直接法估计相机位姿
引入
在前面的文章:运动跟踪——Lucas-Kanade光流中,我们了解到特征点法存在一些缺陷,并且用光流法追踪像素点的运动来替代特征点法进行特征点匹配的过程来解决这些缺陷。而这篇文章要介绍的直接法则是通过计算特征点在下一时刻图像中的位置来进一步缩短算法计算时间。
直接法估计相机位姿的推导
直接法通过最小化相邻图像之间的光度误差来优化位姿参数。以下是推导过程:
1. 问题建模
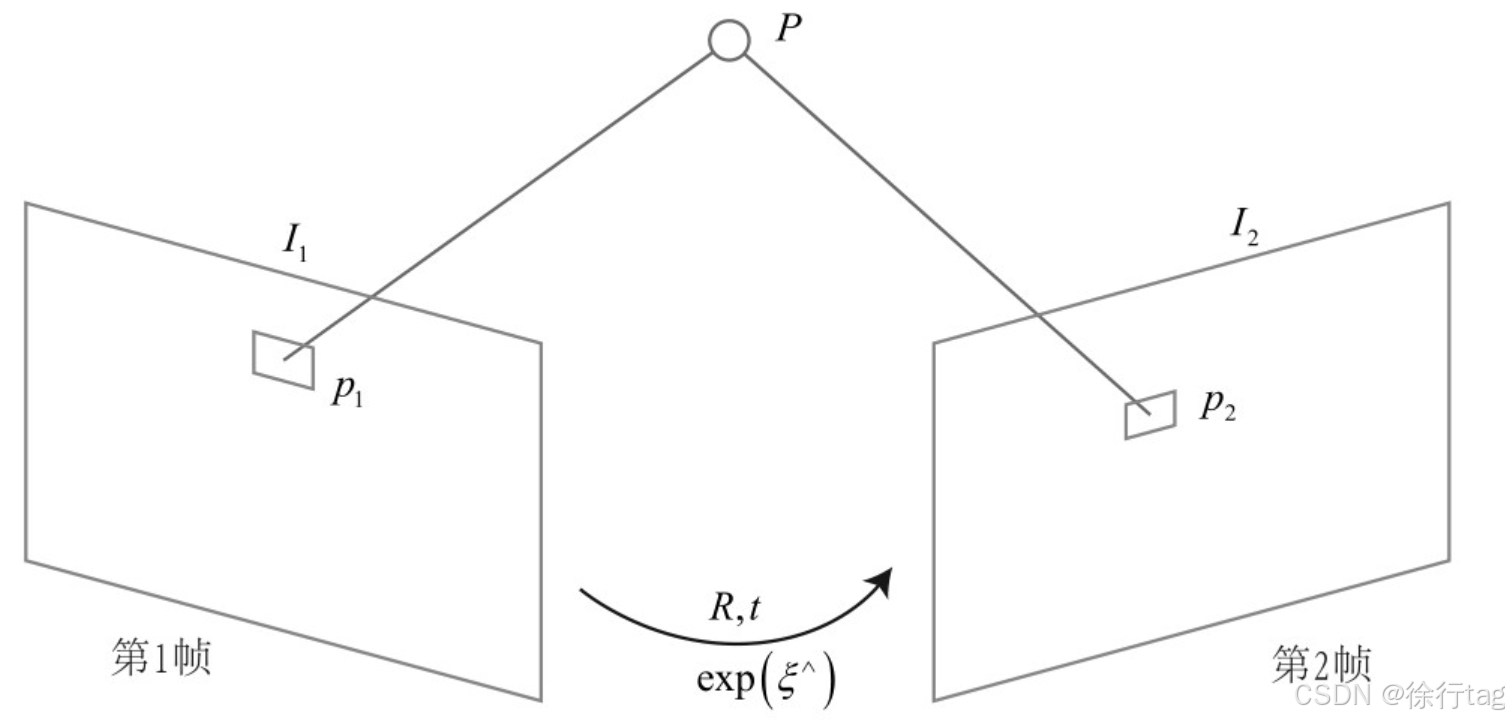
设参考帧图像为 I ref I_{\text{ref}} Iref,当前帧图像为 I cur I_{\text{cur}} Icur,相机的位姿变换为 T ∈ SE ( 3 ) T \in \text{SE}(3) T∈SE(3),用李代数 ξ ∈ s e ( 3 ) \xi \in \mathfrak{se}(3) ξ∈se(3)参数化。对于参考帧中的每个像素点 p i \mathbf{p}_i pi,其对应的3D点坐标为 P i \mathbf{P}_i Pi,投影到当前帧中的坐标为:
p i ′ = π ( T ⋅ P i ) \mathbf{p}_i' = \pi\left(T \cdot \mathbf{P}_i\right) pi′=π(T⋅Pi)
其中 π \pi π为投影函数, T = exp ( ξ ∧ ) T = \exp(\xi^\wedge) T=exp(ξ∧)。
光度误差定义为:
e i = I cur ( p i ′ ) − I ref ( p i ) e_i = I_{\text{cur}}(\mathbf{p}_i') - I_{\text{ref}}(\mathbf{p}_i) ei=Icur(pi′)−Iref(pi)
则优化目标是最小化总误差:
min ξ ∑ i ∥ e i ∥ 2 \min_\xi \sum_i \| e_i \|^2 ξmini∑∥ei∥2
2. 误差函数的导数
误差关于位姿的雅可比矩阵用链式求导为:
∂ e i ∂ ξ = ∂ I cur ∂ p i ′ ⋅ ∂ p i ′ ∂ ξ \frac{\partial e_i}{\partial \xi} = \frac{\partial I_{\text{cur}}}{\partial \mathbf{p}_i'} \cdot \frac{\partial \mathbf{p}_i'}{\partial \xi} ∂ξ∂ei=∂pi′∂Icur⋅∂ξ∂pi′
(1) 图像梯度项
∂ I cur ∂ p i ′ = [ I x , I y ] \frac{\partial I_{\text{cur}}}{\partial \mathbf{p}_i'} = \left[ I_x, I_y \right] ∂pi′∂Icur=[Ix,Iy]
