Matlab与ROS(1/2)---服务端和客户端数据通信(五)
0. 简介
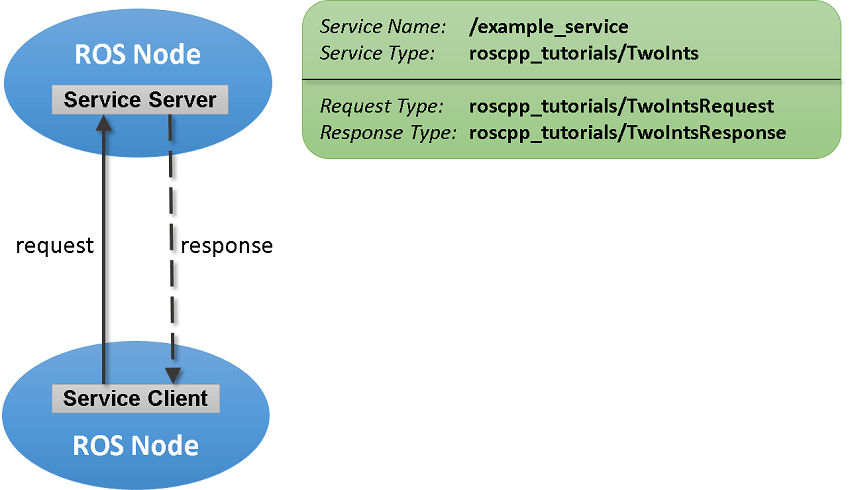
在前几讲我们讲了Matlab中的Message以及Topic的相关知识。而ROS主要支持的通信机制还有服务这一类。服务通过允许请求以及响应的通信方式,来给整个系统完成更紧密的耦合。服务客户端向服务服务器发送请求消息并等待响应。服务器将使用请求中的数据构造响应消息并将其发送回客户端。每个服务都有一个类型,该类型决定请求和响应消息的结构。
1. ROS1的服务端和客户端
1.1 创建服务端
在ROS1当中,如果希望创建一个简单的服务服务器,并在调用服务时能够显示“A service client is calling”。使用rosssvcserver命令创建服务。从而指定服务名称和服务消息类型。然后还要将回调函数定义为exampleHelperROSEmptyCallback。
为了获得更快的性能,一般我们在设置rossvcsrve时候带上结构格式消息类型。
testserver = rossvcserver("/test","std_srvs/Empty",@exampleHelperROSEmptyCallback,"DataFormat","struct")
testserver =
ServiceServer with properties:
ServiceType: ‘std_srvs/Empty’
ServiceName: ‘/test’
NewRequestFcn: @exampleHelperROSEmptyCallback
DataFormat: ‘struct’
当列出ROS网络中的所有服务时,可以看到新服务/test。
rosservice list
/add
/matlab_global_node_55791/get_loggers
/matlab_global_node_55791/set_logger_level
/node_1/get_loggers
/node_1/set_logger_level
/node_2/get_loggers
/node_2/set_logger_level
/node_3/get_loggers
/node_3/set_logger_level
/reply
/test
此外还可以使用rosservice info获取有关您的服务的更多信息。
rosservice info /test
Node: /matlab_global_node_55791
URI: rosrpc://ah-csalzber:51639
Type: std_srvs/Empty
Args: MessageType
1.2 创建客户端
使用服务客户机从ROS服务服务器请求信息。要创建客户端,请使用带有服务名称的rossvcclient作为参数。
为我们刚刚创建的/test服务创建一个服务客户机。
testclient = rossvcclient("/test","DataFormat","struct")
testclient =
ServiceClient with properties:
ServiceType: ‘std_srvs/Empty’
ServiceName: ‘/test’
DataFormat: ‘struct’
为服务创建一个空请求消息。使用rosmessage函数并将客户端作为第一个参数传递。这将创建一个具有服务指定的消息类型和格式的服务请求函数。
testreq = rosmessage(testclient)
testreq = struct with fields:
MessageType: ‘std_srvs/EmptyRequest’
确保服务已连接到客户端,并在必要时等待客户端连接。
waitForServer(testclient,"Timeout",3)
当您希望从服务器获得响应时,请使用call函数,该函数将调用服务服务器并返回响应。您之前创建的服务服务器将返回一个空响应。此外,它将调用exampleHelperROSEmptyCallback函数并显示字符串“A service client is calling”。您还可以定义一个Timeout参数,该参数指示客户机应该等待响应的时间。
