01- 三自由度串联机械臂位置分析
三自由度串联机械臂如下图所示(d1=80mm,L1=100mm,L2=80mm),利用改进DH法建模,坐标系如下所示:

利用改进DH法建模,该机器人的DH参数表如下所示:

对该机械臂进行位置分析,即给定一组关节角度,求解末端点P相对于基坐标系的坐标值。
1.1 机器人工具箱仿真(RT)
当 θ 1 = 30 ° , θ 2 = 45 ° , θ 3 = 60 ° \theta_1=30°,\theta_2=45°,\theta_3=60° θ1=30°,θ2=45°,θ3=60°时,利用机器人工具箱的MDH法建模仿真如下:

仿真结果如下:

此时,末端点P的位置坐标仿真值为:
x P = 0.043305734126218 m x_P=0.043305734126218\ m xP=0.043305734126218 m, y P = 0.025002577255227 m y_P=0.025002577255227\ m yP=0.025002577255227 m, z P = 0.227984744221780 m z_P=0.227984744221780\ m zP=0.227984744221780 m
1.2 改进DH法建模仿真(MDH)
MDH的齐次变换矩阵如下:

坐标系4的齐次变换矩阵为:

当 θ 1 = 30 ° , θ 2 = 45 ° , θ 3 = 60 ° \theta_1=30°,\theta_2=45°,\theta_3=60° θ1=30°,θ2=45°,θ3=60°时,末端点P的位置坐标可以根据齐次变换矩阵获得,具体值如下所示: x P = 0.043305734126218 m x_P=0.043305734126218\ m xP=0.043305734126218 m, y P = 0.025002577255227 m y_P=0.025002577255227\ m yP=0.025002577255227 m, z P = 0.227984744221780 m z_P=0.227984744221780\ m zP=0.227984744221780 m

1.3 几何法分析求解(MATLAB)

利用几何法求解,可得末端点P的位置坐标:

当 θ 1 = 30 ° , θ 2 = 45 ° , θ 3 = 60 ° \theta_1=30°,\theta_2=45°,\theta_3=60° θ1=30°,θ2=45°,θ3=60°时,末端点P的位置坐标可以根据上式获得,具体值如下所示: x P = 0.043305734126218 m x_P=0.043305734126218\ m xP=0.043305734126218 m, y P = 0.025002577255227 m y_P=0.025002577255227\ m yP=0.025002577255227 m, z P = 0.227984744221780 m z_P=0.227984744221780\ m zP=0.227984744221780 m

1.4 Simscape模型仿真(Sim)
首先将solidworks模型的零件导出step格式,注意要选择参考坐标系。然后,在simscape模块中选择multibody模型进行建模,具体如下所示:

当设置好角度时,进行仿真,结果如下所示:

当 θ 1 = 30 ° , θ 2 = 45 ° , θ 3 = 60 ° \theta_1=30°,\theta_2=45°,\theta_3=60° θ1=30°,θ2=45°,θ3=60°时,末端点P的位置坐标可以获得,具体值如下所示: x P = 0.043305734126195 m x_P=0.043305734126195\ m xP=0.043305734126195 m, y P = 0.0250002577255245 m y_P=0.0250002577255245\ m yP=0.0250002577255245 m, z P = 0.22798474422179 m z_P=0.22798474422179\ m zP=0.22798474422179 m
1.5 结论
通过几种方法进行位置分析,可以看出:当给定某一关节角度时,不同方法计算出来的末端点P的坐标值几乎一样,表明计算成功!!
相关文章:
01- 三自由度串联机械臂位置分析
三自由度串联机械臂如下图所示(d180mm,L1100mm,L280mm),利用改进DH法建模,坐标系如下所示: 利用改进DH法建模,该机器人的DH参数表如下所示: 对该机械臂进行位置分析&…...

Flutter实现可拖拽操作Draggable
文章目录 1. Draggable 控件的构造函数主要参数: 2. Draggable 的工作原理3. 常见用法示例 1:基本的拖拽控件解释:示例 2:与 DragTarget 配合使用解释: 4. Draggable 的回调详解5. 总结 Draggable 是 Flutter 中一个用…...

Vue BPMN Modeler流程图
1、参考地址 git clone https://github.com/evanyangg/vue-bpmn-modeler.git 2、安装bpmn.js npm install bpmn-js --save 3、使用bpmn.js <template><div class"containers"><div class"canvas" ref"canvas"></div&g…...

写在公司40周年前夕
日子太快了,来这里工作六年多了。现在才知道原来入职的公司只是母公司的一小点。刚来一年就碰到疫情,三年疫情之后就迎来亏损,而后就是变了董事长,换了总经理。 这圣诞前,所有的子分又换了一把手。动作之大,…...