其中 I x , I y I_x, I_y Ix,Iy 为当前帧在 p i ′ \mathbf{p}_i' pi′处的图像梯度。
(2) 投影点对位姿的导数
投影函数 p i ′ = π ( exp ( ξ ∧ ) P i ) \mathbf{p}_i' = \pi(\exp(\xi^\wedge) \mathbf{P}_i) pi′=π(exp(ξ∧)Pi)的导数为:
∂ p i ′ ∂ ξ = ∂ π ∂ P ′ ⋅ ∂ P ′ ∂ ξ \frac{\partial \mathbf{p}_i'}{\partial \xi} = \frac{\partial \pi}{\partial \mathbf{P}'} \cdot \frac{\partial \mathbf{P}'}{\partial \xi} ∂ξ∂pi′=∂P′∂π⋅∂ξ∂P′
其中:
- P ′ = T ⋅ P i \mathbf{P}' = T \cdot \mathbf{P}_i P′=T⋅Pi为变换后的3D点。
- ∂ π ∂ P ′ \frac{\partial \pi}{\partial \mathbf{P}'} ∂P′∂π为投影函数对3D点的导数:
∂ π ∂ P ′ = [ f x Z ′ 0 − f x X ′ Z ′ 2 0 f y Z ′ − f y Y ′ Z ′ 2 ] \frac{\partial \pi}{\partial \mathbf{P}'} = \begin{bmatrix} \frac{f_x}{Z'} & 0 & -\frac{f_x X'}{Z'^2} \\ 0 & \frac{f_y}{Z'} & -\frac{f_y Y'}{Z'^2} \end{bmatrix} ∂P′∂π=[Z′fx00Z′fy−Z′2fxX′−Z′2fyY′] - ∂ P ′ ∂ ξ \frac{\partial \mathbf{P}'}{\partial \xi} ∂ξ∂P′为李代数扰动模型:
∂ P ′ ∂ ξ = [ I 3 × 3 − P ′ ∧ ] \frac{\partial \mathbf{P}'}{\partial \xi} = \begin{bmatrix} \mathbf{I}_{3\times3} & -\mathbf{P}'^{\wedge} \end{bmatrix} ∂ξ∂P′=[I3×3−P′∧]
其中 P ′ ∧ \mathbf{P}'^{\wedge} P′∧为3D点的反对称矩阵。
3. 雅可比矩阵推导
结合上述结果,雅可比矩阵为:
J i = [ f x Z ′ 0 − f x X ′ Z ′ 2 f x X ′ Y ′ Z ′ 2 − f x ( 1 + X ′ 2 Z ′ 2 ) f x Y ′ Z ′ 0 f y Z ′ − f y Y ′ Z ′ 2 − f y ( 1 + Y ′ 2 Z ′ 2 ) f y X ′ Y ′ Z ′ 2 − f y X ′ Z ′ ] \mathbf{J}_i = \begin{bmatrix} \frac{f_x}{Z'} & 0 & -\frac{f_x X'}{Z'^2} & \frac{f_x X' Y'}{Z'^2} & -f_x\left(1 + \frac{X'^2}{Z'^2}\right) & \frac{f_x Y'}{Z'} \\ 0 & \frac{f_y}{Z'} & -\frac{f_y Y'}{Z'^2} & -f_y\left(1 + \frac{Y'^2}{Z'^2}\right) & \frac{f_y X' Y'}{Z'^2} & -\frac{f_y X'}{Z'} \end{bmatrix} Ji= Z′fx00Z′fy−Z′2fxX′−Z′2fyY′Z′2fxX′Y′−fy(1+Z′2Y′2)−fx(1+Z′2X′2)Z′2fyX′Y′Z′fxY′−Z′fyX′
4. 优化求解
使用高斯-牛顿法迭代更新位姿:
- 计算残差:对每个点计算 e i = I cur ( p i ′ ) − I ref ( p i ) e_i = I_{\text{cur}}(\mathbf{p}_i') - I_{\text{ref}}(\mathbf{p}_i) ei=Icur(pi′)−Iref(pi)。
- 构建雅可比矩阵:按上述公式计算每个点的 J i \mathbf{J}_i Ji。
- 求解增量方程:
H = ∑ i J i T J i , b = − ∑ i J i T e i \mathbf{H} = \sum_i \mathbf{J}_i^T \mathbf{J}_i, \quad \mathbf{b} = -\sum_i \mathbf{J}_i^T e_i H=i∑JiTJi,b=−i∑JiTei
Δ ξ = H − 1 b \Delta \xi = \mathbf{H}^{-1} \mathbf{b} Δξ=H−1b - 更新位姿:
ξ ← ξ + Δ ξ \xi \leftarrow \xi + \Delta \xi ξ←ξ+Δξ
5. 关键点总结
- 光度误差:基于灰度不变假设,直接比较像素亮度。
- 李代数扰动模型:用于计算位姿变化对投影点的影响。
- 雅可比矩阵:结合图像梯度和几何变换导数,指导优化方向。
- 多尺度优化:还可以采用图像金字塔提高鲁棒性和收敛性。
通过迭代优化,直接法能够有效估计相机的位姿变化,适用于特征缺失的场景,但对光照变化和初始值敏感。
至此,关于视觉里程计即根据图像信息求解相机位姿变换的知识已经讲解完毕。接下来将进入后端优化的学习。
相关文章:
直接法估计相机位姿
引入 在前面的文章:运动跟踪——Lucas-Kanade光流中,我们了解到特征点法存在一些缺陷,并且用光流法追踪像素点的运动来替代特征点法进行特征点匹配的过程来解决这些缺陷。而这篇文章要介绍的直接法则是通过计算特征点在下一时刻图像中的位置…...

