OpenCV相机标定与3D重建(10)眼标定函数calibrateHandEye()的使用
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
计算手眼标定: g T c _{}^{g}\textrm{T}_c gTc
cv::calibrateHandEye 是 OpenCV 中用于手眼标定的函数。该函数通过已知的机器人末端执行器(gripper)相对于基座(base)和平板(target)相对于相机(cam)的姿态来计算相机相对于末端执行器的姿态。
该函数使用各种方法进行手眼标定。一种方法包括先估计旋转再估计平移(可分离解法),并且实现了以下方法:
-
R. Tsai, R. Lenz A New Technique for Fully Autonomous and Efficient 3D Robotics Hand/Eye Calibration [269]
-
F. Park, B. Martin Robot Sensor Calibration: Solving AX = XB on the Euclidean Group [208]
-
R. Horaud, F. Dornaika Hand-Eye Calibration [124]
另一种方法包括同时估计旋转和平移(同时解法),并且实现了以下方法: -
N. Andreff, R. Horaud, B. Espiau On-line Hand-Eye Calibration [12]
-
K. Daniilidis Hand-Eye Calibration Using Dual Quaternions [63]
下图描述了手眼标定问题,其中需要估计安装在机器人末端执行器上的相机(“eye”)相对于末端执行器(“hand”)的变换。这种配置称为 eye-in-hand。
eye-to-hand 配置由一个静态相机观察安装在机器人末端执行器上的校准图案组成。然后可以通过输入合适的变换矩阵到函数中来估计从相机到机器人基座坐标系的变换,见下方说明。

标定过程如下:
使用静态校准图案来估计目标坐标系和相机坐标系之间的变换。
移动机器人末端执行器以获取多个姿态。
对于每个姿态,记录从末端执行器坐标系到机器人基座坐标系的齐次变换矩阵,例如使用机器人的运动学。
[ X b Y b Z b 1 ] = [ b R g b t g 0 1 × 3 1 ] [ X g Y g Z g 1 ] \begin{bmatrix} X_b\\ Y_b\\ Z_b\\ 1 \end{bmatrix} = \begin{bmatrix} _{}^{b}\textrm{R}_g & _{}^{b}\textrm{t}_g \\ 0_{1 \times 3} & 1 \end{bmatrix} \begin{bmatrix} X_g\\ Y_g\\ Z_g\\ 1 \end{bmatrix} XbYbZb1 =[bRg01×3btg1] XgYgZg1
对于每个姿态,记录从校准目标坐标系到相机坐标系的齐次变换矩阵,例如使用基于2D-3D点对应关系的姿态估计方法(PnP)。
[ X c Y c Z c 1 ] = [ c R t c t t 0 1 × 3 1 ] [ X t Y t Z t 1 ] \begin{bmatrix} X_c\\ Y_c\\ Z_c\\ 1 \end{bmatrix} = \begin{bmatrix} _{}^{c}\textrm{R}_t & _{}^{c}\textrm{t}_t \\ 0_{1 \times 3} & 1 \end{bmatrix} \begin{bmatrix} X_t\\ Y_t\\ Z_t\\ 1 \end{bmatrix} XcYcZc1 =[cRt01×3ctt1] XtYtZt1
手眼标定过程返回以下齐次变换矩阵:
[ X g Y g Z g 1 ] = [ g R c g t c 0 1 × 3 1 ] [ X c Y c Z c 1 ] \begin{bmatrix} X_g\\ Y_g\\ Z_g\\ 1 \end{bmatrix} = \begin{bmatrix} _{}^{g}\textrm{R}_c & _{}^{g}\textrm{t}_c \\ 0_{1 \times 3} & 1 \end{bmatrix} \begin{bmatrix} X_c\\ Y_c\\ Z_c\\ 1 \end{bmatrix} XgYgZg1 =[gRc01×3gtc1] XcYcZc1
这个问题也被称为求解 AX=XB 方程:
对于 eye-in-hand 配置

