【STM32-学习笔记-4-】PWM、输入捕获(PWMI)
文章目录
- 1、PWM
- PWM配置
- 2、输入捕获配置
- 3、编码器
1、PWM

PWM配置
- 配置时基单元
- 配置输出比较单元
- 配置输出PWM波的端口
#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{
//**配置输出PWM波的端口*****************************************************************RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOA, ENABLE);// 使能GPIOA端口的时钟,因为我们要使用这个端口来输出PWM信号GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStruct);
//*************************************************************************************
//**配置时基单元************************************************************************RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能时钟TIM_InternalClockConfig(TIM2);// 配置定时器的内部时钟模式//这段代码的作用是将指定的定时器配置为内部时钟模式,即将定时器的时钟源设置为内部时钟,而不是外部信号TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;//定义定时器基本时间配置结构体TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;//设置定时器时钟分频(1分频)TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//计数模式(向上计数)TIM_TimeBaseInitStruct.TIM_Period = 100 - 1;//自动重装载寄存器的值ARRTIM_TimeBaseInitStruct.TIM_Prescaler = 720 - 1;//预分频器的值PSC//1khz TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);
//*************************************************************************************
//**配置输出比较单元********************************************************************TIM_OCInitTypeDef TIM_OCInitStruct;//定义输出比较初始化结构体TIM_OCStructInit(&TIM_OCInitStruct);//结构体赋初始值TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;//输出比较模式TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//输出比较极性TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//输出使能TIM_OCInitStruct.TIM_Pulse = 0;//设定CCR寄存器的值;更改CRR的值,以控制占空比(CCR/(ARR+1))TIM_OC1Init(TIM2, &TIM_OCInitStruct);
//*************************************************************************************TIM_Cmd(TIM2, ENABLE);//启用定时器,PB0口输出PWM波
}void PWM_SetCompare1(uint16_t Compare)//设置CRR的值以控制占空比(CCR/(ARR+1))
{TIM_SetCompare1(TIM2, Compare);
}2、输入捕获配置
#include "stm32f10x.h" // Device header
//PWMI模式
//输入捕获测频率 PA6口void IC_Init(void)
{//配置输入捕获的io口RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;//PA6对应TIM3GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);//配置时基单元RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//开启时钟TIM_InternalClockConfig(TIM3);//配置定时器的内部时钟模式//这段代码的作用是将指定的定时器配置为内部时钟模式,//即将定时器的时钟源设置为内部时钟,而不是外部信号TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;//1分频TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//计数模式(向上计数)TIM_TimeBaseInitStruct.TIM_Period = 65536 - 1;//自动重装载寄存器的值ARRTIM_TimeBaseInitStruct.TIM_Prescaler = 72 - 1;//预分频器的值PSC TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);//配置输入捕获单元TIM_ICInitTypeDef TIM_ICInitStruct;TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;//选择通道1TIM_ICInitStruct.TIM_ICFilter = 0x10;//指定输入捕获过滤器TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;//上升沿TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;//1分频TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;//直连通道TIM_ICInit(TIM3, &TIM_ICInitStruct);//自动配置通道2,下降沿TIM_PWMIConfig(TIM3, &TIM_ICInitStruct);//设置触发源TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1);//选择从模式TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);//启动定时器TIM_Cmd(TIM3, ENABLE);
//*************************************************************************************
}uint32_t IC_GetFreq(void)//获取频率
{return 1000000 / ((TIM_GetCapture1(TIM3)) + 1);//TIM_GetCapture1此函数可获取CCR1捕获/比较器中的值
}uint32_t IC_GetDuty(void)
{return ((TIM_GetCapture2(TIM3) + 1) * 100)/(TIM_GetCapture1(TIM3) + 1);
}


