隐藏着对每个技术细节的极致把控。当您精心设计的电路从仿真器中吐出60dB增…...

PDF怎么另存为JPG?5款工具2026年实测对比,电脑和手机都能用
想要把PDF文件转换成图片格式?无论是为了方便分享、减小文件大小,还是为了在不同平台使用,PDF转JPG都是一个常见需求。这篇文章就为你详细介绍PDF另存为JPG的多种方法,涵盖电脑和手机两大场景,让你快速找到最适合自己的…...

UML类图实战:从设计到代码的精准映射
1. 为什么需要从UML类图到代码的精准映射? 第一次接触UML类图时,我总觉得它像是一张"纸上谈兵"的设计稿。直到在实际项目中踩过几次坑才明白,类图与代码之间的精准映射能力,是区分普通程序员和架构师的关键技能之一。 …...

喜马拉雅音频下载神器:告别网络限制,随时随地畅听付费内容
喜马拉雅音频下载神器:告别网络限制,随时随地畅听付费内容 【免费下载链接】xmly-downloader-qt5 喜马拉雅FM专辑下载器. 支持VIP与付费专辑. 使用GoQt5编写(Not Qt Binding). 项目地址: https://gitcode.com/gh_mirrors/xm/xmly-downloader-qt5 …...

AMD Ryzen嵌入式COM Express模块:工业边缘计算的高性能解决方案
1. 项目概述:当工业计算遇上“锐龙”芯在工业自动化、边缘计算和高端嵌入式领域,COM Express(Computer-On-Module Express)模块一直是构建紧凑、高性能、高可靠性系统的基石。它就像一台浓缩的、标准化的“电脑主板核心”…...

地平线6地图有哪些 地平线6可以在手机上玩吗
很多玩家都在关注地平线6地图的细节,想知道这款即将上线的竞速大作究竟有哪些可探索的场景,而地平线6地图的丰富度也直接决定了游戏的可玩性。不少玩家习惯用手机碎片时间想体验游戏,却受设备限制无法解锁地平线6地图的全部风光,这…...

R型变压器与稳压电源:解决电压不稳跳闸,保障电器安全
1. 项目概述:从频繁跳闸到电压稳定的核心诉求如果你住在农村、城乡结合部,或者一些老旧小区,家里电器一多,或者一到用电高峰,空气开关就“啪”一声跳闸,这种烦恼我太懂了。以前我老家也这样,夏天…...

异常处理与性能调优:熬夜、加班与医美术后的“内服架构”实战指南
在互联网与高科技行业,系统的稳定运行往往伴随着开发者的极度透支。作为常年面对高并发需求和深夜发版的“IT 民工”或高压职场人,我们经常会遇到这样的尴尬场景:连续两周的 996 之后,面对电脑屏幕黑屏时的倒影,发现自…...

HNU 计算机系统 bomblab:从GDB断点到链表重构的逆向实战
1. 逆向工程实战:从零开始拆解二进制炸弹 第一次接触bomblab时,我盯着终端里那个名为"bomb"的可执行文件发呆了十分钟。这个看似普通的Linux程序就像个黑盒子,里面藏着六个需要密码才能解除的"炸弹"。作为计算机系统课程…...

告别CV大法:用MyBatisX插件5分钟搞定MyBatis Plus全套基础代码
告别重复劳动:MyBatisX插件在MyBatis Plus项目中的高效实践 每次启动新项目时,面对数十张数据库表和数百个字段,你是否也厌倦了手动编写那些格式固定的实体类、Mapper接口和Service层代码?在团队协作中,这种重复劳动不…...