pcl::PointCloud<PointType>::Ptr extractedCloud; 尖括号里的值表示什么含义?
在C++中,pcl::PointCloud<PointType>::Ptr是一种智能指针,它是Point Cloud Library (PCL)中用于管理pcl::PointCloud对象的智能指针类型。这里的<pcl::PointCloud<PointType>::Ptr>尖括号里的值表示智能指针所指向的对象类型。
让我们分解一下这个类型:
pcl::PointCloud:这是PCL库中用于表示点云数据的类模板。PointType:这是一个模板参数,它指定了点云中点的数据类型。PointType可以是PCL库中定义的任何点类型,例如pcl::PointXYZ(表示具有x, y, z坐标的点),pcl::PointXYZRGB(表示具有x, y, z坐标和RGB颜色的点)等。::Ptr:这是PCL中定义的一个typedef,它实际上是boost::shared_ptr<pcl::PointCloud<PointType>>的一个别名。这意味着Ptr是一个共享智能指针,用于自动管理pcl::PointCloud对象的生命周期,确保对象在不再需要时自动释放内存。
因此,<pcl::PointCloud<PointType>::Ptr>尖括号里的PointType表示你正在使用的具体点类型,它定义了点云中每个点的数据结构。例如,如果你使用pcl::PointXYZ作为PointType,那么extractedCloud将是一个指向pcl::PointCloud<pcl::PointXYZ>对象的智能指针。
pcl::PointCloud 和 pcl::VoxelGrid 详细介绍
pcl::PointCloud 介绍
pcl::PointCloud 是点云库(PCL)中用于存储点云数据的主要数据结构。它是一个模板类,允许用户定义点的类型(例如,PointXYZ、PointXYZRGB等),并提供了多种功能来处理点云数据。
主要成员变量
- header:包含点云的元数据,如时间戳和传感器信息。
- points:存储点的容器,类型为
std::vector<PointT>,其中PointT是点的类型。 - width 和 height:表示点云的宽度和高度,若为有序点云,
height可以大于1;否则,height为1。 - is_dense:指示点云是否包含无效点(如 NaN 或 inf)。
- sensor_origin_ 和 sensor_orientation_:表示传感器的采集位姿,通常不需要手动设置。
使用示例
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
cloud->width = 5;
cloud->height = 1; // 一行点
cloud->points.resize(cloud->width * cloud->height);// 填充点云数据
for (size_t i = 0; i < cloud->points.size(); ++i) {cloud->points[i].x = static_cast<float>(i);cloud->points[i].y = static_cast<float>(i * 2);cloud->points[i].z = static_cast<float>(i * 3);
}pcl::VoxelGrid 介绍
pcl::VoxelGrid 是 PCL 中用于下采样点云的滤波器。它通过将点云数据分割成三维体素网格,并用每个体素内点的质心来表示该体素,从而减少点的数量。
主要功能
- 下采样:通过设置体素的大小(
leaf size),VoxelGrid可以有效地减少点云中的点数,同时保留点云的形状特征。 - 过滤:在下采样过程中,
VoxelGrid还可以过滤掉不必要的点,减少计算负担。
使用示例
#include <pcl/filters/voxel_grid.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);// 读取点云数据
pcl::io::loadPCDFile("input.pcd", *cloud);// 创建滤波器对象
pcl::VoxelGrid<pcl::PointXYZ> sor;
sor.setInputCloud(cloud);
sor.setLeafSize(0.01f, 0.01f, 0.01f); // 设置体素大小
sor.filter(*cloud_filtered); // 进行滤波std::cout << "PointCloud before filtering: " << cloud->size() << " points." << std::endl;
std::cout << "PointCloud after filtering: " << cloud_filtered->size() << " points." << std::endl;总结
pcl::PointCloud 和 pcl::VoxelGrid 是 PCL 中非常重要的两个类,前者用于存储和管理点云数据,后者则用于高效地进行点云下采样和过滤。这些功能对于处理和分析三维点云数据至关重要,特别是在机器人和计算机视觉领域的应用中。
相关文章:

pcl::PointCloud<PointType>::Ptr extractedCloud; 尖括号里的值表示什么含义?
在C中,pcl::PointCloud<PointType>::Ptr是一种智能指针,它是Point Cloud Library (PCL)中用于管理pcl::PointCloud对象的智能指针类型。这里的<pcl::PointCloud<PointType>::Ptr>尖括号里的值表示智能指针所指向的对象类型。 让我们分…...

