亚博microros小车-原生ubuntu支持系列:7-脸部检测
背景知识
官网介绍:
Face Mesh - mediapipe

mpFaceMesh.FaceMesh() 类的参数有:self.staticMode, self.maxFaces, self.minDetectionCon, self.minTrackCon
staticMode:是否将每帧图像作为静态图像处理。如果为 True,每帧都会进行人脸检测;如果为 False,在检测到人脸后进行跟踪,速度更快
maxFaces:要检测的最大人脸数量
minDetectionCon:检测的最小置信度阈值。低于此值的人脸将被忽略
minTrackCon:跟踪的最小置信度阈值。低于此值的跟踪将被忽略
import cv2
import mediapipe as mpmp_drawing = mp.solutions.drawing_utils#绘图工具
mp_facemesh = mp.solutions.face_mesh
#手部模型
faceMesh = mp_facemesh.FaceMesh(static_image_mode=False,max_num_faces=2,min_detection_confidence=0.75,min_tracking_confidence=0.75)cap = cv2.VideoCapture(0)#打开默认摄像头
while True:ret,frame = cap.read()#读取一帧图像#图像格式转换frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)# 因为摄像头是镜像的,所以将摄像头水平翻转# 不是镜像的可以不翻转frame= cv2.flip(frame,1)#输出结果results = faceMesh.process(frame)frame = cv2.cvtColor(frame, cv2.COLOR_RGB2BGR)if results.multi_face_landmarks:for face_landmarks in results.multi_face_landmarks:# 关键点可视化mp_drawing.draw_landmarks(frame, face_landmarks, mp_facemesh.FACEMESH_CONTOURS)cv2.imshow('MediaPipe face', frame)if cv2.waitKey(1) & 0xFF == 27:break
cap.release()这几个基本格式类似的,就是换个模型,输出结果不同
效果:

脸部检测
src/yahboom_esp32_mediapipe/yahboom_esp32_mediapipe/目录下新建文件04_FaceMesh.py
代码如下
#!/usr/bin/env python3
# encoding: utf-8
#import ros lib
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Point
import mediapipe as mp
#import define msg
from yahboomcar_msgs.msg import PointArray
#import commom lib
import cv2 as cv
import numpy as np
import time
from cv_bridge import CvBridge
from sensor_msgs.msg import Image, CompressedImagefrom rclpy.time import Time
import datetimeprint("import done")class FaceMesh(Node):def __init__(self, name,staticMode=False, maxFaces=2, minDetectionCon=0.5, minTrackingCon=0.5):super().__init__(name)self.mpDraw = mp.solutions.drawing_utils#画图self.mpFaceMesh = mp.solutions.face_mesh#模型初始化self.faceMesh = self.mpFaceMesh.FaceMesh(static_image_mode=staticMode,max_num_faces=maxFaces,min_detection_confidence=minDetectionCon,min_tracking_confidence=minTrackingCon )self.pub_point = self.create_publisher(PointArray,'/mediapipe/points',1000)self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=3)self.drawSpec = self.mpDraw.DrawingSpec(color=(0, 255, 0), thickness=1, circle_radius=1)def pubFaceMeshPoint(self, frame, draw=True):pointArray = PointArray()img = np.zeros(frame.shape, np.uint8)imgRGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB)self.results = self.faceMesh.process(imgRGB)#检测if self.results.multi_face_landmarks:for i in range(len(self.results.multi_face_landmarks)):#输出关键点if draw: self.mpDraw.draw_landmarks(frame, self.results.multi_face_landmarks[i], self.mpFaceMesh.FACEMESH_CONTOURS, self.lmDrawSpec, self.drawSpec)self.mpDraw.draw_landmarks(img, self.results.multi_face_landmarks[i], self.mpFaceMesh.FACEMESH_CONTOURS, self.lmDrawSpec, self.drawSpec)for id, lm in enumerate(self.results.multi_face_landmarks[i].landmark):point = Point()point.x, point.y, point.z = lm.x, lm.y, lm.zpointArray.points.append(point)self.pub_point.publish(pointArray)return frame, imgdef frame_combine(slef,frame, src):if len(frame.shape) == 3:frameH, frameW = frame.shape[:2]srcH, srcW = src.shape[:2]dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8)dst[:, :frameW] = frame[:, :]dst[:, frameW:] = src[:, :]else:src = cv.cvtColor(src, cv.COLOR_BGR2GRAY)frameH, frameW = frame.shape[:2]imgH, imgW = src.shape[:2]dst = np.zeros((frameH, frameW + imgW), np.uint8)dst[:, :frameW] = frame[:, :]dst[:, frameW:] = src[:, :]return dstclass MY_Picture(Node):def __init__(self, name):super().__init__(name)self.bridge = CvBridge()self.sub_img = self.create_subscription(CompressedImage, '/espRos/esp32camera', self.handleTopic, 1) #获取esp32传来的图像self.last_stamp = Noneself.new_seconds = 0self.fps_seconds = 1self.face_mesh = FaceMesh('face_mesh')def handleTopic(self, msg):self.last_stamp = msg.header.stamp if self.last_stamp:total_secs = Time(nanoseconds=self.last_stamp.nanosec, seconds=self.last_stamp.sec).nanosecondsdelta = datetime.timedelta(seconds=total_secs * 1e-9)seconds = delta.total_seconds()*100if self.new_seconds != 0:self.fps_seconds = seconds - self.new_secondsself.new_seconds = seconds#保留这次的值start = time.time()frame = self.bridge.compressed_imgmsg_to_cv2(msg)frame = cv.resize(frame, (640, 480))cv.waitKey(10)frame, img = self.face_mesh.pubFaceMeshPoint(frame,draw=False)end = time.time()fps = 1 / ((end - start)+self.fps_seconds)text = "FPS : " + str(int(fps))cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)dist = self.face_mesh.frame_combine(frame, img)cv.imshow('dist', dist)# print(frame)cv.waitKey(10)def main():print("start it")rclpy.init()esp_img = MY_Picture("My_Picture")try:rclpy.spin(esp_img)except KeyboardInterrupt:passfinally:esp_img.destroy_node()rclpy.shutdown()
订阅esp32传出来的图像后,通过MediaPipe去做相关的识别后显示。主体流程跟之前一样,换了检测模型。
构建后运行:ros2 run yahboom_esp32_mediapipe FaceMesh
效果如下