PHP动态网站建设
如何配置虚拟主机 1. 学习提纲 本地发布与互联网发布:介绍了如何通过本地IP地址和互联网域名发布网站。 虚拟主机配置与访问:讲解了如何配置虚拟主机,并通过自定义域名访问不同的站点目录。 Web服务器配置:详细说明了如何配置A…...

【gRPC】Java高性能远程调用之gRPC详解
gRPC详解 一、什么是gRPC?二、用proto生成代码2.1、前期准备2.2、protobuf插件安装 三、简单 RPC3.1、开发gRPC服务端3.2、开发gRPC客户端3.3、验证gRPC服务 四、服务器端流式 RPC4.1、开发一个gRPC服务,类型是服务端流4.2、开发一个客户端,调…...
数据结构知识学习小结
一、动态内存分配基本步骤 1、内存分配简单示例: 个人对于示例的理解: 定义一个整型的指针变量p(着重认为它是一个“变量”我觉得可能会更好理解),这个变量用来存地址的,而不是“值”,malloc函…...

分布式锁—2.Redisson的可重入锁一
大纲 1.Redisson可重入锁RedissonLock概述 2.可重入锁源码之创建RedissonClient实例 3.可重入锁源码之lua脚本加锁逻辑 4.可重入锁源码之WatchDog维持加锁逻辑 5.可重入锁源码之可重入加锁逻辑 6.可重入锁源码之锁的互斥阻塞逻辑 7.可重入锁源码之释放锁逻辑 8.可重入锁…...

计算机毕业设计SpringBoot+Vue.js球队训练信息管理系统(源码+文档+PPT+讲解)
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 作者简介:Java领…...
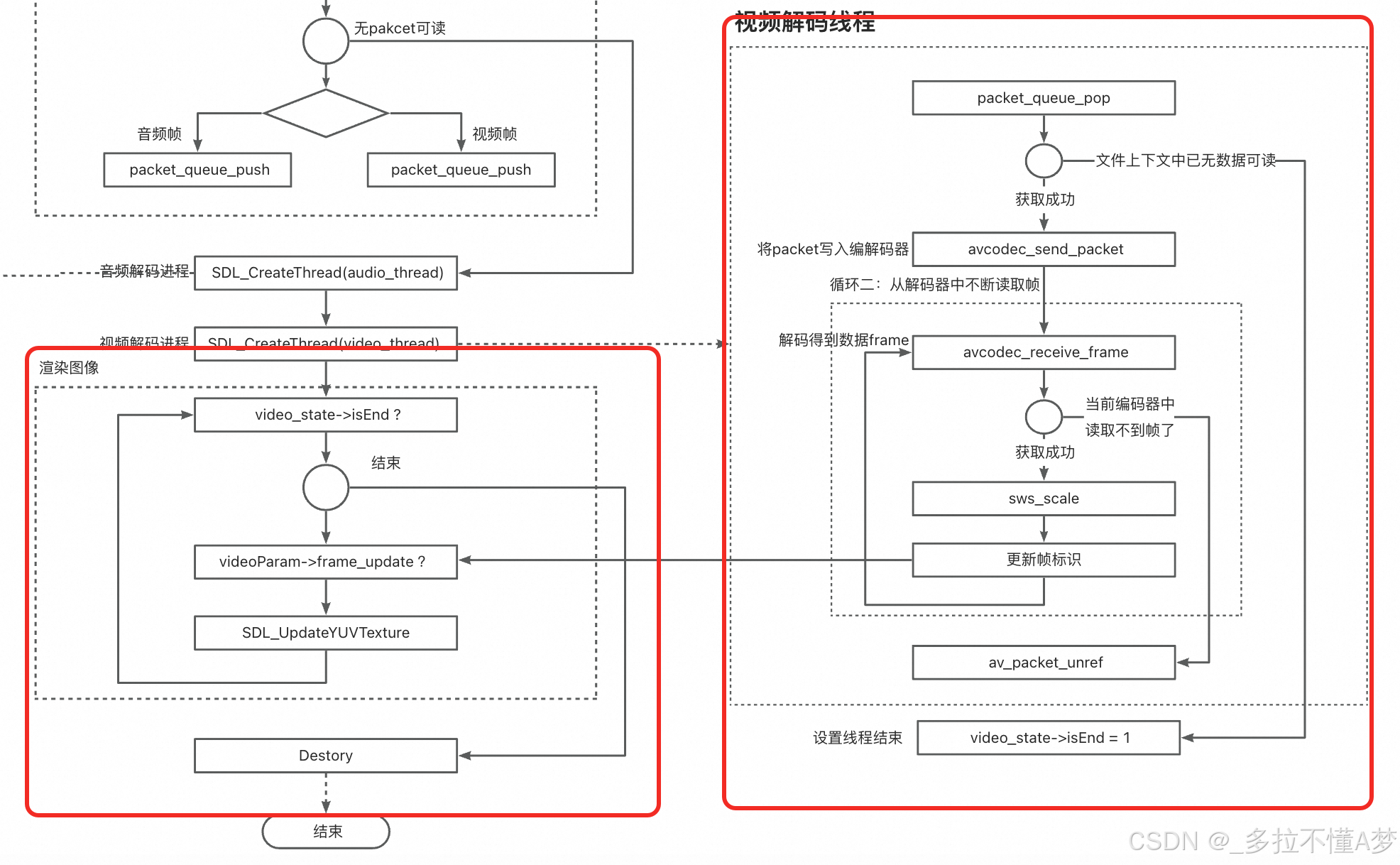
FFmpeg入门:最简单的音视频播放器
FFmpeg入门:最简单的音视频播放器 前两章,我们已经了解了分别如何构建一个简单和音频播放器和视频播放器。 FFmpeg入门:最简单的音频播放器 FFmpeg入门:最简单的视频播放器 本章我们将结合上述两章的知识,看看如何融…...