对于 eye-to-hand 配置

注意
更多信息可以在该网站上找到。
至少需要两个具有非平行旋转轴的运动来确定手眼变换。因此,至少需要 3 个不同的姿态,但强烈建议使用更多的姿态。
函数原型
void cv::calibrateHandEye
(InputArrayOfArrays R_gripper2base,InputArrayOfArrays t_gripper2base,InputArrayOfArrays R_target2cam,InputArrayOfArrays t_target2cam,OutputArray R_cam2gripper,OutputArray t_cam2gripper,HandEyeCalibrationMethod method = CALIB_HAND_EYE_TSAI
)
参数
- 参数[in] R_gripper2base: 从齐次矩阵中提取的旋转部分,该矩阵将一个用末端执行器坐标系表示的点变换到机器人基座坐标系 ( b T g _{}^{b}\textrm{T}_g bTg)。这是一个包含所有从末端执行器坐标系到机器人基座坐标系变换的旋转矩阵(3x3)或旋转向量(3x1)的向量(vector)。
- 参数[in] t_gripper2base: 从齐次矩阵中提取的平移部分,该矩阵将一个用末端执行器坐标系表示的点变换到机器人基座坐标系 ( b T g _{}^{b}\textrm{T}_g bTg)。这是一个包含所有从末端执行器坐标系到机器人基座坐标系变换的平移向量(3x1)的向量(vector)。
- 参数[in] R_target2cam: 从齐次矩阵中提取的旋转部分,该矩阵将一个用校准目标坐标系表示的点变换到相机坐标系 ( c T t _{}^{c}\textrm{T}_t cTt)。这是一个包含所有从校准目标坐标系到相机坐标系变换的旋转矩阵(3x3)或旋转向量(3x1)的向量(vector)。
- 参数[in] t_target2cam: 从齐次矩阵中提取的平移部分,该矩阵将一个用校准目标坐标系表示的点变换到相机坐标系 ( c T t _{}^{c}\textrm{T}_t cTt)。这是一个包含所有从校准目标坐标系到相机坐标系变换的平移向量(3x1)的向量(vector)。
- 参数[out] R_cam2gripper: 估计的从齐次矩阵中提取的旋转部分,该矩阵将一个用相机坐标系表示的点变换到末端执行器坐标系 ( g T c _{}^{g}\textrm{T}_c gTc)。这是一个 3x3 的旋转矩阵。
- 参数[out] t_cam2gripper: 估计的从齐次矩阵中提取的平移部分,该矩阵将一个用相机坐标系表示的点变换到末端执行器坐标系 ( g T c _{}^{g}\textrm{T}_c gTc)。这是一个 3x1 的平移向量。
- 参数[in] method: 实现的手眼标定方法之一,见 cv::HandEyeCalibrationMethod。
代码示例
#include <iostream>
#include <opencv2/opencv.hpp>
#include <vector>using namespace cv;
using namespace std;int main()
{// 假设我们有四组数据,分别对应不同的抓取位置int num_poses = 4;// 从 gripper 到 base 的旋转矩阵和位移向量vector< Mat > R_gripper2base( num_poses );vector< Mat > t_gripper2base( num_poses );// 从 target 到 cam 的旋转矩阵和位移向量vector< Mat > R_target2cam( num_poses );vector< Mat > t_target2cam( num_poses );// 初始化示例数据R_gripper2base[ 0 ] = ( Mat_< double >( 3, 3 ) << 1, 0, 0, 0, 1, 0, 0, 0, 1 );t_gripper2base[ 0 ] = ( Mat_< double >( 3, 1 ) << 0.1, 0.2, 0.3 );R_gripper2base[ 1 ] = ( Mat_< double >( 3, 3 ) << 0, -1, 0, 1, 0, 0, 0, 0, 1 );t_gripper2base[ 1 ] = ( Mat_< double >( 3, 1 ) << 0.4, 0.5, 0.6 );R_gripper2base[ 2 ] = ( Mat_< double >( 3, 3 ) << 0, 0, -1, 0, 1, 0, 1, 0, 0 );t_gripper2base[ 2 ] = ( Mat_< double >( 3, 1 ) << 0.7, 0.8, 0.9 );R_gripper2base[ 3 ] = ( Mat_< double >( 3, 3 ) << 0, 0, 1, 0, 1, 0, -1, 0, 0 );t_gripper2base[ 3 ] = ( Mat_< double >( 3, 1 ) << 1.0, 1.1, 1.2 );R_target2cam[ 0 ] = ( Mat_< double >( 3, 3 ) << 1, 0, 0, 0, 1, 0, 0, 0, 1 );t_target2cam[ 0 ] = ( Mat_< double >( 3, 1 ) << 0.3, 0.4, 0.5 );R_target2cam[ 1 ] = ( Mat_< double >( 3, 3 ) << 0, -1, 0, 1, 0, 0, 0, 0, 1 );t_target2cam[ 1 ] = ( Mat_< double >( 3, 1 ) << 0.6, 0.7, 0.8 );R_target2cam[ 2 ] = ( Mat_< double >( 3, 3 ) << 0, 0, -1, 0, 1, 0, 1, 0, 0 );t_target2cam[ 2 ] = ( Mat_< double >( 3, 1 ) << 0.9, 1.0, 1.1 );R_target2cam[ 3 ] = ( Mat_< double >( 3, 3 ) << 0, 0, 1, 0, 1, 0, -1, 0, 0 );t_target2cam[ 3 ] = ( Mat_< double >( 3, 1 ) << 1.2, 1.3, 1.4 );// 输出变量Mat R_cam2gripper, t_cam2gripper;// 执行手眼标定calibrateHandEye( R_gripper2base, t_gripper2base, R_target2cam, t_target2cam, R_cam2gripper, t_cam2gripper, CALIB_HAND_EYE_TSAI );// 输出结果cout << "Rotation matrix from camera to gripper:\n" << R_cam2gripper << endl;cout << "Translation vector from camera to gripper:\n" << t_cam2gripper << endl;return 0;
}运行结果
Rotation matrix from camera to gripper:
[0.7999999999999999, 0.6000000000000001, 0;-0.6000000000000001, 0.7999999999999999, 0;0, 0, 1]
Translation vector from camera to gripper:
[-0.4380000000000001;-0.6659999999999999;-0.63]
相关文章:
OpenCV相机标定与3D重建(10)眼标定函数calibrateHandEye()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 计算手眼标定: g T c _{}^{g}\textrm{T}_c gTc cv::calibrateHandEye 是 OpenCV 中用于手眼标定的函数。该函数通过已知的机器人…...

