【STM32】MPU6050初始化常用寄存器说明及示例代码
一、MPU6050常用配置寄存器
1、电源管理寄存器1( PWR_MGMT_1 ) 此寄存器允许用户配置电源模式和时钟源。
此寄存器允许用户配置电源模式和时钟源。
DEVICE_RESET :用于控制复位的比特位。设置为1时复位 MPU6050,内部寄存器恢复为默认值,复位结束后MPU硬件自动清零该位。
SLEEP:用于控制 MPU6050 工作模式的比特位。MPU6050复位后该位置 1,即进入了低功耗睡眠模式。因此,设备上电复位后,我们要将该比特位置0以进入正常工作模式。
TEMP_DIS:用于设置是否使能温度传感器的比特位。将该位置为0则使能温度传感器。
CLKSEL[2:0]:用于设置系统时钟源的比特位。可选择使用内部8MHz晶振、外部晶振或陀螺仪时钟作为时钟源。 设备上电默认是使用内部 8M的RC晶振,但因其精度不高,官方推荐使用陀螺锁相环或者外部时间作为时钟源,以提高稳定性。一般设置 CLKSEL=001 即可。时钟源可根据下表进行选择:
//示例代码
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050,设置电源管理寄存器 1(0X6B)的bit7 为 1
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050,设置电源管理寄存器 1(0X6B)为 0X00
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考, 设置电源管理寄存器 1(0X1B)bit2、bit1、bit0 为 0012、陀螺仪配置寄存器( GYRO_CONFIG )

此寄存器用于触发陀螺仪自检,并配置陀螺仪的满量程范围。
我们重点关注FS_SEL[1:0]这两个位,它用于设置陀螺仪的满量程范围,一般设置为 3,即±2000°/S,因为陀螺仪的 ADC 为 16 位分辨率,所以得到灵敏度为:65536/4000=16.4LSB/(°/S)。
//示例代码
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps, 设置陀螺仪配置寄存器(0X1B)bit4、bit3 为 3
3、加速度传感器配置寄存器( ACCEL_CONFIG )

