一、对iic类模块分析与使用
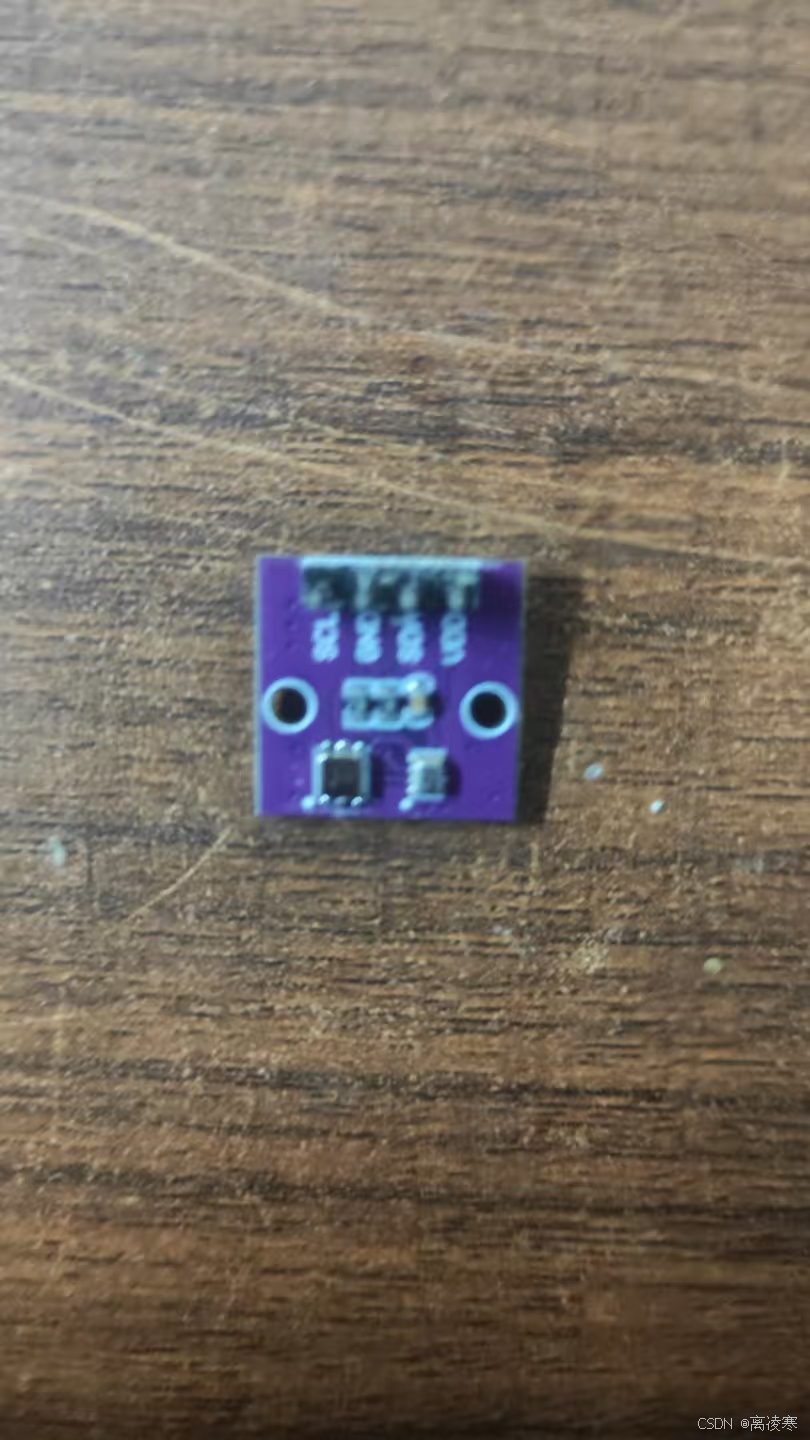
bmp280驱动代码
说明:
1、该模块用于获取气压,温度,海拔等数据。
vcc,gnd接电源
sda ,scl 接iic通信引脚
2、该模块使用iic通信,通过iic发送请求相关类的寄存器值,芯片获取对应寄存器返回的数据。
所以使用的时调用HAL_I2C_Mem_Write函数
3、调用:
uint8_t ret = BMP280_Init(); if(ret != 0x58){printf("BMP280传感器初始化错误\n");while(1);}float P,T,ALT;BMP280GetData(&P, &T, &ALT);printf("BMP280传感器测试数据:\n");printf("气压: %0.4f hPa\n",P);printf("温度: %0.2f ℃\n",T);printf("海拔: %0.2f m\n",ALT);printf("\n\n");
.h文件
#define bmp280 hi2c2#define INIT 0xBE //初始化
#define SoftReset 0xBA //软复位
#define StartTest 0xAC //开始测试#define BMP280_SLAVE_ADDRESS 0xec /* I2C从机地址 0xee或0xec *//*calibration parameters */
#define BMP280_DIG_T1_LSB_REG 0x88
#define BMP280_DIG_T1_MSB_REG 0x89
#define BMP280_DIG_T2_LSB_REG 0x8A
#define BMP280_DIG_T2_MSB_REG 0x8B
#define BMP280_DIG_T3_LSB_REG 0x8C
#define BMP280_DIG_T3_MSB_REG 0x8D
#define BMP280_DIG_P1_LSB_REG 0x8E
#define BMP280_DIG_P1_MSB_REG 0x8F
#define BMP280_DIG_P2_LSB_REG 0x90
#define BMP280_DIG_P2_MSB_REG 0x91
#define BMP280_DIG_P3_LSB_REG 0x92
#define BMP280_DIG_P3_MSB_REG 0x93
#define BMP280_DIG_P4_LSB_REG 0x94
#define BMP280_DIG_P4_MSB_REG 0x95
#define BMP280_DIG_P5_LSB_REG 0x96
#define BMP280_DIG_P5_MSB_REG 0x97
#define BMP280_DIG_P6_LSB_REG 0x98
#define BMP280_DIG_P6_MSB_REG 0x99
#define BMP280_DIG_P7_LSB_REG 0x9A
#define BMP280_DIG_P7_MSB_REG 0x9B
#define BMP280_DIG_P8_LSB_REG 0x9C
#define BMP280_DIG_P8_MSB_REG 0x9D
#define BMP280_DIG_P9_LSB_REG 0x9E
#define BMP280_DIG_P9_MSB_REG 0x9F#define BMP280_CHIPID_REG 0xD0 /*Chip ID Register */
#define BMP280_RESET_REG 0xE0 /*Softreset Register */
#define BMP280_STATUS_REG 0xF3 /*Status Register */
#define BMP280_CTRLMEAS_REG 0xF4 /*Ctrl Measure Register */
#define BMP280_CONFIG_REG 0xF5 /*Configuration Register */
#define BMP280_PRESSURE_MSB_REG 0xF7 /*Pressure MSB Register */
#define BMP280_PRESSURE_LSB_REG 0xF8 /*Pressure LSB Register */
#define BMP280_PRESSURE_XLSB_REG 0xF9 /*Pressure XLSB Register */
#define BMP280_TEMPERATURE_MSB_REG 0xFA /*Temperature MSB Reg */
#define BMP280_TEMPERATURE_LSB_REG 0xFB /*Temperature LSB Reg */
#define BMP280_TEMPERATURE_XLSB_REG 0xFC /*Temperature XLSB Reg */#define BMP280_SLEEP_MODE (0x00)
#define BMP280_FORCED_MODE (0x01)
#define BMP280_NORMAL_MODE (0x03)#define BMP280_TEMPERATURE_CALIB_DIG_T1_LSB_REG (0x88)
#define BMP280_PRESSURE_TEMPERATURE_CALIB_DATA_LENGTH (24)
#define BMP280_DATA_FRAME_SIZE (6)#define BMP280_OVERSAMP_SKIPPED (0x00)
#define BMP280_OVERSAMP_1X (0x01)
#define BMP280_OVERSAMP_2X (0x02)
#define BMP280_OVERSAMP_4X (0x03)
#define BMP280_OVERSAMP_8X (0x04)
#define BMP280_OVERSAMP_16X (0x05)typedef struct
{uint16_t dig_T1;/* calibration T1 data */int16_t dig_T2; /* calibration T2 data */int16_t dig_T3; /* calibration T3 data */uint16_t dig_P1;/* calibration P1 data */int16_t dig_P2; /* calibration P2 data */int16_t dig_P3; /* calibration P3 data */int16_t dig_P4; /* calibration P4 data */int16_t dig_P5; /* calibration P5 data */int16_t dig_P6; /* calibration P6 data */int16_t dig_P7; /* calibration P7 data */int16_t dig_P8; /* calibration P8 data */int16_t dig_P9; /* calibration P9 data */int32_t t_fine; /* calibration t_fine data */
} bmp280Calib;
uint8_t BMP280_Init(void);
void BMP280GetData(float* pressure, float* temperature, float* asl);
.c文件
#include "bmp280.h"static int32_t bmp280RawPressure = 0;
static int32_t bmp280RawTemperature = 0;#define BMP280_PRESSURE_OSR (BMP280_OVERSAMP_8X)
#define BMP280_TEMPERATURE_OSR (BMP280_OVERSAMP_16X)
#define BMP280_MODE (BMP280_PRESSURE_OSR << 2 | BMP280_TEMPERATURE_OSR << 5 | BMP280_NORMAL_MODE)bmp280Calib bmp280Cal;uint8_t BMP280_Init(void)
{uint8_t bmp280_id;uint8_t tmp[10];HAL_I2C_Mem_Read(&bmp280,BMP280_SLAVE_ADDRESS, BMP280_CHIPID_REG, 1, (uint8_t *)&bmp280_id,1,0xff);HAL_I2C_Mem_Read(&bmp280,BMP280_SLAVE_ADDRESS, BMP280_DIG_T1_LSB_REG, 1, (uint8_t *)&bmp280Cal,24,0xff);tmp[0] = BMP280_MODE;HAL_I2C_Mem_Write(&bmp280,BMP280_SLAVE_ADDRESS,BMP280_CTRLMEAS_REG, 1,tmp ,1,0xff);tmp[0] = (5<<2);HAL_I2C_Mem_Write(&bmp280,BMP280_SLAVE_ADDRESS,BMP280_CONFIG_REG, 1,tmp ,1,0xff); /*配置IIR滤波*/return bmp280_id;
}static void BMP280GetPressure2(void)
{uint8_t data[6];// read data from sensorHAL_I2C_Mem_Read(&bmp280,BMP280_SLAVE_ADDRESS, BMP280_PRESSURE_MSB_REG, 6, (uint8_t *)&data,6,0xff);bmp280RawPressure = (int32_t)((((uint32_t)(data[0])) << 12) | (((uint32_t)(data[1])) << 4) | ((uint32_t)data[2] >> 4));bmp280RawTemperature = (int32_t)((((uint32_t)(data[3])) << 12) | (((uint32_t)(data[4])) << 4) | ((uint32_t)data[5] >> 4));
}static int32_t BMP280CompensateT(int32_t adcT)
{int32_t var1, var2, T;var1 = ((((adcT >> 3) - ((int32_t)bmp280Cal.dig_T1 << 1))) * ((int32_t)bmp280Cal.dig_T2)) >> 11;var2 = (((((adcT >> 4) - ((int32_t)bmp280Cal.dig_T1)) * ((adcT >> 4) - ((int32_t)bmp280Cal.dig_T1))) >> 12) * ((int32_t)bmp280Cal.dig_T3)) >> 14;bmp280Cal.t_fine = var1 + var2;T = (bmp280Cal.t_fine * 5 + 128) >> 8;return T;
}// Returns pressure in Pa as unsigned 32 bit integer in Q24.8 format (24 integer bits and 8 fractional bits).
// Output value of "24674867" represents 24674867/256 = 96386.2 Pa = 963.862 hPa
static uint32_t BMP280CompensateP(int32_t adcP)
{int64_t var1, var2, p;var1 = ((int64_t)bmp280Cal.t_fine) - 128000;var2 = var1 * var1 * (int64_t)bmp280Cal.dig_P6;var2 = var2 + ((var1*(int64_t)bmp280Cal.dig_P5) << 17);var2 = var2 + (((int64_t)bmp280Cal.dig_P4) << 35);var1 = ((var1 * var1 * (int64_t)bmp280Cal.dig_P3) >> 8) + ((var1 * (int64_t)bmp280Cal.dig_P2) << 12);var1 = (((((int64_t)1) << 47) + var1)) * ((int64_t)bmp280Cal.dig_P1) >> 33;if (var1 == 0)return 0;p = 1048576 - adcP;p = (((p << 31) - var2) * 3125) / var1;var1 = (((int64_t)bmp280Cal.dig_P9) * (p >> 13) * (p >> 13)) >> 25;var2 = (((int64_t)bmp280Cal.dig_P8) * p) >> 19;p = ((p + var1 + var2) >> 8) + (((int64_t)bmp280Cal.dig_P7) << 4);return (uint32_t)p;
}#define CONST_PF 0.1902630958 //(1/5.25588f) Pressure factor
#define FIX_TEMP 25 // Fixed Temperature. ASL is a function of pressure and temperature, but as the temperature changes so much (blow a little towards the flie and watch it drop 5 degrees) it corrupts the ASL estimates.// TLDR: Adjusting for temp changes does more harm than good.
/*** Converts pressure to altitude above sea level (ASL) in meters*/
static float BMP280PressureToAltitude(float* pressure/*, float* groundPressure, float* groundTemp*/)