Hadoop生态圈框架部署(九-2)- Hive HA(高可用)部署
文章目录 前言一、Hive部署(手动部署)下载Hive1. 上传安装包2. 解压Hive安装包2.1 解压2.2 重命名2.3 解决冲突2.3.1 解决guava冲突2.3.2 解决SLF4J冲突 3. 配置Hive3.1 配置Hive环境变量3.2 修改 hive-site.xml 配置文件3.3 配置MySQL驱动包3.3.1 下在M…...

docker 相关操作
1. 以下是一些常见的 Docker 命令: docker --version显示安装的 Docker 版本。 docker pull <image_name>从 Docker Hub 或其他镜像仓库下载镜像。 docker build -t <image_name> <path>从指定路径的 Dockerfile 构建 Docker 镜像。 docker i…...

AI作图效率高,亲测ToDesk、顺网云、青椒云多款云电脑AIGC实践创作
一、引言 随着人工智能生成内容(AIGC)的兴起,越来越多的创作者开始探索高效的文字处理和AI绘图方式,而云电脑也正成为AIGC创作中的重要工具。相比于传统的本地硬件,云电脑在AIGC场景中展现出了显著的优势,…...
;53. 寻宝(kruskal算法))
【代码随想录day57】【C++复健】 53. 寻宝(prim算法);53. 寻宝(kruskal算法)
53. 寻宝(prim算法) 好像在研究生的算法课上学过prim算法和kruskal算法,不过当时只是了解了一下大致的概念和流程,并没有涉及到如何去写代码的部分,今天也算是学习了一下这两个算法的代码应该如何去实现,还…...

