OpenCV相机标定与3D重建(18)根据基础矩阵(Fundamental Matrix)校正两组匹配点函数correctMatches()的使用
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
优化对应点的坐标。
cv::correctMatches 是 OpenCV 库中的一个函数,用于根据基础矩阵(Fundamental Matrix)校正两组匹配点。该函数通过最小化重投影误差来优化匹配点的位置,从而提高特征点匹配的准确性。
函数原型
void cv::correctMatches
(InputArray F,InputArray points1,InputArray points2,OutputArray newPoints1,OutputArray newPoints2
)
参数
- 参数F:3x3 的基础矩阵。
- 参数points1:包含第一组点的 1xN 数组。
- 参数points2:包含第二组点的 1xN 数组。
- 参数newPoints1:优化后的第一组点。
- 参数newPoints2:优化后的第二组点。
该函数实现了最优三角化方法(详见《Multiple View Geometry》[115])。对于每个给定的点对应关系points1[i] <-> points2[i] 和一个基础矩阵 F,它计算校正后的对应关系 newPoints1[i] <-> newPoints2[i],以最小化几何误差 d ( p o i n t s 1 [ i ] , n e w P o i n t s 1 [ i ] ) 2 + d ( p o i n t s 2 [ i ] , n e w P o i n t s 2 [ i ] ) 2 d(points1[i], newPoints1[i])^2 + d(points2[i],newPoints2[i])^2 d(points1[i],newPoints1[i])2+d(points2[i],newPoints2[i])2(其中 d ( a , b ) d(a,b) d(a,b) 是点 a 和点 b 之间的几何距离),同时满足极线约束 n e w P o i n t s 2 T ⋅ F ⋅ n e w P o i n t s 1 = 0 newPoints2^T \cdot F \cdot newPoints1 = 0 newPoints2T⋅F⋅newPoints1=0
使用场景
- 立体视觉:在双目或多目视觉系统中,用于提高特征点匹配的精度。
- 结构光扫描:在校正三维重建过程中使用的匹配点时非常有用。
- 运动估计:在基于特征点的运动估计任务中,可以提高估计的准确性。
代码示例
#include <iostream>
#include <opencv2/opencv.hpp>int main()
{// 假设我们已经得到了基础矩阵 F 和两组匹配点 points1 和 points2cv::Mat F = ( cv::Mat_< double >( 3, 3 ) << 0.998, -0.062, 0.007, 0.062, 0.998, -0.05, 0.007, 0.05, 1.0 );// 定义一些匹配点std::vector< cv::Point2f > points1 = { cv::Point2f( 100, 150 ), cv::Point2f( 200, 250 ) };std::vector< cv::Point2f > points2 = { cv::Point2f( 105, 