Gmsh有限元网格剖分(Python)---点、直线、平面的移动
Gmsh有限元网格剖分(Python)—点、直线、平面的移动和旋转
最近在学习有限元的网格剖分算法,主要还是要参考老外的开源Gmsh库进行,写一些博客记录下学习过程,方便以后回忆嘞。
Gmsh的官方英文文档可以参考:gmsh.pdf
但咋就说,这里面东西太多了,不太适合初学者去看,因此分享下自己学习的过程吧。
此次记录基于下面博客的内容:
Gmsh有限元网格剖分(Python)—任意点、直线、平面的创建
目录
- Gmsh有限元网格剖分(Python)---点、直线、平面的移动和旋转
- 1、点、直线、平面的移动
- 1.1 点的移动
- 1.2 线的移动
- 1.3 面的移动
- 1.4 总结
- 2、点、直线、平面的旋转
- 2.1、点的旋转
- 2.2、线的旋转
- 2.3、线的旋转-旋转图形中的线
- 2.4、面的旋转
1、点、直线、平面的移动
1.1 点的移动
在Gmsh有限元网格剖分(Python)—任意点、直线、平面的创建的代码中额外创建一个点并连线:
point5_tag = kernel.addPoint(1, 2, 0, meshSize=mesh_size)
line5_tag = kernel.addLine(point4_tag, point5_tag)
绘制得到的结果如下:

使用下面的命令对新创建的点进行平移,其中:
------ [(0, point5_tag)]:0是代表移动的是0维的点,point5_tag是要移动的点的编号
------dx、dy、dz是向各个方向平移的距离
kernel.translate([(0, point5_tag)], dx=1, dy=0, dz=0)
geo引擎
如果我们使用gmsh自带的kernel = gmsh.model.geo引擎,可以看到平移后的线依旧连接,创建的线会和点一起移动:

occ引擎
如果我们使用Open CASCADE的kernel = gmsh.model.occ引擎,可以看到平移后的线不动,只移动单个点:

全部代码:
import mathimport gmsh
import sysgmsh.initialize()
# 新建模型,命名为t1,t1指的是整个结构
gmsh.model.add("my_t2")kernel = gmsh.model.geo
mesh_size = 5e-1
point1_tag = kernel.addPoint(0, 0, 0, meshSize=mesh_size)
point2_tag = kernel.addPoint(0, 1, 0, meshSize=mesh_size)
point3_tag = kernel.addPoint(1, 0, 0, meshSize=mesh_size)
point4_tag = kernel.addPoint(1, 1, 0, meshSize=mesh_size)
line1_tag = kernel.addLine(point1_tag, point2_tag)
line2_tag = kernel.addLine(point2_tag, point4_tag)
line3_tag = kernel.addLine(point4_tag, point3_tag)
line4_tag = kernel.addLine(point3_tag, point1_tag)
curve_loop_tag = kernel.addCurveLoop([line1_tag, line2_tag, line3_tag, line4_tag])
surface_tag = kernel.addPlaneSurface([curve_loop_tag])point5_tag = kernel.addPoint(1, 2, 0, meshSize=mesh_size)
line5_tag = kernel.addLine(point4_tag, point5_tag)kernel.translate([(0, point5_tag)], dx=1, dy=0, dz=0)# GMSH模型同步
kernel.synchronize()
# 创建点集合,命名为My point
gmsh.model.addPhysicalGroup(2, [surface_tag], name="My Surface")# 2维网格剖分
gmsh.model.mesh.generate(2)
# 保存一下
gmsh.write("my_t1.msh")
# 默认启动gui界面
if '-nopopup' not in sys.argv:gmsh.fltk.run()
# 结束gmsh
gmsh.finalize()1.2 线的移动
线的移动基于同样的函数,其解释和代码如下:
------ [(1, line5_tag)]:1是代表移动的是1维的线,line5_tag是要移动的点的编号
------dx、dy、dz是向各个方向平移的距离
kernel.translate([(1, line5_tag)], dx=1, dy=0, dz=0)
occ引擎
如果我们使用Open CASCADE的kernel = gmsh.model.occ引擎,可以看到实际中线被平移了:

geo引擎
如果我们使用gmsh自带的kernel = gmsh.model.geo引擎,线的移动会改变原有的和线连接的结构,总之就是结构全部耦合在一块了:

全部代码:
import mathimport gmsh
import sysgmsh.initialize()
# 新建模型,命名为t1,t1指的是整个结构
gmsh.model.add("my_t2")kernel = gmsh.model.geo
mesh_size = 5e-1
point1_tag = kernel.addPoint(0, 0, 0, meshSize=mesh_size)
point2_tag = kernel.addPoint(0, 1, 0, meshSize=mesh_size)
point3_tag = kernel.addPoint(1, 0, 0, meshSize=mesh_size)
point4_tag = kernel.addPoint(1, 1, 0, meshSize=mesh_size)
line1_tag = kernel.addLine(point1_tag, point2_tag)
line2_tag = kernel.addLine(point2_tag, point4_tag)
line3_tag = kernel.addLine(point4_tag, point3_tag)
line4_tag = kernel.addLine(point3_tag, point1_tag)
curve_loop_tag = kernel.addCurveLoop([line1_tag, line2_tag, line3_tag, line4_tag])
surface_tag = kernel.addPlaneSurface([curve_loop_tag])point5_tag = kernel.addPoint(1, 2, 0, meshSize=mesh_size)
line5_tag = kernel.addLine(point4_tag, point5_tag)kernel.translate([(1, line5_tag)], dx=1, dy=0, dz=0)# GMSH模型同步
kernel.synchronize()
# 创建点集合,命名为My point
gmsh.model.addPhysicalGroup(2, [surface_tag], name="My Surface")# 2维网格剖分
gmsh.model.mesh.generate(2)
# 保存一下
gmsh.write("my_t1.msh")
# 默认启动gui界面
if '-nopopup' not in sys.argv:gmsh.fltk.run()
# 结束gmsh
gmsh.finalize()1.3 面的移动
面的移动基于同样的函数,其解释和代码如下(将平面向上移动):
------ [(2, surface_tag)]:2是代表移动的是2维的面,surface_tag是要移动的面的编号
------dx、dy、dz是向各个方向平移的距离
kernel.translate([(2, surface_tag)], dx=0, dy=0, dz=1)
occ引擎
如果我们使用Open CASCADE的kernel = gmsh.model.occ引擎,可以看到实际中单独的这个面被平移了,其余结构没有变化:

geo引擎
如果我们使用gmsh自带的kernel = gmsh.model.geo引擎,面的移动会改变原有的和线连接的结构:

代码:
import mathimport gmsh
import sysgmsh.initialize()
# 新建模型,命名为t1,t1指的是整个结构
gmsh.model.add("my_t2")kernel = gmsh.model.geo
mesh_size = 5e-1
point1_tag = kernel.addPoint(0, 0, 0, meshSize=mesh_size)
point2_tag = kernel.addPoint(0, 1, 0, meshSize=mesh_size)
point3_tag = kernel.addPoint(1, 0, 0, meshSize=mesh_size)
point4_tag = kernel.addPoint(1, 1, 0, meshSize=mesh_size)
line1_tag = kernel.addLine(point1_tag, point2_tag)
line2_tag = kernel.addLine(point2_tag, point4_tag)
line3_tag = kernel.addLine(point4_tag, point3_tag)
line4_tag = kernel.addLine(point3_tag, point1_tag)
curve_loop_tag = kernel.addCurveLoop([line1_tag, line2_tag, line3_tag, line4_tag])
surface_tag = kernel.addPlaneSurface([curve_loop_tag])point5_tag = kernel.addPoint(1, 2, 0, meshSize=mesh_size)
line5_tag = kernel.addLine(point4_tag, point5_tag)kernel.translate([(2, surface_tag)], dx=0, dy=0, dz=1)# GMSH模型同步
kernel.synchronize()
# 创建点集合,命名为My point
gmsh.model.addPhysicalGroup(2, [surface_tag], name="My Surface")# 2维网格剖分
gmsh.model.mesh.generate(2)
# 保存一下
gmsh.write("my_t1.msh")
# 默认启动gui界面
if '-nopopup' not in sys.argv:gmsh.fltk.run()
# 结束gmsh
gmsh.finalize()1.4 总结
kernel = gmsh.model.geo时对形状的编辑耦合比较严重
kernel = gmsh.model.occ时各个图形隔离度高,推荐使用occ引擎
2、点、直线、平面的旋转
2.1、点的旋转
使用下面的函数进行旋转:
kernel.rotate([(0, point5_tag)], 1, 1, 0, 0, 0, 1, -math.pi / 2)
其中:
------ [(0, point5_tag)]:0是代表移动的是0维的点,point5_tag是要移动的点的编号
------1, 1, 0参数代表旋转选择的中心点在坐标(1,1,0)
------0, 0, 1参数代表选择所绕的轴是Z轴
------(-math.pi / 2)参数表示是顺时针旋转90°
occ引擎
如果我们使用Open CASCADE的kernel = gmsh.model.occ引擎,可以看到只有点被旋转过去了:

geo引擎
如果我们使用gmsh自带的kernel = gmsh.model.geo引擎,可以看到点和点所在的线全部被旋转了:

全部代码:
import mathimport gmsh
import sysgmsh.initialize()
# 新建模型,命名为t1,t1指的是整个结构
gmsh.model.add("my_t2")kernel = gmsh.model.geo
mesh_size = 5e-1
point1_tag = kernel.addPoint(0, 0, 0, meshSize=mesh_size)
point2_tag = kernel.addPoint(0, 1, 0, meshSize=mesh_size)
point3_tag = kernel.addPoint(1, 0, 0, meshSize=mesh_size)
point4_tag = kernel.addPoint(1, 1, 0, meshSize=mesh_size)
line1_tag = kernel.addLine(point1_tag, point2_tag)
line2_tag = kernel.addLine(point2_tag, point4_tag)
line3_tag = kernel.addLine(point4_tag, point3_tag)
line4_tag = kernel.addLine(point3_tag, point1_tag)
curve_loop_tag = kernel.addCurveLoop([line1_tag, line2_tag, line3_tag, line4_tag])
surface_tag = kernel.addPlaneSurface([curve_loop_tag])point5_tag = kernel.addPoint(1, 2, 0, meshSize=mesh_size)
line5_tag = kernel.addLine(point4_tag, point5_tag)kernel.rotate([(0, point5_tag)], 1, 1, 0, 0, 0, 1, -math.pi / 2)# GMSH模型同步
kernel.synchronize()
# 创建点集合,命名为My point
gmsh.model.addPhysicalGroup(2, [surface_tag], name="My Surface")# 2维网格剖分
gmsh.model.mesh.generate(2)
# 保存一下
gmsh.write("my_t1.msh")
# 默认启动gui界面
if '-nopopup' not in sys.argv:gmsh.fltk.run()
# 结束gmsh
gmsh.finalize()
2.2、线的旋转
使用下面的函数进行旋转:
kernel.rotate([(1, line5_tag)], 1, 1, 0, 0, 0, 1, -math.pi / 2)
其中:
------ [(1, line5_tag)]:1是代表移动的是1维的线,line5_tag是要移动的线的编号
------1, 1, 0参数代表旋转选择的中心点在坐标(1,1,0)
------0, 0, 1参数代表选择所绕的轴是Z轴
------(-math.pi / 2)参数表示是顺时针旋转90°
occ引擎
如果我们使用Open CASCADE的kernel = gmsh.model.occ引擎,可以看到线和线上的点被成功旋转90°:

geo引擎
如果我们使用gmsh自带的kernel = gmsh.model.geo引擎,可以看到线和线上的点被成功旋转90°,此时使用两个3维引擎效果是一致的:

全部代码:
import mathimport gmsh
import sysgmsh.initialize()
# 新建模型,命名为t1,t1指的是整个结构
gmsh.model.add("my_t2")kernel = gmsh.model.geo
mesh_size = 5e-1
point1_tag = kernel.addPoint(0, 0, 0, meshSize=mesh_size)
point2_tag = kernel.addPoint(0, 1, 0, meshSize=mesh_size)
point3_tag = kernel.addPoint(1, 0, 0, meshSize=mesh_size)
point4_tag = kernel.addPoint(1, 1, 0, meshSize=mesh_size)
line1_tag = kernel.addLine(point1_tag, point2_tag)
line2_tag = kernel.addLine(point2_tag, point4_tag)
line3_tag = kernel.addLine(point4_tag, point3_tag)
line4_tag = kernel.addLine(point3_tag, point1_tag)
curve_loop_tag = kernel.addCurveLoop([line1_tag, line2_tag, line3_tag, line4_tag])
surface_tag = kernel.addPlaneSurface([curve_loop_tag])point5_tag = kernel.addPoint(1, 2, 0, meshSize=mesh_size)
line5_tag = kernel.addLine(point4_tag, point5_tag)kernel.rotate([(1, line5_tag)], 1, 1, 0, 0, 0, 1, -math.pi / 2)# GMSH模型同步
kernel.synchronize()
# 创建点集合,命名为My point
gmsh.model.addPhysicalGroup(2, [surface_tag], name="My Surface")# 2维网格剖分
gmsh.model.mesh.generate(2)
# 保存一下
gmsh.write("my_t1.msh")
# 默认启动gui界面
if '-nopopup' not in sys.argv:gmsh.fltk.run()
# 结束gmsh
gmsh.finalize()2.3、线的旋转-旋转图形中的线
但是,上面我们旋转的线是单独的一根独立的线,如果我们选择旋转现有的构成图形的线,两个引擎会不会有什么区别呢?旋转的目标是下面这个,我们想将其逆时针旋转90°:

occ引擎-实际上是复制并旋转,这是为了保持原结构不变:

geo引擎-原来边的对应关系也全部改变了,逻辑关系比较复杂:

代码:
import mathimport gmsh
import sysgmsh.initialize()
# 新建模型,命名为t1,t1指的是整个结构
gmsh.model.add("my_t2")kernel = gmsh.model.geo
mesh_size = 5e-1
point1_tag = kernel.addPoint(0, 0, 0, meshSize=mesh_size)
point2_tag = kernel.addPoint(0, 1, 0, meshSize=mesh_size)
point3_tag = kernel.addPoint(1, 0, 0, meshSize=mesh_size)
point4_tag = kernel.addPoint(1, 1, 0, meshSize=mesh_size)
line1_tag = kernel.addLine(point1_tag, point2_tag)
line2_tag = kernel.addLine(point2_tag, point4_tag)
line3_tag = kernel.addLine(point4_tag, point3_tag)
line4_tag = kernel.addLine(point3_tag, point1_tag)
curve_loop_tag = kernel.addCurveLoop([line1_tag, line2_tag, line3_tag, line4_tag])
surface_tag = kernel.addPlaneSurface([curve_loop_tag])point5_tag = kernel.addPoint(1, 2, 0, meshSize=mesh_size)
line5_tag = kernel.addLine(point4_tag, point5_tag)kernel.rotate([(1, line2_tag)], 0, 1, 0, 0, 0, 1, math.pi / 2)# GMSH模型同步
kernel.synchronize()
# 创建点集合,命名为My point
gmsh.model.addPhysicalGroup(2, [surface_tag], name="My Surface")# 2维网格剖分
# gmsh.model.mesh.generate(2)
# 保存一下
gmsh.write("my_t1.msh")
# 默认启动gui界面
if '-nopopup' not in sys.argv:gmsh.fltk.run()
# 结束gmsh
gmsh.finalize()2.4、面的旋转
使用下面的函数进行旋转:
kernel.rotate([(2, surface_tag)], 0, 0, 0, 0, 0, 1, math.pi / 4)
其中:
------ [(2, surface_tag)]:1是代表移动的是2维的面,surface_tag是要移动的面的编号
------0, 0 0参数代表旋转选择的中心点在坐标(0,0,0)
------0, 0, 1参数代表选择所绕的轴是Z轴
------(math.pi / 4)参数表示是逆时针旋转45°
occ引擎-可以看到原来的正方形向左滚了45°,但是线的位置不变:

geo引擎-可以看到原来的正方形向左滚了45°,且那线也跟着一起走了,结构是耦合的:

代码:
import mathimport gmsh
import sysgmsh.initialize()
# 新建模型,命名为t1,t1指的是整个结构
gmsh.model.add("my_t2")kernel = gmsh.model.geo
mesh_size = 5e-1
point1_tag = kernel.addPoint(0, 0, 0, meshSize=mesh_size)
point2_tag = kernel.addPoint(0, 1, 0, meshSize=mesh_size)
point3_tag = kernel.addPoint(1, 0, 0, meshSize=mesh_size)
point4_tag = kernel.addPoint(1, 1, 0, meshSize=mesh_size)
line1_tag = kernel.addLine(point1_tag, point2_tag)
line2_tag = kernel.addLine(point2_tag, point4_tag)
line3_tag = kernel.addLine(point4_tag, point3_tag)
line4_tag = kernel.addLine(point3_tag, point1_tag)
curve_loop_tag = kernel.addCurveLoop([line1_tag, line2_tag, line3_tag, line4_tag])
surface_tag = kernel.addPlaneSurface([curve_loop_tag])point5_tag = kernel.addPoint(1, 2, 0, meshSize=mesh_size)
line5_tag = kernel.addLine(point4_tag, point5_tag)kernel.rotate([(2, surface_tag)], 0, 0, 0, 0, 0, 1, math.pi / 4)# GMSH模型同步
kernel.synchronize()
# 创建点集合,命名为My point
gmsh.model.addPhysicalGroup(2, [surface_tag], name="My Surface")# 2维网格剖分
# gmsh.model.mesh.generate(2)
# 保存一下
gmsh.write("my_t1.msh")
# 默认启动gui界面
if '-nopopup' not in sys.argv:gmsh.fltk.run()
# 结束gmsh
gmsh.finalize()相关文章:
Gmsh有限元网格剖分(Python)---点、直线、平面的移动
Gmsh有限元网格剖分(Python)—点、直线、平面的移动和旋转 最近在学习有限元的网格剖分算法,主要还是要参考老外的开源Gmsh库进行,写一些博客记录下学习过程,方便以后回忆嘞。 Gmsh的官方英文文档可以参考:gmsh.pdf 但咋就说&a…...

山景BP1048增加AT指令,实现单片机串口控制播放音乐(一)
1、设计目的 山景提供的SDK是蓝牙音箱demo,用户使用ADC按键或者IR遥控器,进行人机交互。然而现实很多场景,需要和单片机通信,不管是ADC按键或者IR接口都不适合和单片机通信。这里设计个AT指令用来和BP1048通信。AT指令如下图所示…...

SMMU软件指南SMMU编程之全局错误和最小配置
安全之安全(security)博客目录导读 目录 一、全局错误 二、最小配置 一、全局错误 与编程接口相关的全局错误会报告到适当的 SMMU_(*_)GERROR 寄存器,而不是通过基于内存的事件队列。这些错误通常是严重的,例如导致 SMMU 停止向前推进。例如…...

CPU条件下Pytorch、jupyter环境配置
一、创建虚拟环境 查看虚拟环境 conda env list 创建python虚拟环境 conda create -n minist python3.11 激活虚拟环境 conda activate minist 查看虚拟环境下有哪些包 pip list 二、安装pytorch 切换清华源 conda config --add channels https://mirrors.tuna.tsing…...

【自用】通信内网部署rzgxxt项目_01,后端pipeDemo部署(使用nssm.exe仿照nohup)
做完这些工作之后,不要忘记打开 Windows Server 的防火墙端口,8181、8081、8080、22、443、1521 做完这些工作之后,不要忘记打开 Windows Server 的防火墙端口,8181、8081、8080、22、443、1521 做完这些工作之后,不要…...