java 查找两个集合的交集部分数据
利用了Java 8的Stream API,代码简洁且效率高 import java.util.stream.Collectors; import java.util.List; import java.util.HashSet; import java.util.Set;public class ListIntersection {public static List<Long> findIntersection(List<Long> …...
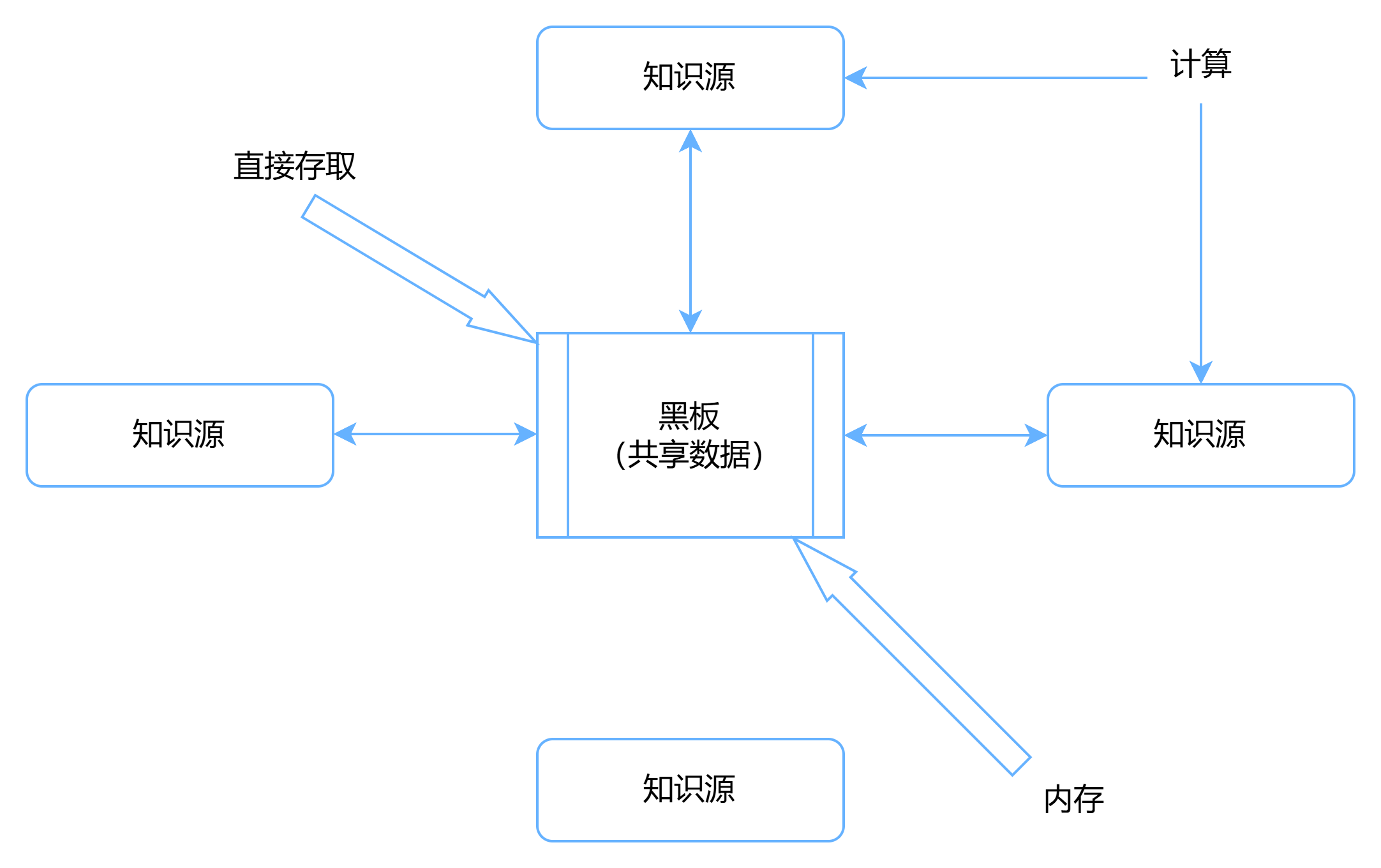
【系统架构设计师】以数据为中心的体系结构风格
目录 1. 说明2. 仓库体系结构风格3. 黑板体系结构风格 1. 说明 1.以数据为中心的体系结构风格主要包括仓库体系结构风格和黑板体系结构风格。 2. 仓库体系结构风格 1.仓库(Repository)是存储和维护数据的中心场所。2.在仓库风格中,有两种不…...
实现自动递增编号的完整解决方案)
通过HTML有序列表(ol/li)实现自动递增编号的完整解决方案
以下是通过HTML有序列表(ol/li)实现自动递增编号的完整解决方案: <!DOCTYPE html> <html> <head> <style> /* 基础样式 */ ol {margin: 1em 0;padding-left: 2em; }/* 方案1:默认数字编号 */ ol.default {list-style-type: dec…...
【Python 数据结构 4.单向链表】
目录 一、单向链表的基本概念 1.单向链表的概念 2.单向链表的元素插入 元素插入的步骤 3.单向链表的元素删除 元素删除的步骤 4.单向链表的元素查找 元素查找的步骤 5.单向链表的元素索引 元素索引的步骤 6.单向链表的元素修改 元素修改的步骤 二、Python中的单向链表 编辑 三…...
指南)
基于 vLLM 部署 LSTM 时序预测模型的“下饭”(智能告警预测与根因分析部署)指南
Alright,各位看官老爷们,准备好迎接史上最爆笑、最通俗易懂的 “基于 vLLM 部署 LSTM 时序预测模型的智能告警预测与根因分析部署指南” 吗? 保证让你笑出猪叫,看完直接变身技术大咖!🚀😂 咱们今天的主题,就像是要打造一个“智能运维小管家”! 这个小管家,不仅能提…...

