细说STM32F407单片机中断方式CAN通信
目录
一、工程配置
1、时钟、DEBUG、USART6、GPIO、CodeGenerator
2、CAN1
3、NVIC
二、软件设计
1、KEYLED
2、can.h
3、can.c
(1)CAN1中断初始化
(2)RNG初始化和随机数产生
(3) 筛选器组设置
(4)发送消息
(5)中断方式接收消息
4、main.c
三、下载与运行
在实际的CAN通信中,使用轮询方式发送消息,使用中断方式接收消息更加实用和普遍。本实例设计一个CAN通信,使用中断方式接收消息,并且测试在两个FIFO上使用不同的筛选器。
本实例仍然使用使用旺宝红龙开发板STM32F407ZGT6 KIT V1.0。需要参考本文作者的其他文章:
参考文章1: 细说STM32F407单片机轮询方式CAN通信_stm32f407can波特率配置表-CSDN博客 https://wenchm.blog.csdn.net/article/details/144852504
参考文章2:细说STM32F407单片机CAN基础知识及其HAL驱动程序-CSDN博客 https://wenchm.blog.csdn.net/article/details/144769950
示例仍然引用KEYLED文件夹中的文件。
示例的功能和使用流程如下:
示例工程中,使用开发板上的S2键,按下S2键后,发送一个随机数的数据帧。并用LED1显示工作状态,输出到串口助手上。按下S6键,开发板复位。示例的功能还包括:
- 使用CAN1的回环模式自发自收。
- 开启FIFO0的接收中断,开启FIFO1的接收中断。
- 为FIFO0设置筛选器,只接收标识符ID为奇数的消息;为FIFO1设置筛选器,接收所有消息。
- 使用随机数生成器(Random Number Generator,RNG),在发送消息时,用随机数作为帧的数据。
[S2]KeyUp = Send a Data Frame LED1 ON一、工程配置
CAN接口原理图同参考文件1。
1、时钟、DEBUG、USART6、GPIO、CodeGenerator
与参考 文件1的设置相同或近似。
这里,设置HCLK=168MHz,PCLK1=42MHz,PCLK2=84MHz。
2、CAN1
CAN1模块的参数设置与参考文件1相似。

