双目相机的标定,视差图,深度图,点云生成思路与实现。
该文档记录从双目相机标定到点云生成的所有过程,同时会附上代码。
代码直接能跑。https://github.com/stu-yzZ/stereoCamera
目录
大致思路如下:
一、相机标定
1、相机参数介绍
2、单目相机标定
3、双目相机标定
二、图片畸变矫正
三、极线矫正
1、极线矫正
2、投影矩阵Q
3、图片检查
四、SGBM局部匹配算法计算视差图,并填充
1、设置立体匹配算法SGBM
2、WLS+视差图空洞填充
五、通过视差图计算深度图并可视化
六、通过视差图和Q矩阵计算每个二维坐标对应的三维坐标,同时获取颜色。
七、点云的显示
反思:
大致思路如下:
首先标定双目相机,获取每个相机的内参,同时对相机进行标定,获取相机的相对位置参数,也就是外参。
然后通过相机拍图片并对图片进行矫正(畸变矫正和立体矫正)然后通过立体匹配算法计算视差图,通过视差图计算深度图,有了视差图很多问题都可以解决了,通过视差图可以获得点云信息。



点云数据太大了 我电脑跑不动,但大致可以看到将图片像右旋转45°即和图片视角一致。

一、相机标定
相机标定获取相机参数,用来矫正图。并且要使用相机参数对拍摄的图片进行矫正。相机标定非常重要,所有的计算都是基于相机参数进行的,如果误差较大,后面所有步骤都会受到影响。我自己从淘宝上买了个200左右的双目相机,标定之后结果一直很差,非常影响后续的视差图和深度图的计算。
但是标定的过程一定要自己动手做,只有亲自动手,才能知道一些细节。由于硬件限制(姑且认为是吧),我转换思路,用别人标定好的参数和图片进行视差图和深度图的实现。使用https://vision.middlebury.edu/stereo/data/,这个数据集MiddleburyStereoDatasets进行后续步骤。
1、相机参数介绍
拿单目相机举例,四个坐标系之间需要变换,主要是参数有相机内参和外参。
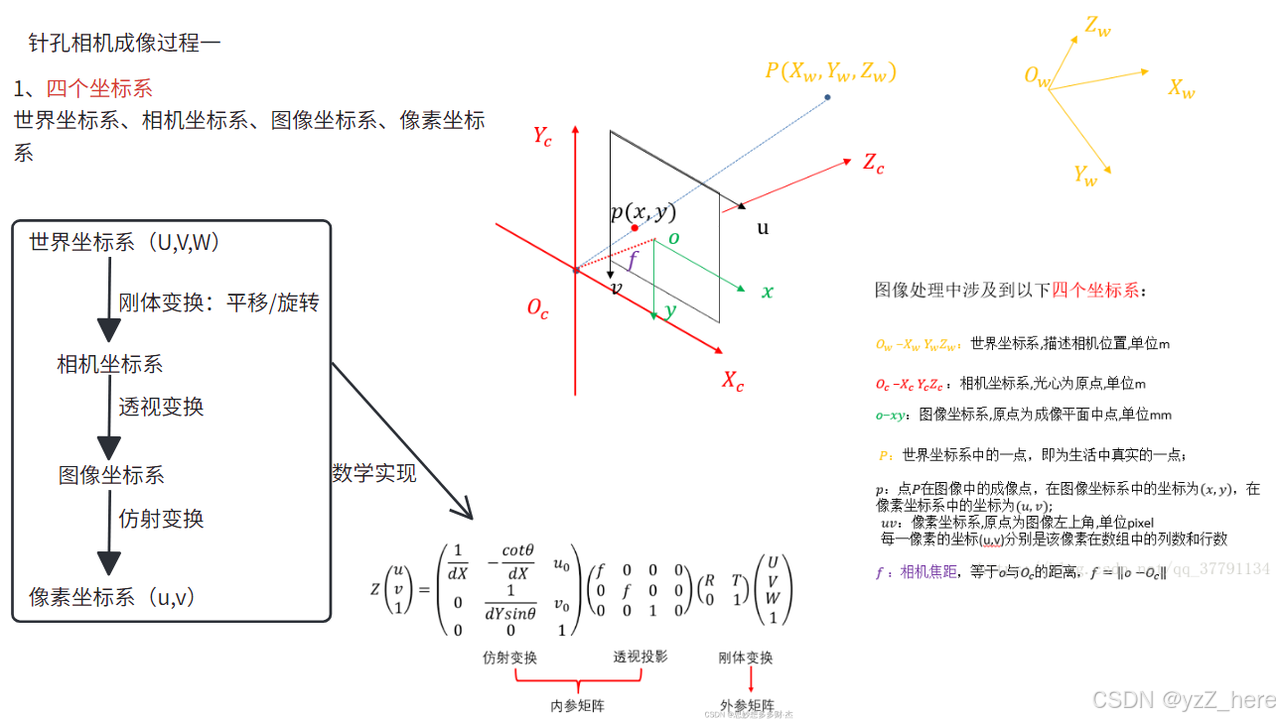
四个坐标系:世界坐标系->相机坐标系->图像坐标系->像素坐标系
内参:共有11个参数变量。其中,相机的内部参数有5个:焦距,像主点坐标,畸变参数;相机的外部参数有6个:旋转,平移。
2、单目相机标定
需要准备一个标定板,一台相机,尽可能多的拍一下照片,张正友标定法。但是标定出高精度的结果太难了,我还是暂时跳过了这个精度的要求,暂时先把整条思路打通。
3、双目相机标定
双目相机标定除了求解每个摄像头的内参外,还需要求解两个摄像头之间的 相对位置 和 姿态,即 外参(旋转矩阵和平移向量)。其中平移矩阵的(以我选择的artroom1的参数为例)是这样的self.T = np.array([[-536.62], [0.0], [0.0]]),其中第一个元素是对应的你自己相机的基线长度,也就是两个相机镜头的距离,单位是mm。如果是自己标定的话也可以通过这个参数判断自己标定误差大小。
二、图片畸变矫正
使用畸变参数对图片进行矫正
cv.undistort该函数可以实现畸变矫正功能。双目相机的话需要对左右两张图像都进行矫正操作。
void undistort( InputArray src, //输入原图OutputArray dst,//输出矫正后的图像InputArray cameraMatrix,//内参矩阵InputArray distCoeffs,//畸变系数InputArray newCameraMatrix=noArray() );三、极线矫正