{if (*pressure > 0){return ((pow((1015.7f / *pressure), CONST_PF) - 1.0f) * (FIX_TEMP + 273.15f)) / 0.0065f;}else{return 0;}
}#define FILTER_NUM 5
#define FILTER_A 0.1f/*限幅平均滤波法*/
static void presssureFilter(float* in, float* out)
{static uint8_t i = 0;static float filter_buf[FILTER_NUM] = {0.0};double filter_sum = 0.0;uint8_t cnt = 0;float deta;if(filter_buf[i] == 0.0f){filter_buf[i] = *in;*out = *in;if(++i >= FILTER_NUM)i=0;}else{if(i)deta = *in-filter_buf[i - 1];elsedeta = *in-filter_buf[FILTER_NUM - 1];if(fabs(deta) < FILTER_A){filter_buf[i] = *in;if(++i >= FILTER_NUM)i = 0;}for(cnt = 0; cnt < FILTER_NUM; cnt++){filter_sum += filter_buf[cnt];}*out = filter_sum / FILTER_NUM;}
}void BMP280GetData(float* pressure, float* temperature, float* asl)
{static float t;static float p;BMP280GetPressure2();t = BMP280CompensateT(bmp280RawTemperature) / 100.0;p = BMP280CompensateP(bmp280RawPressure) / 25600.0;presssureFilter(&p, pressure);*temperature = (float)t;/*单位度*/*asl = BMP280PressureToAltitude(pressure); /*转换成海拔*/
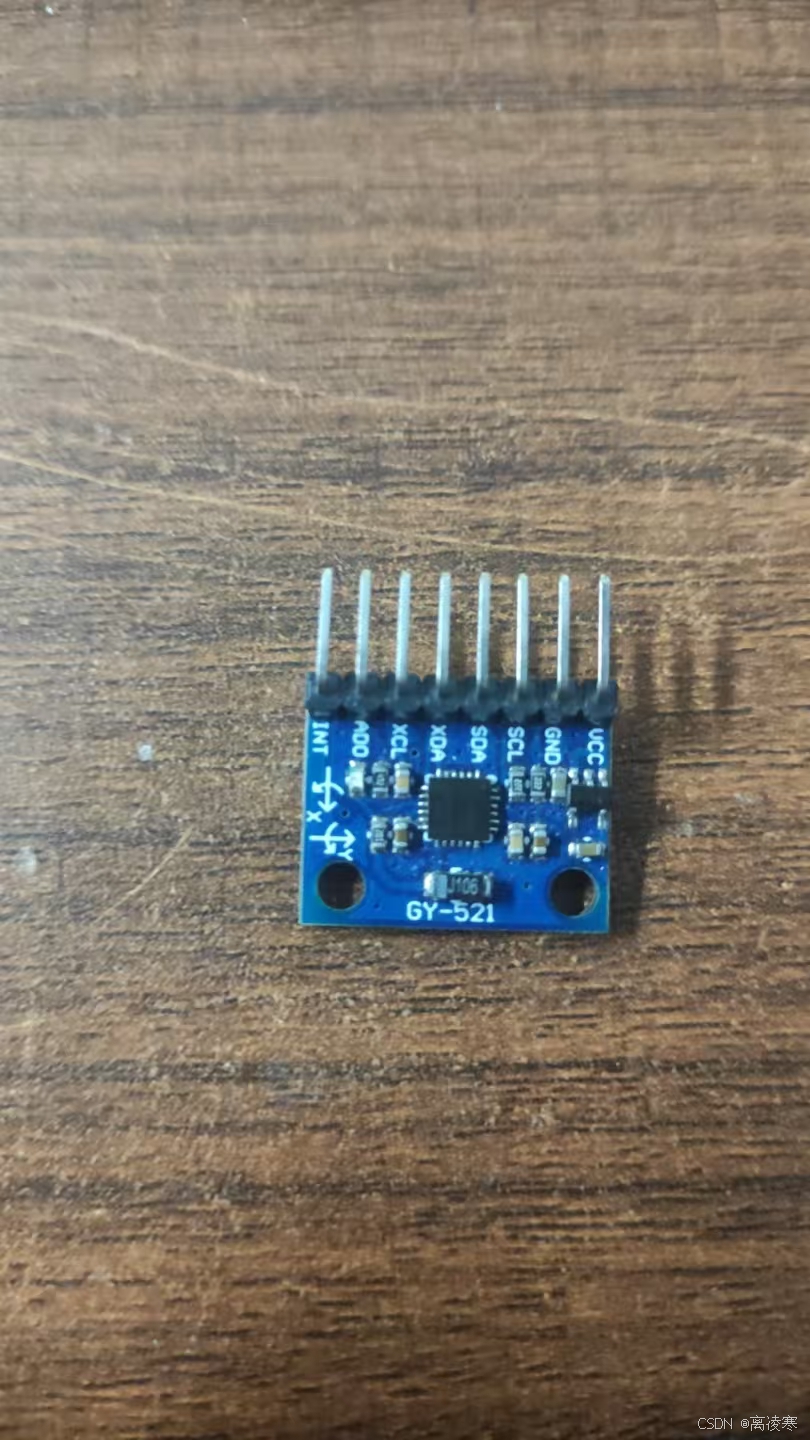
}mpu6050驱动代码
说明:
1、模块主要对外输出加速度,陀螺仪,温度等数据
vcc,gnd 接电源
scl,sda iic通信引脚
xda,xcl,iic主机通信引脚,(作为主机通信使用)
ad0,iic地址配置引脚
int,中断信号输出引脚
明确一点:scl,sda在通信时的目的是配置模块中的寄存器。
2、调用
MPU6050_Init();if (MPU6050ReadID() == 0){ printf("检测不到MPU6050,停机");while(1);}short Accel[3];short Gyro [3];short Temp;MPU6050ReadAcc(Accel); printf("加速度: %d__%d__%d ",Accel[0],Accel[1],Accel[2]);MPU6050ReadGyro(Gyro);printf("陀螺仪:%8d %8d %8d",Gyro[0],Gyro[1],Gyro[2]);MPU6050_ReturnTemp(&Temp);printf("温度:%d",Temp);.h文件
#define MPU6050_ADDRESS 0x68
#define MPU6050_WHO_AM_I 0x75
#define MPU6050_SMPLRT_DIV 0 //8000Hz
#define MPU6050_DLPF_CFG 0
#define MPU6050_GYRO_OUT 0x43 //MPU6050陀螺仪数据寄存器地址
#define MPU6050_ACC_OUT 0x3B //MPU6050加速度数据寄存器地址#define MPU6050_SLAVE_ADDRESS 0xd0 //MPU6050器件读地址#define MPU6050_ADDRESS_AD0_LOW 0x68 // address pin low (GND), default for InvenSense evaluation board
#define MPU6050_ADDRESS_AD0_HIGH 0x69 // address pin high (VCC)
#define MPU6050_DEFAULT_ADDRESS MPU6050_ADDRESS_AD0_LOW#define MPU6050_RA_XG_OFFS_TC 0x00 //[7] PWR_MODE, [6:1] XG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN
#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN
#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN
#define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS
#define MPU6050_RA_XA_OFFS_L_TC 0x07
#define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS
#define MPU6050_RA_YA_OFFS_L_TC 0x09
#define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS
#define MPU6050_RA_ZA_OFFS_L_TC 0x0B
#define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR
#define MPU6050_RA_XG_OFFS_USRL 0x14
#define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR
#define MPU6050_RA_YG_OFFS_USRL 0x16
#define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR
#define MPU6050_RA_ZG_OFFS_USRL 0x18
#define MPU6050_RA_SMPLRT_DIV 0x19
#define MPU6050_RA_CONFIG 0x1A
#define MPU6050_RA_GYRO_CONFIG 0x1B
#define MPU6050_RA_ACCEL_CONFIG 0x1C
#define MPU6050_RA_FF_THR 0x1D
#define MPU6050_RA_FF_DUR 0x1E
#define MPU6050_RA_MOT_THR 0x1F
#define MPU6050_RA_MOT_DUR 0x20
#define MPU6050_RA_ZRMOT_THR 0x21
#define MPU6050_RA_ZRMOT_DUR 0x22
#define MPU6050_RA_FIFO_EN 0x23
#define MPU6050_RA_I2C_MST_CTRL 0x24
#define MPU6050_RA_I2C_SLV0_ADDR 0x25
#define MPU6050_RA_I2C_SLV0_REG 0x26
#define MPU6050_RA_I2C_SLV0_CTRL 0x27
#define MPU6050_RA_I2C_SLV1_ADDR 0x28
#define MPU6050_RA_I2C_SLV1_REG 0x29
#define MPU6050_RA_I2C_SLV1_CTRL 0x2A
#define MPU6050_RA_I2C_SLV2_ADDR 0x2B
#define MPU6050_RA_I2C_SLV2_REG 0x2C
#define MPU6050_RA_I2C_SLV2_CTRL 0x2D
#define MPU6050_RA_I2C_SLV3_ADDR 0x2E
#define MPU6050_RA_I2C_SLV3_REG 0x2F
#define MPU6050_RA_I2C_SLV3_CTRL 0x30
#define MPU6050_RA_I2C_SLV4_ADDR 0x31
#define MPU6050_RA_I2C_SLV4_REG 0x32
#define MPU6050_RA_I2C_SLV4_DO 0x33
#define MPU6050_RA_I2C_SLV4_CTRL 0x34
#define MPU6050_RA_I2C_SLV4_DI 0x35
#define MPU6050_RA_I2C_MST_STATUS 0x36
#define MPU6050_RA_INT_PIN_CFG 0x37
#define MPU6050_RA_INT_ENABLE 0x38
#define MPU6050_RA_DMP_INT_STATUS 0x39
#define MPU6050_RA_INT_STATUS 0x3A
#define MPU6050_RA_ACCEL_XOUT_H 0x3B
#define MPU6050_RA_ACCEL_XOUT_L 0x3C
#define MPU6050_RA_ACCEL_YOUT_H 0x3D
#define MPU6050_RA_ACCEL_YOUT_L 0x3E
#define MPU6050_RA_ACCEL_ZOUT_H 0x3F
#define MPU6050_RA_ACCEL_ZOUT_L 0x40
#define MPU6050_RA_TEMP_OUT_H 0x41
#define MPU6050_RA_TEMP_OUT_L 0x42
#define MPU6050_RA_GYRO_XOUT_H 0x43
#define MPU6050_RA_GYRO_XOUT_L 0x44
#define MPU6050_RA_GYRO_YOUT_H 0x45
#define MPU6050_RA_GYRO_YOUT_L 0x46
#define MPU6050_RA_GYRO_ZOUT_H 0x47
#define MPU6050_RA_GYRO_ZOUT_L 0x48
#define MPU6050_RA_EXT_SENS_DATA_00 0x49
#define MPU6050_RA_EXT_SENS_DATA_01 0x4A
#define MPU6050_RA_EXT_SENS_DATA_02 0x4B
#define MPU6050_RA_EXT_SENS_DATA_03 0x4C
#define MPU6050_RA_EXT_SENS_DATA_04 0x4D
#define MPU6050_RA_EXT_SENS_DATA_05 0x4E
#define MPU6050_RA_EXT_SENS_DATA_06 0x4F
#define MPU6050_RA_EXT_SENS_DATA_07 0x50
#define MPU6050_RA_EXT_SENS_DATA_08 0x51
#define MPU6050_RA_EXT_SENS_DATA_09 0x52
#define MPU6050_RA_EXT_SENS_DATA_10 0x53
#define MPU6050_RA_EXT_SENS_DATA_11 0x54
#define MPU6050_RA_EXT_SENS_DATA_12 0x55
#define MPU6050_RA_EXT_SENS_DATA_13 0x56
#define MPU6050_RA_EXT_SENS_DATA_14 0x57
#define MPU6050_RA_EXT_SENS_DATA_15 0x58
#define MPU6050_RA_EXT_SENS_DATA_16 0x59
#define MPU6050_RA_EXT_SENS_DATA_17 0x5A
#define MPU6050_RA_EXT_SENS_DATA_18 0x5B
#define MPU6050_RA_EXT_SENS_DATA_19 0x5C
#define MPU6050_RA_EXT_SENS_DATA_20 0x5D
#define MPU6050_RA_EXT_SENS_DATA_21 0x5E
#define MPU6050_RA_EXT_SENS_DATA_22 0x5F
#define MPU6050_RA_EXT_SENS_DATA_23 0x60
#define MPU6050_RA_MOT_DETECT_STATUS 0x61
#define MPU6050_RA_I2C_SLV0_DO 0x63
#define MPU6050_RA_I2C_SLV1_DO 0x64
#define MPU6050_RA_I2C_SLV2_DO 0x65
#define MPU6050_RA_I2C_SLV3_DO 0x66
#define MPU6050_RA_I2C_MST_DELAY_CTRL 0x67
#define MPU6050_RA_SIGNAL_PATH_RESET 0x68
#define MPU6050_RA_MOT_DETECT_CTRL 0x69
#define MPU6050_RA_USER_CTRL 0x6A
#define MPU6050_RA_PWR_MGMT_1 0x6B
#define MPU6050_RA_PWR_MGMT_2 0x6C
#define MPU6050_RA_BANK_SEL 0x6D
#define MPU6050_RA_MEM_START_ADDR 0x6E
#define MPU6050_RA_MEM_R_W 0x6F
#define MPU6050_RA_DMP_CFG_1 0x70
#define MPU6050_RA_DMP_CFG_2 0x71
#define MPU6050_RA_FIFO_COUNTH 0x72
#define MPU6050_RA_FIFO_COUNTL 0x73
#define MPU6050_RA_FIFO_R_W 0x74