C++中多态
1) 什么是多态性?C中如何实现多态? 多态性是指通过基类指针或引用调用派生类的函数,实现不同的行为 多态性可以提高代码的灵活性和可扩展性,使程序能够根据不同的对象类型执行不同的操作。 2)C中如何实现多态&#…...
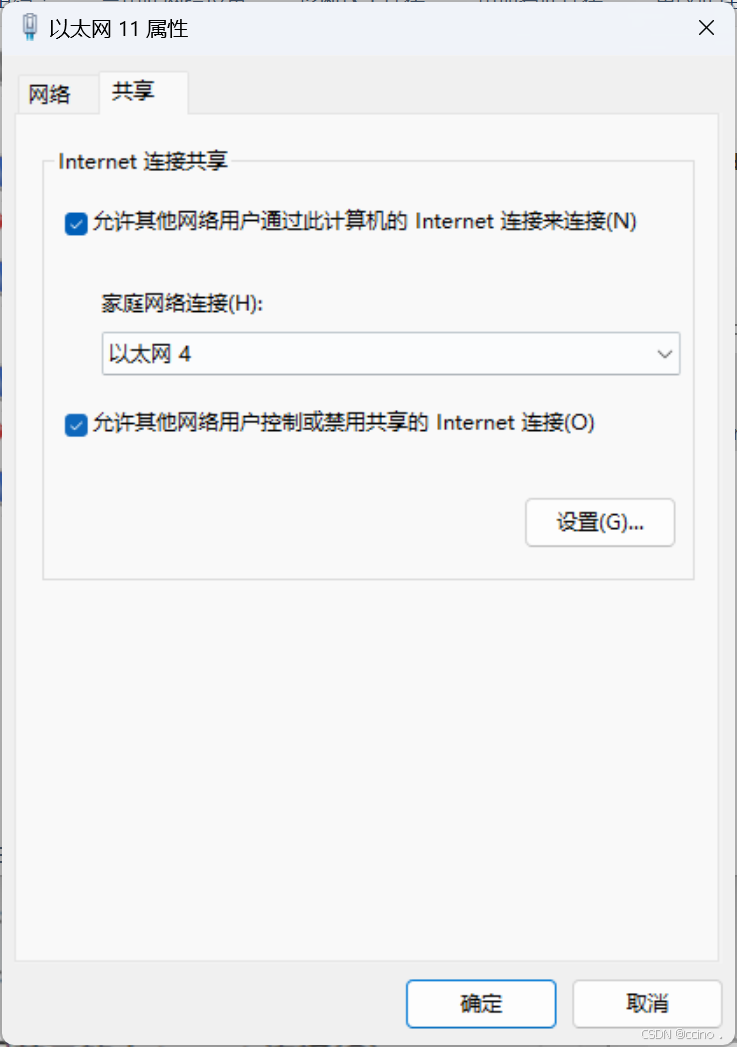
【实现多网卡电脑的网络连接共享】
电脑A配备有两张网卡,分别命名为eth0和eth1(对于拥有超过两张网卡的情况,解决方案相似)。其中,eth0网卡能够连接到Internet,而eth1网卡则通过网线直接与另一台电脑B相连(在实际应用中࿰…...