155 ), cv::Point2f( 205, 255 ) };// 创建输出容器std::vector< cv::Point2f > newPoints1;std::vector< cv::Point2f > newPoints2;// 优化对应点的坐标cv::correctMatches( F, points1, points2, newPoints1, newPoints2 );// 打印结果for ( size_t i = 0; i < newPoints1.size(); ++i ){std::cout << "Original Points: (" << points1[ i ].x << ", " << points1[ i ].y << ") -> (" << points2[ i ].x << ", " << points2[ i ].y << ")\n";std::cout << "Optimized Points: (" << newPoints1[ i ].x << ", " << newPoints1[ i ].y << ") -> (" << newPoints2[ i ].x << ", " << newPoints2[ i ].y << ")\n";}return 0;
}
运行结果
Original Points: (100, 150) -> (105, 155)
Optimized Points: (-39.0672, 88.7914) -> (146.107, 75.3975)
Original Points: (200, 250) -> (205, 255)
Optimized Points: (-46.7855, 188.856) -> (259.562, 81.6427)
相关文章:
根据基础矩阵(Fundamental Matrix)校正两组匹配点函数correctMatches()的使用)
OpenCV相机标定与3D重建(18)根据基础矩阵(Fundamental Matrix)校正两组匹配点函数correctMatches()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 优化对应点的坐标。 cv::correctMatches 是 OpenCV 库中的一个函数,用于根据基础矩阵(Fundamental Matrix)校…...
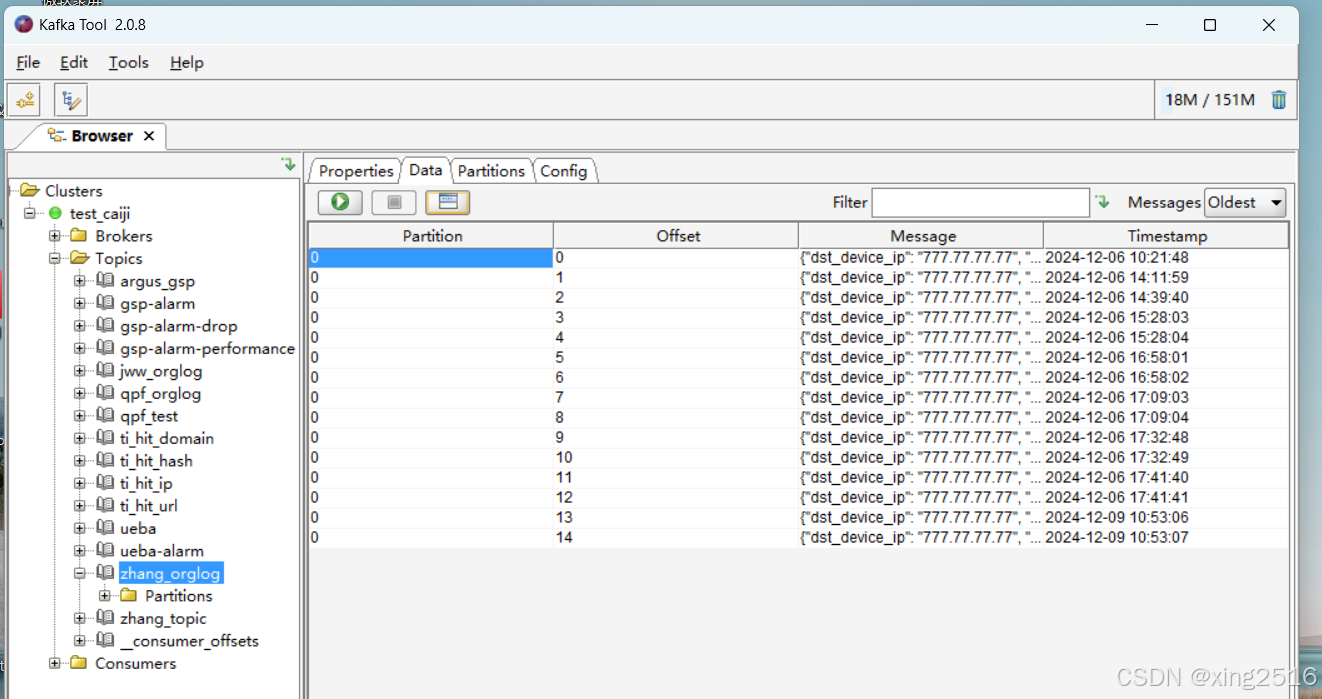
python脚本:向kafka数据库中插入测试数据
# coding:utf-8 import datetime import json import random import timefrom kafka import KafkaProducer生产者demo向branch-event主题中循环写入10条json数据注意事项:要写入json数据需加上value_serializer参数,如下代码producer KafkaProducer(val…...
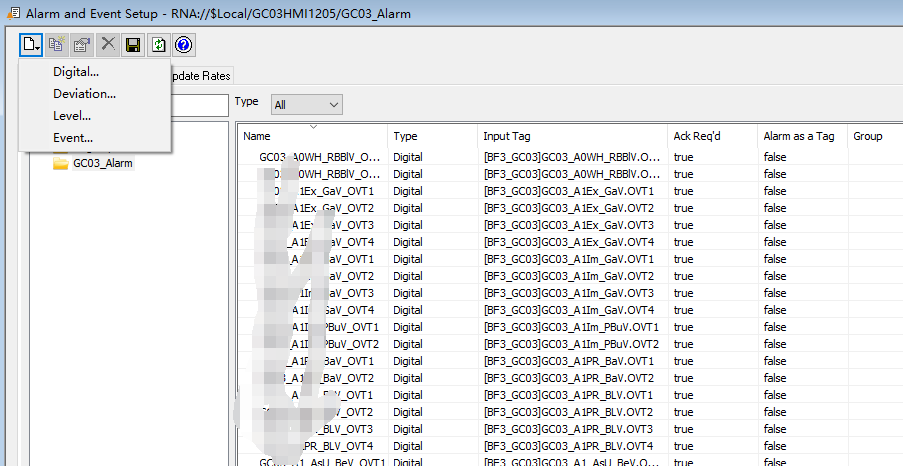
10. 高效利用Excel导入报警信息
高效利用Excel导入报警信息 1.添加报警服务器2.导出报警EXCEL3.报警控件使用1.添加报警服务器 右键项目名称——Add New Sever——Tag Alarm and Event Sever 给报警服务器命名Alarm 给报警服务器分配优先级。如果想要使能历史的话需要和SQL sever配合使用,之前写过。记住这…...