此寄存器用于触发加速度计的自检,并配置加速度计的满量程范围,还可配置了数字高通滤波器(DHPF)。
我们重点关注AFS_SEL[1:0]这两个位,用于设置加速度传感器的满量程范围,一般设置为 0,即±2g,因为加速度传感器的ADC 也是 16 位,所以得到灵敏度为:65536/4=16384LSB/g。
//示例代码
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g , 设置加速度传感器配置寄存器(0X1C)bit4、bit3 为 0
4、FIFO 使能寄存器( FIFO_EN )
此寄存器用于控制 FIFO 使能,确定将哪些传感器测量值加载到FIFO缓冲区中。如果传感器各自的FIFO_EN位在该寄存器中被设置为1,则存储在传感器数据寄存器(寄存器59至96)内的数据将被加载到FIFO缓冲器中。这些传感器按照寄存器25中定义的采样速率进行采样。
实际应用中,在简单读取传感器数据的时候,可以不用 FIFO,设置对应位为 0 即可禁止 FIFO,设置为 1 则使能 FIFO。加速度传感器的 3 个轴,全由 1个位(ACCEL_FIFO_EN)控制,只要该位置 1,则加速度传感器的三个通道都开启 FIFO了。
5、陀螺仪采样率分频寄存器( SMPRT_DIV ) 该寄存器用于设置 MPU6050 的陀螺仪采样频率,计算公式为:
该寄存器用于设置 MPU6050 的陀螺仪采样频率,计算公式为:
采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)
陀螺仪的输出频率,是 1Khz 或者 8Khz,与数字低通滤波器(DLPF)的设置有关:当 DLPF_CFG=0/7 的时候,频率为 8Khz,其他情况是 1Khz。 一般情况下,DLPF 滤波带宽设置为采样率的 1/2 。
采样率,我们假定设置为 50Hz,那么采样分频器值 SMPLRT_DIV = 1000/50-1 = 19。
注意:加速度计的输出速率为1 kHz。这意味着,对于大于1 kHz的采样率,相同的加速度计采样数据可以不止一次地输出到FIFO、DMP和传感器寄存器。
6、配置寄存器( CONFIG )
对于这个寄存器,我们主要关注DLPF_CFG[2:0],即数字低通滤波器(DLPF)的设置位,加速度计和陀螺仪都是根据这三个比特位的配置进行过滤的。DLPF_CFG[2:0] 不同配置对应的过滤情况如下表所示:
加速度传感器的输出速率(Fs)固定是 1Khz,而陀螺仪传感器的输出速率(Fs)根据 DLPF_CFG 的配置有所不同。一般我们设置陀螺仪传感器的带宽为其采样率的一半,如前面所说的,如果设置采样率为 50Hz,那么带宽就应该设置为 25Hz,取近似值 20Hz,就应该设置 DLPF_CFG = 4 (二进制 100)。
7、电源管理寄存器2( PWR_MGMT_2 )
此寄存器允许用户在仅加速计低功率模式下配置唤醒频率。这个寄存器还允许用户将加速度计和陀螺仪的各个轴进入待机模式。一般情况下配置为 0 。可根据实际情况设置,详细内容可参考寄存器手册。
8、陀螺仪数据输出寄存器(6个8位寄存器,0x43~0x48) 陀螺仪传感器数据输出寄存器由6个8位寄存器组成,分别存储X/Y/Z三个轴的陀螺仪传感器数据,高字节在前,低字节在后。
陀螺仪传感器数据输出寄存器由6个8位寄存器组成,分别存储X/Y/Z三个轴的陀螺仪传感器数据,高字节在前,低字节在后。
每个16位陀螺仪测量都有一个在FS_SEL(寄存器27)中定义的满量程。对于每个全尺度设置,陀螺仪每LSB的灵敏度如下表所示。
9、加速度传感器数据输出寄存器(6个,0x3B~0x40)
加速度传感器数据输出寄存器由6个8位寄存器组成,输出X/Y/Z三个轴的加速度传感器值,高字节在前,低字节在后。
每个16位加速度计测量都有一个在ACCEL_FS(寄存器28)中定义的完整尺度。对于每个完整的尺度设置,ACCEL_xOUT中每LSB加速度计的灵敏度如下表所示。
10、温度传感器数据输出寄存器( TEMP_OUT_H and TEMP_OUT_L )
温度换算公式为: Temperature = 36.53 + regval/340, 其中,Temperature为计算得到的温度值,单位为℃,regval为从0X41和0X42读到的温度传感器有符号值。
二、MPU6050初始化
1、初始化 IIC 接口。MPU6050 采用 I2C 与 STM32F1 通信,需要先初始化与 MPU6050 连接的 SDA和 SCL 数据线。
2、复位并唤醒 MPU6050。复位操作使 MPU6050 内部所有寄存器恢复默认值,通过对电源管理寄存器 1(0x6B)的DEVICE_RESET置 1 实现。 复位结束后,电源管理寄存器 1 恢复默认值(0x40),然后必须设置该寄存器为0x00,以唤醒 MPU6050,进入正常工作模式。
3、设置角速度传感器(陀螺仪)和加速度传感器的满量程范围。通过陀螺仪配置寄存器(0x1B)和加速度传感器配置寄存器(0x1C)设置,一般设置陀螺仪的满量程范围为±2000dps,加速度传感器的满量程范围为±2g。
4、设置其他参数。需要配置的参数还有:关闭中断、关闭 AUX IIC 接口(没有磁力计)、禁止 FIFO、设置陀螺仪采样率和设置数字低通滤波器(DLPF)等。如果不采用中断方式读取数据,则关闭中断;如果不使用 AUX IIC 接口外接其他传感器,则关闭此接口。可以分别通过中断使能寄存器(0x38)和用户控制寄存器(0x6A)控制。MPU6050 可以使用 FIFO 存储传感器数据,如果不使用则可以关闭所有 FIFO 通道,可能通过 FIFO 使能寄存器(0x23)控制,默认都置 0(即禁止 FIFO),所以用默认值就可以了。陀螺仪采样率通过采样率分频寄存器(0x19)控制。数字低通滤波器(DLPF)则通过配置寄存器(0x1A)设置,一般设置 DLPF 带宽为采样率的 1/2 。
5、配置系统时钟源并使能角速度(陀螺仪)传感器和加速度传感器。系统时钟源同样是通过电源管理寄存器 1(0x1B)来设置,该寄存器的最低三位用于设置系统时钟源选择,默认值是 0(内部 8M RC 震荡),一般设置为 1,选择 x 轴陀螺 PLL 作为时钟源,以获得更高精度的时钟。同时,使能角速度传感器和加速度传感器,这两个操作通过电源管理寄存器 2(0x6C)来设置,设置对应位为 0 即可开启。
至此,MPU6050 的初始化就基本完成了,可以正常工作了(其他未设置的寄存器全部采用默认值即可)。
三、MPU6050初始化示例代码
//部分宏定义数据
//MPU6050 AD0控制脚
#define MPU_AD0_CTRL PAout(15) //控制AD0电平,从而控制MPU地址//#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到
//#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位).
//如果接V3.3,则IIC地址为0X69(不包含最低位).