《基于FPGA的便携式PWM方波信号发生器》论文分析(三)——数码管稳定显示与系统调试
一、论文概述 基于FPGA的便携式PWM方波信号发生器是一篇由任青颖、庹忠曜、黄洵桢、李智禺和张贤宇 等人发表的一篇期刊论文。该论文主要研究了一种新型的信号发生器,旨在解决传统PWM信号发生器在移动设备信号调控中存在的精准度低和便携性差的问题 。其基于现场可编…...

VsCode 插件推荐(个人常用)
VsCode 插件推荐(个人常用)...

路由策略与路由控制实验
AR1、AR2、AR3在互联接口、Loopback0接口上激活OSPF。AR3、AR4属于IS-IS Area 49.0001,这两者都是Level-1路由器,AR3、AR4的系统ID采用0000.0000.000x格式,其中x为设备编号 AR1上存在三个业务网段A、B、C(分别用Loopback1、2、3接…...

训练的decoder模型文本长度不一致,一般设置为多大合适,需要覆盖最长的文本长度么
在训练解码器模型时,文本长度不一致是常见的情况,需要根据任务的特性和数据集的长度分布来设置合理的最大长度 (max_length)。以下是一些指导原则,帮助你设置合适的最大长度: 1. 是否需要覆盖最长文本长度 覆盖最长文本长度: 如果任务对完整性要求很高(例如生成数学公式、…...
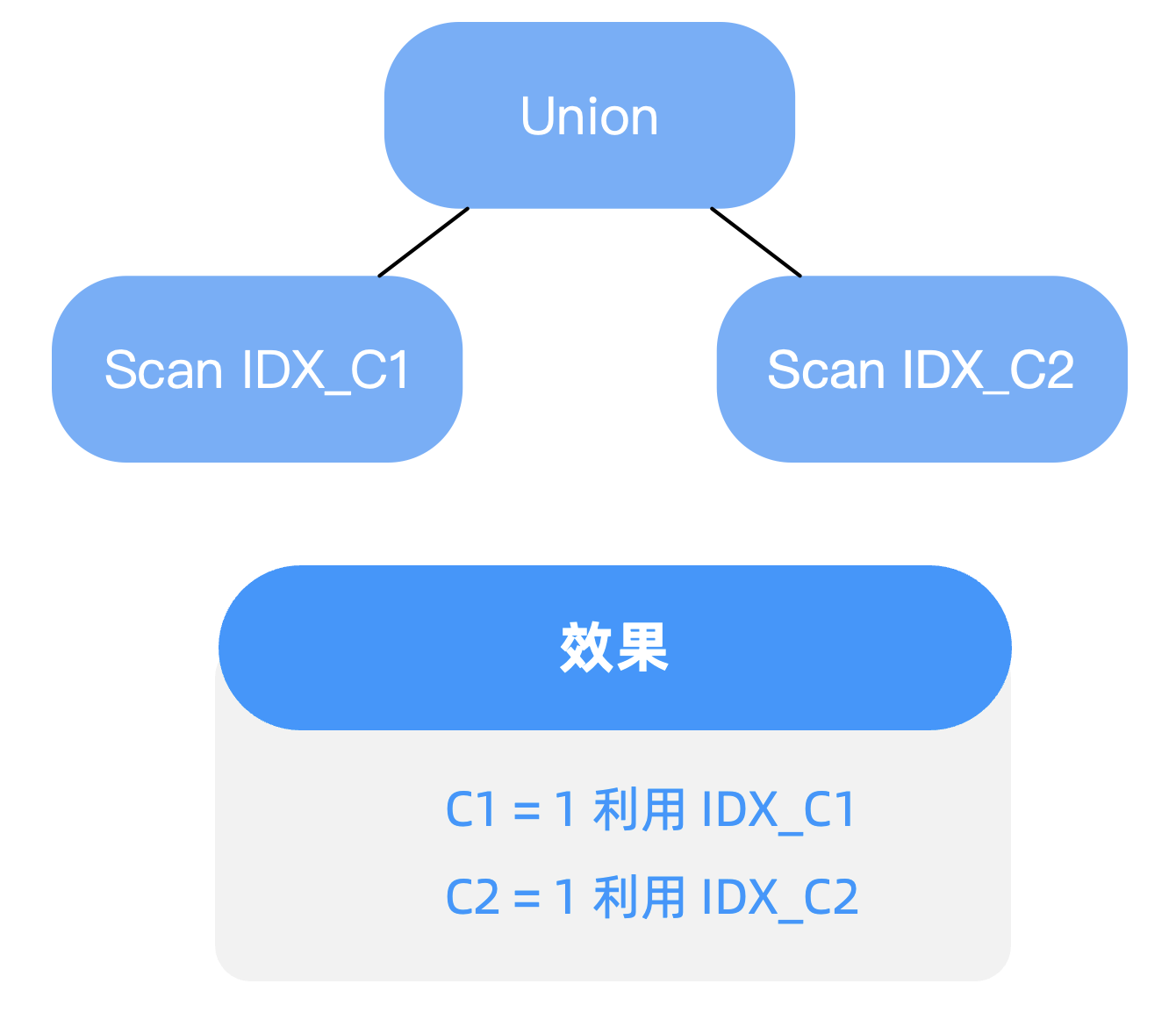
过滤条件包含 OR 谓词,如何进行查询优化——OceanBase SQL 优化实践
这篇博客涉及两个点,一个是 “OR Expansion 改写”,另一个是 “基于代价的改写”。 背景 在写SQL查询时,难以避免在过滤条件中使用 OR 谓词,但其往往会导致索引利用效率下降的问题 。本文将分享如何通过查询改写的2种方式进行优化…...