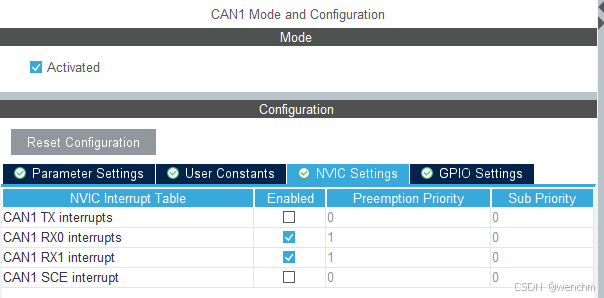
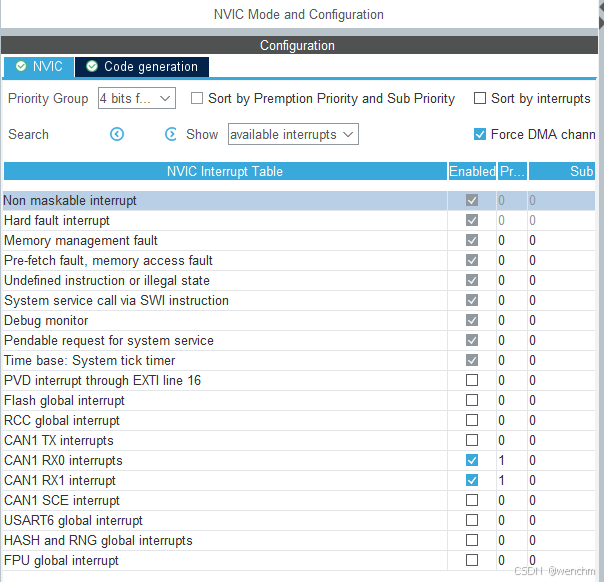
3、NVIC
使用CAN1模块的接收中断,打开CAN1 RX0中断和CAN1 RX1中断,两个中断的抢占优先级都设置为1,一个CAN模块有4个中断,RX0中断是FIFO0的中断,RX1中断是FIFO1的中断,每个中断有几个中断事件和对应的回调函数,详见参考文章2。
二、软件设计
1、KEYLED
本例的项目中要使用KEYLED,其中的keyled.c和keyled.h的使用方法与参考文章1相同。
2、can.h
/* USER CODE BEGIN Prototypes */
HAL_StatusTypeDef CAN_SetFilters();
void CAN_TestPoll(uint8_t msgID,uint8_t frameType);
/* USER CODE END Prototypes */3、can.c
/* USER CODE BEGIN 0 */
#include "rng.h"
#include <stdio.h>
/* USER CODE END 0 *//* USER CODE BEGIN 1 */
//设置筛选器,需要在完成CAN初始化之后调用此函数
HAL_StatusTypeDef CAN_SetFilters()
{CAN_FilterTypeDef canFilter;//1. 设置FIFO0的筛选器canFilter.FilterBank = 0; //筛选器组编号canFilter.FilterMode = CAN_FILTERMODE_IDMASK; //ID掩码模式canFilter.FilterScale = CAN_FILTERSCALE_32BIT; //32位长度//只接收stdID为奇数的帧canFilter.FilterIdHigh = 0x0020; //CAN_FxR1寄存器的高16位canFilter.FilterIdLow = 0x0000; //CAN_FxR1寄存器的低16位canFilter.FilterMaskIdHigh = 0x0020; //CAN_FxR2寄存器的高16位canFilter.FilterMaskIdLow = 0x0000; //CAN_FxR2寄存器的低16位canFilter.FilterFIFOAssignment = CAN_RX_FIFO0; //应用于FIFO0canFilter.FilterActivation = ENABLE; //使用筛选器canFilter.SlaveStartFilterBank = 14; //从CAN控制器筛选器起始的BankHAL_StatusTypeDef result=HAL_CAN_ConfigFilter(&hcan1, &canFilter);//2. 设置FIFO1的筛选器canFilter.FilterBank = 1; //筛选器组编号//接收所有帧canFilter.FilterIdHigh = 0x0000; //CAN_FxR1寄存器的高16位canFilter.FilterIdLow = 0x0000; //CAN_FxR1寄存器的低16位canFilter.FilterMaskIdHigh = 0x0000; //CAN_FxR2寄存器的高16位,所有位任意canFilter.FilterMaskIdLow = 0x0000; //CAN_FxR2寄存器的低16位,所有位任意canFilter.FilterFIFOAssignment = CAN_RX_FIFO1; //应用于FIFO 1result=HAL_CAN_ConfigFilter(&hcan1, &canFilter);return result;
}void CAN_SendMsg(uint8_t msgID,uint8_t frameType)
{CAN_TxHeaderTypeDef TxHeader;TxHeader.StdId = msgID; //stdIDTxHeader.RTR = frameType; //数据帧,CAN_RTR_DATATxHeader.IDE = CAN_ID_STD; //标准格式TxHeader.DLC =4; //数据长度TxHeader.TransmitGlobalTime = DISABLE;uint32_t rand;HAL_RNG_GenerateRandomNumber(&hrng, &rand); //产生32位随机数uint8_t TxData[8]; //最多8个字节TxData[3] = rand & 0x000000FF;TxData[2] = (rand & 0x0000FF00)>>8;TxData[1] = (rand & 0x00FF0000)>>16;TxData[0] = (rand & 0xFF000000)>>24;while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan1) < 1) {} //等待有可用的发送邮箱printf("Send MsgID= %X\r\n",msgID);uint32_t TxMailbox; //临时变量,用于返回使用的邮箱编号/* 发送到邮箱,由CAN模块负责发送到CAN总线 */if(HAL_CAN_AddTxMessage(&hcan1,&TxHeader,TxData,&TxMailbox) != HAL_OK)printf("Send to mailbox error.\r\n");
}//读取和显示FIFO0或FIFO1的消息
//参数FIFO_num是FIFO编号,CAN_RX_FIFO0或CAN_RX_FIFO1
void CAN_ReadMsg(uint32_t FIFO_num)
{CAN_RxHeaderTypeDef RxHeader;uint8_t RxData[8]; //接收数据缓存区,8个字节if(FIFO_num==CAN_RX_FIFO0){printf("Msg received by FIFO0.\r\n");if(HAL_CAN_GetRxMessage(&hcan1,CAN_RX_FIFO0,&RxHeader,RxData) != HAL_OK){printf("Read FIFO0 error.\r\n");return;}}else{printf("Msg received by FIFO1.\r\n");if(HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO1, &RxHeader, RxData) != HAL_OK){printf("Read FIFO1 error.\r\n");return;}}//显示接收到的消息printf("StdID= %lX\r\n",RxHeader.StdId);printf("RTR(0=Data,2=Remote)= %lX\r\n",RxHeader.RTR);printf("IDE(0=Std,4=Ext)= %lX\r\n",RxHeader.IDE);printf("FilterMatchIndex= %lX\r\n",RxHeader.FilterMatchIndex);printf("DLC(Data length)= %lX\r\n",RxHeader.DLC);for (uint8_t i=0; i<4; i++){printf("Data[0]= %X\r\n",RxData[0]);printf("Data[1]= %X\r\n",RxData[1]);printf("Data[2]= %X\r\n",RxData[2]);printf("Data[3]= %X\r\n",RxData[3]);}printf("** Reselect menu or reset **\r\n");
}
//FIFO0接收到新消息事件中断回调函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{CAN_ReadMsg(CAN_RX_FIFO0);
}//FIFO1接收到新消息事件中断回调函数
void HAL_CAN_RxFifo1MsgPendingCallback(CAN_HandleTypeDef *hcan)
{CAN_ReadMsg(CAN_RX_FIFO1);
}
/* USER CODE END 1 */(1)CAN1中断初始化
函数MX_CAN1_Init()的代码与参考文章1完全相同,函数HAL_CAN_MspInit()中与参考文章1比较,增加了两个中断的初始化设置,开启了CAN1_RX0和CAN1_RX1中断:
/* CAN1 interrupt Init */HAL_NVIC_SetPriority(CAN1_RX0_IRQn, 1, 0);HAL_NVIC_EnableIRQ(CAN1_RX0_IRQn);HAL_NVIC_SetPriority(CAN1_RX1_IRQn, 1, 0);HAL_NVIC_EnableIRQ(CAN1_RX1_IRQn);(2)RNG初始化和随机数产生
RNG是MCU的一个内部单元,其初始化很简单,就是定义了RNG模块的外设对象变量,开启其时钟。相关代码如下:
#include "rng.h"
RNG_HandleTypeDef hrng;void MX_RNG_Init(void)