#define MPU6050_RA_WHO_AM_I 0x75#define MPU6050_TC_PWR_MODE_BIT 7
#define MPU6050_TC_OFFSET_BIT 6
#define MPU6050_TC_OFFSET_LENGTH 6
#define MPU6050_TC_OTP_BNK_VLD_BIT 0#define MPU6050_VDDIO_LEVEL_VLOGIC 0
#define MPU6050_VDDIO_LEVEL_VDD 1#define MPU6050_CFG_EXT_SYNC_SET_BIT 5
#define MPU6050_CFG_EXT_SYNC_SET_LENGTH 3
#define MPU6050_CFG_DLPF_CFG_BIT 2
#define MPU6050_CFG_DLPF_CFG_LENGTH 3#define MPU6050_EXT_SYNC_DISABLED 0x0
#define MPU6050_EXT_SYNC_TEMP_OUT_L 0x1
#define MPU6050_EXT_SYNC_GYRO_XOUT_L 0x2
#define MPU6050_EXT_SYNC_GYRO_YOUT_L 0x3
#define MPU6050_EXT_SYNC_GYRO_ZOUT_L 0x4
#define MPU6050_EXT_SYNC_ACCEL_XOUT_L 0x5
#define MPU6050_EXT_SYNC_ACCEL_YOUT_L 0x6
#define MPU6050_EXT_SYNC_ACCEL_ZOUT_L 0x7#define MPU6050_DLPF_BW_256 0x00
#define MPU6050_DLPF_BW_188 0x01
#define MPU6050_DLPF_BW_98 0x02
#define MPU6050_DLPF_BW_42 0x03
#define MPU6050_DLPF_BW_20 0x04
#define MPU6050_DLPF_BW_10 0x05
#define MPU6050_DLPF_BW_5 0x06#define MPU6050_GCONFIG_FS_SEL_BIT 4
#define MPU6050_GCONFIG_FS_SEL_LENGTH 2#define MPU6050_GYRO_FS_250 0x00
#define MPU6050_GYRO_FS_500 0x01
#define MPU6050_GYRO_FS_1000 0x02
#define MPU6050_GYRO_FS_2000 0x03#define MPU6050_ACONFIG_XA_ST_BIT 7
#define MPU6050_ACONFIG_YA_ST_BIT 6
#define MPU6050_ACONFIG_ZA_ST_BIT 5
#define MPU6050_ACONFIG_AFS_SEL_BIT 4
#define MPU6050_ACONFIG_AFS_SEL_LENGTH 2
#define MPU6050_ACONFIG_ACCEL_HPF_BIT 2
#define MPU6050_ACONFIG_ACCEL_HPF_LENGTH 3#define MPU6050_ACCEL_FS_2 0x00
#define MPU6050_ACCEL_FS_4 0x01
#define MPU6050_ACCEL_FS_8 0x02
#define MPU6050_ACCEL_FS_16 0x03#define MPU6050_DHPF_RESET 0x00
#define MPU6050_DHPF_5 0x01
#define MPU6050_DHPF_2P5 0x02
#define MPU6050_DHPF_1P25 0x03
#define MPU6050_DHPF_0P63 0x04
#define MPU6050_DHPF_HOLD 0x07#define MPU6050_TEMP_FIFO_EN_BIT 7
#define MPU6050_XG_FIFO_EN_BIT 6
#define MPU6050_YG_FIFO_EN_BIT 5
#define MPU6050_ZG_FIFO_EN_BIT 4
#define MPU6050_ACCEL_FIFO_EN_BIT 3
#define MPU6050_SLV2_FIFO_EN_BIT 2
#define MPU6050_SLV1_FIFO_EN_BIT 1
#define MPU6050_SLV0_FIFO_EN_BIT 0#define MPU6050_MULT_MST_EN_BIT 7
#define MPU6050_WAIT_FOR_ES_BIT 6
#define MPU6050_SLV_3_FIFO_EN_BIT 5
#define MPU6050_I2C_MST_P_NSR_BIT 4
#define MPU6050_I2C_MST_CLK_BIT 3
#define MPU6050_I2C_MST_CLK_LENGTH 4#define MPU6050_CLOCK_DIV_348 0x0
#define MPU6050_CLOCK_DIV_333 0x1
#define MPU6050_CLOCK_DIV_320 0x2
#define MPU6050_CLOCK_DIV_308 0x3
#define MPU6050_CLOCK_DIV_296 0x4
#define MPU6050_CLOCK_DIV_286 0x5
#define MPU6050_CLOCK_DIV_276 0x6
#define MPU6050_CLOCK_DIV_267 0x7
#define MPU6050_CLOCK_DIV_258 0x8
#define MPU6050_CLOCK_DIV_500 0x9
#define MPU6050_CLOCK_DIV_471 0xA
#define MPU6050_CLOCK_DIV_444 0xB
#define MPU6050_CLOCK_DIV_421 0xC
#define MPU6050_CLOCK_DIV_400 0xD
#define MPU6050_CLOCK_DIV_381 0xE
#define MPU6050_CLOCK_DIV_364 0xF#define MPU6050_I2C_SLV_RW_BIT 7
#define MPU6050_I2C_SLV_ADDR_BIT 6
#define MPU6050_I2C_SLV_ADDR_LENGTH 7
#define MPU6050_I2C_SLV_EN_BIT 7
#define MPU6050_I2C_SLV_BYTE_SW_BIT 6
#define MPU6050_I2C_SLV_REG_DIS_BIT 5
#define MPU6050_I2C_SLV_GRP_BIT 4
#define MPU6050_I2C_SLV_LEN_BIT 3
#define MPU6050_I2C_SLV_LEN_LENGTH 4#define MPU6050_I2C_SLV4_RW_BIT 7
#define MPU6050_I2C_SLV4_ADDR_BIT 6
#define MPU6050_I2C_SLV4_ADDR_LENGTH 7
#define MPU6050_I2C_SLV4_EN_BIT 7
#define MPU6050_I2C_SLV4_INT_EN_BIT 6
#define MPU6050_I2C_SLV4_REG_DIS_BIT 5
#define MPU6050_I2C_SLV4_MST_DLY_BIT 4
#define MPU6050_I2C_SLV4_MST_DLY_LENGTH 5#define MPU6050_MST_PASS_THROUGH_BIT 7
#define MPU6050_MST_I2C_SLV4_DONE_BIT 6
#define MPU6050_MST_I2C_LOST_ARB_BIT 5
#define MPU6050_MST_I2C_SLV4_NACK_BIT 4
#define MPU6050_MST_I2C_SLV3_NACK_BIT 3
#define MPU6050_MST_I2C_SLV2_NACK_BIT 2
#define MPU6050_MST_I2C_SLV1_NACK_BIT 1
#define MPU6050_MST_I2C_SLV0_NACK_BIT 0#define MPU6050_INTCFG_INT_LEVEL_BIT 7
#define MPU6050_INTCFG_INT_OPEN_BIT 6
#define MPU6050_INTCFG_LATCH_INT_EN_BIT 5
#define MPU6050_INTCFG_INT_RD_CLEAR_BIT 4
#define MPU6050_INTCFG_FSYNC_INT_LEVEL_BIT 3
#define MPU6050_INTCFG_FSYNC_INT_EN_BIT 2
#define MPU6050_INTCFG_I2C_BYPASS_EN_BIT 1
#define MPU6050_INTCFG_CLKOUT_EN_BIT 0#define MPU6050_INTMODE_ACTIVEHIGH 0x00
#define MPU6050_INTMODE_ACTIVELOW 0x01#define MPU6050_INTDRV_PUSHPULL 0x00
#define MPU6050_INTDRV_OPENDRAIN 0x01#define MPU6050_INTLATCH_50USPULSE 0x00
#define MPU6050_INTLATCH_WAITCLEAR 0x01#define MPU6050_INTCLEAR_STATUSREAD 0x00
#define MPU6050_INTCLEAR_ANYREAD 0x01#define MPU6050_INTERRUPT_FF_BIT 7
#define MPU6050_INTERRUPT_MOT_BIT 6
#define MPU6050_INTERRUPT_ZMOT_BIT 5
#define MPU6050_INTERRUPT_FIFO_OFLOW_BIT 4
#define MPU6050_INTERRUPT_I2C_MST_INT_BIT 3
#define MPU6050_INTERRUPT_PLL_RDY_INT_BIT 2
#define MPU6050_INTERRUPT_DMP_INT_BIT 1
#define MPU6050_INTERRUPT_DATA_RDY_BIT 0#define MPU6050_DMPINT_5_BIT 5
#define MPU6050_DMPINT_4_BIT 4
#define MPU6050_DMPINT_3_BIT 3
#define MPU6050_DMPINT_2_BIT 2
#define MPU6050_DMPINT_1_BIT 1
#define MPU6050_DMPINT_0_BIT 0#define MPU6050_MOTION_MOT_XNEG_BIT 7
#define MPU6050_MOTION_MOT_XPOS_BIT 6
#define MPU6050_MOTION_MOT_YNEG_BIT 5
#define MPU6050_MOTION_MOT_YPOS_BIT 4
#define MPU6050_MOTION_MOT_ZNEG_BIT 3
#define MPU6050_MOTION_MOT_ZPOS_BIT 2
#define MPU6050_MOTION_MOT_ZRMOT_BIT 0#define MPU6050_DELAYCTRL_DELAY_ES_SHADOW_BIT 7
#define MPU6050_DELAYCTRL_I2C_SLV4_DLY_EN_BIT 4
#define MPU6050_DELAYCTRL_I2C_SLV3_DLY_EN_BIT 3
#define MPU6050_DELAYCTRL_I2C_SLV2_DLY_EN_BIT 2
#define MPU6050_DELAYCTRL_I2C_SLV1_DLY_EN_BIT 1
#define MPU6050_DELAYCTRL_I2C_SLV0_DLY_EN_BIT 0#define MPU6050_PATHRESET_GYRO_RESET_BIT 2
#define MPU6050_PATHRESET_ACCEL_RESET_BIT 1
#define MPU6050_PATHRESET_TEMP_RESET_BIT 0#define MPU6050_DETECT_ACCEL_ON_DELAY_BIT 5
#define MPU6050_DETECT_ACCEL_ON_DELAY_LENGTH 2
#define MPU6050_DETECT_FF_COUNT_BIT 3
#define MPU6050_DETECT_FF_COUNT_LENGTH 2
#define MPU6050_DETECT_MOT_COUNT_BIT 1
#define MPU6050_DETECT_MOT_COUNT_LENGTH 2#define MPU6050_DETECT_DECREMENT_RESET 0x0
#define MPU6050_DETECT_DECREMENT_1 0x1
#define MPU6050_DETECT_DECREMENT_2 0x2
#define MPU6050_DETECT_DECREMENT_4 0x3#define MPU6050_USERCTRL_DMP_EN_BIT 7
#define MPU6050_USERCTRL_FIFO_EN_BIT 6
#define MPU6050_USERCTRL_I2C_MST_EN_BIT 5
#define MPU6050_USERCTRL_I2C_IF_DIS_BIT 4
#define MPU6050_USERCTRL_DMP_RESET_BIT 3
#define MPU6050_USERCTRL_FIFO_RESET_BIT 2
#define MPU6050_USERCTRL_I2C_MST_RESET_BIT 1
#define MPU6050_USERCTRL_SIG_COND_RESET_BIT 0#define MPU6050_PWR1_DEVICE_RESET_BIT 7
#define MPU6050_PWR1_SLEEP_BIT 6