算力介绍与解析
算力(Computing Power)是指计算机系统在单位时间内处理数据和执行计算任务的能力。算力是衡量计算机性能的重要指标,直接影响计算任务的速度和效率。 算力的分类和单位 a. 基础算力:以CPU的计算能力为主。适用于各个领域的计算。…...
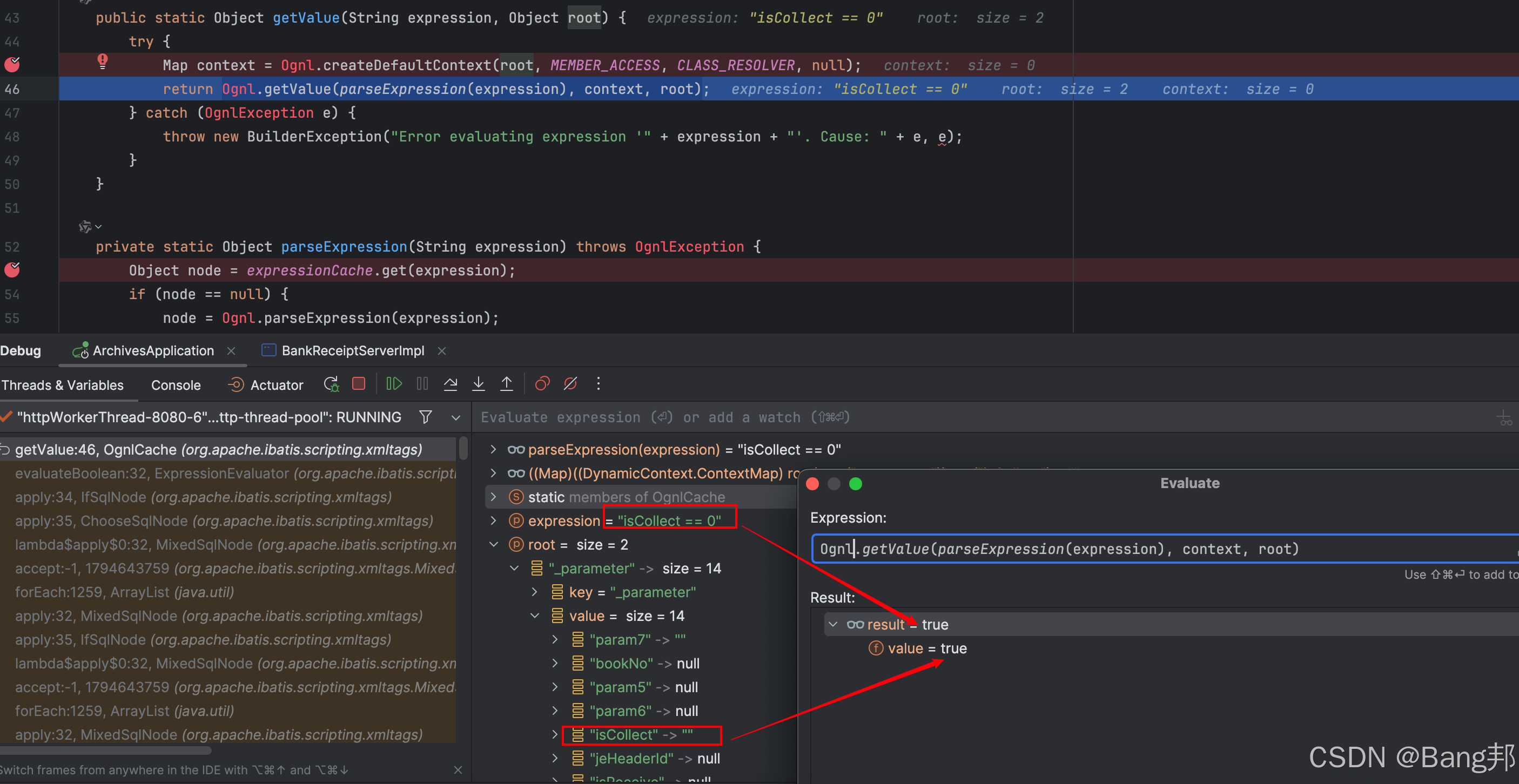
解决 MyBatis 中空字符串与数字比较引发的条件判断错误
问题复现 假设你在 MyBatis 的 XML 配置中使用了如下代码: <if test"isCollect ! null"><choose><when test"isCollect 1">AND exists(select 1 from file_table imgfile2 where task.IMAGE_SEQimgfile2.IMAGE_SEQ and im…...
 解释下)
python 词向量的代码解读 self.word_embeds = nn.Embedding(vocab_size, embedding_dim) 解释下
在PyTorch中,nn.Embedding 是一个用于将稀疏的离散数据表示为密集的嵌入向量的模块。这在自然语言处理(NLP)任务中非常常见,例如在处理单词或字符时,我们通常需要将这些离散的标识符转换为可以被神经网络处理的连续值向…...
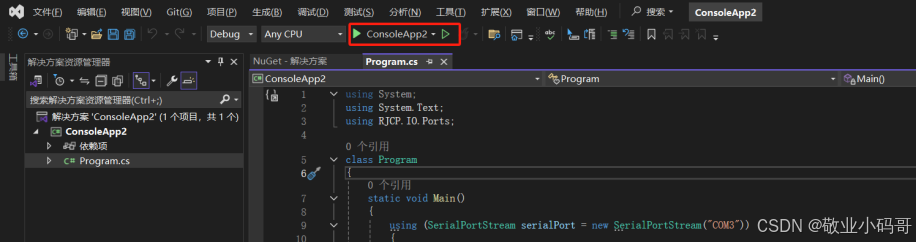
记一次:使用C#创建一个串口工具
前言:公司的上位机打不开串口,发送的时候设备总是关机,因为和这个同事关系比较好,编写这款软件是用C#编写的,于是乎帮着解决了一下(是真解决了),然后整理了一下自己的笔记 一、开发…...