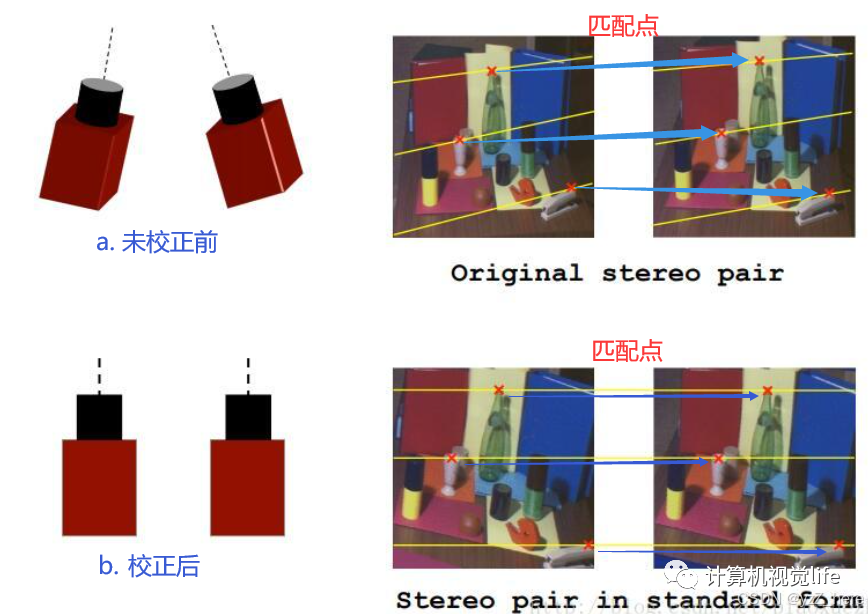
非常重要的一步,将立体匹配从二维降到一维。(对极约束,是将搜索空间约束到像平面内的一条直线上)
1、极线矫正
这篇文章从原理讲的很细,会让人有生畏的感觉https://zhuanlan.zhihu.com/p/466758105。你也可以跳过没懂的地方,首先你要知道匹配的意思就是要从针对左视图中的某一个像素,在右试图中找到对应的匹配像素,如果不做立体矫正的话,需要从右视图的整个图片中搜索,如果做了立体匹配,可以将匹配过程从整张图片(二维空间)降低到一维空间,极线矫正之后空间中点在左右视图中的投影在同一条直线上。
下面代码展示了从读取图片到极线矫正,并检测矫正情况的过程。
# 读取图像imgl = cv.imread('1_L.jpg')imgr = cv.imread('1_R.jpg')high, wide = imgl.shape[0:2]# 读取相机参数config = stereoCamera()# 消除图像畸变imgl_qb = cv.undistort(imgl, config.cam_matrix_l, config.distortion_l)imgr_qb = cv.undistort(imgr, config.cam_matrix_r, config.distortion_r)# 极线校正map1x, map1y, map2x, map2y, Q = getRectifyTransform(high, wide, config)imgl_jx, imgr_jx = rectifyImage(imgl_qb, imgr_qb, map1x, map1y, map2x, map2y)# print("Print Q!")# print(Q)# 绘制等间距平行线,检查效果line = draw_line(imgl_jx, imgr_jx)其中draw_line函数为:
def draw_line(img1, img2):height = max(img1.shape[0], img2.shape[0])width = img1.shape[1] + img2.shape[1]output = np.zeros((height, width, 3), dtype=np.uint8)output[0:img1.shape[0], 0:img1.shape[1]] = img1output[0:img2.shape[0], img1.shape[1]:] = img2line_interval = 50 # 直线间隔for k in range(height // line_interval):cv.line(output, (0, line_interval * (k + 1)),(2 * width, line_interval * (k + 1)),(0, 255, 0), thickness=2, lineType=cv.LINE_AA)# plt.imshow(output, 'gray')# plt.show()return output2、投影矩阵Q
Q矩阵在后面生成3D点云的时候要用到。暂不多解释。
3、图片检查
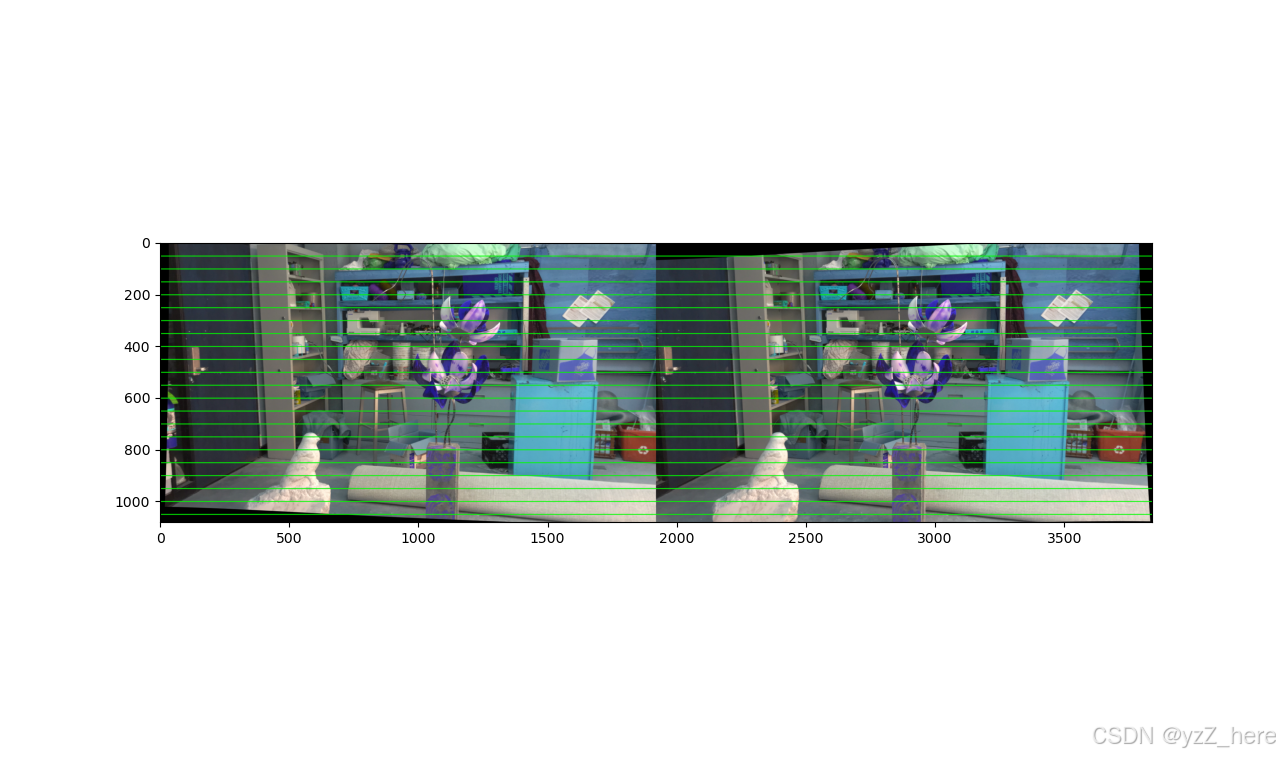