Java多线程与高并发专题——ConcurrentHashMap 在 Java7 和 8 有何不同?
引入 上一篇我们提到HashMap 是线程不安全的,并推荐使用线程安全同时性能比较好的 ConcurrentHashMap。 而在 Java 8 中,对于 ConcurrentHashMap 这个常用的工具类进行了很大的升级,对比之前 Java 7 版本在诸多方面都进行了调整和变化。不过…...

NL2SQL-基于Dify+阿里通义千问大模型,实现自然语音自动生产SQL语句
本文基于Dify阿里通义千问大模型,实现自然语音自动生产SQL语句功能,话不多说直接上效果图 我们可以试着问他几个问题 查询每个部门的员工数量SELECT d.dept_name, COUNT(e.emp_no) AS employee_count FROM employees e JOIN dept_emp de ON e.emp_no d…...

LeetCode 1328.破坏回文串:贪心
【LetMeFly】1328.破坏回文串:贪心 力扣题目链接:https://leetcode.cn/problems/break-a-palindrome/ 给你一个由小写英文字母组成的回文字符串 palindrome ,请你将其中 一个 字符用任意小写英文字母替换,使得结果字符串的 字典…...
计算机视觉|ViT详解:打破视觉与语言界限
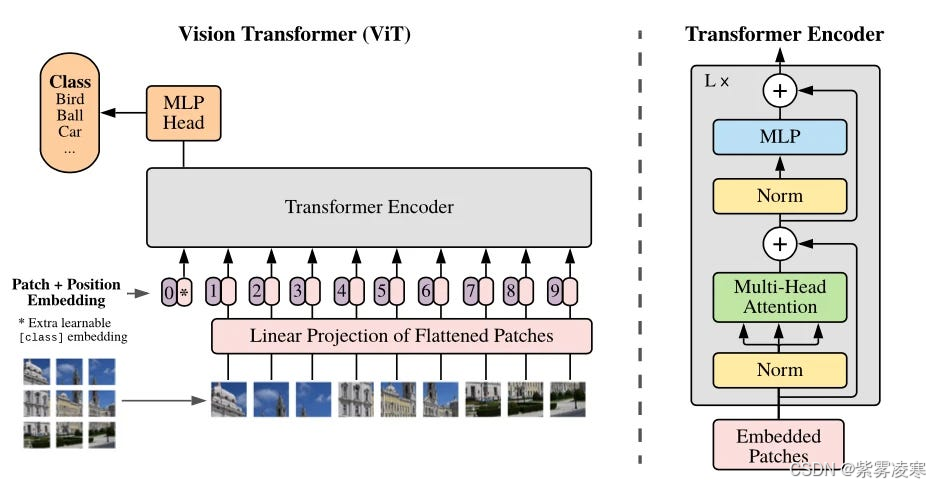
一、ViT 的诞生背景 在计算机视觉领域的发展中,卷积神经网络(CNN)一直占据重要地位。自 2012 年 AlexNet 在 ImageNet 大赛中取得优异成绩后,CNN 在图像分类任务中显示出强大能力。随后,VGG、ResNet 等深度网络架构不…...

//定义一个方法,把int数组中的数据按照指定的格式拼接成一个字符串返回,调用该方法,并在控制台输出结果
import java.util.Scanner; public class cha{ public static void main(String[] args){//定义一个方法,把int数组中的数据按照指定的格式拼接成一个字符串返回,调用该方法,并在控制台输出结果//eg: 数组为:int[] arr…...
Python快捷手册
Python快捷手册 后续会陆续更新Python对应的依赖或者工具使用方法 文章目录 Python快捷手册[toc]1-依赖1-词云小工具2-图片添加文字3-BeautifulSoup网络爬虫4-Tkinter界面绘制5-PDF转Word 2-开发1-多线程和队列 3-运维1-Requirement依赖2-波尔实验室3-Anaconda3使用教程4-CentO…...

QT5 GPU使用
一、问题1 1、现象 2、原因分析 出现上图错误,无法创建EGL表面,错误=0x300b。申请不上native window有可能是缺少libqeglfs-mali-integration.so 这个库 3、解决方法 需要将其adb push 到小机端的/usr/lib/qt5/plugins/egldeviceintegrat…...