3、编码器
#include "stm32f10x.h" // Device headervoid Encoder2_Init(void)
{//配置GPIORCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);//配置时基单元RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//开启定时器时钟TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;//不分频TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStruct.TIM_Period = 65536 - 1;//ARRTIM_TimeBaseInitStruct.TIM_Prescaler = 1 - 1;//PSCTIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);TIM_ICInitTypeDef TIM_ICInitStruct;TIM_ICStructInit(&TIM_ICInitStruct);//配置通道1的滤波器和极性TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;TIM_ICInitStruct.TIM_ICFilter = 0xF;TIM_ICInit(TIM3, &TIM_ICInitStruct);//配置通道2的滤波器和极性 TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;TIM_ICInitStruct.TIM_ICFilter = 0xF;TIM_ICInit(TIM3, &TIM_ICInitStruct);TIM_EncoderInterfaceConfig( TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, //不反向TIM_ICPolarity_Rising);//不反向-可控制极性TIM_Cmd(TIM3, ENABLE);
}int16_t Encoder_Get(void)
{return TIM_GetCounter(TIM3);
}int16_t Encoder_GetSpeed(void)
{int16_t Temp_Count = TIM_GetCounter(TIM3);TIM_SetCounter(TIM3, 0);//计数器清零return Temp_Count;}


相关文章:
【STM32-学习笔记-4-】PWM、输入捕获(PWMI)
文章目录 1、PWMPWM配置 2、输入捕获配置3、编码器 1、PWM PWM配置 配置时基单元配置输出比较单元配置输出PWM波的端口 #include "stm32f10x.h" // Device headervoid PWM_Init(void) { //**配置输出PWM波的端口**********************************…...
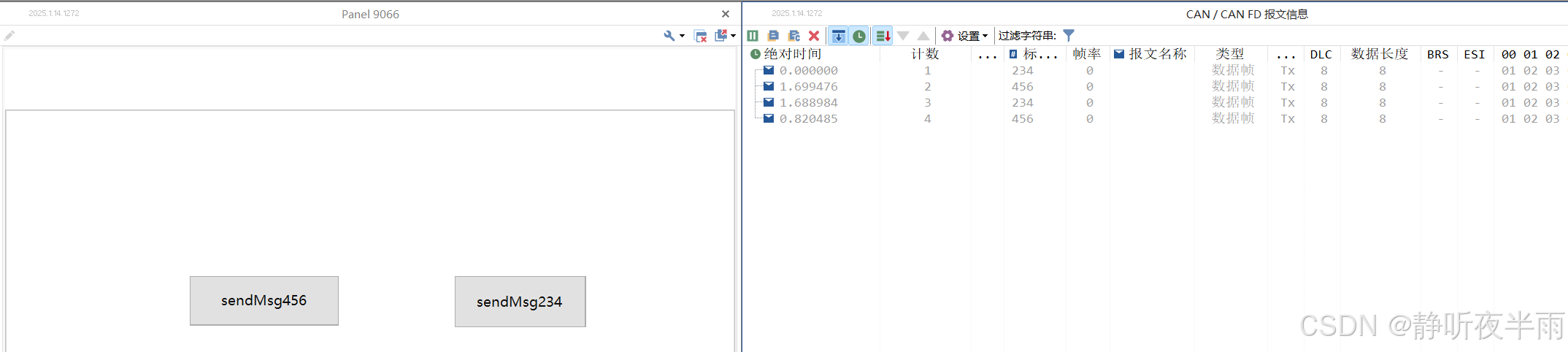
TOSUN同星TsMaster使用入门——3、使用系统变量及c小程序结合panel面板发送报文
本篇内容将介绍TsMaster中常用的Panel面板控件以及使用Panel控件通过系统变量以及c小程序来修改信号的值,控制报文的发送等。 目录 一、常用的Panel控件介绍 1.1系统——启动停止按钮 1.2 显示控件——文本框 1.3 显示控件——分组框 1.4 读写控件——按钮 1.…...

【Web】2025-SUCTF个人wp
目录 SU_blog SU_photogallery SU_POP SU_blog 先是注册功能覆盖admin账号 以admin身份登录,拿到读文件的权限 ./article?filearticles/..././..././..././..././..././..././etc/passwd ./article?filearticles/..././..././..././..././..././..././proc/1…...

React进阶之react.js、jsx模板语法及babel编译
React React介绍React官网初识React学习MVCMVVM JSX外部的元素props和内部的状态statepropsstate 生命周期constructorgetDerivedStateFromPropsrendercomponentDidMount()shouldComponentUpdategetSnapshotBeforeUpdate(prevProps, prevState) 创建项目CRA:create-…...