#define MPU_ADDR 0X68//初始化MPU6050
//返回值:0,成功
// 其他,错误代码
u8 MPU_Init(void)
{ u8 res;MPU_AD0_CTRL=0; //控制MPU6050的AD0脚为低电平,从机地址为:0x68MPU_IIC_Init();//初始化IIC总线MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x80); //复位MPU6050 , 设置电源管理寄存器 1(0x6B)的bit7 为 1delay_ms(100);MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x00); //唤醒MPU6050, 设置电源管理寄存器 1(0x6B)为 0X00 MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps, 设置陀螺仪配置寄存器(0x1B)bit4、bit3 为 3 MPU_Set_Accel_Fsr(0); //加速度传感器,±2g, 设置加速度传感器配置寄存器(0x1C)bit4、bit3 为 0MPU_Set_Rate(50); //设置采样率50HzMPU_Write_Byte(MPU_INT_EN_REG,0x00); //关闭所有中断MPU_Write_Byte(MPU_USER_CTRL_REG,0x00); //I2C主模式关闭MPU_Write_Byte(MPU_FIFO_EN_REG,0x00); //关闭FIFO, 设置FIFO 使能寄存器(0X23)为 0X00MPU_Write_Byte(MPU_INTBP_CFG_REG,0x80); //INT引脚低电平有效res=MPU_Read_Byte(MPU_DEVICE_ID_REG);if(res==MPU_ADDR)//器件ID正确{MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x01); //设置CLKSEL,PLL X轴为参考, 设置电源管理寄存器 1(0X1B)bit2、bit1、bit0 为 001MPU_Write_Byte(MPU_PWR_MGMT2_REG,0x00); //加速度与陀螺仪都工作, 设置电源管理寄存器2(0X6C) 为 0X00MPU_Set_Rate(50); //设置采样率为50Hz }else return 1;return 0;
}
// 以上为MPU6050初始化部分//初始化IIC
void MPU_IIC_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//先使能外设IO PORTB时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11; // 端口配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIO GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11); //PB10,PB11 输出高 }//IIC写一个字节
//reg:寄存器地址
//data:数据
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Byte(u8 reg,u8 data)
{ MPU_IIC_Start(); MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令 if(MPU_IIC_Wait_Ack()) //等待应答{MPU_IIC_Stop(); return 1; }MPU_IIC_Send_Byte(reg); //写寄存器地址MPU_IIC_Wait_Ack(); //等待应答 MPU_IIC_Send_Byte(data);//发送数据if(MPU_IIC_Wait_Ack()) //等待ACK{MPU_IIC_Stop(); return 1; } MPU_IIC_Stop(); return 0;
}//设置MPU6050陀螺仪传感器满量程范围
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Gyro_Fsr(u8 fsr)
{return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围
}//设置MPU6050加速度传感器满量程范围
//fsr:0,±2g;1,±4g;2,±8g;3,±16g
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Accel_Fsr(u8 fsr)
{return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围
}//设置MPU6050的采样率(假定陀螺仪输出频率Fs=1KHz)
//rate:4~1000(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Rate(u16 rate)
{u8 data;if(rate>1000)rate=1000;if(rate<4)rate=4;data=1000/rate-1; //由采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)得 SMPLRT_DIV= 陀螺仪输出频率 / 采样频率 - 1data=MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
u8 MPU_Read_Byte(u8 reg)
{u8 res;MPU_IIC_Start(); MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令 MPU_IIC_Wait_Ack(); //等待应答 MPU_IIC_Send_Byte(reg); //写寄存器地址MPU_IIC_Wait_Ack(); //等待应答MPU_IIC_Start();MPU_IIC_Send_Byte((MPU_ADDR<<1)|1);//发送器件地址+读命令 MPU_IIC_Wait_Ack(); //等待应答 res=MPU_IIC_Read_Byte(0);//读取数据,发送nACK MPU_IIC_Stop(); //产生一个停止条件 return res;
} 四、结语。
本文内容部分参考网络大神提供的代码,如有权利限制,请及时联系。
相关文章:
【STM32】MPU6050初始化常用寄存器说明及示例代码
一、MPU6050常用配置寄存器 1、电源管理寄存器1( PWR_MGMT_1 ) 此寄存器允许用户配置电源模式和时钟源。 DEVICE_RESET :用于控制复位的比特位。设置为1时复位 MPU6050,内部寄存器恢复为默认值,复位结束…...