极线矫正之后的图片进行检查,这个过程很难界定怎么样算是好的,或许肉眼看着在同一个平面但是在像素层面上来看并没有对齐,总的来说这个结果也是和标定结果强相关。我自己标定的结果打印出来感觉没有差很多,但是最后视差图和深度图还是效果很差。下面这是我使用数据集中的参数和图片显示的结果,(数据集中的图片已经是畸变矫正和立体匹配之后的图片,所以他们肯定极线对齐的)
四、SGBM局部匹配算法计算视差图,并填充
通过opencv获取视差图
1、设置立体匹配算法SGBM
SGBM属于局部匹配算法,我调试下来的感觉就是泛化性很低,甚至图片场景变化大的话基本上一张图片对应一套参数,计算量先不谈,我22款拯救者y9000P还能带动,SGBM算法原理我没有太深究,主要的参数调整网上有很多讲解的,可以自己看,比较重要的就是windowssize和最大最小视差,视差值对应图片的深度也就是拍照的距离。窗口大小会影响视差图的平滑与否,可以自己设置调试下。且最大最小视差可以通过拍照的距离计算出来。根据深度计算公式,已知最大最小深度也就是拍照的最近最远距离,可以计算出视差值。我使用的数值来自于数据集中提供的。
同时需要注意视差图的精度问题。
def opencv_SGBM(left_img, right_img, use_wls=False):blockSize = 11paramL = {"minDisparity": 0, #表示可能的最小视差值。通常为0,但有时校正算法会移动图像,所以参数值也要相应调整"numDisparities": 170, #表示最大的视差值与最小的视差值之差,这个差值总是大于0。在当前的实现中,这个值必须要能被16整除,越大黑色边缘越多,表示不能计算视差的区域"blockSize": blockSize,"P1": 8 * 3 * blockSize * blockSize, #控制视差图平滑度的第一个参数"P2": 32 * 3 * blockSize * blockSize, #控制视差图平滑度的第二个参数,值越大,视差图越平滑。P1是邻近像素间视差值变化为1时的惩罚值,#p2是邻近像素间视差值变化大于1时的惩罚值。算法要求P2>P1,stereo_match.cpp样例中给出一些p1和p2的合理取值。"disp12MaxDiff": 1, #表示在左右视图检查中最大允许的偏差(整数像素单位)。设为非正值将不做检查。"uniquenessRatio": 10, #表示由代价函数计算得到的最好(最小)结果值比第二好的值小多少(用百分比表示)才被认为是正确的。通常在5-15之间。"speckleWindowSize": 50, #表示平滑视差区域的最大窗口尺寸,以考虑噪声斑点或无效性。将它设为0就不会进行斑点过滤,否则应取50-200之间的某个值。"speckleRange": 1, #指每个已连接部分的最大视差变化,如果进行斑点过滤,则该参数取正值,函数会自动乘以16、一般情况下取1或2就足够了。"preFilterCap": 31,"mode": cv.STEREO_SGBM_MODE_SGBM_3WAY}matcherL = cv.StereoSGBM_create(**paramL)# 计算视差图dispL = matcherL.compute(left_img, right_img)# WLS滤波平滑优化图像if use_wls:paramR = paramLparamR['minDisparity'] = -paramL['numDisparities']matcherR = cv.StereoSGBM_create(**paramR)dispR = matcherR.compute(right_img, left_img)# dispR = np.int16(dispR)lmbda = 80000sigma = 1.0filter = cv.ximgproc.createDisparityWLSFilter(matcher_left=matcherL)filter.setLambda(lmbda)filter.setSigmaColor(sigma)dispL = filter.filter(dispL, left_img, None, dispR)#双边滤波dispL = cv2.bilateralFilter(dispL.astype(np.float32), d=9, sigmaColor=75, sigmaSpace=75)# 除以16得到真实视差(因为SGBM算法得到的视差是×16的)dispL[dispL < 0] = 1e-6dispL = dispL.astype(np.int16)dispL = dispL / 16.0return dispL2、WLS+视差图空洞填充
wls叫做基于加权最小二乘法的保边缘平滑滤波器。目的是对图像进行平滑处理,代码在上,主要是对视差图进行平滑处理。
这篇文章讲解了基于积分的空洞填充,也包括整个双目视觉的大致流程,也包括一些细节的内容,比如提到了精度相关的知识,我受益匪浅,https://www.cnblogs.com/riddick/p/8486223.html这篇博文是2018年发表的,不得不感慨……
空洞填充可以使得视差图更加的平滑和高质量。但是需要较大算力支持。
五、通过视差图计算深度图并可视化
通过公式计算每个像素(可计算像素)的深度坐标,同时生成深度图并可视化。
1、计算深度图并可视化
直接根据深度计算公式对视差图进行计算,但是要确定深度的单位,z=(f*b)/d,其中f和d的单位是像素,b(baseline)的单位是米,计算出来的z深度单位也是米。
六、通过视差图和Q矩阵计算每个二维坐标对应的三维坐标,同时获取颜色。
1、生成点云信息并保存
看代码即可。没有什么逻辑。
七、点云的显示
1、点云(6d)显示
数据太大了,可以在线展示点云,但是没有颜色信息,看起来不是很直观。
反思:
1、我在这个过程遇到了困扰我很久的问题,就是视差图生成了(虽然差一些),但是深度图一直显示不出来,用颜色映射出来都是红色的。我解决问题的思路一直在视差图转深度图的转换上了,其实最后才意识到源头在于视差图中计算出有大量的无限接近0的数值存在,导致深度无穷远,所以深度图中显示全红,同时也是看到了Middlebury数据集中给出的有效的视差范围,我才意识到这个问题,所以我想说的是如果遇到同样的问题可以将视差图中的数值分布打印成直方图,看看0附近的值是不是非常多,并且确定你自己图像的邮箱视差范围,在深度生成过程中将小于最小有效值的视差值都赋值为最小有效值。这样可以保证视差图转深度图没有问题。
相关文章:
双目相机的标定,视差图,深度图,点云生成思路与实现。
该文档记录从双目相机标定到点云生成的所有过程,同时会附上代码。 代码直接能跑。https://github.com/stu-yzZ/stereoCamera 目录 大致思路如下: 一、相机标定 1、相机参数介绍 2、单目相机标定 3、双目相机标定 二、图片畸变矫正 三、极线矫正…...