{hrng.Instance = RNG;if (HAL_RNG_Init(&hrng) != HAL_OK){Error_Handler();}
}void HAL_RNG_MspInit(RNG_HandleTypeDef* rngHandle)
{if(rngHandle->Instance==RNG){/* RNG clock enable */__HAL_RCC_RNG_CLK_ENABLE();}
}void HAL_RNG_MspDeInit(RNG_HandleTypeDef* rngHandle)
{if(rngHandle->Instance==RNG){/* Peripheral clock disable */__HAL_RCC_RNG_CLK_DISABLE();}
}可以使用轮询方式或中断方式产生32位的随机数,分别对应两个函数。
HAL_RNG_GenerateRandomNumber() //轮询方式产生随机数。
HAL_RNG_GetRandomNumber_IT() //中断方式产生随机数。HAL_RNG_GenerateRandomNumber()的函数原型如下:
HAL_StatusTypeDef HAL_RNG_GenerateRandomNumber(RNG_HandleTypeDef *hrng,uint32_t*random32bit)RNG由时钟树中的时钟信号由PCLK1 42MHz驱动,典型值是42MHz,这个时钟频率不能太低,在本例中,这个时钟频率是42MHz。产生两个连续随机数的最小间隔是42个PLL42CLK周期。
(3) 筛选器组设置
在文件can.h中,自定义的函数CAN_SetFilters()用于对FIFO0和FIFO1进行筛选器设置。详细代码在can.c中实现。
为FIFO0设置的筛选器是只接收标识符ID为奇数的消息,为FIFO1设置的筛选器是可以接收任何消息。注意,可以为一个FIFO设置多个筛选器,但是一个筛选器只能用于一个FIFO,所以,这两个筛选器的FilterBank必须不同。结构体CAN_FilterTypeDef各成员变量的意义以及筛选器的设置原理详见参考文章1。
(4)发送消息
在main.c中调用函数CAN_SendMsg()发送数据帧,这个自定义函数的实现代码与参考文章1不同,并在can.c中实现这个函数的代码。
在其实现的程序中还调用函数HAL_RNG_GenerateRandomNumber(),产生一个32位随机数,然后分解为4字节存入发送数据缓冲区。程序仍然是用函数HAL_CAN_AddTxMessage()将需要发送的消息写入发送邮箱,由CAN模块自动将消息发送到CAN总线上。函数CAN_SendMsg()只管发送消息,接收消息由中断去处理。
(5)中断方式接收消息
由于开启了CAN1的RX0中断和RX1中断,在文件stm32f4xx_it.c中自动生成了这两个中断的ISR框架。
CAN1_RX0是FIFO0接收消息、满或上溢时产生的中断,接收消息中断事件对应的回调函数是HAL_CAN_RxFifo0MsgPendingCallback()。同样的,FIFO1接收消息中断事件对应的回调函数是HAL_CAN_RxFifo1MsgPendingCallback()。CAN1_RX0和CAN1_RX1中断事件与回调函数的对应关系详见参考文章1。所以,要使用中断方式处理FIFO0和FIFO1接收的消息,只需重新实现这两个回调函数即可。在文件can.c中重新实现这两个回调函数。
//FIFO0接收到新消息事件中断回调函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{CAN_ReadMsg(CAN_RX_FIFO0);
}//FIFO1接收到新消息事件中断回调函数
void HAL_CAN_RxFifo1MsgPendingCallback(CAN_HandleTypeDef *hcan)
{CAN_ReadMsg(CAN_RX_FIFO1);
}两个回调函数都调用了同一个函数CAN_ReadMsg(),只是传递了相应的FIFO编号。函数CAN_ReadMsg()负责读取FIFO0或FIFO1的消息并显示。读取FIFO里面收到的消息仍然使用函数HAL_CAN_GetRxMessage(),消息头结构体CAN_RxHeaderTypeDef的意义见参考文章1。这里显示了一个成员变量FilterMatchIndex的值,这是接收消息的FIFO内接收了消息的筛选器的序号,是在一个FIFO内的筛选器的序号,而不是筛选器的FilterBank属性值。
4、main.c
/* USER CODE BEGIN Includes */
#include "keyled.h"
