相机光学(四十四)——ALL-PD和PDAF
1.PDAF(Phase Detection Auto Focus)
PDAF是相位检测自动对焦技术的缩写,它是一种在数码相机和智能手机摄像头中使用的自动对焦技术。
PDAF的原理是根据CIS(CMOS图像传感器)不同像素的相位差信息,判断出当前镜头位置相对于焦清晰状态的位置,从而得到镜头应该移动的向量。
PDAF技术通过在感光芯片上预留一些规律性对称的遮蔽像素点来进行相位检测,通过像素之间的距离及变化来决定对焦的偏移量即相位差(PD值),从而实现快速对焦。
PDAF系统框图和分类包括单PD(shielded pixel)和双PD(Dual Pixel)技术。单PD技术中,屏蔽掉像素一半的感光区域以获得一半信号,需要另外的像素屏蔽掉另一半信号,得到完整的相位差信息。双PD技术使用两个光电二极管放在一个像素井内,分别读取两个二极管内的信息,从而实现对焦。
PDAF的优点包括对焦速度快,暗光对焦能力强,不需要额外相位对焦像素,画质表现接近反差对焦传感器,并且可以生成深度图供景深处理。
PDAF的缺点包括在全像素采样视频模式下不能相位对焦。
2.ALL-PD
索尼的ALL-PD技术是指索尼半导体解决方案公司开发的全像素自动对焦(AF)技术。这项技术允许图像传感器上的所有成像像素同时也用作相位差检测像素,从而大幅提升了对焦的密度和稳定性,即使在难以对焦的场景下也能实现稳定的自动对焦。以下是ALL-PD技术的几个关键特点:
全像素双核对焦(Dual PD):这是ALL-PD技术的基础方式,通过将两个相邻的光电二极管(PD)组成一个像素,共享一个片上镜头(OCL),从而能够检测相位差。这种技术允许全像素参与成像和对焦,同时消除相位差检测对图像质量的影响。
2x2 OCL方法:这种方法基于Quad Bayer传感器,其中四个同色像素共享一个OCL。这种方法结合了Quad Bayer的功能和全像素AF的优点,而且不需要将两个PD的信号合并用于图像信号,因此更容易实现高分辨率,适合于中型传感器。
Octa PD方法:这是一种结合了Quad Bayer排列和Dual PD的技术。它保留了Quad Bayer排列的特点,如高感光度和HDR兼容性,同时通过全像素AF功能实现了出色的自动对焦性能,特别适合大型传感器。Octa PD的一个独特特点是在HDR模式下,所有像素在三个曝光级别(长、中、短)上都能检测相位差,从而实现即使在低亮度目标上也能快速自动对焦。
ALL-PD技术通过这些方法提供了多种实现全像素自动对焦的方式,适用于不同类型的图像传感器,从而满足不同场景下的对焦需求。这种技术的发展和应用,使得索尼在图像传感器领域保持了领先地位,并为用户提供了更快速、更准确的对焦体验。
3.主要区别
ALL-PD技术允许图像传感器上的所有成像像素同时也用作相位差检测像素,这意味着整个传感器表面都能用于自动对焦,从而大幅提升了对焦的密度和稳定性;PDAF技术通常只使用图像传感器上的一部分像素作为相位差检测像素,因此对焦性能受到相位差检测像素分布密度的限制。
ALL-PD技术通过增加相位差信息的获取密度,实现了在以往难以对焦的场景中的稳定自动对焦,包括在暗环境中也能稳定对焦,因为收集了大量的相位差信息。PDAF技术虽然也能实现快速对焦,但在暗光环境下的表现可能不如ALL-PD技术,因为它依赖于有限的相位差检测像素。
ALL-PD技术在使用图像信号时不需要插补处理,因此不会导致画质下降。PDAF技术在拍摄时需要对相位差检测像素的位置进行图像信息插补,如果相位差检测像素过多,可能会导致插补困难和画质下降。
索尼半导体解决方案公司开发并提供了多种实现ALL-PD的方式,包括Dual PD方式、2 x 2 OCL方式和Octa PD方式,以适应不同类型和尺寸的图像传感器。PDAF技术通常采用特定的相位差检测像素,这些像素是一些特殊的像素,它们只允许特定方向的光通过,通过比较左右PD pixel形成的两张图像,PDAF算法会估算出当前镜头的离焦位置。
emsp; 总结来说,ALL-PD技术是索尼开发的一种全像素自动对焦技术,它通过使用所有成像像素作为相位差检测像素,提供了更高的对焦密度和稳定性,尤其在暗光环境下表现更优,并且不会因相位差检测而降低图像质量。而PDAF技术则是一种更传统的相位差检测自动对焦技术,它使用部分像素进行相位差检测,虽然也能实现快速对焦,但在某些方面如暗光环境和图像质量上可能不如ALL-PD技术。
相关文章:
——ALL-PD和PDAF)
相机光学(四十四)——ALL-PD和PDAF
1.PDAF(Phase Detection Auto Focus) PDAF是相位检测自动对焦技术的缩写,它是一种在数码相机和智能手机摄像头中使用的自动对焦技术。 PDAF的原理是根据CIS(CMOS图像传感器)不同像素的相位差信息,判断出…...