Ubuntu 安装实时内核指南
在运行需要高精度和低延迟响应的机器人驱动程序时,安装一个具备实时内核(Real-Time Kernel)的 Ubuntu 系统是至关重要的。若缺乏实时系统的支持,高频率的控制指令可能会导致机器人运动轨迹不流畅,甚至产生抖动现象。以…...

MySQL 主从复制与高可用
在现代分布式系统中,数据库的高可用性和可靠性至关重要。MySQL 提供了主从复制(Master-Slave Replication)机制来实现数据的冗余和容错,保证在主数据库发生故障时能够继续提供服务。而在此基础上,通过进一步的高可用架…...
RCE总结
文章目录 常见漏洞执行函数:1.系统命令执行函数2.代码执行函数 命令拼接符读取文件命令绕过:空格过滤绕过关键字绕过长度过滤绕过无参数命令执行绕过无字母数字绕过利用%0A截断利用回溯绕过利用create_function()代码注入无回显RCE1.反弹shell2.dnslog外…...

基于UNITY3D的照片墙演示项目技术分享
unity实现超大图片墙演示,由于拥有海量图片,使用了CPU 多线程,unity dots技术,图片组成文字部分,使用了点阵图技术,提取文字像素。 (关于点阵介绍) 点阵字体是把每一个字符都分成1616或2424个点…...

随手记:小程序兼容后台的wangEditor富文本配置链接
场景: 在后台配置wangEditor富文本,可以文字配置链接,图片配置链接,产生的json格式为: 例子: <h1><a href"https://uniapp.dcloud.net.cn/" target"_blank"><span sty…...

maven项目运行时NoSuchMethodError问题排查记录(依赖冲突解决)
控制台异常如下: Handler dispatch failed; nested exception is java.lang.NoSuchMethodError: org.apache.commons.io.input.BoundedInputStream.builder()Lorg/apache/commons/io/input/BoundedInputStream$Builder;问题明显,根据NoSuchMethodError…...

ECharts关系图-关系图11,附视频讲解与代码下载
引言: 关系图(或称网络图、关系网络图)在数据可视化中扮演着至关重要的角色。它们通过节点(代表实体,如人、物体、概念等)和边(代表实体之间的关系或连接)的形式,直观地…...

【C语言】动态内存管理:详解malloc和free函数
前言 在C语言编程中,动态内存分配是一个非常重要的概念。与静态内存分配不同,动态内存分配允许程序在运行时根据需要分配和释放内存,从而更加灵活地管理内存资源。特别是在一些数据结构的引用中经常需要使用,下面我们就详细讲解一…...

EGO Swarm翻译
目录 摘要 Ⅰ 介绍 Ⅱ 相关工作 A . 单四旋翼局部规划 B . 拓扑规划 C. 分布式无人机集群 Ⅲ 基于梯度的局部规划隐式拓扑轨迹生成 A.无需ESDF梯度的局部路径规划 B.隐式拓扑轨迹生成 Ⅳ 无人机集群导航 A 机间避碰 B. 定位漂移补偿 C. 从深度图像中去除agent Ⅴ …...

