《自动驾驶与机器人中的SLAM技术》ch8:基于 IESKF 的紧耦合 LIO 系统
目录
基于 IESKF 的紧耦合 LIO 系统
1 IESKF 的状态变量和运动过程
1.1 对名义状态变量的预测
1.2 对误差状态变量的预测及对协方差矩阵的递推
2 观测方程中的迭代过程
3 高维观测中的等效处理
4 NDT 和 卡尔曼滤波的联系
5 紧耦合 LIO 系统的主要流程
5.1 IMU 静止初始化
5.2 ESKF 之 运动过程——使用 IMU 预测
5.3 使用 IMU 预测位姿进行运动补偿
5.4 松耦合系统的配准部分
参考
紧耦合系统,就是把点云的残差方程直接作为观测方程,写入观测模型中。这种做法相当于在滤波器或者优化算法内置了一个 ICP 或 NDT。因为 ICP 和 NDT 需要迭代来更新它们的最近邻,所以相应的滤波器也应该使用可以迭代的版本,ESKF 对应的可迭代版本的滤波器即为 IESKF。
紧耦合和松耦合的联系:
| 紧耦合LIO | 松耦合 LIO | |
| 预测 | 使用IMU读数预测得到先验位姿 | 同 |
| 观测 | 使用滤波器预测得到的先验位姿(首次)和更新后位姿(后续迭代)计算点云残差 | 使用点云配准部分迭代优化得到的位姿作为观测值,观测过程本身不迭代 |
| 更新 | 多次迭代,直到更新量dx满足要求 每次迭代都会以上一次更新的位姿来重新计算点云残差 | 一次更新 |
基于 IESKF 的紧耦合 LIO 系统
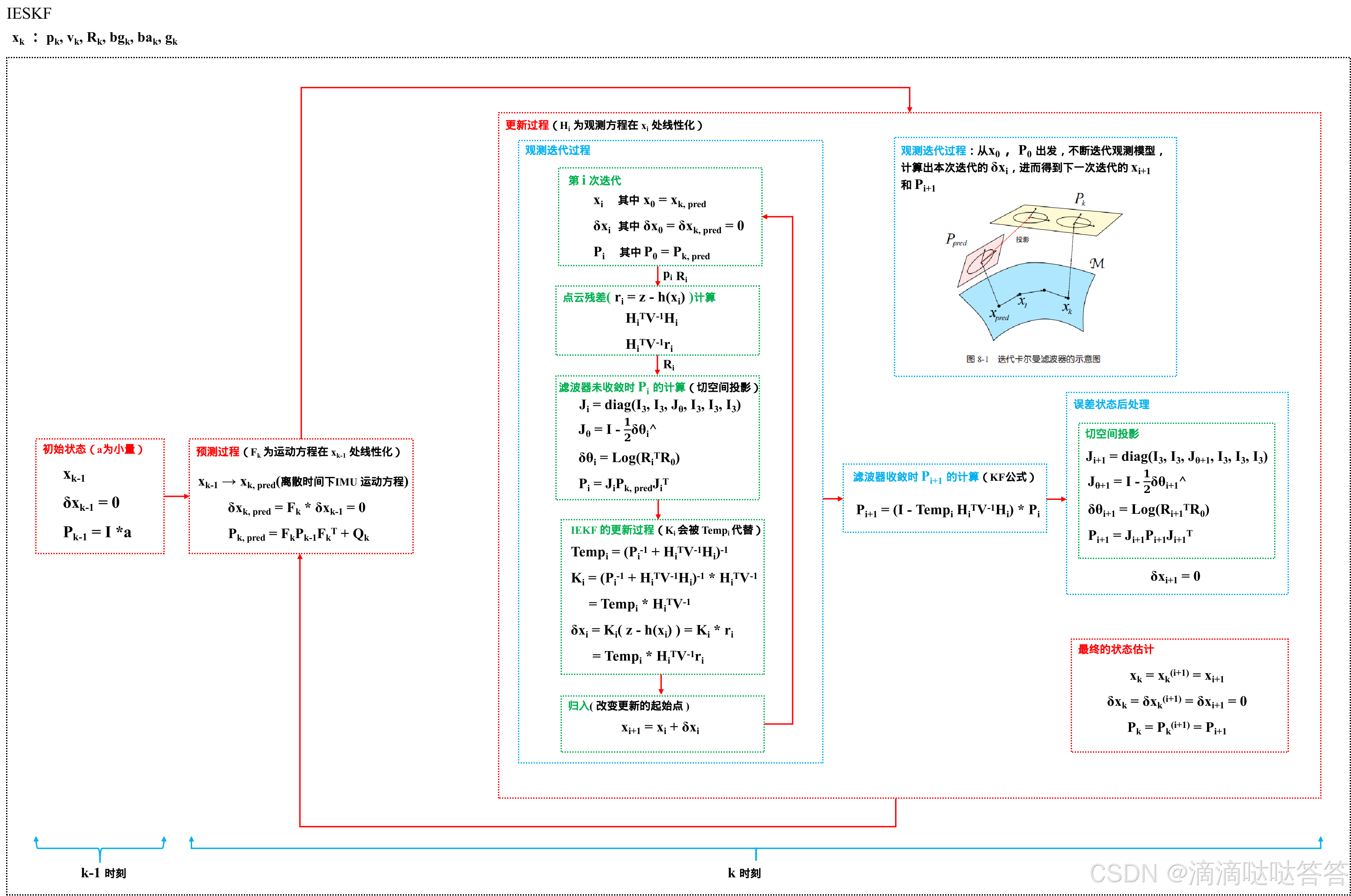
基于 IESKF 的紧耦合 LIO 系统的流程图如下所示:

1 IESKF 的状态变量和运动过程
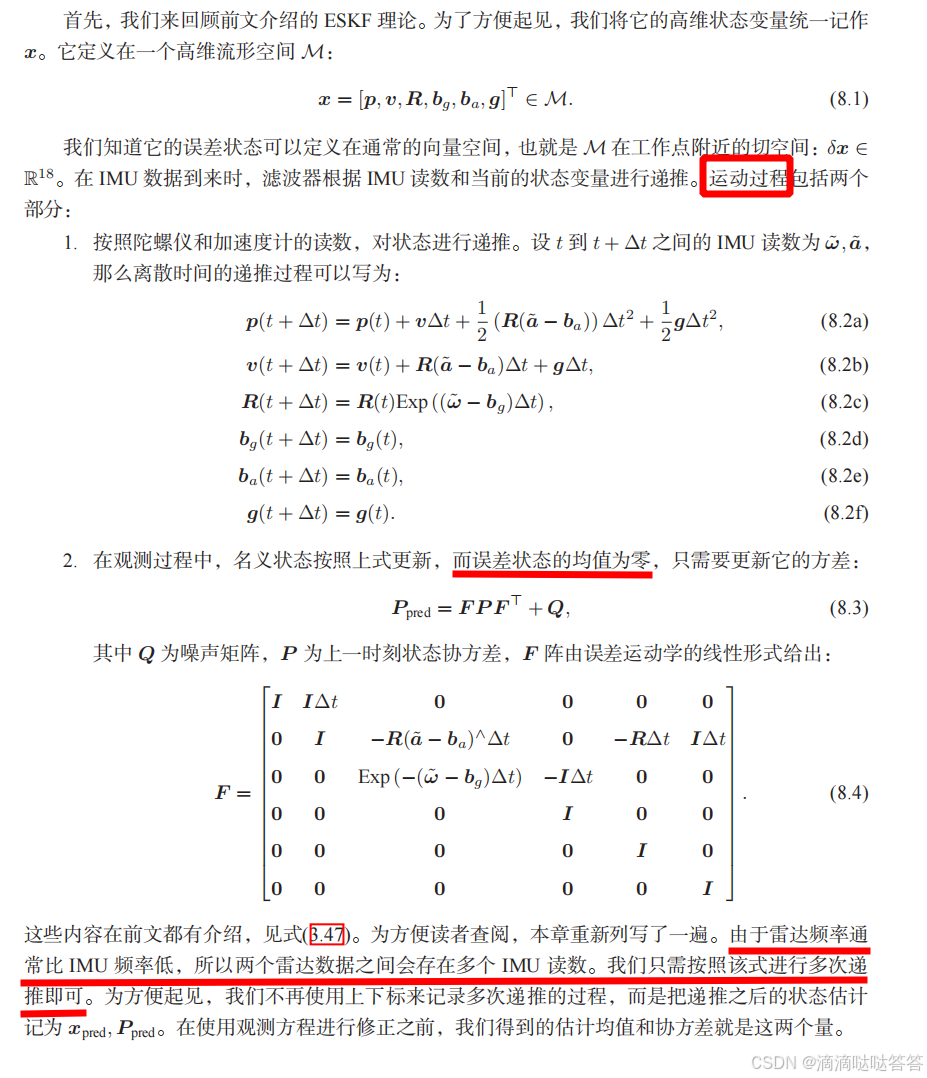
IESKF 的状态变量及运动过程 和 前文介绍过的 ESKF 的状态变量及运动过程完全相同,包括:① 对名义状态变量的预测 ②对误差状态变量的预测及对协方差矩阵的递推参考 《自动驾驶与机器人中的SLAM技术》ch3:惯性导航与组合导航 和 《自动驾驶与机器人中的SLAM技术》ch7:基于 ESKF 的松耦合 LIO 系统 即可。
1.1 对名义状态变量的预测
1.2 对误差状态变量的预测及对协方差矩阵的递推
为线性化后的雅可比矩阵,由于 离散时间下误差状态变量的运动方程 已经线性化,所以我们可以直接得到
。注意其等号右侧时间下标为
:
在此基础上执行 对误差状态变量的预测及对协方差矩阵的递推:
省略时间下标得:
书上的内容如下所示:
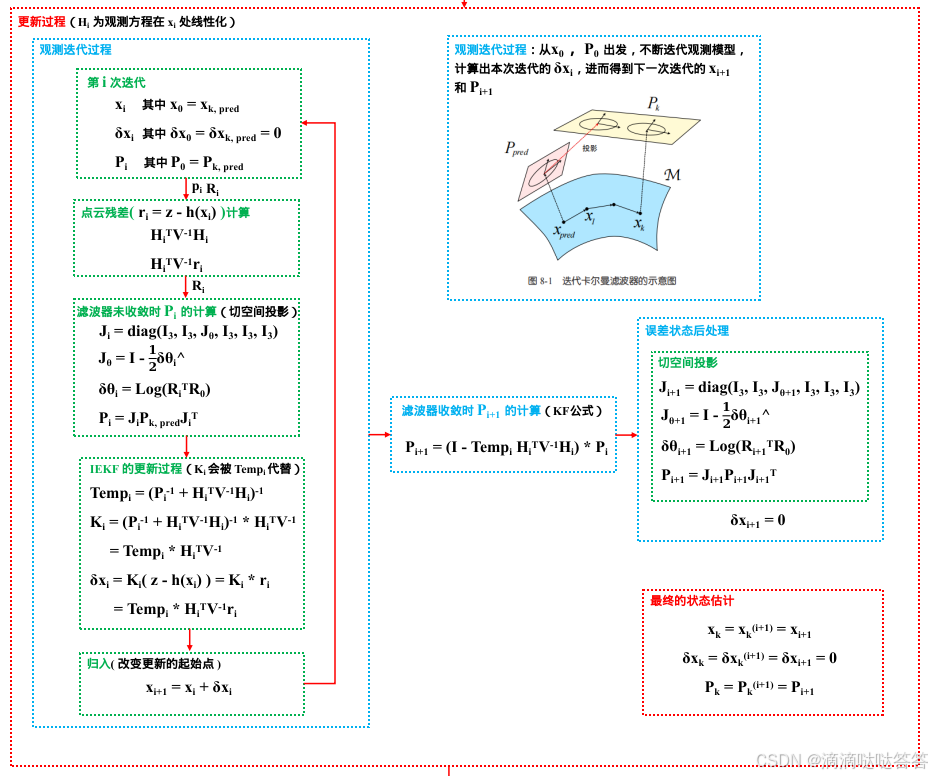
2 观测方程中的迭代过程