#define MPU6050_PWR1_CYCLE_BIT 5
#define MPU6050_PWR1_TEMP_DIS_BIT 3
#define MPU6050_PWR1_CLKSEL_BIT 2
#define MPU6050_PWR1_CLKSEL_LENGTH 3#define MPU6050_CLOCK_INTERNAL 0x00
#define MPU6050_CLOCK_PLL_XGYRO 0x01
#define MPU6050_CLOCK_PLL_YGYRO 0x02
#define MPU6050_CLOCK_PLL_ZGYRO 0x03
#define MPU6050_CLOCK_PLL_EXT32K 0x04
#define MPU6050_CLOCK_PLL_EXT19M 0x05
#define MPU6050_CLOCK_KEEP_RESET 0x07#define MPU6050_PWR2_LP_WAKE_CTRL_BIT 7
#define MPU6050_PWR2_LP_WAKE_CTRL_LENGTH 2
#define MPU6050_PWR2_STBY_XA_BIT 5
#define MPU6050_PWR2_STBY_YA_BIT 4
#define MPU6050_PWR2_STBY_ZA_BIT 3
#define MPU6050_PWR2_STBY_XG_BIT 2
#define MPU6050_PWR2_STBY_YG_BIT 1
#define MPU6050_PWR2_STBY_ZG_BIT 0#define MPU6050_WAKE_FREQ_1P25 0x0
#define MPU6050_WAKE_FREQ_2P5 0x1
#define MPU6050_WAKE_FREQ_5 0x2
#define MPU6050_WAKE_FREQ_10 0x3#define MPU6050_BANKSEL_PRFTCH_EN_BIT 6
#define MPU6050_BANKSEL_CFG_USER_BANK_BIT 5
#define MPU6050_BANKSEL_MEM_SEL_BIT 4
#define MPU6050_BANKSEL_MEM_SEL_LENGTH 5#define MPU6050_WHO_AM_I_BIT 6
#define MPU6050_WHO_AM_I_LENGTH 6#define MPU6050_DMP_MEMORY_BANKS 8
#define MPU6050_DMP_MEMORY_BANK_SIZE 256
#define MPU6050_DMP_MEMORY_CHUNK_SIZE 16#define mpu_6050 hi2c4
void I2C_MPU6050_WriteData(uint16_t Addr, uint8_t Reg, uint8_t Value);
HAL_StatusTypeDef I2C_MPU6050_WriteBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length);
uint8_t I2C_MPU6050_ReadData(uint16_t Addr, uint8_t Reg);
HAL_StatusTypeDef I2C_MPU6050_ReadBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length);
HAL_StatusTypeDef I2C_MPU6050_IsDeviceReady(uint16_t DevAddress, uint32_t Trials);void WriteData(uint8_t Byte);
void WriteCommand(uint8_t Command);void MPU6050ReadTemp(short *tempData);
void MPU6050ReadGyro(short *gyroData);
void MPU6050ReadAcc(short *accData);
void MPU6050_ReturnTemp(short*Temperature);
void MPU6050_Init(void);
uint8_t MPU6050ReadID(void);
void PMU6050_ReadData(uint8_t reg_add,unsigned char*Read,uint8_t num);
void PMU6050_WriteReg(uint8_t reg_add,uint8_t reg_dat);void MPU6050_PWR_MGMT_1_INIT(void);
.c文件
//用于向设备发送指令。
void WriteCommand(uint8_t Command)
{uint8_t date=0;HAL_I2C_Mem_Write(&mpu_6050, 0x69,0x00, I2C_MEMADD_SIZE_8BIT,(uint8_t *)&Command, 1, 0xff);if(HAL_I2C_IsDeviceReady(&mpu_6050,0x69,100,0xffff)==HAL_OK){}}
//用于向从设备发送数据
void WriteData(uint8_t Byte)
{HAL_I2C_Master_Transmit(&mpu_6050, 0x69,(uint8_t *)&Byte, 1, 0xff);if(HAL_I2C_IsDeviceReady(&mpu_6050,0x69,100,0xffff)==HAL_OK){}}/*** 函数功能: I2C通信错误处理函数* 输入参数: 无* 返 回 值: 无* 说 明: 一般在I2C通信超时时调用该函数*/
static void I2C_MPU6050_Error (void)
{/* 反初始化I2C通信总线 */HAL_I2C_DeInit(&mpu_6050);/* 重新初始化I2C通信总线*/MX_I2C2_Init();printf("MPU6050 I2C通信超时!!! 重新启动I2C...\n");
}/*** 函数功能: 通过I2C写入一个值到指定寄存器内* 输入参数: Addr:I2C设备地址* Reg:目标寄存器* Value:值* 返 回 值: 无* 说 明: 无*/
void I2C_MPU6050_WriteData(uint16_t Addr, uint8_t Reg, uint8_t Value)
{HAL_StatusTypeDef status = HAL_OK;status = HAL_I2C_Mem_Write(&mpu_6050, Addr, (uint16_t)Reg, I2C_MEMADD_SIZE_8BIT, &Value, 1, 1000);/* 检测I2C通信状态 */if(status != HAL_OK){/* 调用I2C通信错误处理函数 */I2C_MPU6050_Error();}
}/*** 函数功能: 通过I2C写入一段数据到指定寄存器内* 输入参数: Addr:I2C设备地址* Reg:目标寄存器* RegSize:寄存器尺寸(8位或者16位)* pBuffer:缓冲区指针* Length:缓冲区长度* 返 回 值: HAL_StatusTypeDef:操作结果* 说 明: 在循环调用是需加一定延时时间*/
HAL_StatusTypeDef I2C_MPU6050_WriteBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length)
{HAL_StatusTypeDef status = HAL_OK;status = HAL_I2C_Mem_Write(&mpu_6050, Addr, (uint16_t)Reg, RegSize, pBuffer, Length, 1000); /* 检测I2C通信状态 */if(status != HAL_OK){/* 调用I2C通信错误处理函数 */I2C_MPU6050_Error();} return status;
}/*** 函数功能: 通过I2C读取一个指定寄存器内容* 输入参数: Addr:I2C设备地址* Reg:目标寄存器* 返 回 值: uint8_t:寄存器内容* 说 明: 无*/
uint8_t I2C_MPU6050_ReadData(uint16_t Addr, uint8_t Reg)
{HAL_StatusTypeDef status = HAL_OK;uint8_t value = 0;status = HAL_I2C_Mem_Read(&mpu_6050, Addr, Reg, I2C_MEMADD_SIZE_8BIT, &value, 1, 1000);/* 检测I2C通信状态 */if(status != HAL_OK){/* 调用I2C通信错误处理函数 */I2C_MPU6050_Error();}return value;
}/*** 函数功能: 通过I2C读取一段寄存器内容存放到指定的缓冲区内* 输入参数: Addr:I2C设备地址* Reg:目标寄存器* RegSize:寄存器尺寸(8位或者16位)* pBuffer:缓冲区指针* Length:缓冲区长度* 返 回 值: HAL_StatusTypeDef:操作结果* 说 明: 无*/
HAL_StatusTypeDef I2C_MPU6050_ReadBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length)
{HAL_StatusTypeDef status = HAL_OK;status = HAL_I2C_Mem_Read(&mpu_6050, Addr, (uint16_t)Reg, RegSize, pBuffer, Length, 1000);/* 检测I2C通信状态 */if(status != HAL_OK){/* 调用I2C通信错误处理函数 */I2C_MPU6050_Error();} return status;
}/*** 函数功能: 检测I2C设备是否处于准备好可以通信状态* 输入参数: DevAddress:I2C设备地址* Trials:尝试测试次数* 返 回 值: HAL_StatusTypeDef:操作结果* 说 明: 无*/
HAL_StatusTypeDef I2C_MPU6050_IsDeviceReady(uint16_t DevAddress, uint32_t Trials)
{ return (HAL_I2C_IsDeviceReady(&mpu_6050, DevAddress, Trials, 1000));
}/*** 函数功能: 写数据到MPU6050寄存器* 输入参数: 无* 返 回 值: 无* 说 明: 无*/
void MPU6050_WriteReg(uint8_t reg_add,uint8_t reg_dat)
{I2C_MPU6050_WriteData(MPU6050_SLAVE_ADDRESS,reg_add,reg_dat);
}/*** 函数功能: 从MPU6050寄存器读取数据* 输入参数: 无* 返 回 值: 无* 说 明: 无*/
void MPU6050_ReadData(uint8_t reg_add,unsigned char *Read,uint8_t num)
{I2C_MPU6050_ReadBuffer(MPU6050_SLAVE_ADDRESS,reg_add,I2C_MEMADD_SIZE_8BIT,Read,num);
}/*** 函数功能: 初始化MPU6050芯片* 输入参数: 无* 返 回 值: 无* 说 明: 无*/
void MPU6050_Init(void)
{int i=0,j=0;//在初始化之前要延时一段时间,若没有延时,则断电后再上电数据可能会出错for(i=0;i<1000;i++){for(j=0;j<1000;j++){;}}// HAL_Delay(50);MPU6050_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00); //解除休眠状态MPU6050_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07); //陀螺仪采样率,1KHzMPU6050_WriteReg(MPU6050_RA_CONFIG , 0x06); //低通滤波器的设置,截止频率是1K,带宽是5KMPU6050_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x00); //配置加速度传感器工作在2G模式,不自检MPU6050_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18); //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
}/*** 函数功能: 读取MPU6050的ID* 输入参数: 无* 返 回 值: 无* 说 明: 无*/
uint8_t MPU6050ReadID(void)
{unsigned char Re = 0;MPU6050_ReadData(MPU6050_RA_WHO_AM_I,&Re,1); //读器件地址if(Re != 0x68){printf("MPU6050 dectected error!\r\n检测不到MPU6050模块,请检查模块与开发板的接线");return 0;}else{printf("MPU6050 ID = %d\r\n",Re);return 1;}}/*** 函数功能: 读取MPU6050的加速度数据* 输入参数: 无* 返 回 值: 无* 说 明: 无*/
void MPU6050ReadAcc(short *accData)
{uint8_t buf[6];MPU6050_ReadData(MPU6050_ACC_OUT, buf, 6);accData[0] = (buf[0] << 8) | buf[1];accData[1] = (buf[2] << 8) | buf[3];accData[2] = (buf[4] << 8) | buf[5];
}/*** 函数功能: 读取MPU6050的角速度数据* 输入参数: 无* 返 回 值: 无* 说 明: 无*/
void MPU6050ReadGyro(short *gyroData)