深度学习中的mAP
在深度学习中,mAP是指平均精度均值(mean Average Precision),它是深度学习中评价模型好坏的一种指标(metric),特别是在目标检测中。 精确率和召回率的概念: (1).精确率(Precision):预测阳性结果中实际正确的比例(TP / …...

Redis设计与实现 学习笔记 第二十章 Lua脚本
Redis从2.6版本引入对Lua脚本的支持,通过在服务器中嵌入Lua环境,Redis客户端可以使用Lua脚本,直接在服务器端原子地执行多个Redis命令。 其中EVAL命令可以直接对输入的脚本进行求值: 而使用EVALSHA命令则可以根据脚本的SHA1校验…...

大模型(LLMs)推理篇
大模型(LLMs)推理篇 1. 为什么大模型推理时显存涨的那么多还一直占着? 首先,序列太长了,有很多Q/K/V;其次,因为是逐个预测next token,每次要缓存K/V加速解码。 大模型在gpu和cpu上…...

Leetcode 412. Fizz Buzz
Problem Given an integer n, return a string array answer (1-indexed) where: answer[i] “FizzBuzz” if i is divisible by 3 and 5.answer[i] “Fizz” if i is divisible by 3.answer[i] “Buzz” if i is divisible by 5.answer[i] i (as a string) if none of t…...

双因子认证:统一运维平台安全管理策略
01双因子认证概述 双因子认证(Two-Factor Authentication,简称2FA)是一种身份验证机制,它要求用户提供两种不同类型的证据来证明自己的身份。这通常包括用户所知道的(如密码)、用户所拥有的(如…...

CMake笔记:install(TARGETS target,...)无法安装的Debug/lib下
1. 问题描述 按如下CMake代码,无法将lib文件安装到Debug/lib或Release/lib目录下,始终安装在CMAKE_INSTALL_PREFIX/lib下。 install(TARGETS targetCONFIGURATIONS DebugLIBRARY DESTINATION Debug/lib) install(TARGETS targetCONFIGURATIONS Release…...