k8s service 配置AWS nlb load_balancing.cross_zone.enabled
在Kubernetes中配置NLB(Network Load Balancer)的跨区域负载均衡(cross-zone load balancing),需要使用服务注解(service annotations)来实现。根据AWS官方文档,以下是配置NLB跨区域…...
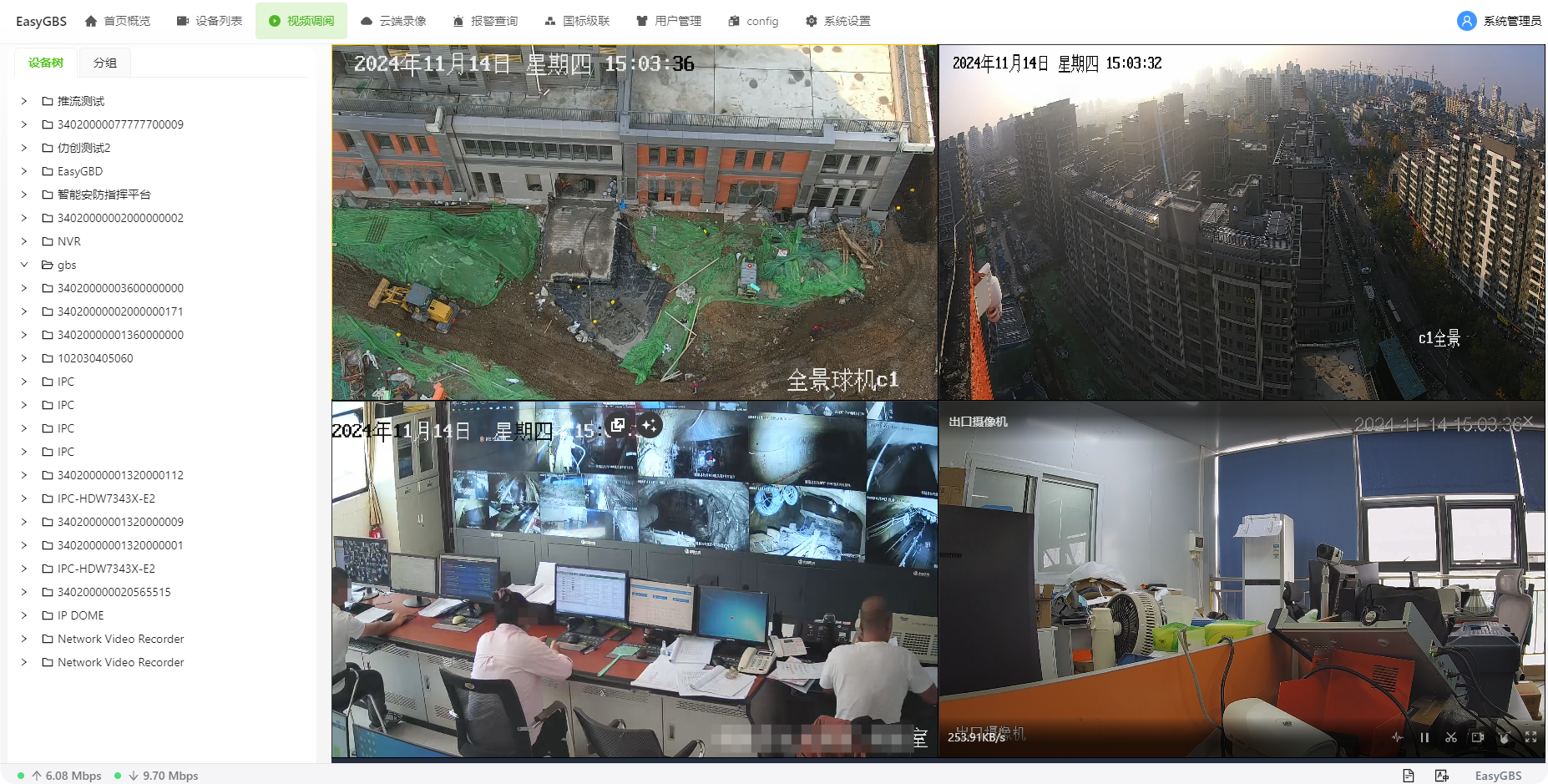
国标GB28181网页直播平台EasyGBS国标GB28181-2016协议解读:媒体流保活机制
GB28181-2016在为视频监控系统提供统一的网络视频传输协议。这项标准主要用于公共安全视频监控系统,支持视频监控设备间的互联互通。其主要应用场景包括城市公共安全监控、交通监控、消防监控等。 GB28181-2016标准中的媒体流保活机制,主要是在确保视频…...