#include <stdio.h>
/* USER CODE END Includes *//* USER CODE BEGIN 2 */printf("Demo18_2_CAN:CAN Interrupt.\r\n");printf("Test mode:Loopback.\r\n");if (CAN_SetFilters() == HAL_OK) //设置筛选器printf("ID Filter: Only Odd IDs.\r\n");if (HAL_CAN_Start(&hcan1) == HAL_OK) //启动CAN1模块printf("CAN is started.\r\n");printf("[S2]KeyUp = Send a Data Frame.\r\n");//必须开启FIFO接收到消息中断事件,否则不会响应中断事件__HAL_CAN_ENABLE_IT(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);__HAL_CAN_ENABLE_IT(&hcan1, CAN_IT_RX_FIFO1_MSG_PENDING);//HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);//HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO1_MSG_PENDING);// MCU output low level LED light is onLED1_OFF();/* USER CODE END 2 */在外设初始化部分,函数MX_RNG_Init()用于RNG的初始化,函数MX_CAN1_Init()用于CAN1模块的初始化。
函数CAN_SetFilters()用于设置FIFO0和FIFO1的筛选器组,与参考文章1的同名函数代码不同。这里要使用中断方式进行消息接收,还需要开启FIFO0和FIFO1的接收新消息的中断事件,即
__HAL_CAN_ENABLE_IT(&hcan1,CAN_IT_RX_FIFO0_MSG_PENDING);
__HAL_CAN_ENABLE_IT(&hcan1,CAN_IT_RX_FIFO1_MSG_PENDING);其中的两个宏分别是FIFO0和FIFO1接收新消息的中断事件使能控制位的宏定义,也作为中断事件类型宏定义,详见参考文章2。
主程序的while()循环中调用自定义函数CAN_SendMsg()以轮询方式发送一个数据帧,接收数据帧在中断里处理。
/* USER CODE BEGIN WHILE */uint8_t msgID=1;while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */KEYS curKey = ScanPressedKey(KEY_WAIT_ALWAYS);if (curKey==KEY_UP){CAN_SendMsg(msgID++, CAN_RTR_DATA);LED1_ON();}elseLED1_OFF();HAL_Delay(500); //延时,消除按键抖动}/* USER CODE END 3 *//* USER CODE BEGIN 4 */
//串口打印
int __io_putchar(int ch)
{HAL_UART_Transmit(&huart6,(uint8_t*)&ch,1,0xFFFF);return ch;
}
/* USER CODE END 4 */三、下载与运行
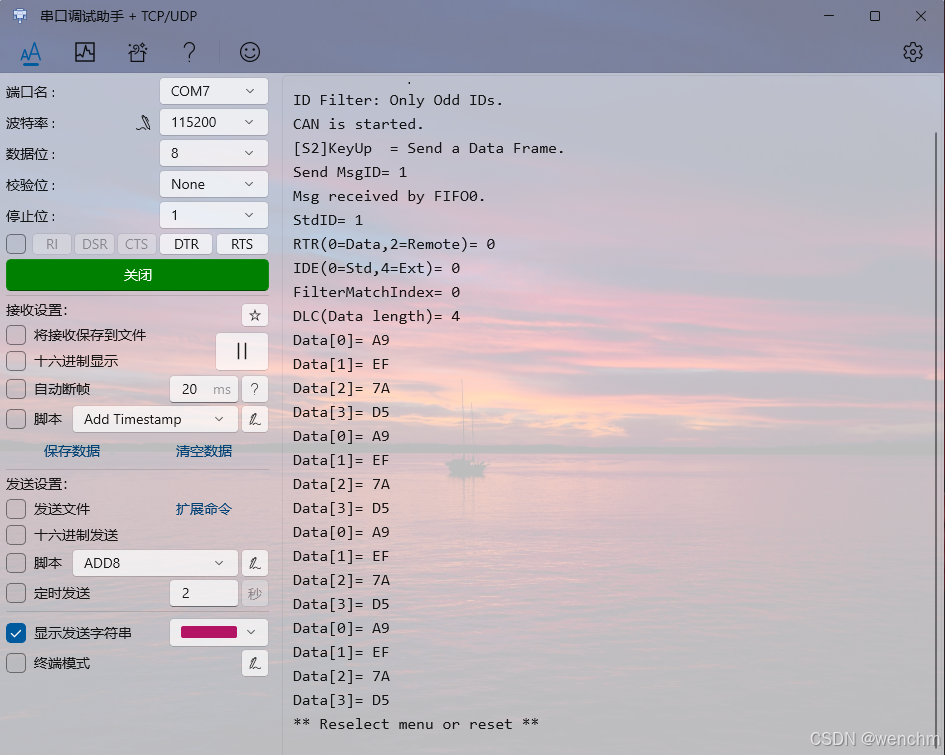
下载后在串口助手上先显示菜单,或者按下S6复位键也显示菜单。
每次按下KeyUp键可以发送一个标准格式数据帧,msgID加1,msgID作为数据帧的标识符ID。
运行时会发现,msgID为奇数时,是由FIFO0接收消息,msgID为偶数时,是由FIFO1接收消息。因为在设置筛选器组时,设置FIFO0只能接收标识符ID为奇数的消息,FIFO1可以接收任意标识符ID的消息。当标识符ID为偶数时,只能由FIFO1接收,当标识符ID为奇数时,两个FIFO都可以接收,但是由FIFO0优先接收。
不管是哪个FIFO接收的消息,显示的FilterMatchIndex的值都是0,因为它们都只有一个筛选器。
相关文章:
细说STM32F407单片机中断方式CAN通信
目录 一、工程配置 1、时钟、DEBUG、USART6、GPIO、CodeGenerator 2、CAN1 3、NVIC 二、软件设计 1、KEYLED 2、can.h 3、can.c (1)CAN1中断初始化 (2)RNG初始化和随机数产生 (3) 筛选器组设置…...