相关文章:
亚博microros小车-原生ubuntu支持系列:7-脸部检测
背景知识 官网介绍: Face Mesh - mediapipe mpFaceMesh.FaceMesh() 类的参数有:self.staticMode, self.maxFaces, self.minDetectionCon, self.minTrackCon staticMode:是否将每帧图像作为静态图像处理。如果为 True,每帧都会进行人脸检测…...
第二届国赛铁三wp
第二届国赛 缺东西去我blog找👇 第二届长城杯/铁三 | DDLS BLOG web Safe_Proxy 源码题目 from flask import Flask, request, render_template_stringimport socketimport threadingimport htmlapp Flask(__name__)app.route(/, methods"GET"])de…...

缓存商品、购物车(day07)
缓存菜品 问题说明 问题说明:用户端小程序展示的菜品数据都是通过查询数据库获得,如果用户端访问量比较大,数据库访问压力随之增大。 结果: 系统响应慢、用户体验差 实现思路 通过Redis来缓存菜品数据,减少数据库查询…...

4【编程语言的鄙视链原因解析】
在编程行业中,是存在鄙视链的,技术越好的圈子越不明显,技术越差的圈子越明显,很多时候为新人营造了错误的观点,我们来针对此类现象为新人们讲解原因 ①心里落差:比如你是学厨师的 你经过过年努力练…...

美团一面面经
第一个问题:介绍一下最近做的项目 第二个问题:我对你项目有个地方比较感兴趣啊。就是你用的那个二级缓存,你的吞吐量有多大啊,为什么需要使用二级缓存? 答: 在二级缓存策略下,笔记详情接口的吞…...

什么是报文的大端和小端,有没有什么记忆口诀?
在计算机科学中,**大端(Big-Endian)和小端(Little-Endian)**是两种不同的字节序(即多字节数据在内存中的存储顺序)。理解这两种字节序对于网络通信、文件格式解析以及跨平台编程等非常重要。 1…...