Opengl光照测试
代码 #include "Model.h" #include "shader_m.h" #include "imgui.h" #include "imgui_impl_glfw.h" #include "imgui_impl_opengl3.h" //以上是放在同目录的头文件#include <glad/glad.h> #include <GLFW/glfw3.…...

OpenSIP2.4.11 向 FreeSWITCH 注册
应朋友要求做了个简单的测试,花费时间不过半小时,记录如下: OpenSIPS IP 地址:192.168.31.213 FreeSWITCH IP 地址:192.168.31.166 加载 uac_registrant 模块(这个模块依赖 uac_auth 模块,得…...

【C++】深入理解 C++ 优先级队列、容器适配器与 deque:实现与应用解析
个人主页: 起名字真南的CSDN博客 个人专栏: 【数据结构初阶】 📘 基础数据结构【C语言】 💻 C语言编程技巧【C】 🚀 进阶C【OJ题解】 📝 题解精讲 目录 前言📌 1. 优先级队列、容器适配器和 deque 概述✨1.1 什么是优…...

Android 开发与救砖工具介绍
Android 开发与救砖工具介绍 在 Android 开发和设备维护中,fastboot、adb 和 9008 模式是三个非常重要的工具和模式。它们各自有不同的用途和操作方式,对于开发者和技术支持人员来说,了解它们的功能和使用方法是必不可少的。 1. Fastboot …...

vue2和vue3:diff算法的区别?
Vue 2 和 Vue 3 在 diff 算法方面的主要区别是: Vue 2 使用普通的 diff 算法,它会遍历所有的节点进行比对。 Vue 3 引入了 patch flag 的概念,并且对 diff 算法进行了优化,比如在相同层级的节点间不会去递归比对已经被移除的节点…...

后端返回大数问题
这个问题并不难,但是在开发的时候没有注意到 后端返回了一个列表数据,包含id,这个id是一个大数,列表进入详情,需要将id传入到详情页面详情页面内部通过id获取数据一直404,id不正确找问题,从路由传参到请求数据发现id没有问题,然后和后端进行联调,发现后端返回的id和我获取的id…...

vue3: ref, reactive, readonly, shallowReactive
vue3: ref, reactive, readonly, shallowReactive 原文地址:https://mp.weixin.qq.com/s/S3jPZKEMBP8nQQObF5d2VA <template><!-- <ul><li v-for"item in list.arr">{{item}}</li></ul><button click.prevent"add"…...
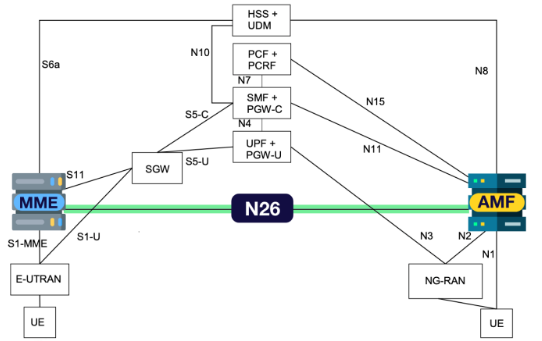
5G与4G互通的桥梁:N26接口
5G的商用部署进程将是一个基于4G系统进行的长期的替换、升级、迭代的过程,4G系统是在过渡到5G全覆盖过程中,作为保障用户业务连续性体验这一目的的最好补充。 因此4G/5G融合组网,以及互操作技术将是各大运营商在网络演进中需要重点考虑的问题…...