在Linux上如何让ollama在GPU上运行模型
之前一直在 Mac 上使用 ollama 所以没注意,最近在 Ubuntu 上运行发现一直在 CPU 上跑。我一开始以为是超显存了,因为 Mac 上如果超内存的话,那么就只用 CPU,但是我发现 Llama3.2 3B 只占用 3GB,这远没有超。看了一下命…...

R 语言科研绘图第 20 期 --- 箱线图-配对
在发表科研论文的过程中,科研绘图是必不可少的,一张好看的图形会是文章很大的加分项。 为了便于使用,本系列文章介绍的所有绘图都已收录到了 sciRplot 项目中,获取方式: R 语言科研绘图模板 --- sciRplothttps://mp.…...

suctf2025
Suctf2025 --2标识为看的wp,没环境复现了 所有参考资料将在文本末尾标明 WEB SU_photogallery 思路👇 构造一个压缩包,解压出我们想解压的部分,然后其他部分是损坏的,这样是不是就可以让整个解压过程是出错的从而…...

Quinlan C4.5剪枝U(0,6)U(1,16)等置信上限如何计算?
之前看到Quinlan中关于C4.5决策树算法剪枝环节中,关于错误率e置信区间估计,为啥 当E=0时,U(0,1)=0.75,U(0,6)=0.206,U(0,9)=0.143? 而当E不为0时,比如U(1,16)=0.157,如图: 关于C4.5决策树,Quinlan写了一本书,如下: J. Ross Quinlan (Auth.) - C4.5. Programs f…...

计算机组成原理--笔记二
目录 一.计算机系统的工作原理 二.计算机的性能指标 1.存储器的性能指标 2.CPU的性能指标 3.系统整体的性能指标(静态) 4.系统整体的性能指标(动态) 三.进制计算 1.任意进制 > 十进制 2.二进制 <> 八、十六进制…...

麒麟系统中删除权限不够的文件方法
在麒麟系统中删除权限不够的文件,可以尝试以下几种方法: 通过修改文件权限删除 打开终端:点击左下角的“终端”图标,或者通过搜索功能找到并打开终端 。定位文件:使用cd命令切换到文件所在的目录 。修改文件权限&…...

自定义提示确认弹窗-vue
最初可运行代码 弹窗组件代码: (后来发现以下代码可运行,但打包 typescript 类型检查出错,可打包的代码在文末) <template><div v-if"isVisible" class"dialog"><div class&quo…...

运行fastGPT 第五步 配置FastGPT和上传知识库 打造AI客服
运行fastGPT 第五步 配置FastGPT和上传知识库 打造AI客服 根据上一步的步骤,已经调试了ONE API的接口,下面,我们就登陆fastGPT吧 http://xxx.xxx.xxx.xxx:3000/ 这个就是你的fastGPT后台地址,可以在configer文件中找到。 账号是…...

CSS 合法颜色值
CSS 颜色 CSS 中的颜色可以通过以下方法指定: 十六进制颜色带透明度的十六进制颜色RGB 颜色RGBA 颜色HSL 颜色HSLA 颜色预定义/跨浏览器的颜色名称使用 currentcolor 关键字 十六进制颜色 用 #RRGGBB 规定十六进制颜色,其中 RR(红色&…...

Redis - General - 未授权访问漏洞(用户配置问题)
0x01:产品简介 Redis(Remote Dictionary Service,远程数据服务),是一款开源的基于内存的键值对存储系统,其主要被用作高性能缓存服务器使用(比如作为消息中间件和用于 Session 共享)…...

解决 WSL 2 中 Ubuntu 22.04 安装 Docker 后无法启动的问题
问题场景 安装Docker后,执行sudo service docker start启动Docker,提示启动成功 rootDev:~# sudo service docker start * Starting Docker: docker [ OK ]执行su…...

Conda的一些常用命令
以下是Conda的一些常用命令: pip freeze > requirements.txt pip install -r requirements.txt 基本信息查看类 查看conda版本: conda -V 或 conda --version 可以查看当前安装的conda版本。 查看conda帮助信息: conda -h 或 conda --he…...

AI 大爆发时代,音视频未来路在何方?
AI 大模型突然大火了 回顾2024年,计算机领域最大的变革应该就是大模型进一步火爆了。回顾下大模型的发展历程: 萌芽期:(1950-2005) 1956年:计算机专家约翰麦卡锡首次提出“人工智能”概念,标志…...