{uint8_t buf[6];MPU6050_ReadData(MPU6050_GYRO_OUT,buf,6);gyroData[0] = (buf[0] << 8) | buf[1];gyroData[1] = (buf[2] << 8) | buf[3];gyroData[2] = (buf[4] << 8) | buf[5];
}/*** 函数功能: 读取MPU6050的原始温度数据* 输入参数: 无* 返 回 值: 无* 说 明: 无*/
void MPU6050ReadTemp(short *tempData)
{uint8_t buf[2];MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //读取温度值*tempData = (buf[0] << 8) | buf[1];
}/*** 函数功能: 读取MPU6050的温度数据,转化成摄氏度* 输入参数: 无* 返 回 值: 无* 说 明: 无*/
void MPU6050_ReturnTemp(short*Temperature)
{short temp3;uint8_t buf[2];MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //读取温度值temp3= (buf[0] << 8) | buf[1];*Temperature=(((double) (temp3 + 13200)) / 280)-13;
}
ATH20驱动文件
说明:
vcc,gnd供电相关
scl,sda iic通信相关引脚
该模块用于获取温湿度,使用iic通信,通过配置模块中芯片的寄存器来获取数据。
调用
ATH20_Init();float temperaut,humtidiy;ATH20_Read_CTdata(&temperaut,&humtidiy);printf("温度: %.3lf ℃\n",temperaut);printf("湿度: %.3lf %%\n",humtidiy);
.h文件
#define ATH20_SLAVE_ADDRESS 0x70 /* I2C从机地址 */#define INIT 0xBE //初始化
#define SoftReset 0xBA //软复位
#define StartTest 0xAC //开始测试uint8_t ATH20_Init(void);
void ATH20_Read_CTdata(float *temperature,float *Humidity);
.c文件
void ATH20_Read_CTdata(float *temperature,float *Humidity) //读取AHT10的温度和湿度数据
{uint32_t RetuData = 0;uint8_t Data[6]={0};static uint8_t tmp[3]={0xac,0x33,0x00};HAL_I2C_Master_Transmit(&hi2cx,ATH20_SLAVE_ADDRESS,tmp,3,0xffff);HAL_Delay(75);//等待75msHAL_I2C_Master_Receive(&hi2cx,ATH20_SLAVE_ADDRESS,Data,6,0xffff);if((Data[0]&0x80)==0x00){RetuData = 0;RetuData = ((uint32_t)Data[3]>>4)+((uint32_t)Data[2]<<4)+((uint32_t)Data[1]<<12);*Humidity = RetuData*100.0f/(1<<20);RetuData = (((uint32_t)Data[3]&0x0f)<<16)+((uint32_t)Data[4]<<8)+((uint32_t)Data[5]);*temperature = RetuData*200.0f/(1<<20)-50;}
}uint8_t ATH20_Init(void)
{static uint8_t tmp[3]={0xbe,0x08,0x00};uint8_t read_buf={0};HAL_Delay(40);HAL_I2C_Master_Receive(&hi2cx,ATH20_SLAVE_ADDRESS,&read_buf,1,0xffff);if((read_buf&0x80)==0x00){HAL_I2C_Master_Transmit(&hi2cx,ATH20_SLAVE_ADDRESS,tmp,3,0xffff);}
}uint8_t ATH20_Read_Status(void)//读取AHT10的状态寄存器
{uint8_t Byte_first;HAL_I2C_Mem_Read(&hi2cx,ATH20_SLAVE_ADDRESS,0x00,1,&Byte_first,1,0xff);return Byte_first;
}uint8_t ATH20_Read_Cal_Enable(void)
{uint8_t val = 0;//ret = 0,val = ATH20_Read_Status();if((val & 0x68) == 0x08) //判断NOR模式和校准输出是否有效return 1;elsereturn 0;
}void ATH20_Read_CTdata1(uint32_t *ct) //读取AHT10的温度和湿度数据
{uint32_t RetuData = 0;uint16_t cnt = 0;uint8_t Data[10];uint8_t tmp[10];tmp[0] = 0x33;tmp[1] = 0x00;HAL_I2C_Mem_Write(&hi2cx,ATH20_SLAVE_ADDRESS,StartTest,1,tmp,2,0xff);HAL_Delay(75);//等待75mscnt = 0;while(((ATH20_Read_Status()&0x80) == 0x80))//等待忙状态结束{HAL_Delay(1);if(cnt++ >= 100){break;}}HAL_I2C_Mem_Read(&hi2cx,ATH20_SLAVE_ADDRESS,0,1,Data,7,0xff);RetuData = 0;RetuData = (RetuData|Data[1]) << 8;RetuData = (RetuData|Data[2]) << 8;RetuData = (RetuData|Data[3]);RetuData = RetuData >> 4;ct[0] = RetuData;RetuData = 0;RetuData = (RetuData|Data[3]) << 8;RetuData = (RetuData|Data[4]) << 8;RetuData = (RetuData|Data[5]);RetuData = RetuData&0xfffff;ct[1] = RetuData;
}uint8_t count;
uint8_t ATH20_Init1(void)
{uint8_t tmp[10];HAL_Delay(40);tmp[0] = 0x08;tmp[1] = 0x00;HAL_I2C_Mem_Write(&hi2cx,ATH20_SLAVE_ADDRESS,INIT,1,tmp,2,0xff);HAL_Delay(500);count = 0;while(ATH20_Read_Cal_Enable() == 0)//需要等待状态字status的Bit[3]=1时才去读数据。如果Bit[3]不等于1 ,发软件复位0xBA给AHT10,再重新初始化AHT10,直至Bit[3]=1{HAL_I2C_Mem_Write(&hi2cx,ATH20_SLAVE_ADDRESS,SoftReset,1,tmp,2,0xff);HAL_Delay(200);HAL_I2C_Mem_Write(&hi2cx,ATH20_SLAVE_ADDRESS,INIT,1,tmp,2,0xff);count++;if(count >= 10)return 0;HAL_Delay(500);}return 1;
}
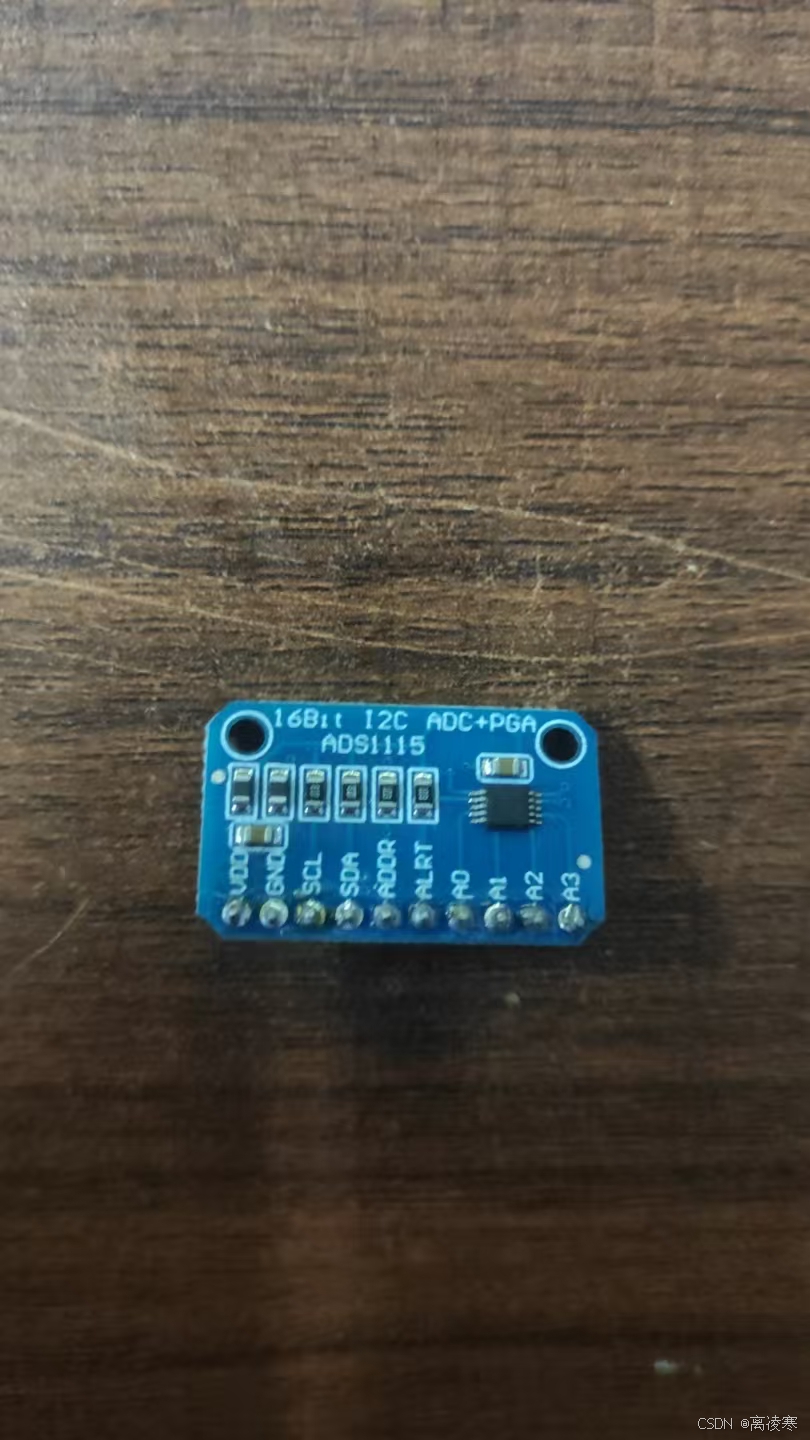
ads1115驱动文件
说明:
该模块是adc采集模块精度为16bit,使用iic进行数据通信
vcc,gnd供电
scl,sda iic通信
addr,配置模块iic地址
alrt,比较器输出/转换状态就绪引脚
a0~a3,adc采集通道
调用:
float A0_Voltage;char buffer[]="";//显示存储数组A0_Voltage=ADS1115_Read_average_ADC(0); //读取A0通道输入的电压,选择6.144V最大量程 sprintf(buffer,"%5.3f",A0_Voltage);//浮点型数据转为指定格式的字符串,5位,3位小数点printf("a0:%s\n",buffer);HAL_Delay(100);//等待100ms
.h文件
#define ADS1115_DEV_ADDR_GND 0x90//ADDR接GND,ADS1115地址
#define ADS1115_DEV_ADDR_VDD 0x92//ADDR接VDD,ADS1115地址
#define ADS1115_DEV_ADDR_SDA 0x94//ADDR接SDA,ADS1115地址
#define ADS1115_DEV_ADDR_SCL 0x96//ADDR接SCL,ADS1115地址#define ADS1115_DEV_ADDR 0x90//ADDR接GND决定ADS1115的7位地址,如果是写命令就是0x90,读命令就是0x91 #define ADS1115_Conversion 0x00 //转换寄存器地址
#define ADS1115_Config 0x01 //配置寄存器地址#define REG_L_thresh 0x02// Low threshold value
#define REG_H_thresh 0x03 // High threshold valueextern uint8_t BYTE_BUF[2];//读取转换寄存器的数组值
float ADS1115_Read_ADC(uint8_t channel);
float ADS1115_Read_average_ADC(uint8_t channel);.c文件
/*********************************************************************************
描述:配置01H寄存器,实现单次转换,读取00H寄存器,实现电压采样,并转换成电压值
输入:channel:需要采集的通道号,ADS1115是4通道,所以是0~3,分别代表A0~A3通道
返回:浮点数,对应通道采集到的电压值,单位V//配置寄存器说明//config register
/*CRH[15:8](R/W)BIT 15 14 13 12 11 10 9 8NAME OS MUX2 MUX1 MUX0 PGA2 PGA1 PGA0 MODE
CRL[7:0] (R/W)BIT 7 6 5 4 3 2 1 0NAME DR0 DR1 DR0 COM_MODE COM_POL COM_LAT COM_QUE1 COM_QUE0-----------------------------------------------------------------------------------* 15 | OS | 运行状态会单词转换开始* | | 写时:* | | 0 : 无效* | | 1 : 开始单次转换处于掉电状态时* | | 读时:* | | 0 : 正在转换* | | 1 : 未执行转换* -----------------------------------------------------------------------------------* 14:12 | MUX [2:0] | 输入复用多路配置* | | 000 : AINP = AIN0 and AINN = AIN1 (default)* | | 001 : AINP = AIN0 and AINN = AIN3* | | 010 : AINP = AIN1 and AINN = AIN3* | | 011 : AINP = AIN2 and AINN = AIN3* | | 100 : AINP = AIN0 and AINN = GND* | | 101 : AINP = AIN1 and AINN = GND* | | 110 : AINP = AIN2 and AINN = GND* | | 111 : AINP = AIN3 and AINN = GND* -----------------------------------------------------------------------------------* 11:9 | PGA [2:0] | 可编程增益放大器配置(FSR full scale range)* | | 000 : FSR = В±6.144 V* | | 001 : FSR = В±4.096 V* | | 010 : FSR = В±2.048 V (默认)* | | 011 : FSR = В±1.024 V* | | 100 : FSR = В±0.512 V* | | 101 : FSR = В±0.256 V* | | 110 : FSR = В±0.256 V* | | 111 : FSR = В±0.256 V* -----------------------------------------------------------------------------------* 8 | MODE | 工作模式* | | 0 : 连续转换* | | 1 : 单词转换* -----------------------------------------------------------------------------------* 7:5 | DR [2:0] | 采样频率* | | 000 : 8 SPS* | | 001 : 16 SPS* | | 010 : 32 SPS* | | 011 : 64 SPS* | | 100 : 128 SPS (默认)* | | 101 : 250 SPS* | | 110 : 475 SPS* | | 111 : 860 SPS* -----------------------------------------------------------------------------------* 4 | COMP_MODE | 比较器模式* | | 0 : 传统比较器 (default)* | | 1 : 窗口比较器* -----------------------------------------------------------------------------------* 3 | COMP_POL | Comparator polarity* | | 0 : 低电平有效 (default)* | | 1 : 高电平有效* -----------------------------------------------------------------------------------* 2 | COMP_LAT | Latching comparator* | | 0 : 非锁存比较器. (default)* | | 1 : 锁存比较器.* -----------------------------------------------------------------------------------* 1:0 | COMP_QUE [1:0] | Comparator queue and disable* | | 00 : Assert after one conversion* | | 01 : Assert after two conversions* | | 10 : Assert after four conversions* | | 11 : 禁用比较器并将ALERT/RDY设置为高阻抗 (default)* -----------------------------------------------------------------------------------**********************************************************************************/