Spring中BeanFactory和ApplicationContext的区别
目录 一、功能范围 二、Bean的加载时机 三、国际化支持 四、事件发布 五、资源加载 六、使用场景说明 在Spring框架中,BeanFactory和ApplicationContext是两种常见的容器实现方式,它们在功能和使用场景上存在一些显著的差异。本文将详细解析这两种容…...
期货行业专题|基于超融合实现 IT 基础设施现代化与国产化转型实践合集
SmartX 期货行业重要进展 帮助近 60 家期货用户部署 730 超融合节点,含 230 信创节点。 深入 5 大应用场景: 核心生产资源池 主席灾备资源池 信创云资源池 云原生存储与容器资源池 分布式存储资源池 更多超融合金融核心生产业务场景实践…...
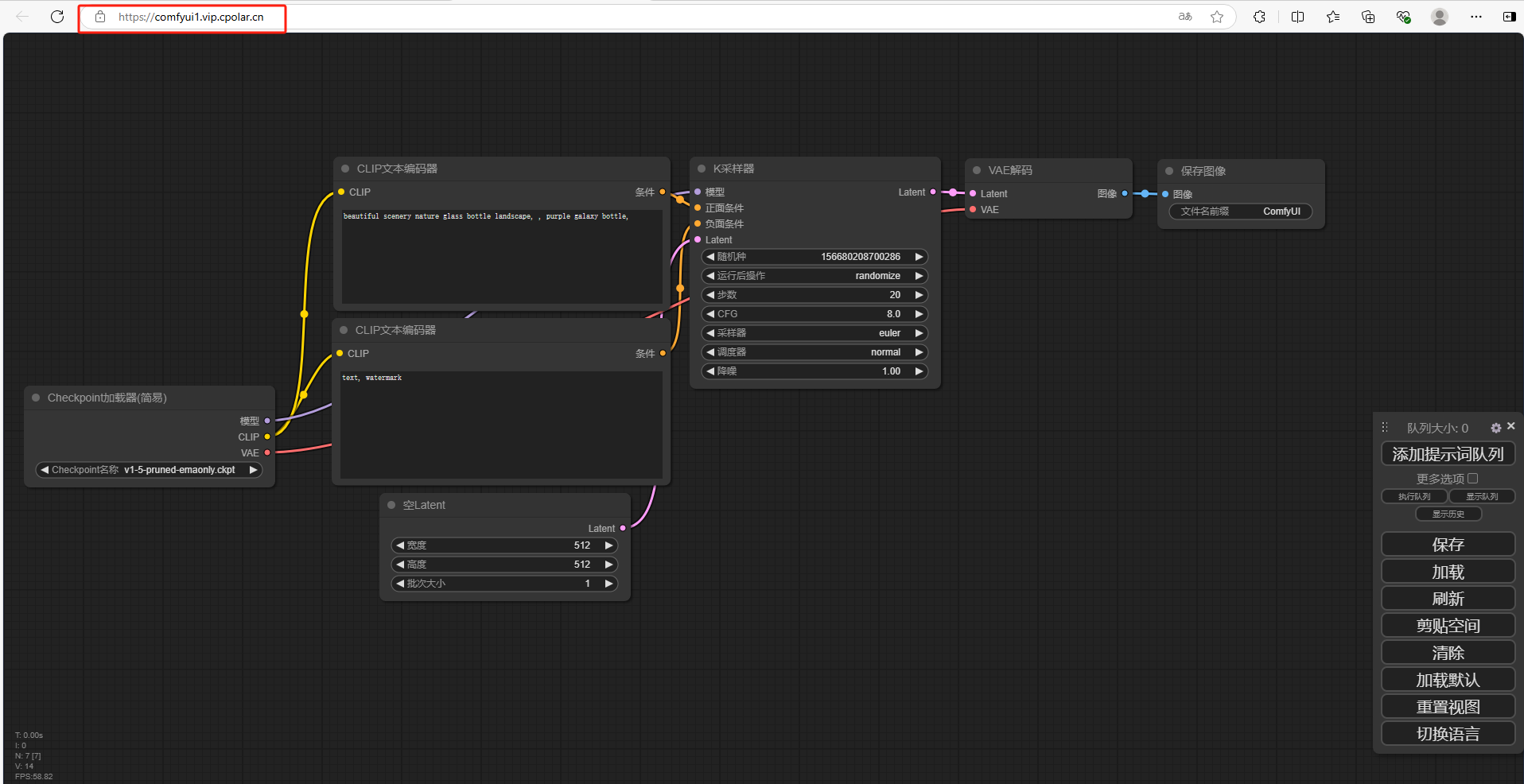
AI新玩法:Flux.1图像生成结合内网穿透远程生图的解决方案
文章目录 前言1. 本地部署ComfyUI2. 下载 Flux.1 模型3. 下载CLIP模型4. 下载 VAE 模型5. 演示文生图6. 公网使用 Flux.1 大模型6.1 创建远程连接公网地址 7. 固定远程访问公网地址 前言 在这个AI技术日新月异的时代,图像生成模型已经成为了创意工作者和开发者手中…...