Python应用指南:高德交通态势数据
在现代城市的脉络中,交通流量如同流动的血液,交通流量的动态变化对出行规划和城市管理提出了更高的要求。为了应对这一挑战,高德地图推出了交通态势查询API,旨在为开发者提供一个强大的工具,用于实时获取指定区域或道路…...

医学图像分析工具01:FreeSurfer || Recon -all 全流程MRI皮质表面重建
FreeSurfer是什么 FreeSurfer 是一个功能强大的神经影像学分析软件包,广泛用于处理和可视化大脑的横断面和纵向研究数据。该软件由马萨诸塞州总医院的Martinos生物医学成像中心的计算神经影像实验室开发,旨在为神经科学研究人员提供一个高效、精确的数据…...

.NET框架用C#实现PDF转HTML
HTML作为一种开放标准的网页标记语言,具有跨平台、易于浏览和搜索引擎友好的特性,使得内容能够在多种设备上轻松访问并优化了在线分享与互动。通过将PDF文件转换为HTML格式,我们可以更方便地在浏览器中展示PDF文档内容,同时也更容…...

mamba-ssm安装
注意1:mamba-ssm要与casual-conv1d一起安装。 注意2:mamba-ssm与cuda、pytorch版本要对应。需要看你下载的代码的requirements.txt causal-conv1d与mamba的whl包官网下载: https://github.com/Dao-AILab/causal-conv1d/releases?page3 htt…...

网络IP协议
IP(Internet Protocol,网际协议)是TCP/IP协议族中重要的协议,主要负责将数据包发送给目标主机。IP相当于OSI(图1)的第三层网络层。网络层的主要作用是失陷终端节点之间的通信。这种终端节点之间的通信也叫点…...

双指针算法详解
目录 一、双指针 二、双指针题目 1.移动零 解法: 代码: 2.复写零 编辑 解法: 代码: 边界情况处理: 3.快乐数 编辑 解法:快慢指针 代码: 4.盛水最多的容器 解法:(对撞指针)…...

MySQL的最左匹配原则是什么
最左匹配原则是应用于联合索引的规则。 对于以下表F:f1,f2,f3;建立了联合索引(f2,f3),那么我们在查询的时候如果是: select * from F where f2 ? and f3 ?; 或 sele…...