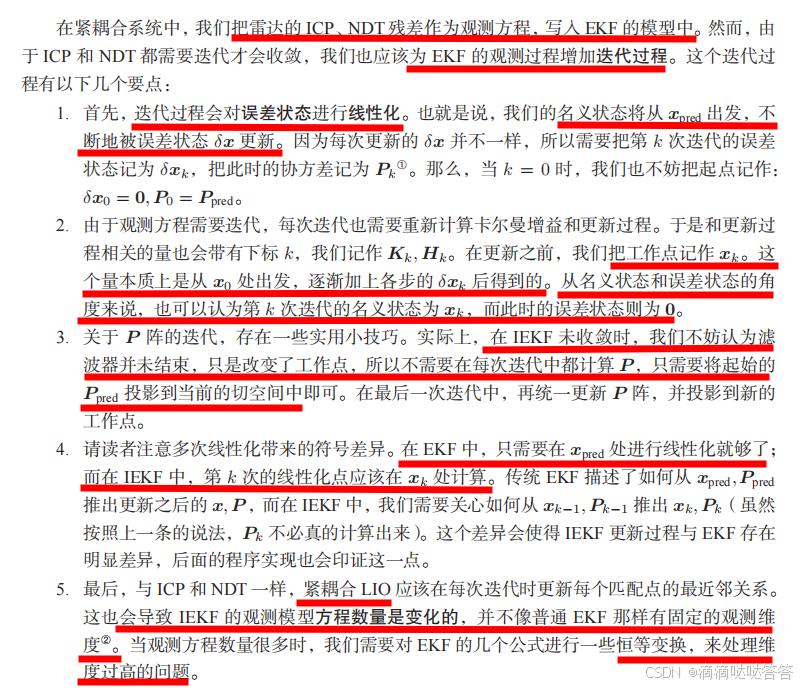
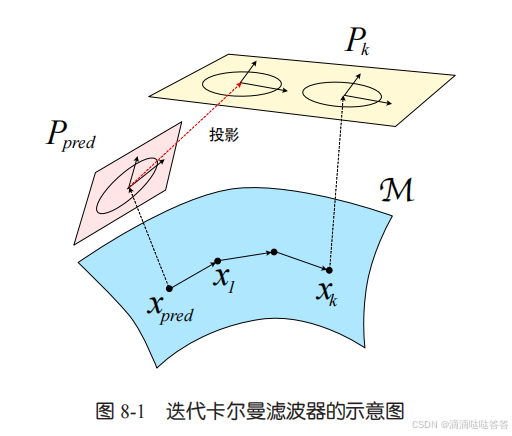
整个示意图如下图所示。我们从 ,
出发,不断迭代观测模型,计算出本次迭代的
,进而得到下一次迭代的
和
(在滤波器未收敛时只需进行切空间投影),最终收敛。
切空间投影:把一个切空间中的高斯分布投影到另一个切空间中。
考虑当前为第 次迭代,工作点是
、
,希望计算本次的增量
,进而得到下一次迭代的
和
。
IESKF 的更新过程的表达式如下:
对于其中的 :
- 如果滤波器没有收敛,则暂不使用卡尔曼公式对
进行更新,因为下一时刻的
可以由
算得,所以可以按照那时的
即 。
- 如果滤波器收敛,则
应该先按照卡尔曼公式进行更新,然后再使用切空间投影:
3 高维观测中的等效处理
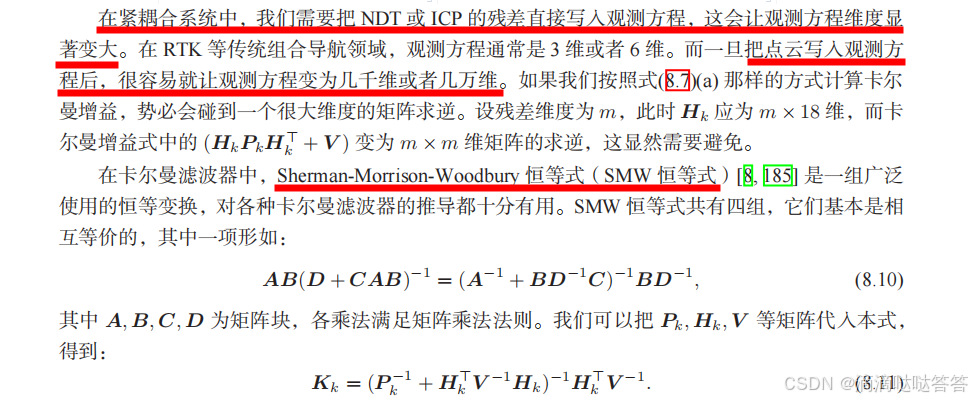
即使用 SMV 恒等式对卡尔曼增益的公式进行变换,得:
综上,IESKF 的更新过程的表达式变为如下形式:
滤波器收敛时, 的卡尔曼更新公式变为:
下面介绍一个更加方便的表达方式。设一中间变量 ,其计算公式如下所示:
则 IESKF 的更新过程的表达式变为如下形式:
滤波器收敛时, 的卡尔曼更新公式变为如下形式:
4 NDT 和 卡尔曼滤波的联系
先给出结论:紧耦合 LIO 系统看成带 IMU 预测的高维 NDT 或 ICP,并且这些预测分布还会被推导至下一时刻。
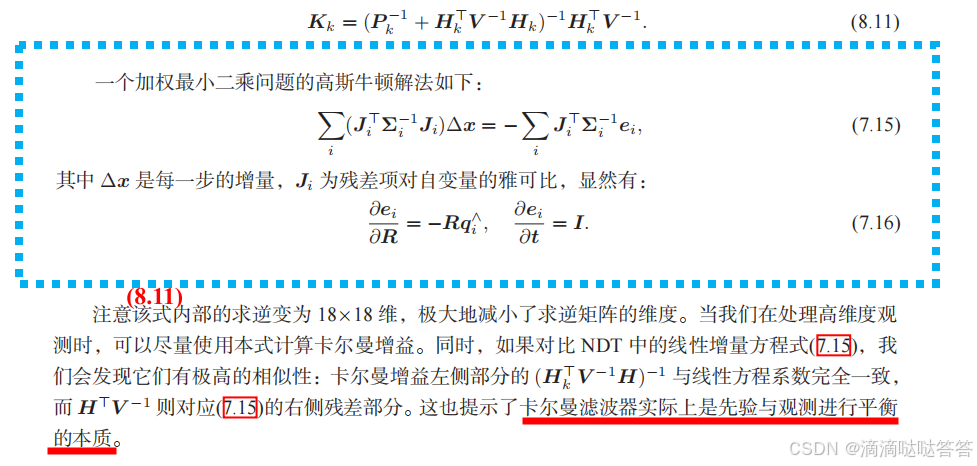
式(7.15)左侧矩阵求逆之后得到 ,就和式(8.11)中没有预测的卡尔曼增益
一致了。只是通常的卡尔曼增益写成了矩阵形式,而 ICP 或 NDT 写成了求和形式。为了方便后文介绍 NDT LIO,我们来推导将 NDT 误差写入卡尔曼增益的形式。并且,在实验部分,我们也会参考这里的推导方式,使用求和形式的卡尔曼增益。
没有预测的卡尔曼增益公式:当没有预测时,相当于忽略了预测误差协方差 ,直接对观测误差进行加权修正,因此去掉
,公式变为
。
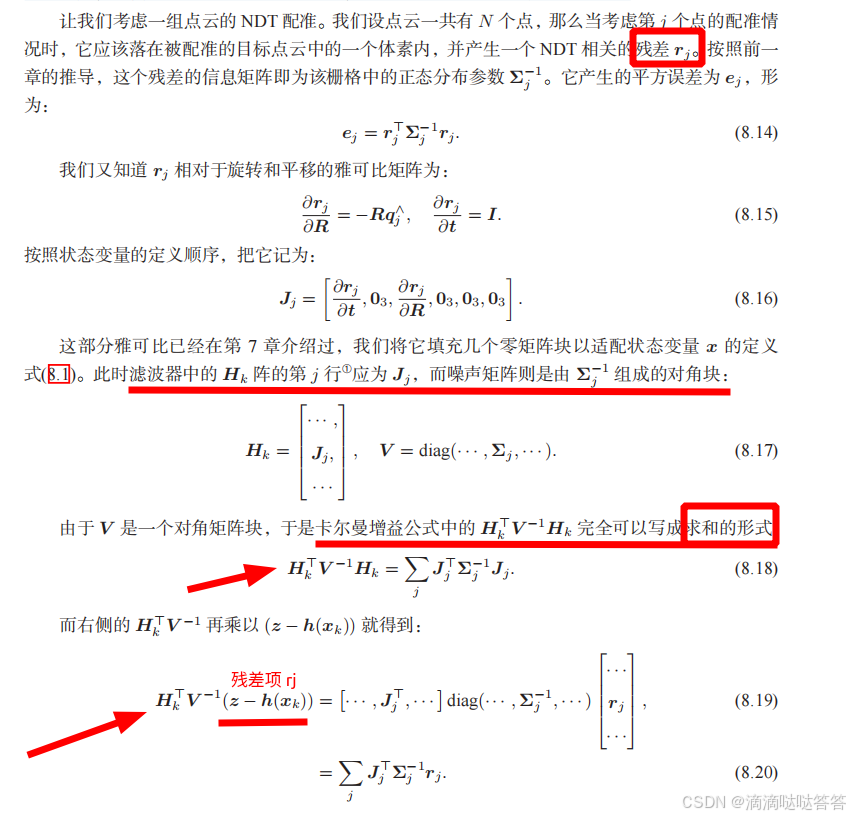
注意:这里点云中的第 个点
经过 IESKF 的预测位姿
(
) 的转换后,会落在目标点云中的某一个体素内,假设这个体素的正态分布参数为
。此时,该点的残差
为 转换后的点的坐标和体素中的正态分布参数中的均值之差,即
。这个点产生的平方误差为
,即
。即:
推导出以上关系后,在当前第 次迭代的过程中,我们可以向增量 NDT 里程计传入 IESKF 的预测位姿
,在 NDT 内部计算点云残差
(
)和
(
),计算完成后将这两个表示点云残差的值传递到 IESKF 中,结合预测协方差矩阵
计算得到当前迭代过程的增量
,最后将增量代入名义状态变量
,进而得到下一次迭代的
和
。
IESKF 的更新过程的流程图如下所示:
5 紧耦合 LIO 系统的主要流程
5.1 IMU 静止初始化
紧耦合 LioIEKF 类持有一个 IncNdt3d(增量 NDT,与松耦合不同)对象,一个 ESKF 对象,一个 MessageSync 对象 处理同步之后的点云和 IMU。该类处理流程非常简单:当 MeasureGroup 到达后,在 IMU 未初始化时,使用第 3 章的静止初始化来估计 IMU 零偏。初始化完毕后,先使用 IMU 数据进行预测,再用预测数据对点云去畸变,最后对去畸变的点云做配准。
void LioIEKF::ProcessMeasurements(const MeasureGroup &meas) {LOG(INFO) << "call meas, imu: " << meas.imu_.size() << ", lidar pts: " << meas.lidar_->size();measures_ = meas;if (imu_need_init_) {// 初始化IMU系统TryInitIMU();return;}// 利用IMU数据进行状态预测Predict();// 对点云去畸变Undistort();// 配准Align();
}IMU 静止初始化结果如下:

I0113 20:08:47.763998 403914 lio_iekf.cc:44] call meas, imu: 10, lidar pts: 3601
I0113 20:08:47.764031 403914 static_imu_init.cc:86] mean acce: -0.00215149 00.00016898 000.0978879
I0113 20:08:47.764093 403914 static_imu_init.cc:109] IMU 初始化成功,初始化时间= 9.99018, bg = -0.00259592 00.00176906 0.000707638, ba = 000.213411 -0.0167615 00-9.70973, gyro sq = 5.96793e-05 4.42613e-05 3.58264e-05, acce sq = 9.71749e-07 1.85436e-06 2.14871e-07, grav = 000.215562 -0.0169305 00-9.80762, norm: 9.81
I0113 20:08:47.764106 403914 static_imu_init.cc:113] mean gyro: -0.00259592 00.00176906 0.000707638 acce: 000.213411 -0.0167615 00-9.70973
imu try init true time:1547714610.30704498
I0113 20:08:47.764122 403914 lio_iekf.cc:149] IMU初始化成功5.2 ESKF 之 运动过程——使用 IMU 预测
IMU 的静止初始化与《自动驾驶与机器人中的SLAM技术》ch3:惯性导航与组合导航 中介绍的大体一致。当 MeasureGroup 到达后,在 IMU 未初始化时,调用 StaticIMUInit::AddIMU() 函数进行 IMU的静止初始化。当 IMU 初始化成功时,在当前 MeasureGroup 中完成 ESKF 中 Q, V, b_g, b_a, g_w, P 的初始化。
void LioIEKF::TryInitIMU() {for (auto imu : measures_.imu_) {imu_init_.AddIMU(*imu);}if (imu_init_.InitSuccess()) {// 读取初始零偏,设置ESKFsad::IESKFD::Options options;// 噪声由初始化器估计options.gyro_var_ = sqrt(imu_init_.GetCovGyro()[0]);options.acce_var_ = sqrt(imu_init_.GetCovAcce()[0]);ieskf_.SetInitialConditions(options, imu_init_.GetInitBg(), imu_init_.GetInitBa(), imu_init_.GetGravity());imu_need_init_ = false;LOG(INFO) << "IMU初始化成功";}
}注意:这里有一个小地方和松耦合 LIO 不同,即协方差矩阵 P 的初始化,更加细节一些。
- ESKF 协方差矩阵初始化
void ESKF::SetInitialConditions(Options options, const VecT& init_bg, const VecT& init_ba,const VecT& gravity = VecT(0, 0, -9.8)) {BuildNoise(options);options_ = options;bg_ = init_bg;ba_ = init_ba;g_ = gravity;cov_ = Mat18T::Identity() * 1e-4; // P}
- IESKF 协方差矩阵初始化 (在
上进行了额外处理)
/// 设置初始条件void IESKF::SetInitialConditions(Options options, const VecT& init_bg, const VecT& init_ba,const VecT& gravity = VecT(0, 0, -9.8)) {BuildNoise(options);options_ = options;bg_ = init_bg;ba_ = init_ba;g_ = gravity;cov_ = 1e-4 * Mat18T::Identity();// 设置 R 部分的协方差矩阵cov_.template block<3, 3>(6, 6) = 0.1 * math::kDEG2RAD * Mat3T::Identity();}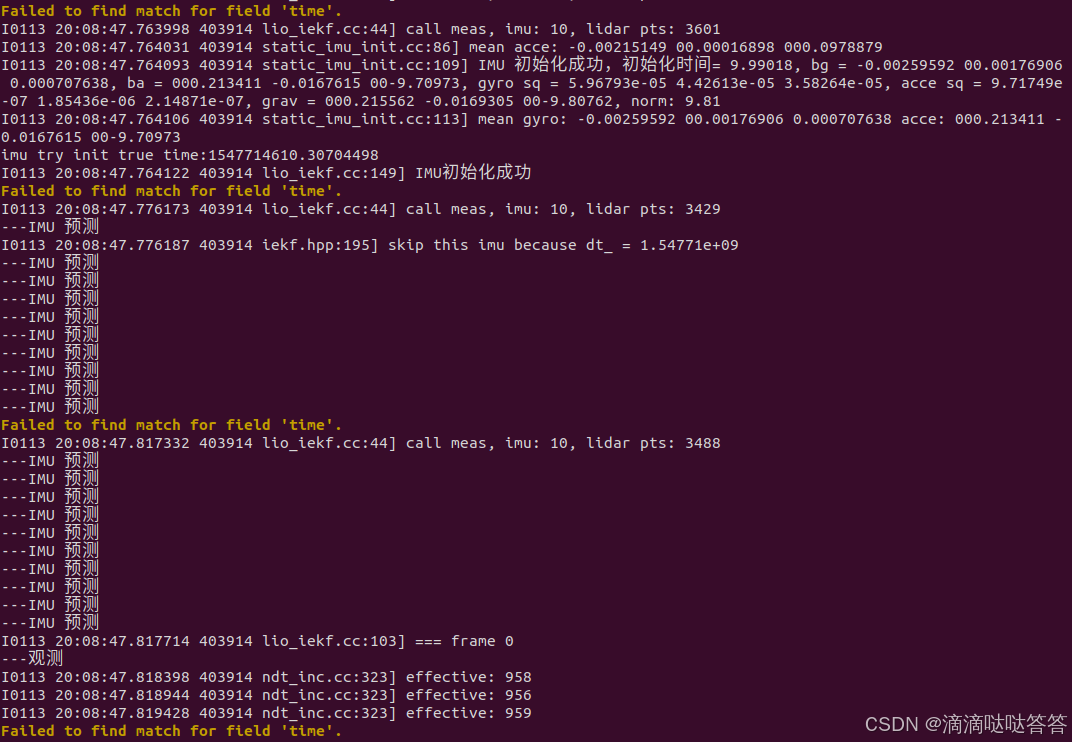
5.3 使用 IMU 预测位姿进行运动补偿
和 《自动驾驶与机器人中的SLAM技术》ch7:基于 ESKF 的松耦合 LIO 系统 中一模一样,不在介绍。
5.4 松耦合系统的配准部分
得到去畸变的点云后,将其作为 source 部分传递给增量 NDT 类 IncNdt3d ,然后开始滤波器的更新过程。在滤波器更新过程的第 次迭代过程中,首先调用IncNdt3d::ComputeResidualAndJacobians() 计算函数在 NDT 内部使用滤波器预测得到的先验位姿(首次)和更新后位姿(后续迭代)的计算点云残差
和
(和松耦合中不同,没有使用 增量 NDT 中的 IncNdt3d::AlignNdt() 配准函数迭代优化位姿)。然后将这两个表示点云残差的值传递到 IESKF 中,结合预测协方差矩阵
计算得到当前迭代过程的增量
,最后将增量代入名义状态变量
,进而得到下一次迭代的
和
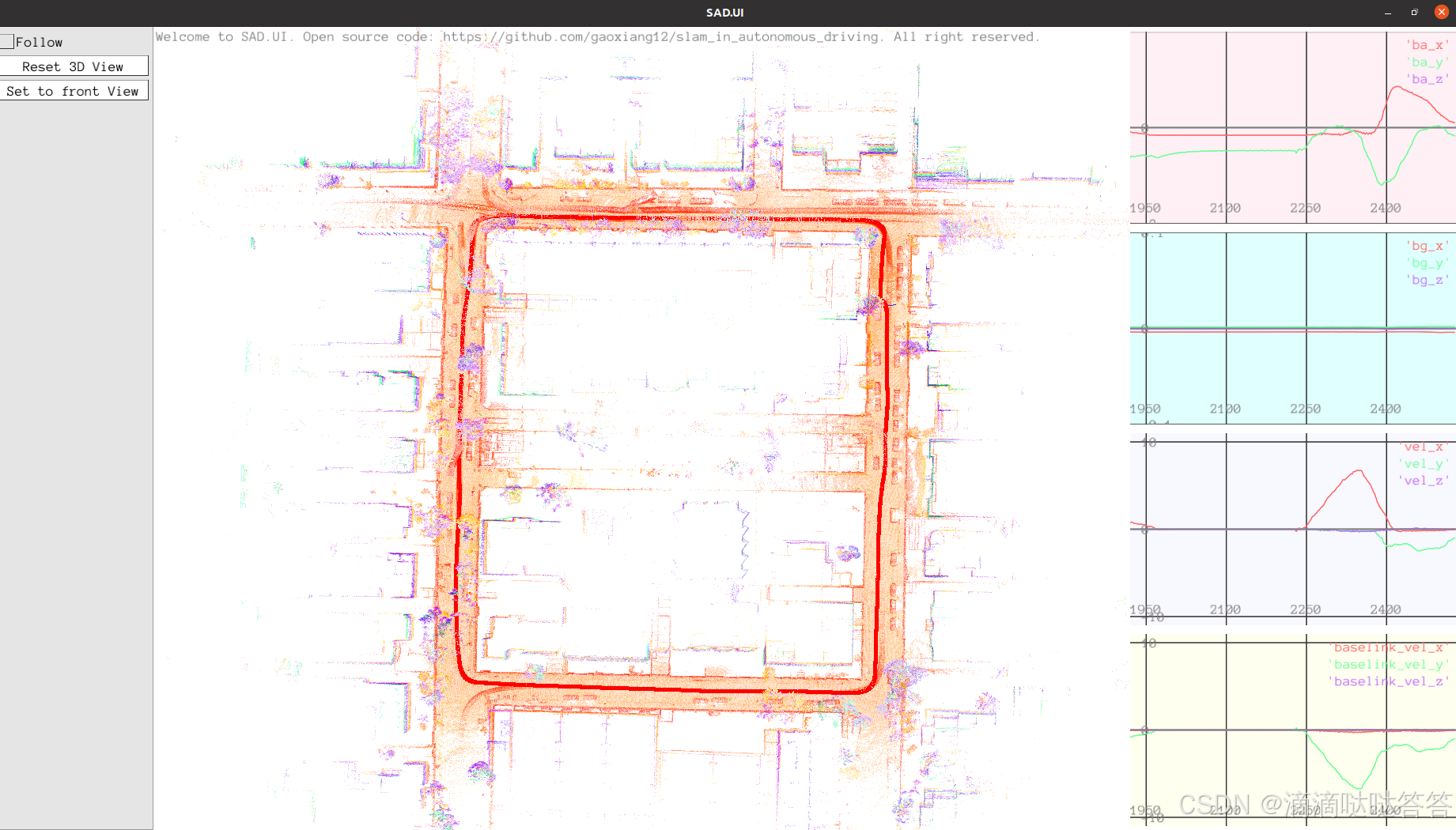
直到滤波器收敛。滤波器收敛后再根据卡尔曼公式计算得到后验位姿作为当前雷达 scan 的位姿。最后根据当前雷达 scan 的位姿判断 scan 是否为关键帧,若为关键帧则添加到 local map中。在这个过程中滤波器部分和 NDT 部分是耦合的,是将点云残差写入到了滤波器的观测过程中。
IncNdt3d::AlignNdt() 配准函数:将 IESKF 的预测的先验位姿 作为初始值,在 NDT 内部进行配准操作,迭代得到优化后位姿信息。
- 配准函数中迭代遍历当前雷达扫描 scan 中的点,计算每个点的 平方误差
和 雅可比矩阵
,根据
计算得到
从而迭代更新位姿信息。