29-Elasticsearch 集群监控
Elasticsearch Stats 相关的 API ● Elasticsearch 提供了多个监控相关的 API ○ Node Stats: _nodes/stats ○ Cluster Stats: _cluster/stats ○ Index Stats: index_name/_stats Elasticsearch Task API ● 查看 Task 相关的 API ○ Pending Cluster Tasks…...

利用Excel批量生成含二维码的设备管理标签卡片
在日常办公中,批量制作标签是常见且繁琐的任务,尤其当这些标签需要包含大量数据并附带二维码以便快速扫描识别时,难度更是成倍增加。尽管传统的Word邮件合并功能在数据插入方面表现出色,但在二维码生成上却显得有些捉襟见肘。 为…...

小米运动健康与华为运动健康在苹手机ios系统中无法识别蓝牙状态 (如何在ios系统中开启 蓝牙 相册 定位 通知 相机等功能权限,保你有用)
小米运动健康与华为运动健康在苹手机ios系统中无法识别蓝牙状态 (解决方案在最下面,参考蓝牙权限设置方式举一反三开启其它模块的权限) 最近买了一台小米手表s4,但是苹手机ios系统中的 “小米运动健康” app 始终无法识别我手机…...

高亮变色显示文本中的关键字
效果 第一步:按如下所示代码创建一个用来高亮显示文本的工具类: public class KeywordUtil {/*** 单个关键字高亮变色* param color 变化的色值* param text 文字* param keyword 文字中的关键字* return*/public static SpannableString highLigh…...

Javascript垃圾回收机制-运行机制(大厂内部培训版本)
前言 计算机基本组成: 我们编写的软件首先读取到内存,用于提供给 CPU 进行运算处理。 内存的读取和释放,决定了程序性能。 冯诺依曼结构 解释和编译 这两个概念怎么理解呢。 编译相当于事先已经完成了可以直接用。好比去饭店吃饭点完上…...

【jvm】一个空Object对象的占多大空间
目录 1. 说明2. 结论 1. 说明 1.在Java中,一个空Object对象所占用的内存空间大小会受到JVM(Java虚拟机)实现和配置的影响,具体数值可能因不同JVM版本和配置而有所不同。2.但一般来说,可以基于一些通用的原则来估算这个…...

241114.学习日志——[CSDIY] [CS]数据结构与算法 [00]
CSDIY:这是一个非科班学生的努力之路,从今天开始这个系列会长期更新,(最好做到日更),我会慢慢把自己目前对CS的努力逐一上传,帮助那些和我一样有着梦想的玩家取得胜利!!&…...

The Planets: Earth -- 练习
环境搭建 该靶场环境来自Vulnhub -------- Difficulty: Easy 靶机与Kali的IP地址只需要在同一局域网即可(同一个网段,即两虚拟机处于同一网络模式),所以需要调整KALI和靶场的网络模式,为了方便测试本地采用NAT模式。 注意&…...
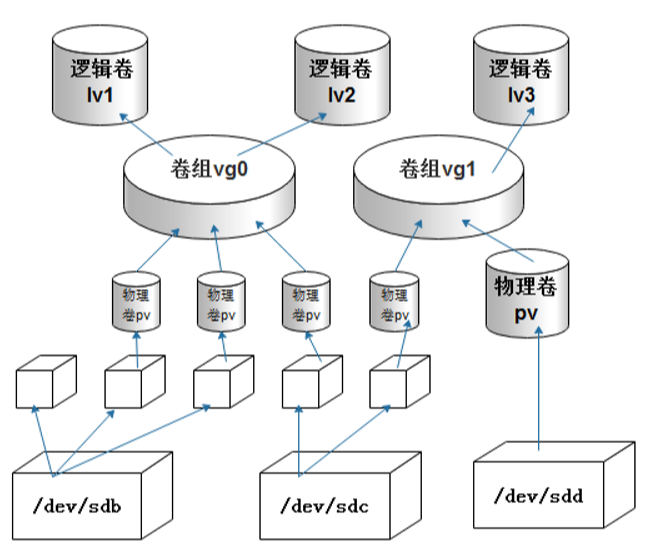
linux逻辑卷练习
目录 知识点: 常用命令 题目: 解题: 1)分区 2)创建物理卷 3)创建卷组 4)生成逻辑卷 "要带参数 -n" 5)扩容 6)格式化(添加文件系统) 7)挂…...

openai 论文Scaling Laws for Neural Language Models学习
2001.08361 (arxiv.org) 论文研究语言模型在交叉熵损失下的性能经验缩放定律:模型损失(性能)随模型大小、数据集大小和用于训练的计算量呈现缩放为幂律的关系,有些趋势跨越超过 7 个数量级。其他模型架构细节 (如网络…...