通过异步使用消息队列优化秒杀
通过异步使用消息队列优化秒杀 同步秒杀流程异步优化秒杀异步秒杀流程基于lua脚本保证Redis操作原子性代码实现阻塞队列的缺点 同步秒杀流程 public Result seckillVoucher(Long voucherId) throws InterruptedException {SeckillVoucher seckillVoucher iSeckillVoucherServi…...

AI产业告别“独奏”时代,“天翼云息壤杯”高校AI大赛奏响产学研“交响乐”
文 | 智能相对论 作者 | 陈泊丞 人工智能产业正在从“独奏”时代进入“大合奏”时代。 在早期的AI发展阶段,AI应用主要集中在少数几个领域,如语音识别、图像处理等。这些领域的研究和开发工作往往由少数几家公司或研究机构即可独立完成,犹…...

Hot100 - 字母异位词分组
Hot100 - 字母异位词分组 最佳思路:排序 时间复杂度: O(nmlogm),其中 n 为 strs 数组的长度,m 为每个字符串的长度。 代码: class Solution {public List<List<String>> groupAnagrams(String[] strs) …...

力扣hot100-->排序
排序 1. 56. 合并区间 中等 以数组 intervals 表示若干个区间的集合,其中单个区间为 intervals[i] [starti, endi] 。请你合并所有重叠的区间,并返回 一个不重叠的区间数组,该数组需恰好覆盖输入中的所有区间 。 示例 1: 输…...