Android Studio新版本的一个资源id无法找到的bug解决
Android Studio新版本的一个资源id无法找到的bug解决 文章目录 Android Studio新版本的一个资源id无法找到的bug解决一、前言二、Android Studio的无法获取到资源id的bug1、一段简单的Java代码1、错误现象2、错误解决方法 三、其他1、小结2、gradle.properties文件 其他相关属性…...
Datawhale AI冬令营(第一期)--零基础定制你的专属大模型
本文主要简述如何快速完成和一些小细节 第一步下载嬛嬛数据集 数据来源:self-llm/dataset/huanhuan.json at master datawhalechina/self-llm GitHub 注意:1.一定是数据集下载完成一定是.json结尾的 2.这个是github的网址,可能会遇到打不开的情况 …...
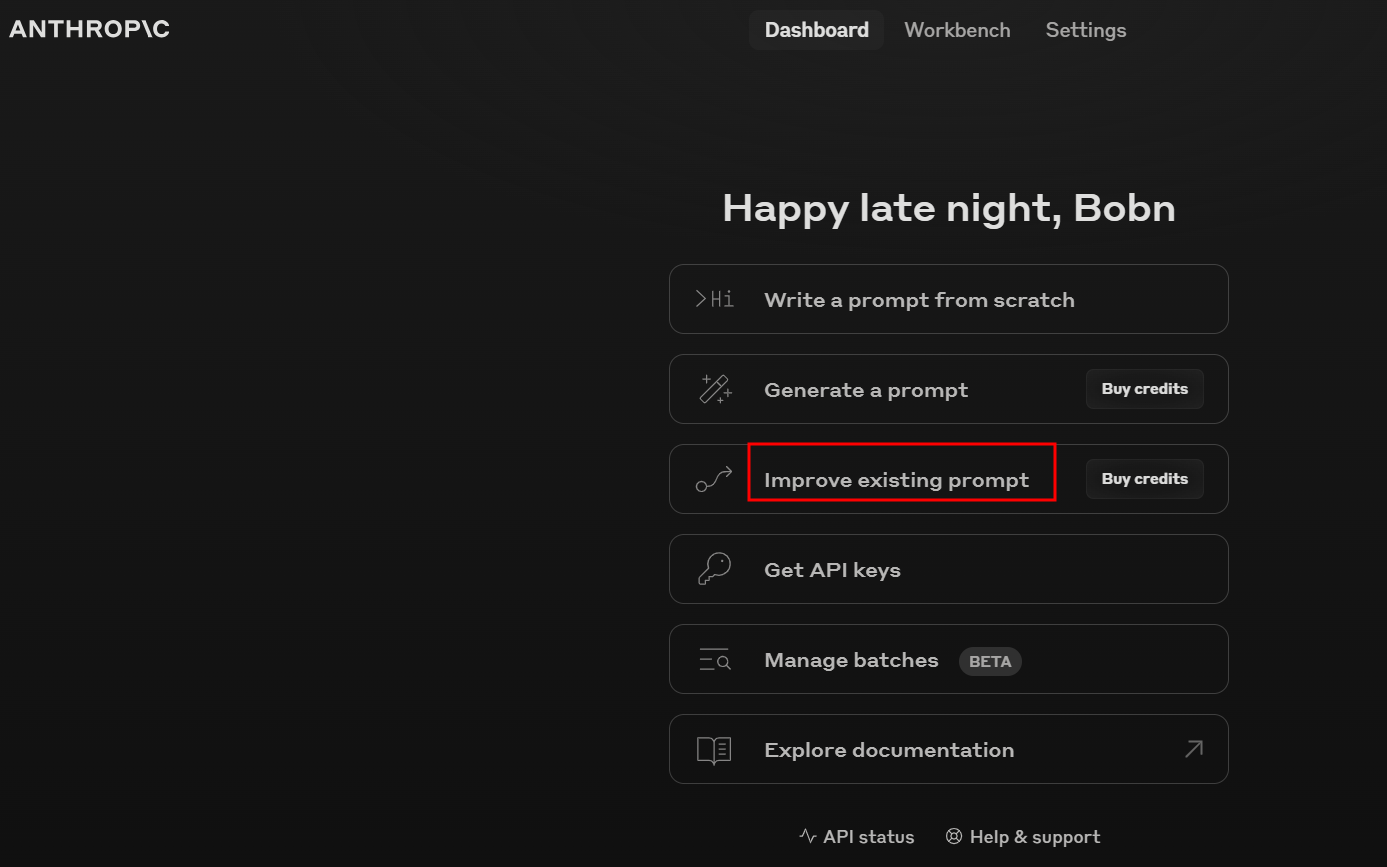