Linux根目录
在Linux系统中,文件系统遵循一种标准化的目录结构,即文件系统层次结构标准(Filesystem Hierarchy Standard,FHS)。 根目录(/) /bin:包含二进制可执行文件,通常是用户和系…...
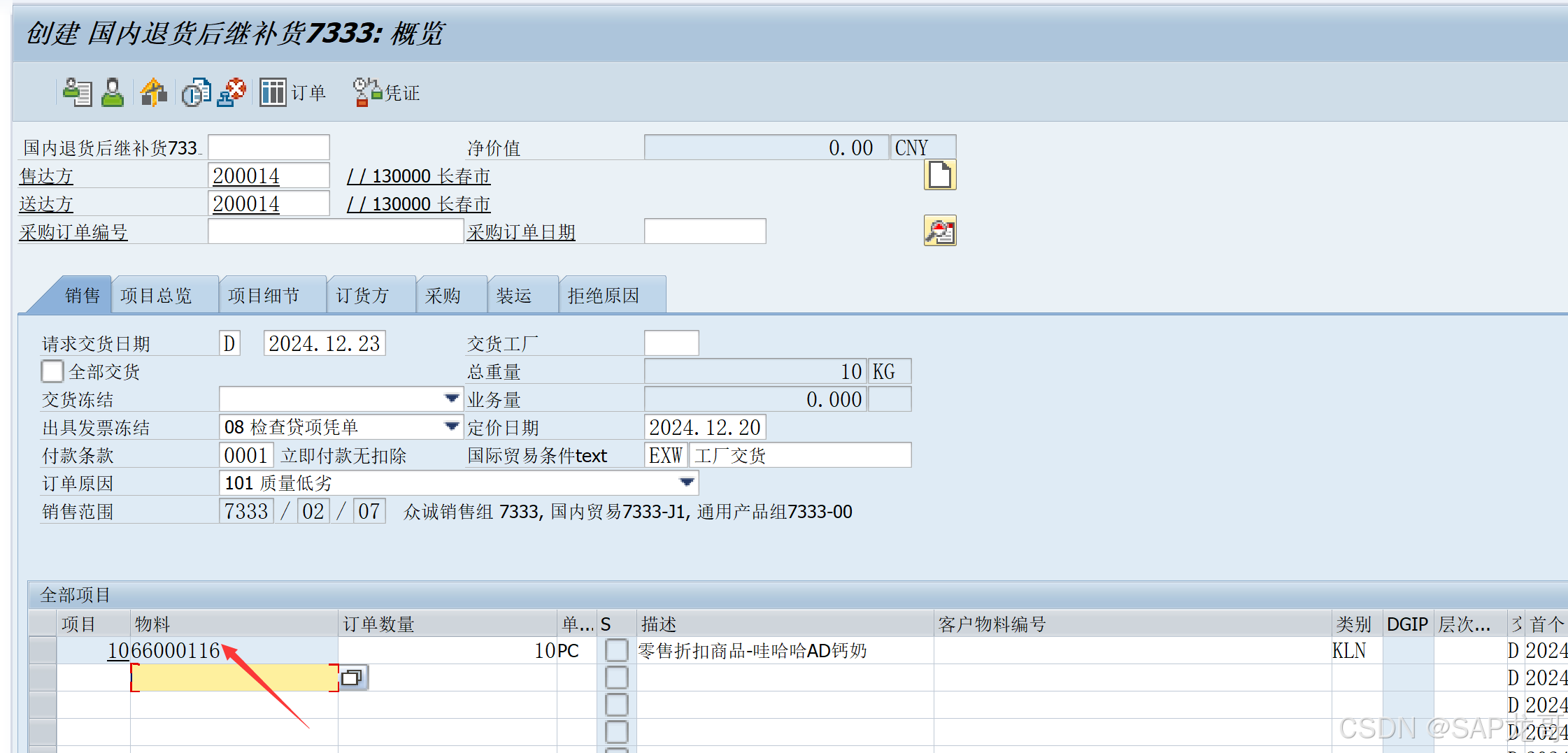
SAP-SD-参照退货订单补货时带不出行项目
业务场景: 当物料出现质量问题时,客户需要换货,不需要退款,就需要先做退货订单,然后参照退货订单进行补货,创建补货订单,但是创建补货订单时只是把抬头数据带入补货订单,没有带入行项…...

12-C语言单向链表
一、链表的概述 1.链表与数组对比 遍历数组中的数据,查询数据比较方便,但往数组中插入、删除数据需要移动大量数据;相反。链表遍历、查询数据不方便,但是插入、删除数据比较方便,不需要移动大量数据,直接…...

2024年11月 蓝桥杯青少组 STEMA考试 Scratch真题
2024年11月 蓝桥杯青少组 STEMA考试 Scratch真题(选择题) 题目总数:5 总分数:50 选择题 第 1 题 单选题 Scratch运行以下程宇后,小兔子会( )。 A. 变小 B. 变大 C. 变色 D. …...