使用ENSP实现NAT
一、项目拓扑 二、项目实现 1.路由器AR1配置 进入系统试图 sys将路由器命名为R1 sysname R1关闭信息中心 undo info-center enable进入g0/0/0接口 int g0/0/0将g0/0/0接口IP地址配置为12.12.12.1/30 ip address 12.12.12.1 30进入e0/0/1接口 int g0/0/1将g0/0/1接口IP地址配置…...

漫步北京小程序构建智慧出行,打造旅游新业态模式
近年来,北京市气象服务中心持续加强推进旅游气象服务,将旅游气象监测预警基础设施纳入景区配套工程,提升气象和旅游融合发展水平,服务建设高品质智慧旅游强市。 天气条件往往影响着旅游景观的体验,北京万云科技有限公…...

对齐输出
对齐输出 C语言代码C 语言代码Java语言代码Python语言代码 💐The Begin💐点点关注,收藏不迷路💐 输入三个整数,按每个整数占8个字符的宽度,右对齐输出它们。 输入 只有一行,包含三个整数&…...
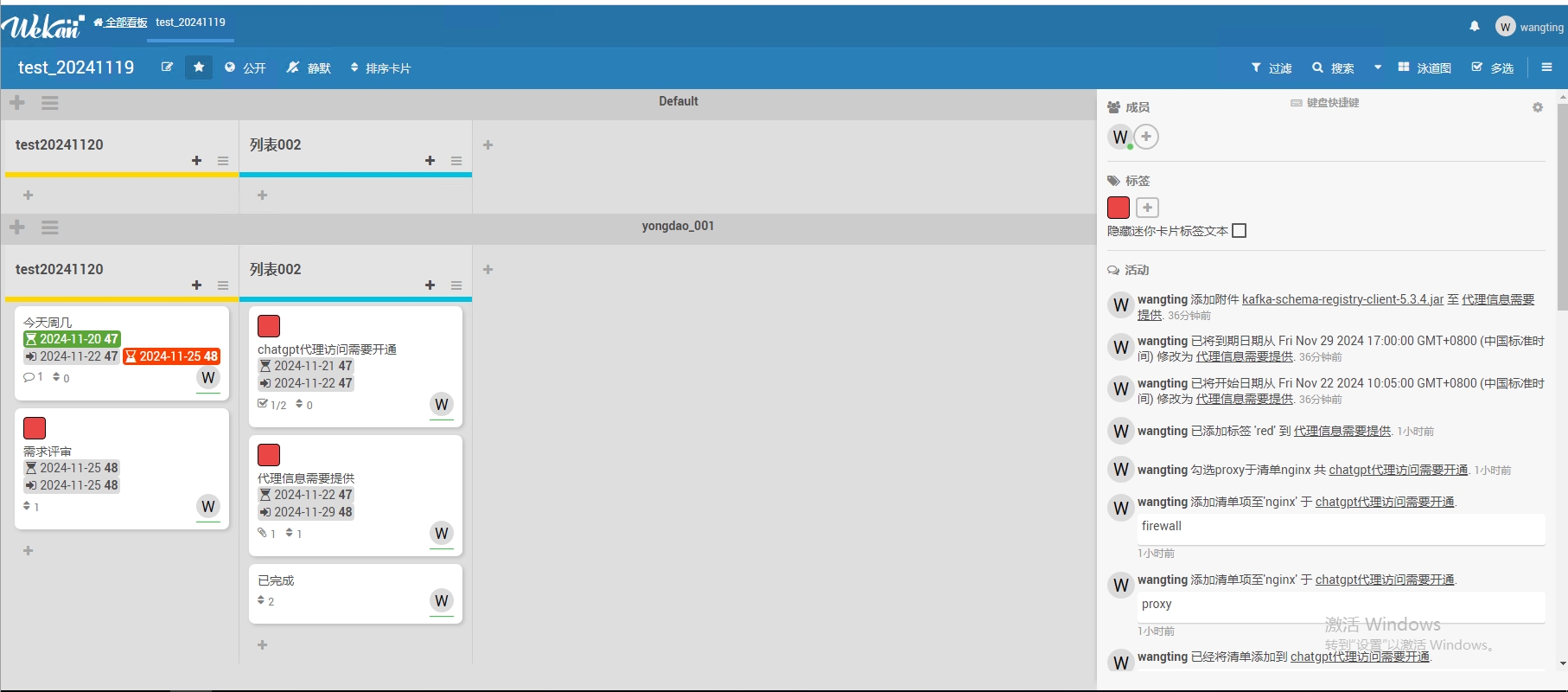
Wekan看板安装部署与使用介绍
Wekan看板安装部署与使用介绍 1. Wekan简介 Wekan 是一个开源的看板式项目管理工具,它的配置相对简单,因为大多数功能都是开箱即用的。它允许用户以卡片的形式组织和跟踪任务,非常适合敏捷开发和日常任务管理。Wekan 的核心功能包括看板…...