如何在Spring Boot中读取JAR包内resources目录下文件
精心整理了最新的面试资料和简历模板,有需要的可以自行获取 点击前往百度网盘获取 点击前往夸克网盘获取 以下是如何在Spring Boot中读取JAR包内resources目录下文件的教程,分为多种方法及详细说明: 方法1:使用 ClassPathResour…...

AssetRipper完整指南:快速掌握Unity游戏资源提取的终极方法
AssetRipper完整指南:快速掌握Unity游戏资源提取的终极方法 【免费下载链接】AssetRipper GUI Application to work with engine assets, asset bundles, and serialized files 项目地址: https://gitcode.com/GitHub_Trending/as/AssetRipper 在游戏开发和逆…...

使用Taotoken后我们如何观测与优化大模型API调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken后我们如何观测与优化大模型API调用成本 1. 从黑盒到透明:成本观测的第一步 在接入大模型API的初期&…...

终极指南:如何用FFXIV TexTools模组管理器轻松定制最终幻想14外观
终极指南:如何用FFXIV TexTools模组管理器轻松定制最终幻想14外观 【免费下载链接】FFXIV_TexTools_UI 项目地址: https://gitcode.com/gh_mirrors/ff/FFXIV_TexTools_UI FFXIV TexTools模组管理器是《最终幻想14》玩家社区中最强大的外观定制工具ÿ…...

TI SimpleLink CC26xx/CC13xx超低功耗无线平台架构解析与实战
1. 项目概述:为什么我们需要一个“超低功耗”的无线平台?如果你正在设计一个需要靠电池运行数年甚至十年的物联网设备,比如智能门锁、环境传感器或者可穿戴健康监测器,那么“功耗”这个词绝对是你每天都要面对的噩梦。传统的无线方…...

5步解锁显卡隐藏性能:NVIDIA Profile Inspector全面指南
5步解锁显卡隐藏性能:NVIDIA Profile Inspector全面指南 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector 想要让显卡发挥100%性能潜力吗?NVIDIA Profile Inspector作为一款专业的…...

终极Windows更新修复指南:用Reset-Windows-Update-Tool一键解决所有更新问题
终极Windows更新修复指南:用Reset-Windows-Update-Tool一键解决所有更新问题 【免费下载链接】Reset-Windows-Update-Tool Troubleshooting Tool with Windows Updates (Developed in Dev-C). 项目地址: https://gitcode.com/gh_mirrors/re/Reset-Windows-Update-…...

蓝桥杯嵌入式:从零到一的考场环境搭建与避坑指南
1. 蓝桥杯嵌入式开发环境概述 参加蓝桥杯嵌入式比赛,环境搭建是第一个需要攻克的难关。很多同学第一次参赛时,往往把大量时间花在调试环境上,等到真正开始写代码时已经手忙脚乱。我在担任多届蓝桥杯志愿者时,见过太多选手因为环境…...

企业内如何通过Taotoken实现大模型API的统一管理与审计
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内如何通过Taotoken实现大模型API的统一管理与审计 对于需要将大模型能力集成到内部系统的企业而言,直接让各个团队…...

从零构建μC/OS-II硬件抽象层:以ARM7 LPC2292为例详解移植核心
1. 项目概述与核心思路十年前,我第一次把μC/OS-II从一个ARM7开发板搬到另一个不同型号的ARM7芯片上,光是改启动文件和中断向量表就折腾了一周。那时候我就想,要是有一套标准化的“中间层”,能把芯片底层的差异给屏蔽掉࿰…...

Google发现的神级Prompt工程新技巧:重复Prompt提升效果
Google发现的神级Prompt工程新技巧:重复Prompt提升效果 关键词:Prompt工程、提示词优化、LLM技巧、GPT技巧、AI提问技巧、Prompt Repetition、提示词工程一、最近发现一个被低估的Prompt技巧 pdf地址 https://arxiv.org/pdf/2512.14982最近在看一篇 Goog…...