面试经验分享 | 杭州某安全大厂渗透测试岗
目录: 所面试的公司:某安全大厂 所在城市:杭州 面试职位:渗透测试工程师 面试过程: 面试官的问题: 1、面试官开始就问了我,为什么要学网络安全? …...
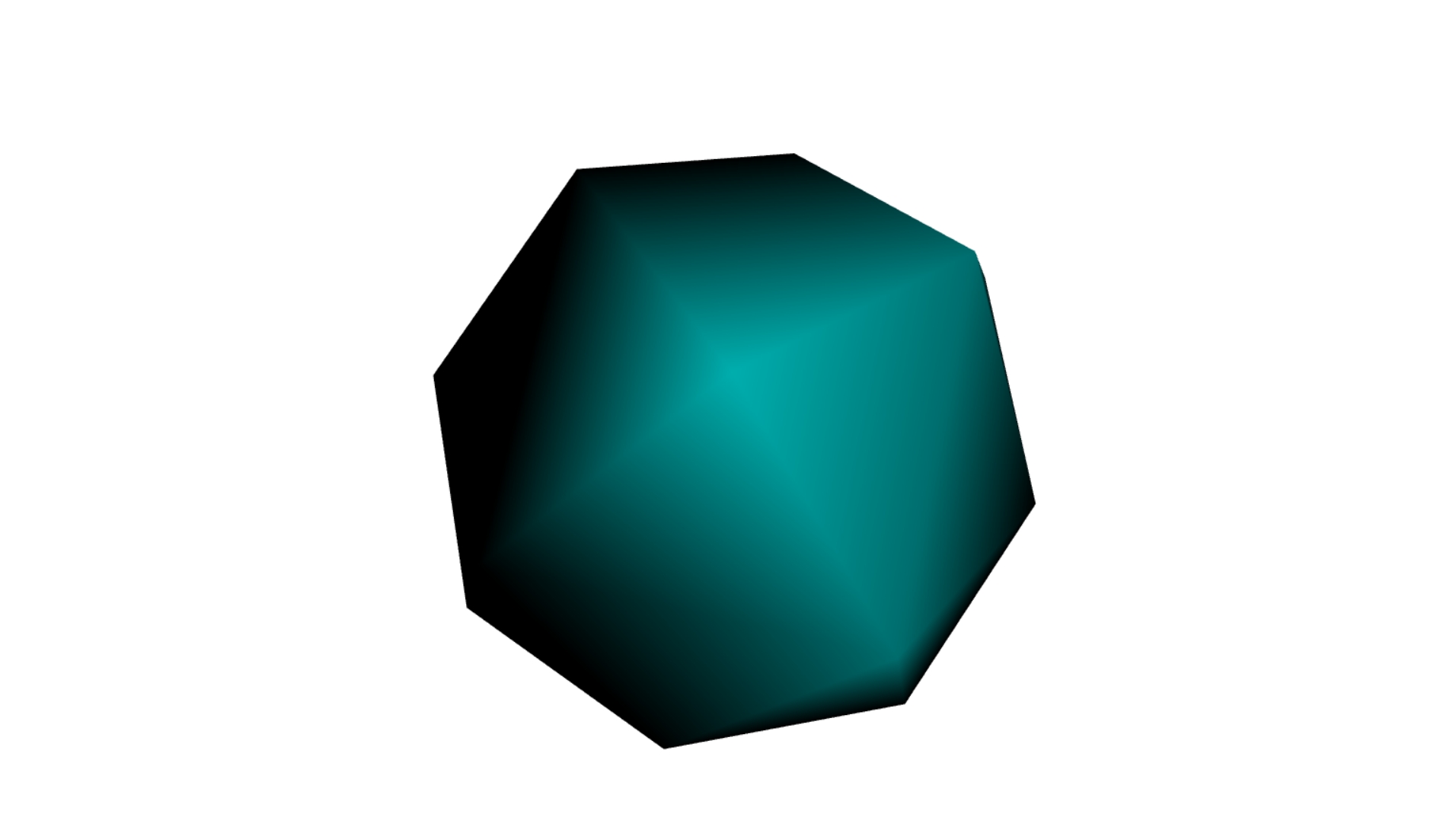
26. Three.js案例-自定义多面体
26. Three.js案例-自定义多面体 实现效果 知识点 WebGLRenderer WebGLRenderer 是 Three.js 中用于渲染场景的主要类。它支持 WebGL 渲染,并提供了多种配置选项。 构造器 new THREE.WebGLRenderer(parameters) 参数类型描述parametersObject可选参数对象&…...