Invicti-Professional-V25.1
01 更新介绍 此更新包括对内部代理的更改。内部扫描代理的当前版本为 25.1.0。内部身份验证验证程序代理的当前版本为 25.1.0。#新功能现在,单击扫描摘要屏幕中的预设扫描图标会将您重定向到具有过滤视图的 “最近扫描” 页面,从而改进导航和对相关扫描…...

【版图设计】2025年 最新 Cadence Virtuoso IC617 虚拟机环境配置全过程 集成电路版图设计环境配置
一、Cadence Virtuoso IC617 是什么? Cadence Virtuoso 是一个电子设计自动化(EDA)工具,主要用于集成电路(IC)的设计和仿真,尤其是在模拟、混合信号和射频(RF)电路设计领…...

Python基本概念与实践
Python语言,总给我一种“嗯?还能这么玩儿?”的感觉 Python像一个二三十岁的年轻人,自由、年轻、又灵活 欢迎一起进入Python的世界~ 本人工作中经常使用Python,针对一些常用的语法概念进行持续记录。 目录 一、类与常…...

基于2D工程图几何特征与梯度提升模型的制造成本智能预测
1. 项目概述:从图纸到报价的智能革命在制造业,尤其是像汽车零部件这样的离散制造领域,报价速度直接决定了订单的生死。传统上,拿到一张新的2D工程图(DWG格式),成本工程师需要花上几天甚至几周时…...
)
第二周(第12周)
1.单电源供电的二阶低通滤波器2.功率放大电路...

Vue3 图片标框功能实现方案
基于 Vue3 组合式 API 的图片标框(画框、标注、选框)完整实现,核心逻辑封装在 GetBoxes 组件里,复制就能用 一、功能说明 ✅ 在图片上鼠标拖拽画矩形框 ✅ 实时显示框坐标(x, y, width, height) ✅ 支持多…...

HDI 高密度互连板阶数的深度理解
一、概述高密度互连板(High Density Interconnector, HDI)是通过激光微孔技术和逐层积层工艺实现高密度布线的印制电路板。其阶数划分是行业内统一的技术标准,核心依据为独立积层压合次数与配套激光盲孔制程次数,而非单面层数或钻…...

收藏干货|2026 版企业 AI 落地实操指南,程序员小白入门避坑必备
如今人工智能早已脱离概念炒作阶段,全面扎根企业实际业务场景,成为技术从业者与企业管理者无法回避的发展课题。各行各业都加速布局AI赛道,行业心态也从初期观望试探,彻底转变为实打实的落地攻坚。 不少企业高层主动牵头统筹AI规划…...

Qri高级功能:如何使用JSON Schema验证和描述数据集结构
Qri高级功能:如何使用JSON Schema验证和描述数据集结构 【免费下载链接】qri youre invited to a data party! 项目地址: https://gitcode.com/gh_mirrors/qr/qri Qri是一个强大的开源数据协作工具,它提供了丰富的功能来帮助用户管理、共享和验证…...

终极免费音乐解锁工具:打破平台枷锁,让音乐重获自由
终极免费音乐解锁工具:打破平台枷锁,让音乐重获自由 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地…...

基于Max78000与规则引导的音频数据集构建:边缘AI声音识别实战
1. 项目概述:当边缘AI遇见棕榈树里的“窃听者”在边缘计算和物联网设备大行其道的今天,我们常常面临一个核心矛盾:一方面,我们希望设备足够“聪明”,能实时识别并响应特定的声音模式,比如工厂里高压阀门的异…...

三步破解百度网盘限速:免费获取真实下载链接的终极指南
三步破解百度网盘限速:免费获取真实下载链接的终极指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的龟速下载而苦恼吗?想要彻…...
)
大模型测试新范式:Claude端到端验证的5层断言体系(语义一致性/上下文连贯性/安全边界/成本阈值/时序鲁棒性)
更多请点击: https://codechina.net 第一章:大模型测试新范式:Claude端到端验证的5层断言体系(语义一致性/上下文连贯性/安全边界/成本阈值/时序鲁棒性) 传统LLM测试常聚焦于准确率或BLEU等静态指标,而Cla…...