【VRChat 全身动捕】VIVE 手柄改 tracker 定位器教程,低成本光学动捕解决方案(持续更新中2024.11.26)
更新 0.0.1(2024/11/26): 1.解决了内建蓝牙无法识别、“steamVR 蓝牙不可用” 的解决方案 2.解决了 tracker 虽然建立了连接但是在 steamVR 界面上看不到的问题 3.解决了 VIVE 基站1.0 无法被蓝牙识别 && 无法被 steamVR 搜索到 &…...

【Nginx】核心概念与安装配置解释
文章目录 1. 概述2. 核心概念2.1.Http服务器2.2.反向代理2.3. 负载均衡 3. 安装与配置3.1.安装3.2.配置文件解释3.2.1.全局配置块3.2.2.HTTP 配置块3.2.3.Server 块3.2.4.Location 块3.2.5.upstream3.2.6. mine.type文件 3.3.多虚拟主机配置 4. 总结 1. 概述 Nginx是我们常用的…...

Qt界面篇:QMessageBox高级用法
1、演示效果 2、用法注意 2.1 设置图标 用于显示实际图标的pixmap取决于当前的GUI样式。也可以通过设置icon pixmap属性为图标设置自定义pixmap。 QMessageBox::Icon icon(...

【二叉树】【2.1遍历二叉树】【刷题笔记】【灵神题单】
关注二叉树的三个问题: 什么情况适合自顶向下?什么时候适合用自底向上?一般来说,DFS的递归边界是空节点,什么情况下要额外把叶子节点作为递归边界?在什么情况下,DFS需要有返回值?什…...

Mongo数据库 --- Mongo Pipeline
Mongo数据库 --- Mongo Pipeline 什么是Mongo PipelineMongo Pipeline常用的几个StageExplanation with example:MongoDB $matchMongoDB $projectMongoDB $groupMongoDB $unwindMongoDB $countMongoDB $addFields Some Query Examples在C#中使用Aggreagtion Pipeline**方法一: …...
Adobe Illustrator 2024 安装教程与下载分享
介绍一下 下载直接看文章末尾 Adobe Illustrator 是一款由Adobe Systems开发的矢量图形编辑软件。它广泛应用于创建和编辑矢量图形、插图、徽标、图标、排版和广告等领域。以下是Adobe Illustrator的一些主要特点和功能: 矢量绘图:Illustrator使用矢量…...

javax.xml.ws.soap.SOAPFaultException: ZONE_OFFSET
javax.xml.ws.soap.SOAPFaultException 表示 SOAP 调用过程中发生了错误,并且服务端返回了一个 SOAP Fault。 错误信息中提到的 ZONE_OFFSET 可能指的是时区偏移量。在日期和时间处理中,时区偏移量是指格林威治标准时间 (GMT) 的偏移量。如果服务期望特…...

常用的数据结构
队列(FIFO) 栈(LIFO) 链表 hash表 hash冲突处理 开放式寻址 线性探测 表示依次检查索引为 hash(key) + 1、hash(key) + 2 ... 的位置。i 是冲突后的探查步数。公式:hash(i) = (hash(key) + i) % TableSize二次探查 规则:冲突后探查的步长是平方递增的,例如,检查位置为 hash…...

javaweb-day01-html和css初识
html:超文本标记语言 CSS:层叠样式表 1.html实现新浪新闻页面 1.1 标题排版 效果图: 1.2 标题颜色样式 1.3 标签内颜色样式 1.4设置超链接 1.5 正文排版 1.6 页面布局–盒子 (1)盒子模型 (2)页面布局…...

C++11特性(详解)
目录 1.C11简介 2.列表初始化 3.声明 1.auto 2.decltype 3.nullptr 4.范围for循环 5.智能指针 6.STL的一些变化 7.右值引用和移动语义 1.左值引用和右值引用 2.左值引用和右值引用的比较 3.右值引用的使用场景和意义 4.右值引用引用左值及其一些更深入的使用场景分…...