VisionPro 机器视觉案例 之 黑色齿轮
第十五篇 机器视觉案例 之 齿轮齿数检测 文章目录 第十五篇 机器视觉案例 之 齿轮齿数检测1.案例要求2.实现思路2.1 统计齿轮齿数使用模板匹配工具CogPMAlignTool,并从模板匹配工具的结果集中得到每一个齿的中心点。2.2 测量距离需要知道两个坐标点,一个…...

学习python的第十三天之数据类型——函数传参中的传值和传址问题
学习python的第十三天之数据类型——函数传参中的传值和传址问题 函数传参中的传值和传址问题 函数传参的机制可以理解为传值(pass-by-value)和传址(pass-by-reference)的混合体,但实际上更接近于传对象引用ÿ…...

Windows11深度学习环境配置
CUDA、CUDNN 一、安装另一个版本的CUDA 下载.exe文件,网址打不开自己开热点就能解决:CUDA Toolkit 11.2 Downloads | NVIDIA Developer 若遇到“You already have a newer version of the NVIDIA Frameview SDK installed” 1.把电脑已经存在的FrameVi…...

电销老是被标记,该如何解决!!!
在当今的商业世界中,电话销售依然是许多企业拓展业务、接触客户的重要手段。然而,电销人员常常面临一个令人头疼的问题 —— 老是被标记。 一、电销被标记的困扰 当你的电话号码被频繁标记为 “骚扰电话”“推销电话” 等,会带来一系列不良…...
MyBatis入门——基本的增删改查
目录 一、MyBatis简介 二、搭建MyBatis (一)配置依赖 (二)log4j日志功能 (三)数据库配置文件——jdbc.properties (四)创建MyBatis的核心配置文件 (五)使用MyBatisX插件 三、项目其他配置搭建 (一)创建数据库连接工具类 (二)创建表 (三)创建数据库的实体类 (四)Use…...

学习Gentoo系统中二进制软件包和源代码包的概念
Gentoo Linux 是一个以源代码包管理和高度定制化特性著称的Linux发行版。以下是关于Gentoo系统中二进制软件包和源代码包的概念、发展历程以及它们各自的优势: 二进制软件包概念及发展历程: 概念:Gentoo的二进制软件包是指预先编译好的软件包…...

麦肯锡报告 | 未来的经济引擎:解读下一代竞争领域
随着科技和商业的快速发展,一些具有高增长性和高动态性的行业正在悄然崛起,成为推动全球经济发展的新引擎。这些行业被称为“竞争领域”(Arenas)。据麦肯锡全球研究院(MGI)的研究,这些领域有望在…...

连接mysql并读取指定表单数据到DataFrame
提问 python 如何连接mysql并读取指定表单数据到DataFrame 解答 要在Python中连接MySQL并读取指定表单数据到DataFrame,你可以使用pandas库结合sqlalchemy引擎或者mysql-connector-python。这里我将展示两种方法的示例代码。 使用pandas和sqlalchemy 确保安装了…...

从入门到精通数据结构----四大排序(上)
目录 首言: 1. 插入排序 1.1 直接插入排序 1.2 希尔排序 2. 选择排序 2.1 直接选择排序 2.2 堆排序 3. 交换排序 3.1 冒泡排序 3.2 快排 结尾: 首言: 本篇文章主要介绍常见的四大排序:交换排序、选择排序、插入排序、归并排…...