float ADS1115_Read_ADC(uint8_t channel)//选择一个通道的单次转换
{uint8_t ConfigBuff[2];uint8_t PGA=0;//配置PGA[2:0]为000,采用FSR = ±6.144 Vint16_t tempData;float voltage;//实际电压值switch (channel){case 0:ConfigBuff[0] = (0xC0&0xf1)|(PGA<<1); //bit[15]=OS=1:开始单次转换0xC1[单次]//bit[14:12]=MUX[2:0]=100 : AINP = AIN0 and AINN = GND,采集A0通道//bit[11:9]=PGA[2:0]=000 : FSR = ±6.144 V//bit[8]=MODE=1:单次模式或掉电状态break;case 1:ConfigBuff[0] =(0xD1&0xf1)|(PGA<<1) ; //bit[15]=OS=1:开始单次转换0xD1[单次]//bit[14:12]=MUX[2:0]=101 : AINP = AIN1 and AINN = GND,采集A1通道//bit[11:9]=PGA[2:0]=000 : FSR = ±6.144 V//bit[8]=MODE=1:单次模式或掉电状态break;case 2:ConfigBuff[0] =(0xE1&0xf1)|(PGA<<1); //bit[15]=OS=1:开始单次转换0xE1[单次]//bit[14:12]=MUX[2:0]=110 : AINP = AIN2 and AINN = GND,采集A2通道//bit[11:9]=PGA[2:0]=000 : FSR = ±6.144 V//bit[8]=MODE=1:单次模式或掉电状态break;case 3:ConfigBuff[0] =(0xF1&0xf1)|(PGA<<1); //bit[15]=OS=1:开始单次转换0xF1[单次]//bit[14:12]=MUX[2:0]=111 : AINP = AIN3 and AINN = GND,采集A3通道//bit[11:9]=PGA[2:0]=000 : FSR = ±6.144 V//bit[8]=MODE=1:单次模式或掉电状态break; }ConfigBuff[1] = 0xE3; //bit[7:5]=DR[2:0]=111:860 SPS//bit[1:0]=COMP_QUE[1:0]=11:不使能比较器HAL_I2C_Mem_Write(&hi2c5,ADS1115_DEV_ADDR,ADS1115_Config,1,ConfigBuff,2,1000);//调用HAL库IIC写函数,按上面的参数,配置01H寄存器HAL_Delay(2);// 延时一定时间 HAL_I2C_Mem_Read(&hi2c5,ADS1115_DEV_ADDR,ADS1115_Conversion,1,BYTE_BUF,2,1000);//调用HAL库IIC读函数读取,00H寄存器的AD转换值,放入BYTE_BUFtempData = (int16_t)(BYTE_BUF[0] << 8) + (int16_t)BYTE_BUF[1];//FSR ±6.144 V,LSB 187.5 μV//FSR ±4.096 V,LSB 125 μV//FSR ±2.048 V,LSB 62.5 μV//FSR ±1.024 V,LSB 31.25 μV//FSR ±0.512 V,LSB 15.625 μV//FSR ±0.256 V,LSB 7.8125 μVswitch (PGA)//根据量程,采样值*LSB就是采集到的电压值{case 5:voltage = tempData * 0.0000078125;//单位Vbreak;case 4:voltage = tempData * 0.000015625;//单位Vbreak;case 3:voltage = tempData * 0.00003125;//单位Vbreak;case 2:voltage = tempData * 0.0000625;//单位Vbreak;case 1:voltage = tempData * 0.000125;//单位Vbreak;case 0:voltage = tempData * 0.0001875;//单位Vbreak;default:voltage = 0;break;}return voltage;}
/*********************************************************************************
描述:计算平均数
输入:channel:需要采集的通道号,ADS1115是4通道,所以是0~3,分别代表A0~A3通道
返回:浮点数,求平均后的电压,单位V
**********************************************************************************/
float ADS1115_Read_average_ADC(uint8_t channel)
{float sum[10],average;for(int i=0;i<10;i++){sum[i]=ADS1115_Read_ADC(channel);}average=(sum[3]+sum[4]+sum[5]+sum[6]+sum[7]+sum[8])/6;return average;
}
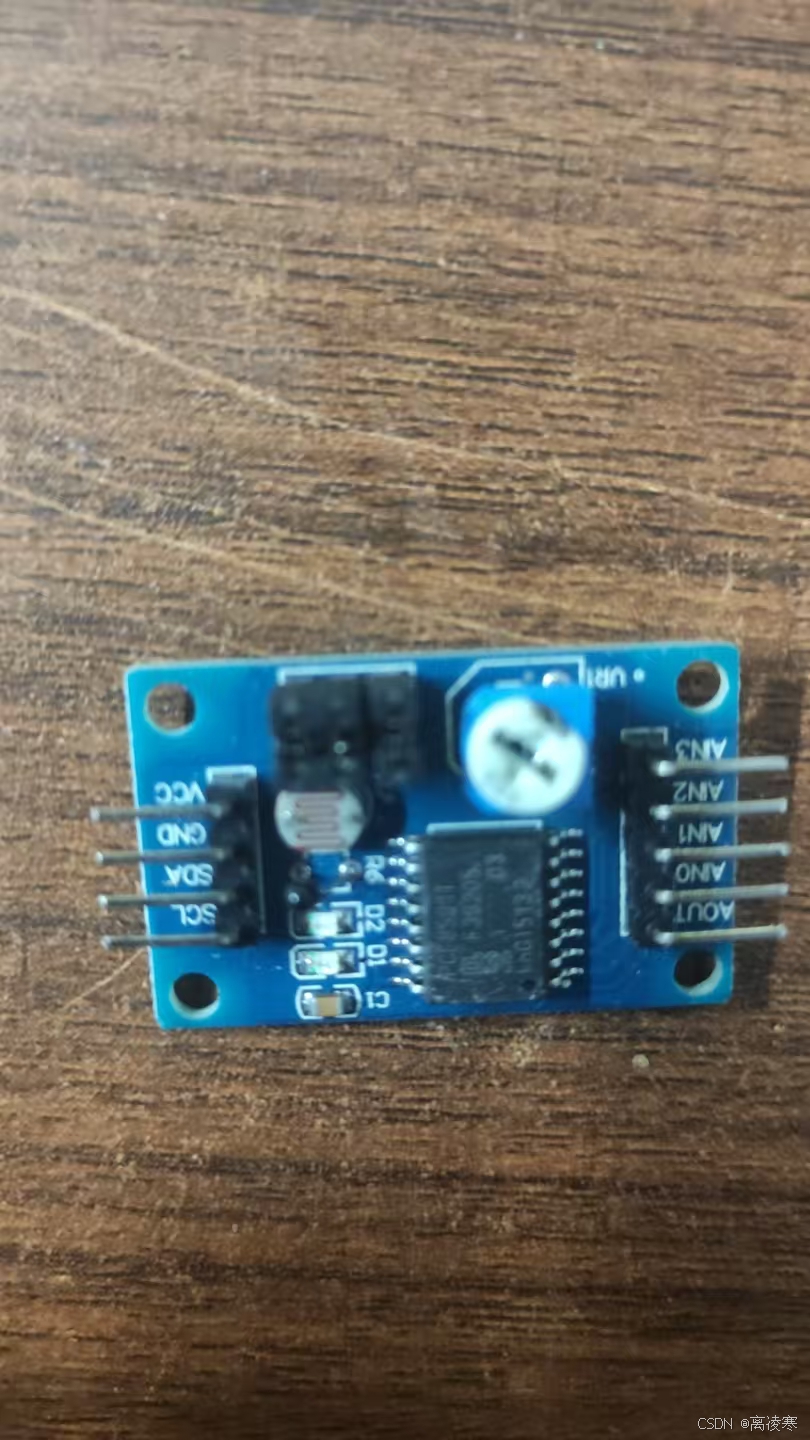
pcf8591驱动文件
说明:
该模块集成adc和dac转换功能,使用iic进行通信
vcc,gnd 供电
scl,sda iic通信
aout,输出dac电压
ain0~ain3,adc采集输入(跳线帽可接到对应adc采集通道)
调用:
uint8_t Lival[4]={0};IICWriteOneByte(PCF8591Add,MODE0|CHNL1); // Using channel 1HAL_Delay(350);Lival[0] = IICReadOneByte(PCF8591Add|0x01); //光敏信号The analog value of channel 0 is read and converted to a digital valueIICWriteOneByte(PCF8591Add,MODE0|CHNL2); // Using channel 2HAL_Delay(350);Lival[1] = IICReadOneByte(PCF8591Add|0x01); //热敏信号The analog value of channel 1 is read and converted to a digital valueIICWriteOneByte(PCF8591Add,MODE0|CHNL3); // Using channel 3HAL_Delay(350);Lival[2] = IICReadOneByte(PCF8591Add|0x01); //外部adc采集信号The analog value of channel 2 is read and converted to a digital valueIICWriteOneByte(PCF8591Add,MODE0|CHNL0); // Using channel 0HAL_Delay(350);Lival[3] = IICReadOneByte(PCF8591Add|0x01); //滑动变阻器信号&dac输出信号 The analog value of channel 3 is read and converted to a digital valueIICWriteTwoByte(PCF8591Add,DAouputEn,Lival[3]); //Converts the converted digital value to an analog valueHAL_Delay(100);printf("光敏信号channel0:%f \n 热敏信号channel1:%f \n 外部adc采集信号channel2:%d \n 滑动变阻器信号channel3:%f \n dac输出信号channel4:%f v\n",100.0-(float)Lival[0]*0.39,100.0-(float)Lival[1]*0.39,Lival[2],(float)Lival[3]*0.39,(float)Lival[3]*0.01294);.h文件
//控制寄存器的模式
#define MODE0 0x00 //Channel0 = AIN0; 全部开启//Channel1 = AIN1;//Channel2 = AIN2;//Channel3 = AIN3;
#define MODE1 0x10 //Channel0 = AIN3-AIN0;开启0 1 2通道//Channel1 = AIN3-AIN1//Channel2 = AIN3-AIN2;
#define MODE2 0x20 //Channel0 = AIN0;开启 0 1 3通道//Channel1 = AIN1;//Channel2 = AIN3-AIN2;//3 2通道合并
#define MODE3 0x30 //Channel0 = AIN1-AIN0;开启 0 1通道//Channel1 = AIN3-AIN2;合并1 0 ,3 2为两个通道#define CHNL0 0 //Using Channel0
#define CHNL1 1 //Using Channel1
#define CHNL2 2 //Using Channel2
#define CHNL3 3 //Using Channel3/*
当使用dac是控制寄存器需配置为0x40 才不影响其他通道
b{ 0‘111’(控制模式) 00‘11’(通道)}
*/
#define DAouputEn 0x40//0x50 or 0x60 or 0x70 is also ok!#define PCF8591Add 0x90 //为默认写时设备地址0x90,当进行读取时设备地址为0x91uint8_t IICReadOneByte(uint8_t DevAddress);
void IICWriteTwoByte(uint8_t DevAddress,uint8_t control,uint8_t D_value);
void IICWriteOneByte(uint8_t DevAddress,uint8_t control);.c文件
void IICWriteOneByte(uint8_t DevAddress,uint8_t control)
{HAL_I2C_Master_Transmit(&hi2c4,DevAddress, &control,1,1000);
}void IICWriteTwoByte(uint8_t DevAddress,uint8_t control,uint8_t D_value) //WriteTwoByte
{uint8_t data[2]={0};data[0] = control;data[1] = D_value;HAL_I2C_Master_Transmit(&hi2c4,DevAddress,data,2,100);
}
uint8_t IICReadOneByte(uint8_t DevAddress)
{uint8_t buf[1]={0}; HAL_I2C_Master_Receive(&hi2c4,DevAddress,buf,1,1000);return buf[0];
}
相关文章:
一、对iic类模块分析与使用
bmp280驱动代码 说明: 1、该模块用于获取气压,温度,海拔等数据。 vcc,gnd接电源 sda ,scl 接iic通信引脚 2、该模块使用iic通信,通过iic发送请求相关类的寄存器值,芯片获取对应寄存器返回的数据…...
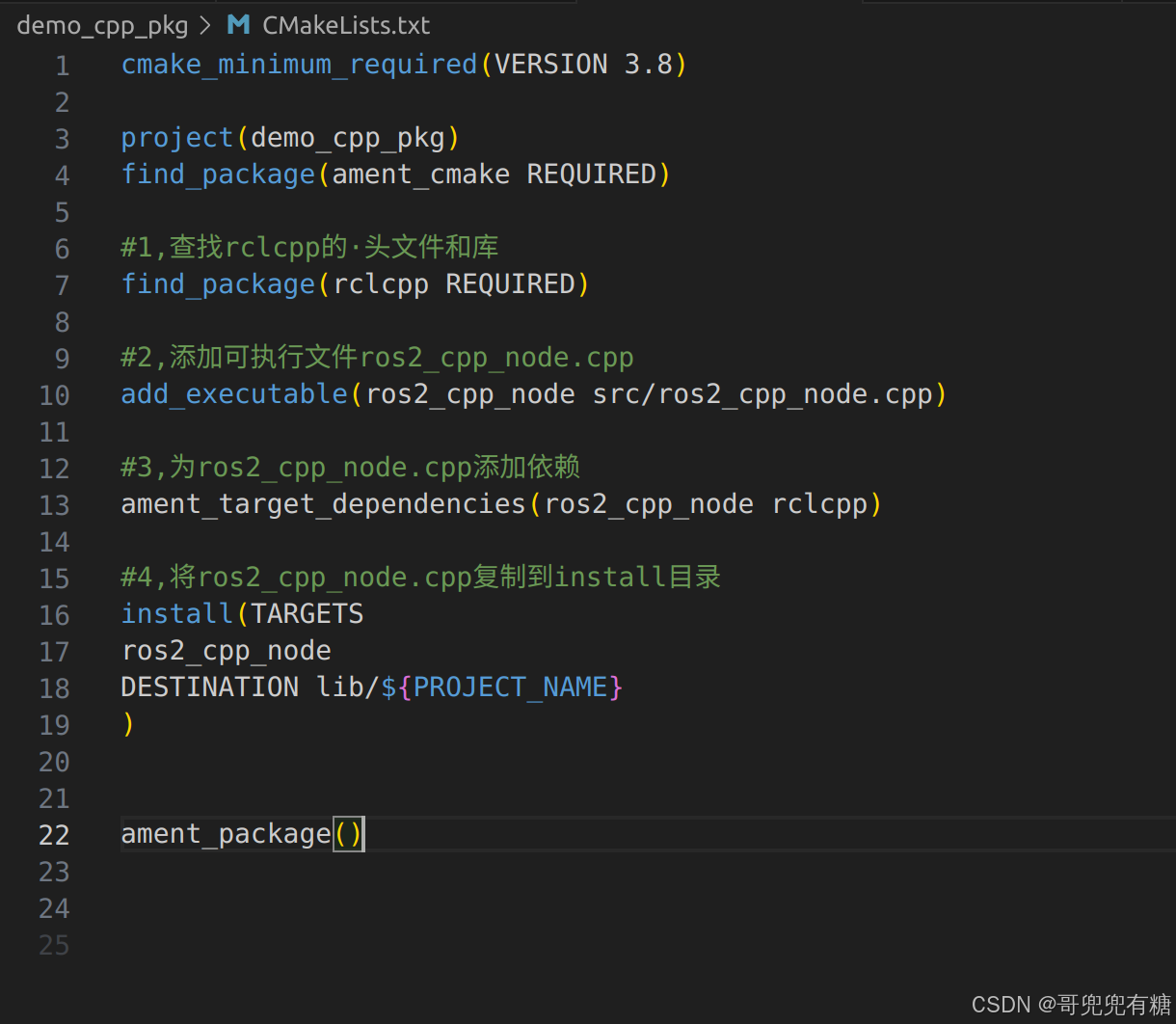
ROS 2机器人开发--CMakeLists.txt 文件详解
很多小白宝宝不懂CMakeLists.txt 究竟是干什么的,本文对CMakeLists.txt 文件进行详解 CMakeLists.txt 是 CMake 的核心文件,用户通过这个文件告诉 CMake 如何构建项目。这个文件通常包括设置项目名称、版本号、语言标准、编译器选项、查找依赖包、添加可…...