FFmpeg 4.3 音视频-多路H265监控录放C++开发二十一.2,RTP协议-RTP协议概述,协议详情
前提: 为什么要学习 RTP(Real-time Transport Protocol)重点 简介:RTP是一个实时传输媒体数据的协议,通常与RTSP一起使用。它负责在网络上传输音视频数据。特点:RTP通过UDP或TCP传输媒体数据,提供时间戳和序…...

Linux系统编程——系统内核中的信号
目录 一、前言 二、系统内核中的信号 三、sigset_t 四、信号集操作 1、sigpending(); 2、sigemptyset(); 3、sigfillset(sigset_t *set); 4、int sigaddset ()和sigdelset() 编辑 5、sigismember() 6、sigprocmask() 五、信号集操作代码演示 六、深入理解进程的信…...

Z-Image-Turbo-辉夜巫女显存优化技巧:在低配置GPU上运行大模型的实战方法
Z-Image-Turbo-辉夜巫女显存优化技巧:在低配置GPU上运行大模型的实战方法 你是不是也遇到过这种情况:看到一个效果很棒的图像生成模型,比如Z-Image-Turbo-辉夜巫女,兴冲冲地准备跑起来试试,结果一运行就提示“CUDA ou…...

告别重复劳动:用快马AI智能生成OpenCode风格的高效工具函数
最近在开发一个需要大量表单验证的项目时,我发现每次都要重复写类似的验证逻辑,既浪费时间又容易出错。于是我开始寻找更高效的解决方案,最终在InsCode(快马)平台上找到了理想的工具。 需求分析 表单验证是每个Web项目都绕不开的基础功能。常…...

DeepSeek-Coder-V2本地化部署指南:构建你的专属AI编程助手
DeepSeek-Coder-V2本地化部署指南:构建你的专属AI编程助手 【免费下载链接】DeepSeek-Coder-V2 DeepSeek-Coder-V2: Breaking the Barrier of Closed-Source Models in Code Intelligence 项目地址: https://gitcode.com/GitHub_Trending/de/DeepSeek-Coder-V2 …...

Intv_AI_MK11跨平台开发体验:在Windows WSL2中无缝使用GPU进行模型调试
Intv_AI_MK11跨平台开发体验:在Windows WSL2中无缝使用GPU进行模型调试 1. 为什么选择WSL2进行AI开发 对于习惯Windows系统的开发者来说,直接使用Linux环境进行AI模型开发往往面临诸多不便。WSL2(Windows Subsystem for Linux 2)…...

GPT-SoVITS WebUI 终极指南:5分钟快速上手一站式语音合成解决方案
GPT-SoVITS WebUI 终极指南:5分钟快速上手一站式语音合成解决方案 【免费下载链接】GPT-SoVITS 1 min voice data can also be used to train a good TTS model! (few shot voice cloning) 项目地址: https://gitcode.com/GitHub_Trending/gp/GPT-SoVITS GPT…...
)
告别setData!用mobx-miniprogram+miniprogram-computed重构你的小程序状态管理(保姆级避坑指南)
重构小程序状态管理:mobx-miniprogram与miniprogram-computed实战指南 如果你正在开发一个功能逐渐复杂的中大型微信小程序,大概率已经遇到了这样的困境:页面间状态共享越来越混乱,setData调用遍布各个角落,视图更新性…...

Mermaid Live Editor:代码即画布的思维可视化革命
Mermaid Live Editor:代码即画布的思维可视化革命 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/mermaid-live-editor …...

DLSS状态指示器配置完全指南:实用监控工具深度解析
DLSS状态指示器配置完全指南:实用监控工具深度解析 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 在追求极致游戏体验的路上,你是否曾疑惑DLSS是否真正生效?DLSS Swapper作为一款专…...

3个秘诀让城通网盘下载提速10倍:ctfileGet工具全解析
3个秘诀让城通网盘下载提速10倍:ctfileGet工具全解析 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet ctfileGet是一款专注于获取城通网盘直连地址的开源工具,通过本地解析技术帮…...
如何快速配置TranslucentTB:Windows任务栏美化终极教程
如何快速配置TranslucentTB:Windows任务栏美化终极教程 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 想要让Windows任务栏变…...