四旋翼变形控制:RL与MPC在混合动力学中的对比
1. 四旋翼变形控制的技术挑战与解决方案四旋翼变形控制(Quadrotor Morpho-Transition)是当前机器人领域最具挑战性的前沿技术之一。这项技术使机器人能够在空中完成形态变换,实现从飞行模式到地面模式的平滑切换。想象一下,一架四…...

Simulink中Repeating Sequence锯齿波显示恒为0解决方案
锯齿波设置如图1时,其示波器显示恒为0(如图2)。图1图2于是新建模型,只添加Repeating Sequence模块,采用原始设置发现可以正常输出锯齿波,于是调整时间参数,发现当时间设置为≥[0 0.06]时可以正常…...
)
放弃编码器!纯靠MPU6050和PID算法,手把手教你用TT马达实现平衡小车稳定控制(STM32F103C8T6实战)
纯MPU6050STM32F103的TT马达平衡车实战:无编码器PID控制全解析当大多数平衡小车方案都在强调编码器对速度反馈的不可或缺性时,我们决定挑战一个更极简的配置:仅用5美元的TT马达、9轴的MPU6050和STM32F103C8T6最小系统板,完全舍弃编…...

2026 文章代码高亮方案选型
将基于 Prism.js 或 Highlight.js 的传统高亮方案与基于 Shiki 的现代化高亮方案进行对比,其核心区别在于底层解析原理的不同(正则表达式 vs. TextMate 语法树)。 以下是两种方案的底层原理、各自优缺点、核心对比矩阵以及适用场景的详细分析…...

Java网络编程基础分享
在学习 Java 的过程中,网络编程是非常重要的一环。无论是后端开发、分布式系统、即时通讯、文件传输,还是游戏服务、物联网设备,都离不开网络通信一、计算机网络基础1.1 什么是计算机网络把不同地理位置、具有独立功能的计算机,通…...

智能体任务分配算法:从启发式到深度强化学习的演进与实践
1. 项目概述:从“谁来做”到“如何做得更好”的智能进化在机器人集群、无人机编队或是自动化仓储系统中,我们常常面临一个看似简单实则复杂的问题:眼前有一堆任务,手头有一群可用的智能体(机器人、无人机、服务器等&am…...

Actor Framework里的“多米诺骨牌”:一个错误如何让整个嵌套操作者链崩溃?
Actor Framework中的“多米诺效应”:如何避免嵌套操作者链的崩溃 在分布式系统设计中,Actor模型因其天然的并发处理能力而备受青睐。LabVIEW的Actor Framework(AF)通过操作者(actor)的嵌套结构,为复杂系统提供了模块化解决方案。然而&#x…...

如何在5分钟内免费搭建工业级OpenPLC虚拟控制器
如何在5分钟内免费搭建工业级OpenPLC虚拟控制器 【免费下载链接】OpenPLC Software for the OpenPLC - an open source industrial controller 项目地址: https://gitcode.com/gh_mirrors/op/OpenPLC OpenPLC是一款功能强大的开源虚拟PLC(可编程逻辑控制器&a…...

AVR+ESP8266双核架构打造独立WiFi天气显示器:从硬件设计到软件实现
1. 项目概述:一个独立WiFi天气显示器的诞生几年前,我琢磨着在书桌上放一个能实时显示天气信息的小玩意儿,市面上成品要么功能单一,要么价格不菲,要么数据源依赖复杂的服务器。于是,我决定自己动手ÿ…...

H.Test.DefaultApplicationBase-默认应用组合
H.Test.DefaultApplicationBase 示例项目学习教程 一、概述 H.Test.DefaultApplicationBase 展示了如何使用 WPF-Control 框架的默认应用组合(Default ApplicationBase)。这是一个"开箱即用"的应用模板,一键注册所有常用服务和模块…...