Jenkins-pipeline Jenkinsfile说明
一. 简介: Jenkinsfile 是一个文本文件,通常保存在项目的源代码仓库中,用于定义 Jenkins Pipeline 的行为。使用 Jenkinsfile 可以使 CI/CD 流程版本化,并且易于共享和审核。 二. 关于jenkinsfile: jenkins的pipeline…...

vue3中为什么引入setup,引入setup是为了解决什么问题,setup的执行时机是什么?返回值是什么
在 Vue 3 中,引入 setup 函数是为了提供一种更加简洁、灵活、逻辑分离和可维护的方式来组织组件的逻辑。setup 使得 Vue 3 在构建应用时,能够更加有效地支持组合式 API(Composition API),解决了 Vue 2 中一些组件逻辑组…...

Ubuntu 安装 docker 配置环境及其常用命令
Docker 安装与配置指南 本文介绍如何在 Ubuntu 系统上安装 Docker,解决权限问题,配置 Docker Compose,代理端口转发,容器内部代理问题等并进行相关的优化设置。参考官方文档:Docker 官方安装指南 一、安装 Docker 1…...

自动化01
测试用例的万能公式:功能测试界面测试性能测试易用性测试安全性测试兼容性测试 自动化的主要目的就是用来进行回归测试 新产品--第一个版本 (具备丰富的功能),将产品的整体进行测试,人工创造一个自动化测试用例,在n个版本的时候…...

音频入门(二):音频数据增强
本文介绍了一些常见的音频数据增强方法,并给出了代码实现。 目录 一、简介 二、代码 1. 安装必要的库 2. 代码 3. 各函数的介绍 4. 使用方法 参考: 一、简介 音频数据增强是机器学习和深度学习领域中用于改善模型性能和泛化能力的技术。 使用数据…...

MySQL管理事务处理
目录 1、事务处理是什么 2、控制事务处理 (1)事务的开始和结束 (2)回滚事务 (3)使用COMMIT (4)使用保留点 (5)结合存储过程的完整事务例子 3、小结 …...

MySQL数值型函数详解
简介 本文主要讲解MySQL数值型函数,包括:ROUND、RAND、ABS、MOD、TRUNCATE、CEIL、CEILING、FLOOR、POW、POWER、SQRT、LOG、LOG2、LOG10、SIGN、PI。 本文所有示例中,双横杠左边为执行的SQL语句,右边为执行语句的返回值。 ROU…...

54.DataGrid数据框图 C#例子 WPF例子
首先是绑定一个属性,属性名称无所谓。到时候看属性设置的啥,可能要改。 <DataGrid ItemsSource"{Binding Index_instance}"/> 然后创建INotifyPropertyChanged的类,并把相关固定的代码粘贴上去。 然后把这个目录类建好&am…...

总结6..
背包问题的解决过程 在解决问题之前,为描述方便,首先定义一些变量:Vi表示第 i 个物品的价值,Wi表示第 i 个物品的体积,定义V(i,j):当前背包容量 j,前 i 个物品最佳组合对应的价值,同…...