Python调用Elasticsearch更新数据库
文章目录 Elasticsearch介绍Python调用Elasticsearch更新数据库 Elasticsearch介绍 Elasticsearch是一个基于Lucene的搜索引擎,它提供了一个分布式、多租户能力的全文搜索引擎,具有HTTP web接口和无模式的JSON文档。Elasticsearch是用Java开发的&#x…...
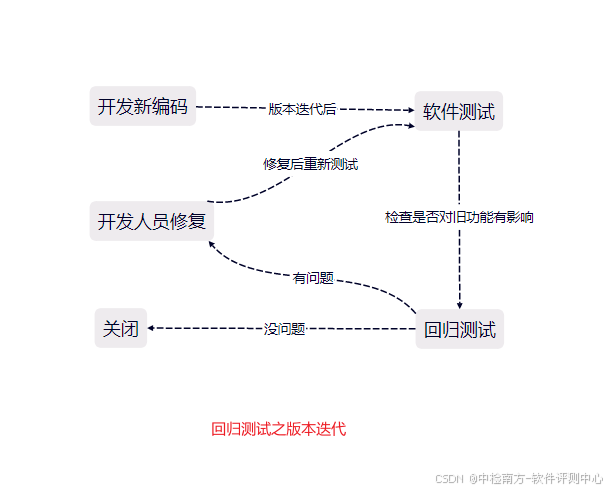
测试基础之测试分类
软件测试是确保软件产品满足预期功能、性能和用户体验要求的关键环节。它的主要目的是通过系统化的方法发现并修复软件中的缺陷,从而提高软件的质量和可靠性。在软件开发生命周期的不同阶段执行测试,以尽早发现潜在的错误或类型,早期发现缺陷…...

太阳能LED路灯智能控制系统(论文+源码)
1系统的功能及方案设计 本次课题为太阳能LED路灯智能控制系统,其系统整体架构如图2.1所示,太阳能板通过TP4056充电模块给锂电池进行充电,电池通过HX3001升压模块进行升压到5V给整个控制系统进行供电,控制系统由AT89C52单片机作为…...

文本数据处理
文本数据处理 一、数据转换与错误处理 (一)运维中的数据转换问题 在计算机审计及各类数据处理场景中,数据转换是关键步骤,涉及将被审计单位或其他来源的数据有效装载到目标数据库,并明确标示各表及字段含义与关系。…...
Liunx环境下安装人大金仓数据库V8R6版本
Liunx环境下安装人大金仓数据库V8R6版本 一:硬件环境要求二:软件环境要求三:安装包准备四:检测和配置环境4.1:检查操作系统信息4.2 检查系统内存与存储空间 五:配置内核参数六:预安装工作6.1 创…...
Android使用PorterDuffXfermode模式PorterDuff.Mode.SRC_OUT橡皮擦实现马赛克效果,Kotlin(3)
Android使用PorterDuffXfermode模式PorterDuff.Mode.SRC_OUT橡皮擦实现马赛克效果,Kotlin(3) import android.content.Context import android.graphics.Bitmap import android.graphics.BitmapFactory import android.graphics.Canvas impor…...

python 怎么引入类
一、导入单个类 from fun import Dog dogDog(husike) dog.bark() 二、导入多个类 多个类之间用逗号分隔 from fun import Dog,Cat dogDog(husike) dog.bark() catCat(maomi) cat.catch_mouse() 三、导入整个模块 import fun dogfun.Dog(husike) dog.bark() catfun.Cat(maomi) …...

Day35汉明距离
两个整数之间的 汉明距离 指的是这两个数字对应二进制位不同的位置的数目。 给你两个整数 x 和 y,计算并返回它们之间的汉明距离。 class Solution {public int hammingDistance(int x, int y) {int cnt 0;while (Math.max(x, y) ! 0) {if ((x & 1) ! (y &…...

中文学习系统:客户服务与学习支持
3.1 系统可行性分析 开发一款程序软件不仅需要时间,也需要人力,物力资源。而进行可行性分析这个环节就是解决用户这方面的疑问,看看程序在当前的条件下是否可以进行开发。 3.1.1 技术可行性分析 此程序选用的开发语言是Java,这种编…...

华为麦芒5(安卓6)termux记录 使用ddns-go,alist
下载0.119bate1版,不能换源,其他源似乎都用不了,如果root可以直接用面具模块 https://github.com/termux/termux-app/releases/download/v0.119.0-beta.1/termux-app_v0.119.0-beta.1apt-android-5-github-debug_arm64-v8a.apk 安装ssh(非必要) pkg install openssh开启ssh …...

餐厅下单助手系统(Java+MySQL)
项目概览 餐厅下单助手系统是一个采用 Java 实现的小型食品订单管理系统,并且以 SwingUI 打造视觉界面,数据库提供。本系统分为商家和顾客两类体验,有效地给予简洁性能。可用做课程设计,参考学习。 技术栈 Java: 核心开发语言S…...

Go操作MySQL
连接 Go语言中的database/sql包提供了保证SQL或类SQL数据库的泛用接口,并不提供具体的数据库驱动。使用database/sql包时必须注入(至少)一个数据库驱动。 我们常用的数据库基本上都有完整的第三方实现。例如:MySQL驱动 下载依赖…...
配置开机自启动服务)
Linux(Ubuntu/CentOS)配置开机自启动服务
systemd和systemctl的区别和联系 systemd:是现代Linux系统中的初始化系统和服务管理器。它主要负责系统引导和进程管理,支持并行化启动服务,并提供高级的服务管理和依赖控制。 systemctl:是systemd的命令行工具,用于与…...

springboot3版本结合knife4j生成接口文档
1.概述 knife4j官网为:介绍 | Knife4j (xiaominfo.com)https://doc.xiaominfo.com/docs/introduction 初步了解的码友可以初步了解一下官网的如下几个模块: 其中在快速开始模块中,不同的springboot版本都有一个使用的案例demo如下图位置&am…...