LeetCode:106.从中序与后序遍历序列构造二叉树
跟着carl学算法,本系列博客仅做个人记录,建议大家都去看carl本人的博客,写的真的很好的! 代码随想录 LeetCode:106.从中序与后序遍历序列构造二叉树 给定两个整数数组 inorder 和 postorder ,其中 inorder …...

22. 【.NET 8 实战--孢子记账--从单体到微服务】--记账模块--切换主币种
这篇文章我们将结合主币种设置以及收支记录实现切换主币种后重新计算以前记录的转换后的金额。那么,为什么要在切换主币种后要重新计算转换后的金额呢?有以下两个原因: 统一的币种,方便我们统计数据方便用户按照当地的币种查看收…...

01.02周四F34-Day43打卡
文章目录 1. 地是湿的。昨晚估计下雨了。2. 你可能把包丢在餐厅里了吧?3. 她说他可能误了航班。4. 我本来应该早点来的,但路上特别堵。5. 约翰可能在那次事故中受了重伤。6. 这是一个情景对话7. 我本可以走另一条路的。8. 我准是瘦了不少,你看我这裤子现在多肥。9. 钱没了!会…...

行业商机信息付费小程序系统开发方案
行业商机信息付费小程序系统,主要是整合优质行业资源,实时更新的商机信息。在当今信息爆炸的时代,精准、高效地获取行业商机信息对于企业和个人创业者而言至关重要。 一、使用场景 日常浏览:用户在工作间隙或闲暇时间,…...

cut-命令详解
一、命令 1.cut列截取命令 cut命令的默认分隔符是制表符 2.参数: -f 列号 #提取第几列-d 分隔符 #按照指定分隔符分割列-c 字符范围 #不依赖分隔符来区分列,而是通过字符范围(行首为0)来进行字段提取。“n-”表…...

Apache MINA 反序列化漏洞CVE-2024-52046
漏洞描述: Apache MINA 是一个功能强大、灵活且高性能的网络应用框架。它通过抽象网络层的复杂性,提供了事件驱动架构和灵活的 Filter 链机制,使得开发者可以更容易地开发各种类型的网络应用。 Apache MINA 框架的 ObjectSerializationDeco…...
)
二、AI知识(神经网络)
二、AI知识(神经网络) 1.常用算法 FNN CNN RNN LSTM DNN GRU 2.深度学习中概念及算法 1. 感知机 感知机(Perceptron)是一种最早的人工神经网络模型之一,通常用来解决二分类问题。它由弗兰克罗森布拉特&#…...
模块)
node.js之---子线程(child_process)模块
为什么需要子线程(child_process)模块 Worker Threads 的基本概念 如何使用 Worker Threads Worker Threads 的性能 Worker 线程的优势和限制 进阶用法:共享内存 为什么需要子线程(child_process)模块 在 Node.js…...

Json字符串解析失败
通过第三方服务,拿到响应体的data对象(拿到的时候对象是有值的) 通过JSON.parseObject方法,拿到的对象,值为null 通过查看对应的json字符串,发现命名不一样... JSONField SeriealizedName注解是用来解析j…...

LeetCode算法题——螺旋矩阵ll
题目描述 给你一个正整数n,生成一个包含1到n2所有元素,且元素按顺时针顺序螺旋排列的n x n正方形矩阵matrix 。 示例 输入:n 3 输出:[[1,2,3],[8,9,4],[7,6,5]]题解 思路: 将整个过程分解为逐圈填充的过程…...