复位信号的同步与释放(同步复位、异步复位、异步复位同步释放)
文章目录 背景前言一、复位信号的同步与释放1.1 同步复位1.1.1 综述1.1.2 优缺点 1.2 recovery time和removal time1.3 异步复位1.3.1 综述1.3.2 优缺点 1.4 同步复位 与 异步复位1.5 异步复位、同步释放1.5.1 总述1.5.2 机理1.5.3 复位网络 二、思考与补充2.1 复…...

Gartner发布2025年网络治理、风险与合规战略路线图
新型网络风险和合规义务,日益成为网络治理、风险与合规实践面临的问题。安全和风险管理领导者可以参考本文,实现从被动、专注于合规的方法到主动、进一步自动化方法的转型。 主要发现 不断变化的监管环境和不断扩大的攻击面,使企业机构难以实…...

DeepSeek系统设计辅助效能断崖式下降的3个信号,第2个90%工程师至今未察觉!
更多请点击: https://kaifayun.com 第一章:DeepSeek系统设计辅助效能断崖式下降的3个信号,第2个90%工程师至今未察觉! 当 DeepSeek 的系统设计辅助能力突然变“笨”——接口建议频繁失准、上下文感知错乱、生成代码无法通过基础编…...

51单片机驱动ST7735S彩屏避坑指南:从5秒刷屏到流畅贪吃蛇的优化实战
51单片机驱动ST7735S彩屏性能优化实战:从卡顿到流畅游戏的蜕变之路当一块128x160分辨率的ST7735S彩屏遇上传统的51单片机,这种组合看似矛盾却又充满挑战。许多开发者初次尝试时会发现,原本在STM32等平台上运行流畅的显示驱动,移植…...

适合地产人用的中介房源管理系统
在房产经纪行业,房源管理与客源管理是经纪人日常工作的核心,直接影响业务效率与成交转化。选择一套适配行业需求的中介房源管理系统,能帮助中介团队规范流程、降低运营成本、大幅提升业绩。今天我们以客观视角,详细解析全房源系统…...

解决Claude Code Token不足问题并享受Taotoken活动价
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code Token不足问题并享受Taotoken活动价 应用场景类,聚焦于使用Claude Code时遇到Token配额紧张的开发者&…...

千亿镁合金产业集群正在成形:成都、抚州、池州的新版图
一个新赛道的地理坐标 如果要在中国地图上标注一条正在成形的新兴产业集群走廊,高强镁合金这条线,值得被认真画出来。 成都龙泉驿——江西抚州临川——安徽池州高新区,三个坐标,三条生产线,一家公司,两年内…...

如何进行TVA仿真引擎的“光照地狱”训练?
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

LVGL多页面开发避坑:用内部Timer替代轮询,解决页面切换时的内存踩踏问题
LVGL多页面开发中的内存安全实践:用Timer机制替代轮询的工程解决方案 在嵌入式UI开发中,LVGL因其轻量级和跨平台特性成为热门选择。但当项目复杂度提升到多页面交互时,开发者往往会遇到一个棘手问题:如何在频繁切换页面的同时保证…...

真可用!美团数字人模型开源,MV、电商等统统拿下
美团开源的数字人视频生成框架 LongCat-Video-Avatar 刚刚更新到 1.5 版本。是真能用。这版更新把音频编码器换了,推理步数砍到8步,在770人、13240条主观评分的大规模评测里,雷达图面积全面领先。音频编码器换血,8步出图LongCat-V…...

因果推断与机器学习融合:量化分析社会运动中镇压与抗议的动态关系
1. 项目概述:当数据科学遇见社会运动如果你研究过社会运动,尤其是那些看似突然爆发、席卷全国的抗议浪潮,你可能会被一个核心问题困扰:国家机器的镇压,究竟是浇灭火焰的冷水,还是火上浇油的催化剂ÿ…...

【DeepSeek漏洞扫描辅助实战指南】:20年安全专家亲授3大避坑法则与5步提效流程
更多请点击: https://intelliparadigm.com 第一章:DeepSeek漏洞扫描辅助的核心价值与适用边界 DeepSeek漏洞扫描辅助并非通用型渗透测试引擎,而是一个聚焦于大语言模型(LLM)应用层安全的轻量级分析工具。其核心价值在…...