【职业发展】程序员成长路径:从初级到架构师的进阶指南
【职业发展】程序员成长路径:从初级到架构师的进阶指南 引言 程序员的职业发展是一个持续学习和成长的过程。从初级程序员成长为技术架构师,需要经历多个阶段的积累和蜕变。本文将详细分析程序员成长的各个阶段,帮助你规划职业发展路径。 …...
)
别再只用memcpy了!手把手教你用memcpy_s写出更安全的C语言代码(附VS2022实战)
从memcpy到memcpy_s:现代C语言安全编程实战指南 在Visual Studio 2022的编译输出窗口中,那个刺眼的C4996警告已经成为许多C语言开发者的"老朋友"。当看到"error C4996: memcpy: This function or variable may be unsafe"时…...

工程师如何运用专业技能参与人道主义项目:从思维转变到实践落地
1. 项目概述:工程师的人道主义行动倡议每年8月19日,世界人道主义日都会提醒我们关注那些在全球最艰苦、最危险地区默默奉献的人们。这个日子最初是为了纪念在履职中牺牲的人道主义工作者,如今已演变为一个更广泛的号召——庆祝那种激励全球人…...

基于Vue 3与Express的私有化ChatGPT Web客户端部署指南
1. 项目概述与核心价值最近在折腾一个自用的AI对话工具,核心需求很简单:想在一个自己完全掌控的界面上,方便地使用大语言模型,比如ChatGPT的API。市面上虽然有很多现成的网页应用,但要么功能太臃肿,要么部署…...

从服务器到手机:手把手教你修改游戏客户端IP,让私服在手机上跑起来
移动游戏私服客户端IP修改实战指南 当你在服务器上成功部署了游戏私服后,最令人沮丧的莫过于发现手机上的官方客户端无法连接到你的私人服务器。这个看似简单的"最后一公里"问题,往往成为许多私服搭建者的拦路虎。本文将彻底解决这个痛点&…...

从‘一个材质’到‘上百个Shader’:用UE4材质实例化彻底搞懂Static Switch的代价与正确用法
从‘一个材质’到‘上百个Shader’:UE4材质实例化中Static Switch的陷阱与优化实践 在Unreal Engine 4的材质创作中,Static Switch Parameter(静态开关参数)就像一把双刃剑——它能让美术师快速切换不同材质效果,却也暗…...

Honey Select 2一站式智能优化方案:HS2-HF Patch高效整合200+插件
Honey Select 2一站式智能优化方案:HS2-HF Patch高效整合200插件 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 还在为《Honey Select 2》的翻译不…...
)
DIY焊台实战:用STM32F070F6P6的Encoder模式搞定EC11编码器(附完整CubeMX配置)
DIY焊台实战:用STM32F070F6P6的Encoder模式搞定EC11编码器(附完整CubeMX配置) 在电子DIY的世界里,焊台是每个硬件爱好者的必备工具。而一个精准可控的T12焊台,不仅能提升焊接效率,更能让整个DIY过程充满乐趣…...
安装配置学习分享教程(四篇连载)第四篇:ADT连接故障排查与环境迁移教程)
SAP-ABAP:ABAP Development Tools(ADT)安装配置学习分享教程(四篇连载)第四篇:ADT连接故障排查与环境迁移教程
ABAP Development Tools(ADT)安装配置学习分享教程(四篇连载) 第四篇:ADT连接故障排查与环境迁移教程 ADT连不上SAP后端?刚刚还好好的系统突然报错了?换了新电脑要重建整个开发环境?…...
)
Midjourney Anthotype印相工作流全拆解(含v6.1专属--style raw+自定义光照映射公式)
更多请点击: https://intelliparadigm.com 第一章:Anthotype印相工艺的历史溯源与数字转译本质 Anthotype(植物感光印相)是一种诞生于1839年的前摄影术实践,由英国科学家Sir John Herschel首次系统记录。它利用植物汁…...