HarmonyOS-高级(四)
文章目录 应用开发安全应用DFX能力介绍HiLog使用指导HiAppEvent 🏡作者主页:点击! 🤖HarmonyOS专栏:点击! ⏰️创作时间:2024年12月11日11点18分 应用开发安全 应用隐私保护 隐私声明弹窗的作…...

Qt-chart 画折线图(以时间为x轴)
上图 代码 #include <iostream> #include <random> #include <qcategoryaxis.h>void MainWindow::testLine() {//1、创建图表视图QChartView* view new QChartView(this);//2.创建图表QChart* chart new QChart();//3.将图表设置给图表视图view->setCh…...

【入门】晶晶的补习班
描述 晶晶上初中了。妈妈认为晶晶应该更加用功学习,所以晶晶除了上学之外,还要参加妈妈为她报名的各科补习班。晶晶的妈妈给了晶晶的下周每天上补习班的小时数,晶晶同学想知道,下周平均一天要上多少小时的补习班(结果…...

c#动态更新替换json节点
需求项目json作为主模板,会应用到多个子模版,当后续项目变更只需要修改主模板中节点,并且能够动态更新到原来的子模版中去。 主模板示例: {"A": {"A1": "","A2": false,"A3"…...
cf补题日记
听退役选手建议,补40道C、D题。 (又又又开新专题。。。 进度:2/40 原题1: You are given a string ss, consisting of digits from 00 to 99. In one operation, you can pick any digit in this string, except for 00 or the…...