【开源社区openEuler实践】hpcrunner
title: 探索 Hpcrunner:高性能计算的得力助手 date: ‘2024-12-31’ category: blog tags: Hpcrunner高性能计算任务调度资源优化 sig: HPC archives: ‘2024-12’ author:way_back summary: Hpcrunner 作为高性能计算领域的一款实用工具,专注于优化任务…...

linux下安装达梦数据库v8详解
目录 操作系统、数据库 1、下载达梦数据库 2、安装前准备 2.1、建立数据库用户和组 2.2、修改文件打开最大数 2.3、挂载镜像 2.4、新建安装目录 3、数据库安装 4、配置环境变量 5、初始化数据库实例 6、注册服务 7、使用数据库 8、卸载数据库 9、多实例管理 10、…...

物理引导的机器学习工作流:气候建模的融合创新与实践
1. 项目概述:当气候建模遇见机器学习如果你像我一样,在气候模拟这个领域摸爬滚打超过十年,就会深刻体会到一种“甜蜜的负担”:我们构建的地球系统模型(ESM)越来越精细,物理过程越来越复杂&#…...

美团外卖mtgsig与waimai_sign双层签名逆向解析
1. 这不是“爬虫教程”,而是一份反向工程现场笔记你搜到这篇内容,大概率正卡在某个调试窗口前:抓包看到mtgsig和waimai_sign两个参数像两堵墙,无论怎么改请求头、换UA、清缓存,返回永远是{"code":403,"…...

【DeepSeek架构评审功能深度解密】:20年架构师亲授3大避坑指南与5步落地 checklist
更多请点击: https://kaifayun.com 第一章:DeepSeek架构评审功能全景概览 DeepSeek架构评审功能是一套面向大模型系统设计与工程落地的自动化分析框架,聚焦于模型结构合理性、计算图优化潜力、内存访问模式、算子兼容性及部署约束等多维度评…...

广州因特智能:AI视觉软硬结合,打破半导体检测装备“卡脖子”困境
【导语:广州因特智能科技孵化于西安电子科技大学广州研究院,专注用AI视觉技术解决工业场景的“卡脖子”检测难题,为半导体、光通信、新能源三大领域提供高端检测装备。】校地合作孵化,构建完整能力体系广州因特智能科技由西安电子…...

基于PIC32的嵌入式MIDI合成器:从波表合成到硬件实现
1. 项目概述:一个基于嵌入式微控制器的MIDI声音合成器如果你对电子音乐制作、嵌入式开发,或者DIY硬件合成器感兴趣,那么“REMI Synth”这个项目绝对值得你花时间深入了解。它本质上是一个数字单音MIDI控制的声音合成器,核心是一块…...

LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案
LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案 【免费下载链接】LDBlockShow LDBlockShow: a fast and convenient tool for visualizing linkage disequilibrium and haplotype blocks based on VCF files 项目地址: https://gitcode.com/gh_mirror…...

独立开发者利用taotoken模型广场为不同任务选择性价比最优模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者利用taotoken模型广场为不同任务选择性价比最优模型 对于独立开发者而言,在有限的预算内高效完成多样化的开…...

Python-for-Android 完整指南:5分钟将Python应用打包为Android APK
Python-for-Android 完整指南:5分钟将Python应用打包为Android APK 【免费下载链接】python-for-android Turn your Python application into an Android APK 项目地址: https://gitcode.com/gh_mirrors/py/python-for-android Python-for-Android࿰…...

PostgreSQL Merge Join 大白话详解
用生活中最直观的例子,彻底搞懂 Merge Join 是什么、为什么快、什么时候用。一、先从生活场景开始 场景一:两摞乱序试卷找同学 期末考试,老师手里有两摞试卷: A 摞:数学试卷,500 份,乱序堆放B 摞…...

机器学习加速分子晶体偏振拉曼光谱模拟:非谐效应与准谐效应的分离
1. 项目概述:当机器学习遇见偏振拉曼光谱 偏振-取向拉曼光谱(PO-Raman)一直是我在材料光谱分析领域里觉得既迷人又头疼的技术。它就像给材料的“分子指纹”加上了方向滤镜,能揭示出振动模式在空间中的对称性和各向异性,…...