【H2O2|全栈】MySQL的基本操作(三)
目录 前言 开篇语 准备工作 案例准备 多表查询 笛卡尔积 等值连接 外连接 内连接 自连接 子查询 存在和所有 含于 分页查询 建表语句 结束语 前言 开篇语 本篇继续讲解MySQL的一些基础的操作——数据字段的查询中的多表查询和分页查询,与单表查询…...

2、C++命名空间
命名空间 命名空间是一种用来避免命名冲突的机制; 原理是将一个全局的作用域分成一个个命名空间,每个命名空间是个单独的作用域,从而有效避免命名冲突。 注意:命名空间定义在全局 命名空间定义格式 使用: …...
Elemenu-UI时间日期单个组件,限制当前日期之后的时间
element的时间日期组件, type"datetime" ,当你设置了:picker-options"pickerOptions"之后 pickerOptions: { disabledDate(time) { return time.getTime() > Date.now(); }, }, 会发现,他只会限制日期,但不…...

flutter修改状态栏学习
在flutter中如何动态更改状态栏的颜色和风格。 前置知识点学习 AnnotatedRegion AnnotatedRegion 是 Flutter 中的一个小部件,用于在特定区域中提供元数据(metadata)以影响某些系统级的行为或外观。它通常用于改变系统 UI 的外观ÿ…...

解决Unity编辑器Inspector视图中文注释乱码
1.问题介绍 新创建一个脚本,用VS打开编辑,增加一行中文注释保存,在Unity中找到该脚本并选中,Inspector视图中预览的显示内容,该中文注释显示为乱码,如下图所示: 2.图示解决步骤 按上述步骤操作…...