ncNdt3d::ComputeResidualAndJacobians() 计算函数:在当前第 次迭代的过程中,根据 IESKF 的预测的先验位姿
,在 NDT 内部计算
(
)和
(
)。
- 计算函数不迭代,遍历当前雷达扫描 scan 中的点,计算每个点的 平方误差
和
在 NDT 内部计算
和
。
由于 NDT 点数要明显多于预测方程,这可能导致估计结果向 NDT 倾斜,我们给这里的信息矩阵 添加一个乘积因子(取 0.01),降低其权重,让更新部分更加平衡一些。
bool IncNdt3d::AlignNdt(SE3& init_pose) {LOG(INFO) << "aligning with inc ndt, pts: " << source_->size() << ", grids: " << grids_.size();assert(grids_.empty() == false);SE3 pose = init_pose;// 对点的索引,预先生成int num_residual_per_point = 1;if (options_.nearby_type_ == NearbyType::NEARBY6) {num_residual_per_point = 7;}std::vector<int> index(source_->points.size());for (int i = 0; i < index.size(); ++i) {index[i] = i;}// 我们来写一些并发代码int total_size = index.size() * num_residual_per_point;for (int iter = 0; iter < options_.max_iteration_; ++iter) {std::vector<bool> effect_pts(total_size, false);std::vector<Eigen::Matrix<double, 3, 6>> jacobians(total_size);std::vector<Vec3d> errors(total_size);std::vector<Mat3d> infos(total_size);// gauss-newton 迭代// 最近邻,可以并发std::for_each(std::execution::par_unseq, index.begin(), index.end(), [&](int idx) {auto q = ToVec3d(source_->points[idx]);Vec3d qs = pose * q; // 转换之后的q, map 坐标系下的点// 计算qs所在的栅格以及它的最近邻栅格Vec3i key = CastToInt(Vec3d(qs * options_.inv_voxel_size_));for (int i = 0; i < nearby_grids_.size(); ++i) {Vec3i real_key = key + nearby_grids_[i];// 和 local map 产生联系auto it = grids_.find(real_key);int real_idx = idx * num_residual_per_point + i;/// 这里要检查高斯分布是否已经估计if (it != grids_.end() && it->second->second.ndt_estimated_) { // 找到了并且高斯分布是否已经估计auto& v = it->second->second; // voxel,即 VoxelData 结构Vec3d e = qs - v.mu_; // 残差项// check chi2 thdouble res = e.transpose() * v.info_ * e; // 平方误差项if (std::isnan(res) || res > options_.res_outlier_th_) {effect_pts[real_idx] = false;continue;}// P259, (式 7.16)// build residualEigen::Matrix<double, 3, 6> J;J.block<3, 3>(0, 0) = -pose.so3().matrix() * SO3::hat(q);J.block<3, 3>(0, 3) = Mat3d::Identity();jacobians[real_idx] = J;errors[real_idx] = e;infos[real_idx] = v.info_; // VoxelData 中的协方差矩阵之逆effect_pts[real_idx] = true;} else {effect_pts[real_idx] = false;}}});// 累加Hessian和error,计算dxdouble total_res = 0;int effective_num = 0;Mat6d H = Mat6d::Zero();Vec6d err = Vec6d::Zero();for (int idx = 0; idx < effect_pts.size(); ++idx) {if (!effect_pts[idx]) {continue;}total_res += errors[idx].transpose() * infos[idx] * errors[idx];effective_num++;H += jacobians[idx].transpose() * infos[idx] * jacobians[idx];err += -jacobians[idx].transpose() * infos[idx] * errors[idx];}if (effective_num < options_.min_effective_pts_) {LOG(WARNING) << "effective num too small: " << effective_num;init_pose = pose;return false;}Vec6d dx = H.inverse() * err;pose.so3() = pose.so3() * SO3::exp(dx.head<3>()); // 右乘更新pose.translation() += dx.tail<3>();// 更新LOG(INFO) << "iter " << iter << " total res: " << total_res << ", eff: " << effective_num<< ", mean res: " << total_res / effective_num << ", dxn: " << dx.norm()<< ", dx: " << dx.transpose();if (dx.norm() < options_.eps_) {LOG(INFO) << "converged, dx = " << dx.transpose();break;}}init_pose = pose;return true;