kan与小波,和不知所云的画图
文章目录 小波应用范围与pde小波的名字 画图图(a):数值解向量 \( u \)图(b):数值解向量 \( v \)结论图4 小波 在你提供的代码中,小波变换(Wavelet Transform)被用于 KANLinear 类中。具体来说,小波变换在 …...

使用DeepSeek实现自动化编程:类的自动生成
目录 简述 1. 通过注释生成C类 1.1 模糊生成 1.2 把控细节,让结果更精准 1.3 让DeepSeek自动生成代码 2. 验证DeepSeek自动生成的代码 2.1 安装SQLite命令行工具 2.2 验证DeepSeek代码 3. 测试代码下载 简述 在现代软件开发中,自动化编程工具如…...

算法题:快速排序
一、快速排序 1、快速排序总结 快速排序是一种高效的排序算法,基于分治法的思想。 分区操作是快速排序的核心,将数组分为两部分。 原地分区可以减少空间复杂度,提高效率。 快速排序的平均时间复杂度为 O(n log n),但在最坏情况…...

Python的那些事第三十六篇:基于 Vega 和 Vega-Lite 的数据可视化解决方案,Altair 声明式可视化库
Altair 声明式可视化库:基于 Vega 和 Vega-Lite 的数据可视化解决方案 摘要 在数据科学和分析领域,有效的数据可视化是理解数据、发现模式和传达见解的关键。Python 作为数据科学的主要编程语言之一,提供了多种数据可视化库。其中,Altair 是一个基于 Vega 和 Vega-Lite 的…...