Golang学习笔记_01——包
文章目录 包(package)1. 定义2. 导入3. 初始化4. 可见性4. 注意4.1 包声明4.2 main包4.3 包的导入4.4标识符的可见性4.5 包的初始化4.6 避免命名冲突4.7 包的路径和名称4.8 匿名导入4.9 使用Go Modules 包(package) 在Golang&…...
RPC设计--应用层缓冲区,TcpBuffer
为什么需要应用层的buffer 为了方便数据处理,从fd上直接读写然后做包的组装、拆解不够方便方便异步发送,将数据写到应用层buffer后即可返回,让epoll即event_loop去异步发送。提高发送效率,多个小包可合并发送 buffer 设计 可以…...
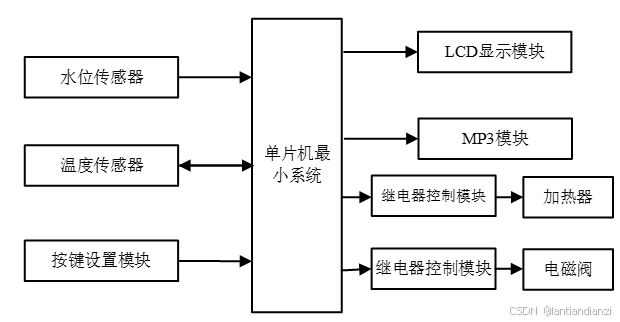
基于单片机智能控制的饮水机控制系统
基于单片机智能控制的饮水机控制系统,以STC89C52单片机为核心,利用防水型DS18B20温度传感器对饮水机内的水温做出检测,其次利用水位传感器对饮水机内的水量做出检测,并显示在OLED液晶显示屏上。用户在使用饮水机时,通过…...
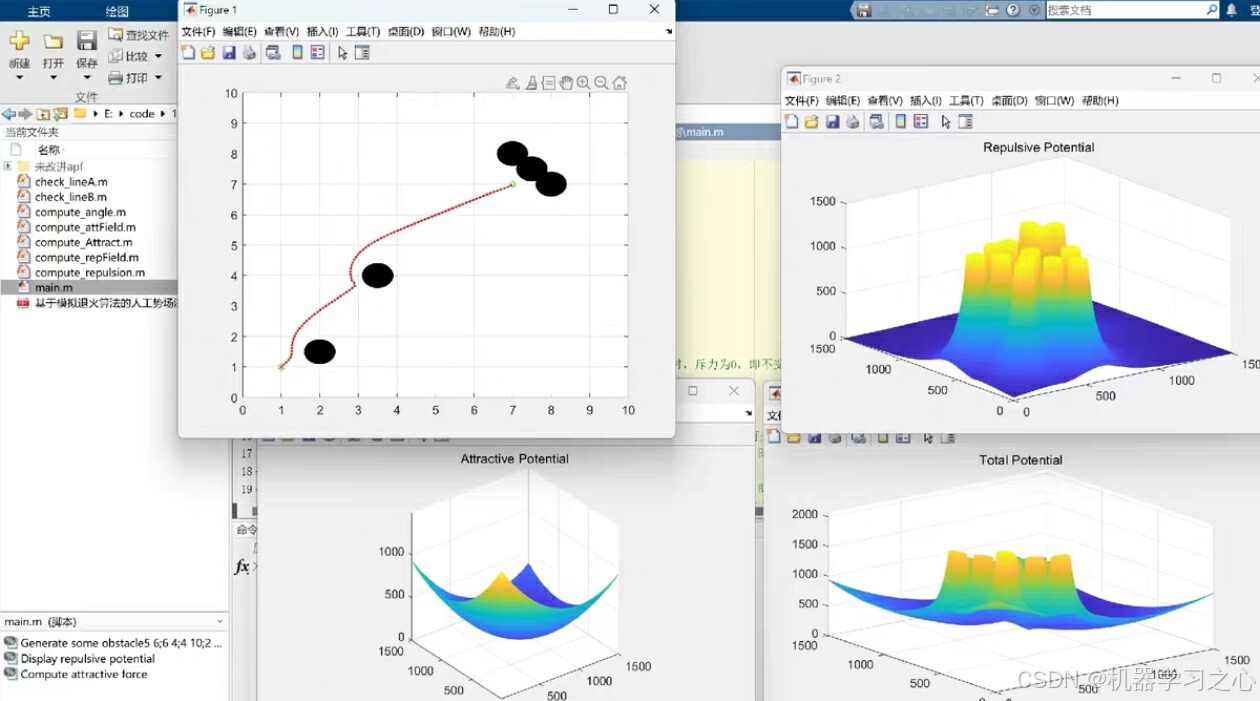
路径规划 | 改进的人工势场法APF算法进行路径规划(Matlab)
目录 效果一览基本介绍程序设计参考文献 效果一览 基本介绍 改进的人工势场法(APF)路径规划算法 在路径规划中,人工势场法(APF)是一种常见的方法,但传统的APF算法容易陷入局部极小值,导致路径规…...

【云原生知识】Kubernets实践-前端服务如何访问后端服务
文章目录 概述步骤1:部署后端服务步骤2:配置Nginx步骤3:创建Nginx服务总结 如何确保 Nginx 能持续访问后端服务?相关文献 概述 假设你正在使用Kubernetes作为容器云平台,以下是如何配置Nginx以及相关服务,…...

【ubuntu18.04】ubuntu18.04安装EasyCwmp操作说明
参考链接 Tutorial – EasyCwmphttps://easycwmp.org/tutorial/ EasyCwmp 介绍 EasyCwmp 设计包括 2 个部分: EasyCwmp 核心:它包括 TR069 CWMP 引擎,负责与 ACS 服务器的通信。它是用 C 语言开发的。EasyCwmp DataModel:它包…...