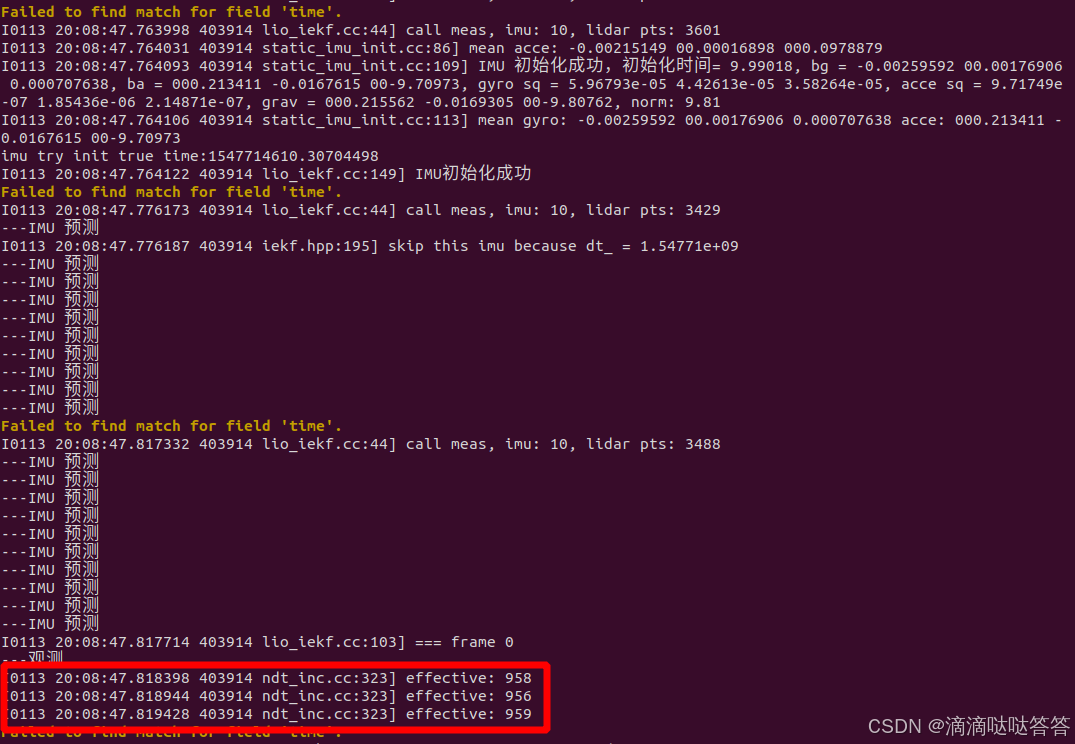
}void IncNdt3d::ComputeResidualAndJacobians(const SE3& input_pose, Mat18d& HTVH, Vec18d& HTVr) {assert(grids_.empty() == false);SE3 pose = input_pose;// 大部分流程和前面的 AlignNdt()函数 是一样的,只是会把z, H, R三者抛出去而非自己处理int num_residual_per_point = 1;if (options_.nearby_type_ == NearbyType::NEARBY6) {num_residual_per_point = 7;}std::vector<int> index(source_->points.size());for (int i = 0; i < index.size(); ++i) {index[i] = i;}int total_size = index.size() * num_residual_per_point;std::vector<bool> effect_pts(total_size, false);std::vector<Eigen::Matrix<double, 3, 18>> jacobians(total_size);std::vector<Vec3d> errors(total_size);std::vector<Mat3d> infos(total_size);// gauss-newton 迭代// 最近邻,可以并发std::for_each(std::execution::par_unseq, index.begin(), index.end(), [&](int idx) {auto q = ToVec3d(source_->points[idx]);Vec3d qs = pose * q; // 转换之后的q// 计算qs所在的栅格以及它的最近邻栅格Vec3i key = CastToInt(Vec3d(qs * options_.inv_voxel_size_));for (int i = 0; i < nearby_grids_.size(); ++i) {Vec3i real_key = key + nearby_grids_[i];auto it = grids_.find(real_key);int real_idx = idx * num_residual_per_point + i;/// 这里要检查高斯分布是否已经估计if (it != grids_.end() && it->second->second.ndt_estimated_) {auto& v = it->second->second; // voxel,即 VoxelData 结构Vec3d e = qs - v.mu_; // 残差项// check chi2 thdouble res = e.transpose() * v.info_ * e; // 平方误差项if (std::isnan(res) || res > options_.res_outlier_th_) {effect_pts[real_idx] = false;continue;}// build residualEigen::Matrix<double, 3, 18> J;J.setZero();J.block<3, 3>(0, 0) = Mat3d::Identity(); // 对pJ.block<3, 3>(0, 6) = -pose.so3().matrix() * SO3::hat(q); // 对Rjacobians[real_idx] = J;errors[real_idx] = e;infos[real_idx] = v.info_; // VoxelData 中的协方差矩阵之逆effect_pts[real_idx] = true;} else {effect_pts[real_idx] = false;}}});// 累加Hessian和error,计算dxdouble total_res = 0;int effective_num = 0;HTVH.setZero();HTVr.setZero();// 乘积因子const double info_ratio = 0.01; // 每个点反馈的info因子for (int idx = 0; idx < effect_pts.size(); ++idx) {if (!effect_pts[idx]) {continue;}total_res += errors[idx].transpose() * infos[idx] * errors[idx];effective_num++;// p314 (式8.18) (矩阵维度为18 * 18)HTVH += jacobians[idx].transpose() * infos[idx] * jacobians[idx] * info_ratio;// p314 (式8.20) (矩阵维度为18 * 1)HTVr += -jacobians[idx].transpose() * infos[idx] * errors[idx] * info_ratio;}LOG(INFO) << "effective: " << effective_num;
}
参考
自动驾驶与机器人中的SLAM技术--第八章--紧耦合LIO系统
相关文章:
《自动驾驶与机器人中的SLAM技术》ch8:基于 IESKF 的紧耦合 LIO 系统
目录 基于 IESKF 的紧耦合 LIO 系统 1 IESKF 的状态变量和运动过程 1.1 对名义状态变量的预测 1.2 对误差状态变量的预测及对协方差矩阵的递推 2 观测方程中的迭代过程 3 高维观测中的等效处理 4 NDT 和 卡尔曼滤波的联系 5 紧耦合 LIO 系统的主要流程 5.1 IMU 静止初始化 …...