LLMs之APE:基于Claude的Prompt Improver的简介、使用方法、案例应用之详细攻略
LLMs之APE:基于Claude的Prompt Improver的简介、使用方法、案例应用之详细攻略 目录 Prompt Improver的简介 0、背景痛点 1、优势 2、实现思路 Prompt优化 示例管理 提示词评估 Prompt Improver的使用方法 1、使用方法 Prompt Improver的案例应用 1、Kap…...
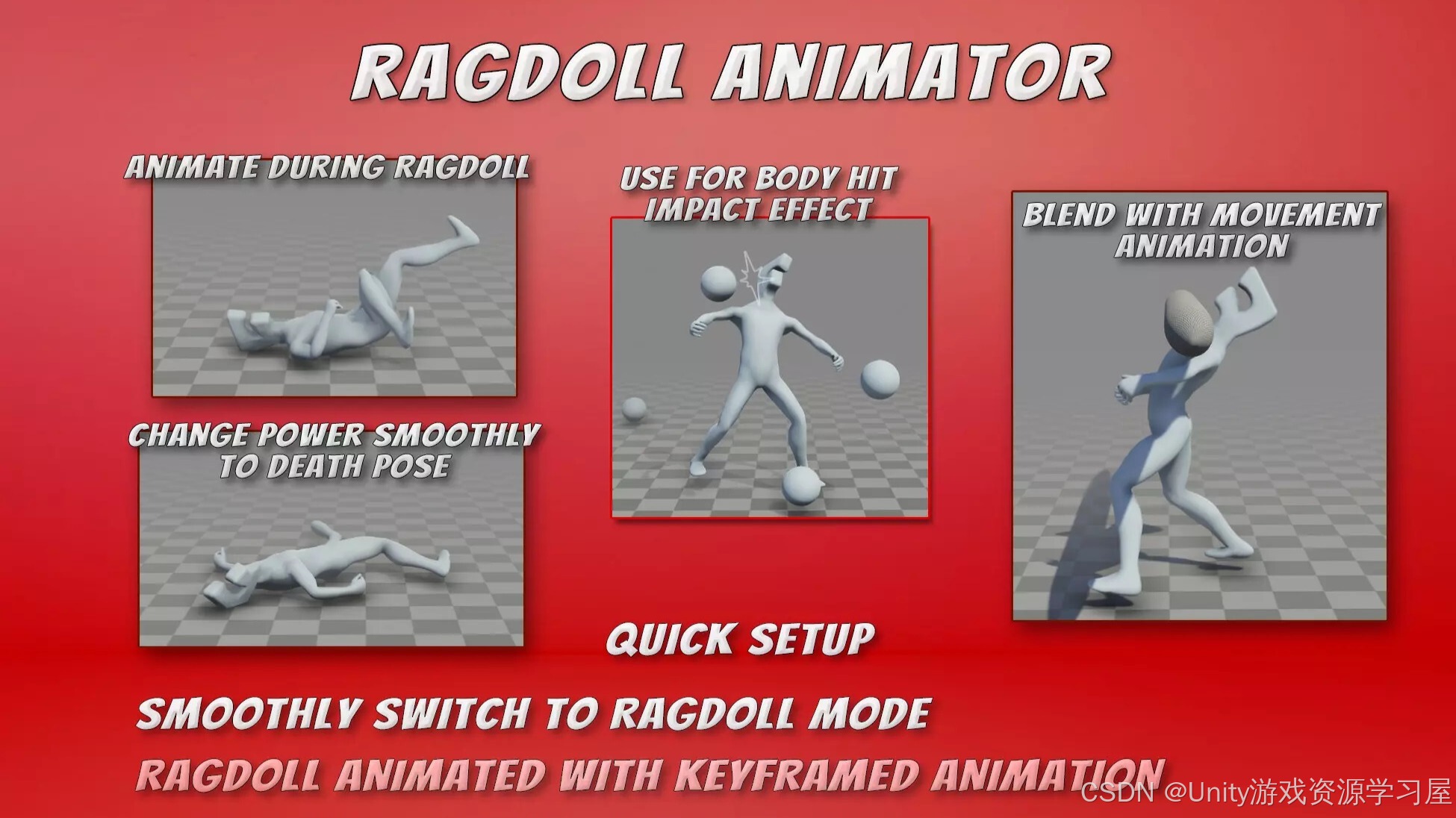
【Unity人形布娃娃插件】Ragdoll Animator
Ragdoll Animator 是一款为 Unity 引擎开发的插件,专注于让角色在运行时动态地切换到布娃娃物理系统(Ragdoll Physics)。该插件帮助开发者轻松创建逼真的角色动画过渡效果,尤其适用于需要角色碰撞、摔倒、受击或其他物理反应的场景…...