关于csgo的游戏作弊与封禁
关于csgo的游戏作弊与封禁 一.关于作弊 什么叫作弊? 1.换肤,换库存 2.各种参(回溯,自瞄,透视,急停,连跳,假身,子弹跟踪等) 3.某一部分更改游戏内存&…...

严格单元测试造就安全软件
在信息技术迅速发展的今天,软件在各个行业中扮演着至关重要的角色,尤其是在汽车行业,其中软件的可靠性和安全性直接影响到人们的生命安全。软件缺陷所带来的潜在风险不容小觑,尤其在涉及到自动驾驶和车辆控制等关键系统时…...

ubuntu 根分区逻辑卷扩容
1、虚拟机关机通过管理界面给磁盘扩容。 rootcurtis:/home/curtis/git_code# pvdisplay--- Physical volume ---PV Name /dev/vda3VG Name ubuntu-vgPV Size <239.00 GiB / not usable 0Allocatable yes (but full)PE…...

如何查看电脑生产日期
查看电脑的生产日期通常可以通过以下方法实现,具体方式取决于操作系统和电脑类型: 方法 1:检查电脑 BIOS 生产日期通常记录在 BIOS 中。可以通过以下步骤查看: 重启电脑并进入 BIOS: 启动时按下特定的键(…...

MAC M1 mysql 8.0 如何修改root用户密码
关闭mysql服务 使用brew方式安装,可以通过一下命令关闭 brew services stop mysql使用安装包安装的方式 可以选择🍎->系统偏好设置->最下方单机MySQL图标->stop mysql server 启动 MySQL 到安全模式 sudo mysqld_safe --skip-grant-tables …...

漫画之家系统:Spring Boot框架下的漫画版权保护
摘 要 随着信息技术和网络技术的飞速发展,人类已进入全新信息化时代,传统管理技术已无法高效,便捷地管理信息。为了迎合时代需求,优化管理效率,各种各样的管理系统应运而生,各行各业相继进入信息管理时代&a…...
在 MacOS 上为 LM Studio 更换镜像源
在 MacOS 之中使用 LM Studio 部署本地 LLM时,用户可能会遇到无法下载模型的问题。 一般的解决方法是在 huggingface.co 或者国内的镜像站 hf-mirror.com 的项目介绍卡页面下载模型后拖入 LM Studio 的模型文件夹。这样无法利用 LM Studio 本身的搜索功能。 本文将…...

Nginx配置https(Ubuntu、Debian、Linux、麒麟)
Ubuntu操作系统,Debian系统底层是Ubuntu,差异不大 ubuntu 安装nginx 1.安装依赖 sudo apt-get update sudo apt-get install gcc sudo apt-get install libpcre3 libpcre3-dev sudo apt-get install zlib1g zlib1g-dev sudo apt-get install openssl lib…...
「Mac畅玩鸿蒙与硬件40」UI互动应用篇17 - 照片墙布局
本篇将带你实现一个简单的照片墙布局应用,通过展示多张图片组成照片墙效果,用户可以点击图片查看其状态变化。 关键词 UI互动应用照片墙布局Grid 布局动态图片加载用户交互 一、功能说明 照片墙布局应用的特点: 动态加载多张图片组成网格布…...

VMware Workstation 安装Ubuntu 系统(图文步骤)
之前一直在讲Ubuntu Linux的用户和组 链接: Linux专栏 今天来讲讲Ubuntu 系统基础的安装步骤!!! 废话少说,马上开始! 文章目录 前言准备安装环境先下载Ubuntu 镜像 详细安装步骤如下新建虚拟机默认使用 15.…...

mybatis用pagehelper 然后用CountJSqlParser45,发现自己手写的mapper查询效率很慢
如题 效率慢疑惑 效率慢 分页查询,发现效率很慢,然后发现是比较复杂的sql,CountJSqlParser45它不会帮忙优化掉,就是select多少字段它count的时候也还是这么多字段 框架里的用法是这样的 所以去看了CountJSqlParser45里面的代码,发现如果有group之类的,它就不帮忙把count优化…...

【优选算法 二分查找】二分查找入门详解:二分查找 & 在排序数组中查找元素的第一个和最后一个位置
二分查找 题目描述 题目解析 暴力解法 我们可以从左往右遍历一次数组,如果存在 target 则返回数组的下标,否则返回 -1; 时间复杂度 O(N),因为没有利用数组有序的特点,每次比较只能舍弃一个要比较的数&…...