引领图像编辑领域的新潮流!Edicho:实现跨图像一致编辑的新方法(港科蚂蚁)
在图像处理领域,如何实现跨图像的一致编辑一直是技术挑战。传统方法往往局限于单张图像的编辑,难以保证多张图像间编辑效果的一致性。香港科技大学、蚂蚁集团、斯坦福大学和香港中文大学联合提出Edicho,这一难题迎来了全新的解决方案。 总结如…...

459. 重复的子字符串【力扣】——kmp拼接字符串解法
常规kmp解答 class Solution { public:void getNext(int *next,string s){int j0;next[0]0;for(int i1;i<s.size();i){while(j>0 && s[i]!s[j]){jnext[j-1];}if(s[i]s[j]) j;next[i]j;}}bool repeatedSubstringPattern(string s) {if(s.size()0) return false;i…...

fpga 的时钟管理模块pll 跟 dcm
FPGA(Field-Programmable Gate Array,现场可编程门阵列)中的时钟管理模块(Clock Management Module, CMM)是用于生成和管理内部时钟信号的关键组件。两个常见的CMM类型是PLL(Phase-Locked Loop,…...

USB 驱动开发 --- Gadget 驱动框架梳理(一)
本文由 Linux 内核文档翻译与总结而来,个人学习笔记仅供参考。 Gadget 框架 在 USB 协议交互过程中,角色定义: the device driver is the master (or “client driver”) Linux 内核中称为 HCD(Host Controller Driver),负责与 …...

1Hive概览
1Hive概览 1hive简介2hive架构3hive与Hadoop的关系4hive与传统数据库对比5hive的数据存储 1hive简介 Hive是基于Hadoop的一个数据仓库工具,可以将结构化的数据文件映射为一张数据库表,并提供类SQL查询功能。 其本质是将SQL转换为MapReduce/Spark的任务进…...

【Web安全】SQL 注入攻击技巧详解:UNION 注入(UNION SQL Injection)
【Web安全】SQL 注入攻击技巧详解:UNION 注入(UNION SQL Injection) 引言 UNION注入是一种利用SQL的UNION操作符进行注入攻击的技术。攻击者通过合并两个或多个SELECT语句的结果集,可以获取数据库中未授权的数据。这种注入技术要…...

IoTDB 常见问题 QA 第三期
关于 IoTDB 的 Q & A IoTDB Q&A 第三期持续更新!我们将定期汇总我们将定期汇总社区讨论频繁的问题,并展开进行详细回答,通过积累常见问题“小百科”,方便大家使用 IoTDB。 Q1:查询最新值 & null 数据相加方…...

RabbitMQ---消息确认和持久化
(一)消息确认 1.概念 生产者发送消息后,到达消费端会有以下情况: 1.消息处理成功 2.消息处理异常 如果RabbitMQ把消息发送给消费者后就把消息删除,那么就可能会导致,消息处理异常想要再获取这条消息的时…...

《鸿蒙Next旅游应用:人工智能赋能个性化与智能导览新体验》
随着鸿蒙Next的推出,旅游应用迎来了全新的发展机遇,借助人工智能技术能为用户带来更出色的个性化推荐和智能导览服务。 鸿蒙Next与人工智能融合优势 鸿蒙Next拥有强大的分布式能力和原生智能体验。其能打破设备界限,实现多设备协同…...

微信小程序获取当前页面路径,登录成功后重定向回原页面
🤵 作者:coderYYY 🧑 个人简介:前端程序媛,目前主攻web前端,后端辅助,其他技术知识也会偶尔分享🍀欢迎和我一起交流!🚀(评论和私信一般会回&#…...