__VUE_PROD_HYDRATION_MISMATCH_DETAILS__ is not explicitly defined
VUE_PROD_HYDRATION_MISMATCH_DETAILS 未明确定义。您正在运行 Vue 的 esm-bundler 构建,它期望这些编译时功能标志通过捆绑器配置全局注入,以便在生产捆绑包中获得更好的tree-shaking优化。 Vue.js应用程序正在使用ESM(ECMAScript模块&#…...

Chat-with-NeRF:三维场景重建与对话式AI的融合实践
1. 项目概述:当NeRF遇见对话式AI最近在三维视觉和AIGC的交叉领域,一个名为“chat-with-nerf”的项目引起了我的注意。简单来说,它实现了一个听起来很科幻的功能:你上传一张或多张照片,系统会基于这些照片重建出一个三维…...

LaTeX列表排版避坑指南:用enumitem包轻松解决编号重置、缩进和对齐问题
LaTeX列表排版避坑指南:用enumitem包轻松解决编号重置、缩进和对齐问题 在撰写学术论文、技术文档或法律条款时,列表结构是组织内容的重要工具。但LaTeX默认的列表环境往往让用户陷入编号混乱、缩进不一致的泥潭。本文将深入剖析这些痛点的根源ÿ…...

一键封装成EXE!让Windows命令行像Linux一样直接敲‘binwalk’的懒人方案
一键封装成EXE!让Windows命令行像Linux一样直接敲‘binwalk’的懒人方案 每次打开命令行都要先cd到Python的Scripts目录才能使用binwalk,这种操作对于效率至上的开发者来说简直是时间杀手。本文将带你用PyInstaller打造一个开箱即用的binwalk.exe&#…...

在Node.js后端服务中集成Taotoken实现稳定且低成本的大模型能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Node.js后端服务中集成Taotoken实现稳定且低成本的大模型能力 对于需要在产品中集成智能对话功能的中小型团队而言,直…...

Win11Debloat:一键打造纯净高效的Windows 11终极优化指南
Win11Debloat:一键打造纯净高效的Windows 11终极优化指南 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter and…...

Atmosphere 1.7.1:基于安全监控器的任天堂Switch微内核架构深度解析
Atmosphere 1.7.1:基于安全监控器的任天堂Switch微内核架构深度解析 【免费下载链接】Atmosphere-stable 大气层整合包系统稳定版 项目地址: https://gitcode.com/gh_mirrors/at/Atmosphere-stable Atmosphere 1.7.1是一个针对任天堂Switch游戏主机的完整自定…...

如何快速掌握MTKClient:从零开始的联发科设备救砖与调试完整指南
如何快速掌握MTKClient:从零开始的联发科设备救砖与调试完整指南 【免费下载链接】mtkclient MTK reverse engineering and flash tool 项目地址: https://gitcode.com/gh_mirrors/mt/mtkclient 你是否曾经面对变砖的联发科手机束手无策?是否因为…...

CoaXPress 2.0多输入高速图像采集卡:应对机器视觉数据洪流的架构核心
1. 项目概述:当视觉系统遇上数据洪流在工业检测、半导体AOI、生命科学成像这些对速度和精度要求近乎苛刻的领域,图像采集卡扮演着“数据咽喉”的角色。它决定了视觉系统能从相机“吞下”多少数据,以及“消化”的速度有多快。最近,…...

观察 Taotoken 在多地域请求下的延迟与稳定性表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察 Taotoken 在多地域请求下的延迟与稳定性表现 对于依赖大模型 API 进行开发的团队而言,服务的延迟与稳定性是影响开…...
)
别再乱装CUDA了!用Anaconda为你的3060 Ti一键搞定PyTorch GPU环境(含CUDA 11.3实战)
3060 Ti显卡玩家的PyTorch环境配置指南:用Anaconda避开CUDA版本地狱 在深度学习领域,GPU加速已经成为提升模型训练效率的标配。然而,对于许多刚入门的开发者来说,配置PyTorch的GPU支持往往成为第一道门槛——尤其是当涉及到CUDA版…...