WPF编写工业相机镜头选型程序
该程序满足面阵和线阵的要求。 前端代码 <Window x:Class"相机镜头选型.MainWindow" Loaded"Window_Loaded"xmlns"http://schemas.microsoft.com/winfx/2006/xaml/presentation"xmlns:x"http://schemas.microsoft.com/winfx/2006/xaml…...

网络安全内容整理二
网络嗅探技术 网络监听 网络监听,也称网络嗅探(Network Sniffing):在他方未察觉的情况下捕获其通信报文、通信内容的技术 网卡的工作模式: 1.广播模式(Broadcast Mode):网卡能够接收网络中的广播信息 2.组播模式(Multicast Mo…...

终极GitHub加速解决方案:告别国内访问缓慢的完整指南
终极GitHub加速解决方案:告别国内访问缓慢的完整指南 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 对于众多国内开发…...

收藏!AI时代,软件工程基本功才是你的核心竞争力
在AI coding时代,软件工程的基本功不仅没有过时,反而比以往任何时候都更加重要。AI是放大器,好的代码库能提升效率,而模糊混乱的代码库则会放大混乱。接口、边界、领域语言和测试等“老派”的基本功,是开发者手中杠杆率…...
才是成败关键)
别只盯着S21!用ADS仿真LNA时,这3个容易被忽略的细节(稳定性、实际元件模型、噪声圆)才是成败关键
别只盯着S21!用ADS仿真LNA时这3个关键细节才是成败关键 在射频前端设计中,低噪声放大器(LNA)的性能往往决定了整个系统的信噪比表现。许多工程师在使用ADS进行LNA仿真时,常常满足于S21参数达到预期就匆忙进入制版阶段&…...

2026年写作类国际竞赛测评:从技术视角分析高含金量赛事与留学背景提升策略
导读:本文基于 2026 年最新赛事数据,从学术认可度、升学加成、参赛门槛、时间成本、获奖概率五个技术维度,对全球主流写作类国际竞赛进行量化测评。通过构建多维度评分模型,为留学申请者提供科学的竞赛选择与背景提升方案。 目录 …...

【技术解析】目标导向语义探索:如何让机器人学会“按图索骥”
1. 当机器人学会"按图索骥" 想象一下,你被蒙着眼睛带进一个陌生的家具商场,任务是找到一张红色沙发。正常人会先摸到墙壁确定方位,听到脚步声判断通道方向,闻到咖啡香推测休息区位置——这种多模态信息整合能力&#x…...

范式跃迁·代差引领:时空AI重塑全域空间感知新基准
九大维度技术范式革新——传统UWB硬件局限与镜像视界算力原生体系全维度对标解析纵观全球高精度空间感知、数字孪生与实景时空治理产业发展脉络,行业数十年以来始终依托有源射频硬件、物理信号测距、固定式硬件组网、工程化场景改造的传统技术范式完成迭代落地。以U…...

AnyKernel3:Android内核刷机终极指南 - 5分钟构建通用刷机包
AnyKernel3:Android内核刷机终极指南 - 5分钟构建通用刷机包 【免费下载链接】AnyKernel3 AnyKernel, Evolved 项目地址: https://gitcode.com/gh_mirrors/an/AnyKernel3 在Android设备定制化领域,内核刷机是提升性能、扩展功能的关键步骤。AnyKe…...

Perplexity查不出薛定谔方程推导?紧急修复指南:4步重置知识图谱权重,实测响应准确率从62%→98.7%
更多请点击: https://intelliparadigm.com 第一章:Perplexity物理知识查询 Perplexity 是一款基于大语言模型的实时网络增强型问答工具,其在物理知识查询场景中展现出独特优势:它能动态检索权威物理数据库(如NIST、ar…...

Python开发者三步完成Taotoken接入并调用多模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Python开发者三步完成Taotoken接入并调用多模型 对于希望便捷使用多种大语言模型的Python开发者而言,通过一个统一的AP…...
)
Docker容器化高可用架构部署方案(十二)
11-MySQL-MGR初始化 本文档详细介绍MySQL MGR(Group Replication)集群的初始化步骤。 初始化前提 三个MySQL容器已正常运行 MySQL容器healthcheck通过 网络连通性正常 初始化步骤 步骤1:等待MySQL容器就绪 # 查看MySQL容器状态 docke…...