testresp = call(testclient,testreq,"Timeout",3);
如果上面的调用函数失败,就会出错。如果希望使用条件对调用失败做出反应,则可以从调用函数返回状态和statustext输出,而不是错误。状态输出指示调用是否成功,而statustext提供其他信息。waitForServer也可以返回类似的输出。
numCallFailures = 0;
[testresp,status,statustext] = call(testclient,testreq,"Timeout",3);
if ~statusnumCallFailures = numCallFailues + 1;fprintf("Call failure number %d. Error cause: %s\n",numCallFailures,statustext)
elsedisp(testresp)
end
MessageType: 'std_srvs/EmptyResponse'
1.3 两数之和
如果说我们想要完成两数求和这样的功能,我们可以先将现有的服务类型roscpp_tutorials/TwoInts用于此任务。您可以通过调用rosmsg show来检查请求和响应消息的结构。请求包含两个整数A和B,响应包含它们在Sum中的加法。
rosmsg show roscpp_tutorials/TwoIntsRequest
int64 A
int64 B
rosmsg show roscpp_tutorials/TwoIntsResponse
int64 Sum
使用此消息类型创建服务服务器和计算加法的回调函数。为了方便起见,exampleHelperROSSumCallback函数已经实现了这个计算。将函数指定为回调函数。
sumserver = rossvcserver("/sum","roscpp_tutorials/TwoInts",@exampleHelperROSSumCallback,"DataFormat","struct")
sumserver =
ServiceServer with properties:
ServiceType: ‘roscpp_tutorials/TwoInts’
ServiceName: ‘/sum’
NewRequestFcn: @exampleHelperROSSumCallback
DataFormat: ‘struct’
要调用服务服务器,必须创建一个服务客户机。注意,这个客户端可以在ROS网络中的任何地方创建。为了本例的目的,我们将在MATLAB中为/sum服务创建一个客户端。
sumclient = rossvcclient("/sum","DataFormat","struct")
sumreq = rosmessage(sumclient);
sumreq.A = int64(2);
sumreq.B = int64(1)
if isServerAvailable(sumclient)sumresp = call(sumclient,sumreq,"Timeout",3)
elseerror("Service server not available on network")
end
sumresp = struct with fields:
MessageType: ‘roscpp_tutorials/TwoIntsResponse’
Sum: 3
2. ROS2的服务端和客户端
…详情请参照古月居
相关文章:
Matlab与ROS(1/2)---服务端和客户端数据通信(五)
0. 简介 在前几讲我们讲了Matlab中的Message以及Topic的相关知识。而ROS主要支持的通信机制还有服务这一类。服务通过允许请求以及响应的通信方式,来给整个系统完成更紧密的耦合。服务客户端向服务服务器发送请求消息并等待响应。服务器将使用请求中的数据构造响应…...