aws(学习笔记第三十课) 练习使用transit gateway
aws(学习笔记第三十课) 使用transit gateway 学习内容: 什么是transit gateway构造两个vpc,并且使用session manager访问private subnet的ec2练习使用transit gateway 1. 什么是transit gateway Transit Gateway的概念 Transit Gateway就是VPC和OnPro…...

Phpstudy中的MySQL无法正常启动或启动后自动暂停,以及sqlilab环境搭建出现的问题解决方法
【解决方法】 无法启动的原因是Phpstudy中的MySQL与本地的mysql重名,导致无法正常启动;所以这时我们就需要将本地的MySQL进行修改名称; 或者修改phpstudy中数据库的端口号,但是我觉得还是不是很好解决这种问题 最后一个方法&#…...

【Android】安卓付款密码输入框、支付密码输入框
如图 代码部分: public class PayPasswordDialog extends AppCompatDialogFragment {private String mPayPass "";private String mTitle, mMoney;private final TextView[] mPayPassTextViewArray new TextView[6];private List<Integer> mPayP…...

Python异常处理:从入门到精通的实用指南
Langchain系列文章目录 01-玩转LangChain:从模型调用到Prompt模板与输出解析的完整指南 02-玩转 LangChain Memory 模块:四种记忆类型详解及应用场景全覆盖 03-全面掌握 LangChain:从核心链条构建到动态任务分配的实战指南 04-玩转 LangChai…...

【AVL树】—— 我与C++的不解之缘(二十三)
什么是AVL树? AVL树发明者是G. M. Adelson-Velsky和E. M. Landis两个前苏联科学家,他们在1962年论文《An algorithm for the organization of information》中发表了AVL树。AVL树是最先发明的自平衡二叉搜索树,说白了就是能够自己控制平衡结构…...

用大白话解释日志处理Log4j 是什么 有什么用 怎么用
Log4j是什么? Log4j就像程序的“黑匣子”,专门用来记录软件运行时的各种信息,比如哪里报错、性能如何、用户操作轨迹等。它是Java领域最常用的日志框架之一,可以灵活控制日志内容、输出位置(控制台、文件、数据库等&a…...

无人机遥控器的亮度 和 两个工作频率
工作频率 2.4000-2.4835 GHz , 5.725-5.850 GHz 1.这是一个无人机的遥控器的两个工作频率,为什么会有两个工作频率? 无人机的遥控器采用双频段设计(2.4GHz 和 5.8GHz),主要是为了解决以下问题并优化性…...

【Linux】命令行参数 | 环境变量(四)
目录 前言: 一、命令行参数: 1.main函数参数 2.为什么有它? 二、环境变量: 1.main函数第三个参数 2.查看shell本身环境变量 3.PATH环境变量 4.修改PATH环境变量配置文件 5.HOME环境变量 6.SHELL环境变量 7.PWD环境变…...

算法002——复写零
力扣——复写零点击即可跳转 这道题还是运用 双指针,我们从左往右开始,让 cur 0,dest 0,当我们循环时,会覆盖后面的值,所以从左到右无法实现,我们运用 从右到左的方式。 以示例一数组为例,从…...

例子 DQN + CartPole: 深入思考一下,强化学习确实是一场智能冒险之旅!
强化学习的概念 在技术人员眼里,深度学习、强化学习,或者是大模型,都只是一些算法。无论是简单,还是复杂,我们都是平静的看待。当商业元素日益渗透进技术领域,人人言必称大模型的时候。技术人该反思一下&a…...

java 实现xxl-job定时任务自动注册到调度中心
xxl-job 自动注册(执行器和任务) 前言 xxl-job是一个功能强大、简单易用、高可用且可扩展性强的分布式定时任务框架/分布式任务调度平台。它适用于各种需要定时任务调度的场景,并可根据业务需求进行灵活配置和扩展。 xxl-job简介 xxl-job是一个开源的分布式定时任务框架,…...
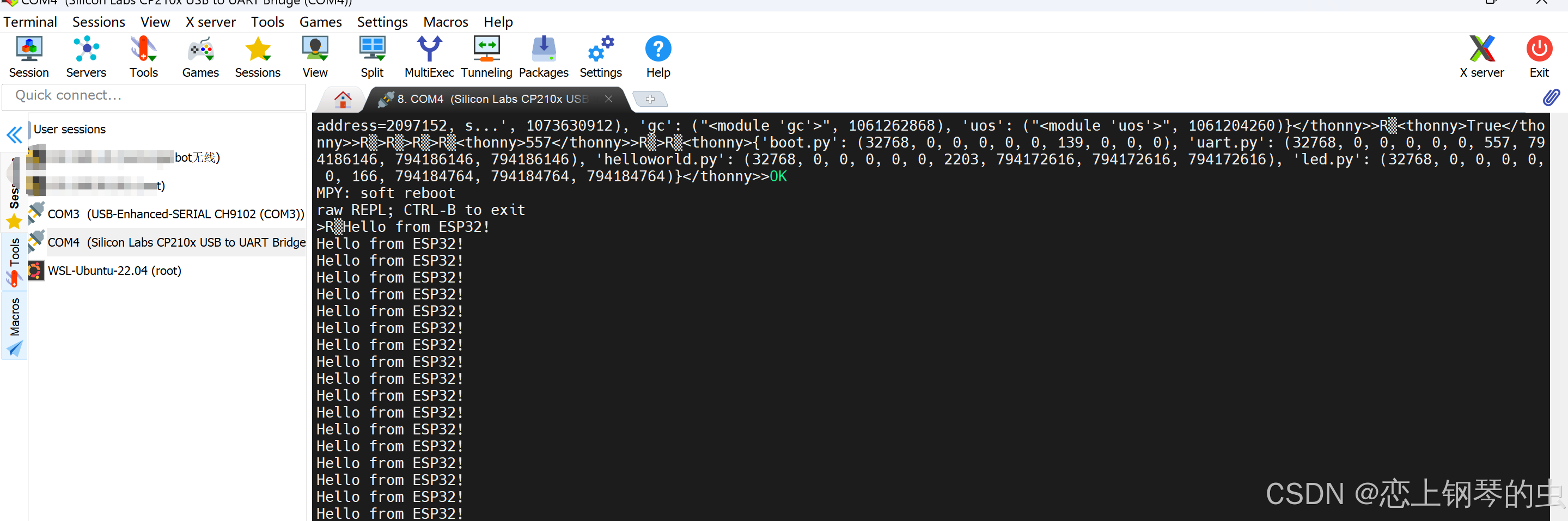
esp32串口通信
1、线路图 2、打开电脑的串口终端 3、eps32通过串口往电脑的串口终端输出信息: from machine import UART, Pin import time# 初始化UART0,波特率设置为115200 uart UART(0, baudrate115200, tx1, rx3)# 主循环 while True:# 要发送的消息#某些串口终…...

蓝桥杯备赛-前缀和-可获得的最小取值
问题描述 妮妮学姐手头有一个长度为 nn 的数组 aa,她想进行 kk 次操作来取出数组中的元素。每次操作必须选择以下两种操作之一: 取出数组中的最大元素。取出数组中的最小元素和次小元素。 妮妮学姐希望在进行完 kk 次操作后,取出的数的和最…...

UniApp 中封装 HTTP 请求与 Token 管理(附Demo)
目录 1. 基本知识2. Demo3. 拓展 1. 基本知识 从实战代码中学习,上述实战代码来源:芋道源码/yudao-mall-uniapp 该代码中,通过自定义 request 函数对 HTTP 请求进行了统一管理,并且结合了 Token 认证机制 请求封装原理ÿ…...

终极OneNote Markdown插件:3步让你的笔记焕然一新
终极OneNote Markdown插件:3步让你的笔记焕然一新 【免费下载链接】NoteWidget Markdown add-in for Microsoft Office OneNote 项目地址: https://gitcode.com/gh_mirrors/no/NoteWidget 还在为OneNote中繁琐的格式调整而烦恼吗?OneNote Markdow…...
:零代码基础,用自然语言完成 Web UI 测试)
Midscene.js 实战(一):零代码基础,用自然语言完成 Web UI 测试
一、开篇:UI 自动化测试,真的不需要会写代码吗? 如果你做过 UI 自动化测试,下面这些场景一定感同身受: 页面改版了,之前精心编写的 XPath 选择器全部失效,脚本大修; 新来的测试同事不懂 CSS 选择器,写不了自动化脚本,培训成本居高不下; 产品经理提了个自动化需求,…...

基于多保真度机器学习与飞秒激光的光子表面逆向设计实践
1. 项目概述与核心价值在光子学和先进制造领域,我们常常面临一个核心挑战:如何根据一个理想的光学性能目标,比如特定的光谱吸收或发射曲线,反向找到能够实现这一目标的精确物理结构或制造工艺参数。这就是逆向设计的魅力所在。传统…...

纤维丛与连接:从微分几何到量子控制与最优控制的桥梁
1. 纤维丛与连接:从抽象几何到物理与控制的桥梁在微分几何的世界里,纤维丛是一个强大而优雅的框架,它允许我们在一个复杂的“总空间”上,为底流形上的每一点都“安装”一个额外的结构,比如一个向量空间、一个李群&…...

JMeter梯度压测:精准定位系统可扩展性边界
1. 为什么“梯度式压测”不是加个线程组就完事了?很多人第一次打开JMeter,照着教程建个线程组、加个HTTP请求、跑个聚合报告,看到TPS从200涨到800就以为“压测完成了”。结果上线后流量一上来,服务直接503,监控里CPU没…...

DVWA靶场实战避坑指南:Docker环境搭建与四层安全等级解析
1. 这不是“又一个DVWA教程”,而是一份能让你在真实渗透测试中少走三周弯路的靶场操作手册很多人第一次接触渗透测试,打开浏览器输入http://192.168.1.10/dvwa,看到那个灰扑扑的登录页,就以为自己已经站在了红队门口。结果刚点开S…...

从Python课设到CTF利器:JWT_GUI工具开发复盘与使用避坑全指南
从Python课设到CTF利器:JWT_GUI工具开发复盘与使用避坑全指南在CTF竞赛和渗透测试中,JWT(JSON Web Token)的安全问题一直是个高频考点。作为一个原本只是应付Python课程设计的工具,JWT_GUI却意外成为了解决这类问题的利…...

Android加固反调试绕过:Frida动态劫持pthread_create实战
1. 这不是“破解”,而是理解Android加固对抗中的一次典型动态插桩实践你打开B站App,刚点开首页,进程就闪退了;或者在Frida脚本里下断点到pthread_create,App直接静默终止——这不是崩溃日志里常见的NullPointerExcepti…...

从准确率到社会福利:机器学习在社会资源分配中的范式演进
1. 从预测到分配:为什么准确率不再是社会场景下机器学习的唯一目标 在过去的十几年里,我亲眼见证了机器学习从一个学术概念,成长为驱动我们数字生活乃至部分现实决策的核心引擎。从最初在实验室里调参,看着模型在MNIST数据集上的准…...

Proxmox断电后启动失败深度复盘:不只是GRUB,LVM卷组损坏才是元凶
Proxmox断电后启动失败深度复盘:不只是GRUB,LVM卷组损坏才是元凶凌晨三点,服务器机房的备用电源耗尽警报响起。当电力恢复后,运维团队发现基于Proxmox VE 7.x的虚拟化平台无法启动——GRUB救援界面不断抛出unknown filesystem和di…...