使用Jackson库的ObjectMapper类将JSON字符串转换为Java的Map对象
本教程展示如何使用Jackson库的ObjectMapper类将JSON字符串转换为Java的Map对象。 下面是具体的步骤和代码示例,包括添加依赖项以及编写用于反序列化JSON字符串为Map的代码。 添加依赖项 首先,在你的项目中添加Jackson库的依赖。如果你使用的是Maven构…...

ASP.NET Core实现鉴权授权的几个库
System.IdentityModel.Tokens.Jwt 和 Microsoft.AspNetCore.Authentication.JwtBearer 是两个常用的库,分别用于处理 JWT(JSON Web Token)相关的任务。它们在功能上有一定重叠,但侧重点和使用场景有所不同。 1. System.IdentityM…...

C++内存可视化利器:silicondawn/memory-viewer库实战指南
1. 项目概述与核心价值最近在调试一个涉及复杂内存操作的C项目时,我又一次陷入了“内存黑盒”的困境。指针指向的数据结构到底对不对?序列化后的字节流里某个字段的值是不是我预期的?手动printf或者断点查看十六进制,效率低不说&a…...

强化学习优化文本生成:从原理到实战,打造可控AI创作工具
1. 项目概述:当强化学习遇上文本生成如果你玩过AI绘画,一定对“提示词工程”不陌生——通过精心设计的文字描述,让模型画出你想要的画面。但你是否想过,这个过程本身也可以被“优化”?比如,你希望模型生成一…...

Clawless框架:构建合规网页数据抓取系统的设计哲学与实践指南
1. 项目概述与核心价值最近在GitHub上闲逛,发现了一个名为“Clawless”的项目,作者是HainanZhao。这个项目名挺有意思,“Clawless”直译是“无爪”,听起来像是一个温和无害的工具。点进去一看,发现它是一个用于自动化处…...

对话式AI智能中继与编排框架:构建高可用AI应用的核心架构
1. 项目概述:一个面向对话式AI的智能中继与编排框架最近在折腾一个挺有意思的开源项目,叫ChatAgentRelay。乍一看这个名字,可能觉得它又是一个聊天机器人框架,但深入把玩之后,我发现它的定位其实更精准,也更…...
基于BLE与NeoPixel的智能眼镜控制:在ATtiny85上实现无线光效交互
1. 项目概述与核心价值几年前,当我第一次把玩Adafruit的NeoPixel灯环时,就被其绚丽的色彩和简单的控制方式所吸引。后来,一个很自然的想法冒了出来:能不能把这些灯珠集成到一副眼镜上,并且用手机来无线控制它ÿ…...

ARM L220 L2缓存控制器架构解析与问题解决方案
1. ARM L220 L2缓存控制器深度解析与问题实战指南作为ARM11系列处理器的关键组件,L220 Level 2 Cache控制器在提升系统性能方面发挥着不可替代的作用。这款发布于2009年的缓存控制器采用当时先进的AXI总线协议,支持多核环境下的缓存一致性管理࿰…...

低延时RS译码器优化设计【附代码】
✨ 长期致力于RS码、低延时、功耗优化、译码器研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)改进型RiBM迭代展开算法加速关键方程求解: …...
)
从命令行到自动化:用xrandr和Bash脚本打造你的Linux多屏工作流(附常用场景脚本)
从命令行到自动化:用xrandr和Bash脚本打造你的Linux多屏工作流 在Linux系统中管理多显示器配置,xrandr无疑是最强大的命令行工具之一。但每次手动输入复杂的xrandr命令来调整显示器布局,对于追求效率的高级用户来说,无疑是一种时间…...

达梦数据库主备集群手工搭建及主备切换演练
环境:DM8、Linux(CentOS 7 ),三台服务器。 本文记录从零搭一套"一主一备一监视" 式的主备集群,纯手工操作,不依赖图形化工具。 一、环境规划 1.1 IP规划 角色主机名业务IP心跳IP实例名主库&…...

语音提示工程实战:从原理到应用,解锁AI声音表现力
1. 项目概述:语音提示工程的“Awesome”宝库如果你正在探索语音AI的应用,或者想为自己的智能助手、播客、有声书项目寻找更自然、更具表现力的声音,那么你很可能已经意识到一个核心痛点:如何用文字精准地“指挥”一个AI声音&#…...