【9.2】Golang后端开发系列--Gin路由定义与实战使用
文章目录 一、Gin 框架路由的基本定义方式1. 简单路由创建2. 路由参数3. 查询参数 二、商业大项目中的路由定义和服务调用1. 路由模块化2. 路由组和中间件3. 中间件的使用4. 服务层调用5. 错误处理6. 版本控制7. 路由注册 一、Gin 框架路由的基本定义方式 1. 简单路由创建 使…...

【微信小程序】let和const-综合实训
let 和 const 都是用于声明变量的关键字,它们与传统的 var 关键字相比,有很多不同之处。 let 声明块级作用域变量,可再赋值;const 声明块级作用域常量,不可再赋值。 以下是它们的详细介绍: 一、基本概念…...

图匹配算法(涵盖近似图匹配)
【图数据管理与挖掘-第四讲(子)图匹配算法(涵盖近似图匹配) 北京大学2021暑期-邹磊教授】https://www.bilibili.com/video/BV1zh411q7PW?vd_source7c2b5de7032bf3907543a7675013ce3a 图同构: 定义: 给定…...

java线程——Thread
java线程——Thread 基本步骤示例优劣总结 继承Thread类是Java中实现多线程的一种方式。使用时创建一个新的类,该类继承自java.lang.Thread,并重写其run()方法,在方法中定义线程执行的任务逻辑。 基本步骤 1、创建一个子类:定义一…...

MySQL8.0新特性
第十八章_MySQL8.0新特性 1.新特性概述 1. 数据库管理和存储 1.1 数据字典 特性: MySQL 8.0 使用统一的数据字典存储元数据(如表、列、索引等),并将其存储在 InnoDB 表中。 优点 : 提升性能:减少对文件系统的依赖。 提高一致…...

Oracle EBS GL定期盘存WIP日记账无法过账数据修复
系统环境 RDBMS : 12.1.0.2.0 Oracle Applications : 12.2.6 问题症状 用户反映来源为“定期盘存”和类别为“WIP”的日记账无法过账,标准日记账的界面上的过账按钮灰色不可用。但是,在超级用户职责下,该日记账又可以过账,细心检查发现该业务实体下有二个公司段值15100和…...

【绝对无坑】Mongodb获取集合的字段以及数据类型信息
Mongodb获取集合的字段以及数据类型信息 感觉很LOW的一个数据仓工具seatunel,竟然不能自动读取mongodb的表结构信息,需要手工创建。 然鹅,本人对mongodb也是新手,很多操作也不知所措,作为一个DBA,始终还是…...

【Git版本控制器--1】Git的基本操作--本地仓库
目录 初识git 本地仓库 认识工作区、暂存区、版本库 add操作与commit操作 master文件与commit id 修改文件 版本回退 撤销修改 删除文件 初识git Git 是一个分布式版本控制系统,主要用于跟踪文件的更改,特别是在软件开发中。 为什么要版本…...

C++并发编程之无锁数据结构及其优缺点
在C并发编程中,无锁数据结构(Lock-free Data Structures)是指那些在实现中不使用互斥锁(如std::mutex)来保证线程安全的数据结构。相反,它们利用原子操作和内存模型来确保多线程环境下的正确性和高效性。下…...

Omni-Vision Sanctuary 在 Proteus 仿真中的应用:智能电路设计与调试助手
Omni-Vision Sanctuary 在 Proteus 仿真中的应用:智能电路设计与调试助手 1. 电子工程师的新助手 作为一名电子工程师,你是否经历过这样的场景:面对一个功能需求,花了大量时间查阅资料却找不到合适的电路方案;仿真波…...

IDM注册表权限控制技术深度解析:突破30天试用期的终极方案
IDM注册表权限控制技术深度解析:突破30天试用期的终极方案 【免费下载链接】IDM-Activation-Script IDM Activation & Trail Reset Script 项目地址: https://gitcode.com/gh_mirrors/id/IDM-Activation-Script 核心技术原理:Windows注册表权…...

【PCIE系列】深入解析接收端检测:从电路原理到实战验证
1. PCIE接收端检测机制的核心原理 当你把一根USB线插入电脑时,系统瞬间就能识别到设备连接——这种看似简单的操作背后,隐藏着PCIE接收端检测的精妙机制。作为硬件工程师,我经常需要调试这种看似简单实则复杂的链路检测问题。接收端检测本质上…...

不只是CTF:用Kali+Pwntools+GDB-Peda搭建你的第一个漏洞分析实验台
从CTF到实战:构建专业级二进制漏洞分析实验环境 在安全研究领域,CTF比赛中的Pwn挑战只是冰山一角。真正的价值在于将这些技能应用于现实世界的漏洞分析和利用。本文将带你搭建一个专业级的本地漏洞分析实验环境,这个环境不仅能应对CTF题目&a…...

千问3.5-2B开源可部署:模型权重托管远端,升级只需替换配置不重拉镜像
千问3.5-2B开源可部署:模型权重托管远端,升级只需替换配置不重拉镜像 1. 模型概述 千问3.5-2B是Qwen系列中的小型视觉语言模型,具备图片理解与文本生成能力。这个开源模型特别适合需要快速部署视觉理解功能的开发者,它能够&…...

如何快速掌握mruby生态系统:第三方库、工具和资源的完整指南
如何快速掌握mruby生态系统:第三方库、工具和资源的完整指南 【免费下载链接】mruby Lightweight Ruby 项目地址: https://gitcode.com/gh_mirrors/mr/mruby mruby是一个轻量级的Ruby实现,专为嵌入式系统和资源受限环境设计。这个强大的轻量级Rub…...

如何用Obsidian PDF++插件打造终极PDF阅读与标注体验
如何用Obsidian PDF插件打造终极PDF阅读与标注体验 【免费下载链接】obsidian-pdf-plus PDF: the most Obsidian-native PDF annotation & viewing tool ever. Comes with optional Vim keybindings. 项目地址: https://gitcode.com/gh_mirrors/ob/obsidian-pdf-plus …...

FireRedASR-AED-L从零开始教程:无需Python环境,镜像开箱即用识别中英混合语音
FireRedASR-AED-L从零开始教程:无需Python环境,镜像开箱即用识别中英混合语音 你是不是经常遇到这样的场景?手头有一段重要的会议录音,里面既有中文讨论,又夹杂着几个英文专业术语,想把它转成文字却找不到…...

5分钟掌握B站评论区智能成分检测:免费高效的互动神器
5分钟掌握B站评论区智能成分检测:免费高效的互动神器 【免费下载链接】bilibili-comment-checker B站评论区自动标注成分,支持动态和关注识别以及手动输入 UID 识别 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-comment-checker B站成…...
)
手把手教你用Strongswan App通过IKEv2 EAP认证连接Freeradius(附调试技巧)
移动端安全连接实战:Strongswan与Freeradius的IKEv2 EAP认证深度配置指南 在移动办公日益普及的今天,企业级VPN解决方案需要兼顾安全性与易用性。Strongswan作为开源的IPsec实现,配合Freeradius进行EAP认证,能够为Android设备提供…...