跨团队协作中目标一致性至关重要
在团队协作的复杂拼图里,目标一致性是那根贯穿始终的主线,缺之则拼图难成,团队亦难达预期之效。 且看这样一个实例:部门承接了业务方一项紧急的数据处理需求,此任务犹如一座亟待攀登的险峰,落在了 A 团队…...

Excel的文件导入遇到大文件时
Excel的文件导入向导如何把已导入数据排除 入起始行,选择从哪一行开始导入。 比如,前两行已经导入了,第二次导入的时候排除前两行,从第三行开始,就将导入起始行设置为3即可,且不勾选含标题行。 但遇到大文…...

使用字典进行动态编程
在你的程序中,你想要执行各种计算,例如计算卫星的总数。 此外,当你进行更高级的编程时,你可能会发现你需要从文件或数据库中加载此类信息,而不是直接编码到 Python 中。 为了帮助支持这些场景,Python 使你…...

机器学习02-发展历史补充
机器学习02-发展历史补充 文章目录 机器学习02-发展历史补充1-机器学习个人理解1-初始阶段:统计学习和模式识别(20世纪50年代至80年代)2-第二阶段【集成时代】【核方法】(20世纪90年代至2000年代初期)3-第三阶段【特征…...
全国青少年信息学奥林匹克竞赛(信奥赛)备考实战之计数器与累加器(一)
学习背景: 在现实生活中一些需要计数的场景下我们会用到计数器,如空姐手里记录乘客的计数器,跳绳手柄上的计数器等。累加器是累加器求和,以得到最后的结果。计数器和累加器它们虽然是基础知识,但是应用广泛࿰…...
和滚动统计为预测模型打好基础)
你的时间序列真的平稳吗?手把手教你用ADF检验(Dickey-Fuller)和滚动统计为预测模型打好基础
时间序列平稳性诊断实战:从理论到Python实现 时间序列分析中,平稳性检验是建模前的关键步骤。许多经典预测模型(如ARIMA)都建立在数据平稳的假设之上。但现实中的时间序列往往带有趋势或季节性,直接建模会导致预测失效…...

芯片设计中的工程迷信与理性实践:从经验法则到数据驱动
1. 项目概述:从“黑色星期五”迷信到工程设计的理性思考作为一名在电子设计自动化(EDA)和半导体行业摸爬滚打了十几年的工程师,我每天打交道的是精确到纳秒的时序分析、纳米级的物理规则和数以亿计的晶体管布局。在这个世界里&…...

KV缓存压缩技术:IsoQuant在大语言模型中的应用
1. KV缓存压缩的技术背景与挑战在大语言模型(LLM)的推理过程中,键值(KV)缓存的内存占用已成为制约长上下文处理能力的核心瓶颈。以典型的Llama-2 70B模型为例,当处理32k长度的上下文时,KV缓存需…...

为LLM构建持久化知识大脑:基于知识图谱与向量搜索的Memento MCP实战
1. 项目概述:为LLM构建一个持久化、可理解的知识大脑如果你用过Claude Desktop、Cursor或者GitHub Copilot,可能会发现一个痛点:这些AI助手虽然聪明,但它们的“记忆”是短暂的、碎片化的。每次对话都像是一次全新的邂逅࿰…...

KeyMapper终极指南:重新定义Android设备按键功能的完整教程
KeyMapper终极指南:重新定义Android设备按键功能的完整教程 【免费下载链接】KeyMapper An Android app to remap the buttons on your devices 项目地址: https://gitcode.com/gh_mirrors/ke/KeyMapper 你是否曾想过自定义Android设备的按键功能?…...

Ironclaw:基于Rust的现代化命令行工具集,重塑开发效率
1. 项目概述:一个面向开发者的现代化命令行工具集在当今的软件开发工作流中,命令行界面(CLI)依然是开发者与系统、服务交互的核心桥梁。无论是进行本地开发、自动化部署、系统运维还是数据处理,一个高效、可靠、符合直…...

无线广域网技术演进与5G物联网应用解析
1. 无线广域网技术演进全景图作为一名在通信行业深耕十余年的技术专家,我见证了无线广域网(Wireless WAN)从最初的模拟信号传输到如今5G时代的完整演进历程。无线广域网本质上是利用无线电波实现地理分散系统互联的技术集合,其核心价值在于突破有线网络的…...

本地化AI代码助手Refly:从部署到调优的完整实践指南
1. 项目概述:一个面向开发者的AI代码生成与重构工具如果你是一名开发者,无论是前端、后端还是全栈,大概率都经历过这样的场景:面对一个复杂的业务逻辑,或者一段需要重构的祖传代码,你坐在电脑前,…...

同样是投手为什么分析能力相差很大
做广告投放分析能力是核心能力账户常见三个终极问题: 1:不起量 2:成本高 3:量不够简单的说,投手要做的,是从纷繁复杂的账户信息中,整理出有用的数据,并基于它们给出合理的假设&#…...

Taotoken用量看板如何帮助团队精细化管控API成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken用量看板如何帮助团队精细化管控API成本 对于依赖大模型API进行开发的团队而言,成本控制是一个持续存在的挑战…...