谈谈 Wi-Fi 的 RTS/CTS 设计
我不是专业的 Wi-Fi 技术工作者。但我可以谈谈作为统计复用网络的 Wi-Fi,通用的网络分布式协调功能在底层是相通的。 从一个图展开: 基于这底层逻辑,共享以太网可以用 CSMA/CD,而 Wi-Fi 只能用 CSMA/CA,区别在 CD(冲…...

JVM 详解
一. JVM 内存区域的划分 1. 程序计数器 程序计数器是JVM中一块比较小的空间, 它保存下一条要执行的指令的地址. [注]: 与CPU的程序计数器不同, 这里的下一条指令不是二进制的机器语言, 而是Java字节码. 2. 栈 保存方法中的局部变量, 方法的形参, 方法之间的调用关系. 栈又…...

零基础部署Nanbeige 4.1-3B:Streamlit极简UI手把手教程
零基础部署Nanbeige 4.1-3B:Streamlit极简UI手把手教程 如果你对本地运行大语言模型感兴趣,但又被复杂的命令行界面和简陋的Web界面劝退,那么今天这篇文章就是为你准备的。我们将一起完成一个既好看又好用的本地AI对话界面的部署,…...

.games 域名重塑数字娱乐边界
在互联网基础设施日益垂直化的今天,域名已不再仅仅是简单的网络地址,它已进化为一种数字资产的视觉锤和品牌战略的先导。在众多的新顶级域名(gTLD)中,“.games”凭借其鲜明的行业属性,正在重构全球游戏开发…...

Wan2.2-I2V-A14B Anaconda虚拟环境管理:隔离依赖与复现实验
Wan2.2-I2V-A14B Anaconda虚拟环境管理:隔离依赖与复现实验 1. 为什么需要虚拟环境 在AI项目开发中,依赖管理是个让人头疼的问题。想象一下这样的场景:你花了两周时间调试好的模型,换台机器就跑不起来了;或者更新了某…...

基于单片机的智能路灯控制系统设计 | 附源码
源码:点击获取源码 一、项目背景 本项目是单片机课程设计作品,旨在模拟城市路灯的智能化管理场景。传统的路灯控制方式通常依赖人工开关或简单的定时控制,存在能源浪费、维护困难等问题。随着智慧城市概念的提出,智能路灯系统成…...

Kandinsky-5.0-I2V-Lite-5s惊艳效果展示:古风人物图→衣袖飘动+发带飞扬动态视频
Kandinsky-5.0-I2V-Lite-5s惊艳效果展示:古风人物图→衣袖飘动发带飞扬动态视频 1. 模型效果震撼开场 想象一下,你有一张精美的古风人物插画,画中女子衣袂飘飘、发带轻扬。现在,只需一个简单的操作,就能让这幅静态画…...

如何用 Claude Code 快速完善接口文档和注释
在大多数项目中,代码本身并不是最大的问题。 真正让人头疼的是:没有文档,没有注释。常见情况包括: 接口没有说明,不知道怎么用方法没有注释,看不懂意图参数含义不清晰,只能靠猜老项目完全没有文…...

丹青幻境效果对比:Z-Image底座 vs SDXL在人物结构准确率与衣纹表现力评测
丹青幻境效果对比:Z-Image底座 vs SDXL在人物结构准确率与衣纹表现力评测 1. 评测背景与意义 在数字艺术创作领域,人物结构准确性和衣纹表现力一直是衡量AI绘画模型质量的关键指标。本次评测聚焦于丹青幻境采用的Z-Image底座与业界知名的SDXL模型&…...
)
MQ之KAFKA (broker 高可用)
Kafka KRaft 核心知识点(面试+生产极简版) KRaft(Kafka Raft):Kafka 2.8+ 引入、3.3+ 生产可用,完全替代 Zookeeper 的内置元数据一致性协议(基于 Raft)。 一句话背诵 内置 Raft、无 ZK、元数据自管理、选举更快、吞吐更高、架构极简。 1. 核心概念(必背) Control…...

实测挖到宝!这款AI修图工具,开发者/设计师都能直接用
最近刷CSDN,看到很多同行在讨论AI修图工具的实测对比,大多要么操作复杂、要么效果拉胯,直到我偶然刷到椒图AI(官网:https://www.jiaotuai.cn/),用了一周果断分享,不管是日常修图还是…...

别光调包了!在EduCoder上通关‘卷积神经网络实现’后,我搞懂了im2col加速的奥秘
从EduCoder实战到工业级优化:im2col如何让卷积计算快10倍 在EduCoder平台完成"卷积神经网络实现"实验时,很多同学会疑惑:为什么提供的代码模板里要用im2col这个看似复杂的函数?直接写四重循环实现卷积不是更直观吗&…...