数字化转型的避坑指南:细说数字化转型十二大坑
随着信息技术的快速发展,数字化转型已经成为许多企业发展的必经之路。然而,数字化转型过程中也存在许多坑,如果不谨慎处理,就可能导致企业陷入困境。本文将细说数字化转型的十二大坑,并提供相应的避坑指南。 1、不了解…...

pt05Encapsulationinherit
Encapsulation &inherit 封装继承 封装 向类外提供必要的功能,隐藏实现的细节, 代码可读性更高优势:简化编程,使用者不必了解具体的实现细节,只需要调用对外提供的功能。私有成员:作用:无需向类外提供…...
面向对象编程(基础)9:封装性(encapsulation)
目录 9.1 为什么需要封装? 而“高内聚,低耦合”的体现之一: 9.2 何为封装性? 9.3 Java如何实现数据封装 9.4 封装性的体现 9.4.1 成员变量/属性私有化 实现步骤: 成员变量封装的好处: 9.4.2 私有化…...

fate-serving-server增加取数逻辑并源码编译
1.什么是fate-serving-server? FATE-Serving 是一个高性能、工业化的联邦学习模型服务系统,专为生产环境而设计,主要用于在线推理。 2.fate-serving-server源码编译 下载fate-serving-serving项目(GitHub - FederatedAI/FATE-Serving: A scalable, h…...
循环队列、双端队列 C和C++
队列 目录 概念 实现方式 顺序队列 循环队列 队列的数组实现 用循环链表实现队列 STL 之 queue 实现队列 STL 之 dequeue 实现双端队列 概念 队列是一种特殊的线性表,它只允许在表的前端(称为队头,front)进行删除操作…...
)
正则表达式(语法+例子)
文章目录一、介绍二、语法1、匹配字符2、表示数量的字符3、边界字符4、其他字符5、转义字符三、例子1、邮箱2、用逗号分隔的数字集合1,23、允许一位小数4、20yy-mm-dd日期格式5、手机号6、匹配html、xml标签一、介绍 正则表达式(Regular Expression)&am…...
Properties和IO流集合的方法
方法名说明void load(InputStream inStream)从输入字节流读取属性列表(键和元素)void load(Reader reader)从输入字符流读取属性列表(键和元素对)void store(OutputStream out,String comments)将此属性列表(键和元素对…...
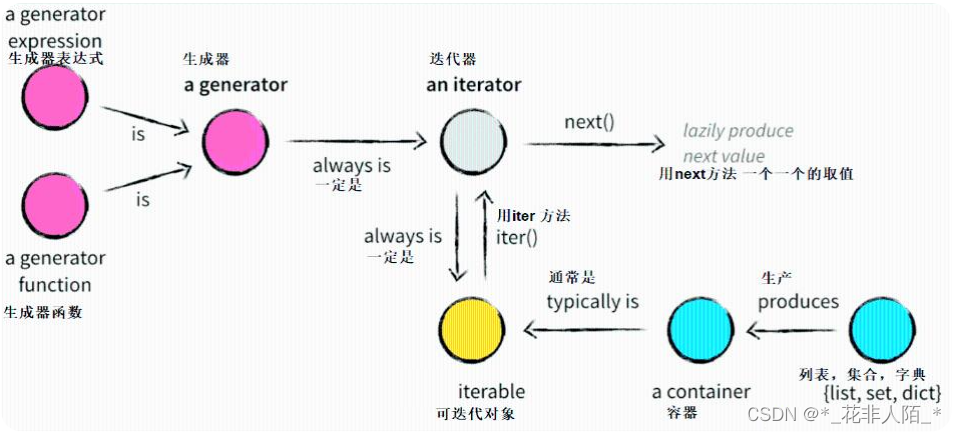
python 生成器、迭代器、动态新增属性及方法
目录 一、生成器 1、生成器定义 2、生成器存在的意义 3、创建生成器方式一(生成器表达式) 4. 创建生成器方式二(生成器函数) 1. 生成器函数 2. 生成器函数的工作原理 5. 总结 1. 什么是生成器 2. 生成器特点 二、迭代器…...

Java处理JSON
Java处理json有很多种方法,在这里总结一下。 1 Jackson Spring MVC 默认采用Jackson解析Json,出于最小依赖的考虑,也许Json解析第一选择就应该是Jackson。 1.1 引入的包 Jackson核心模块由三部分组成:jackson-core、jackson-a…...

58-Map和Set练习-LeetCode692前k个高频单词
题目 给定一个单词列表 words 和一个整数 k ,返回前 k 个出现次数最多的单词。 返回的答案应该按单词出现频率由高到低排序。如果不同的单词有相同出现频率, 按字典顺序 排序。 示例 1: 输入: words ["i", "love", …...
线程生命周期及五种状态
文章目录一、线程生命周期及五种状态1、New(初始化状态)2、Runnable(就绪状态)3、Running(运行状态)4、Blocked(阻塞状态)5、Terminated(终止状态)二、线程基本方法1、线程等待(wait)2、线程睡眠(sleep)3、…...

OBCP第八章 OB运维、监控与异常处理-灾难恢复
灾难恢复是指当数据库中的数据在被有意或无意破坏后复原数据库所需要执行的活动 回收站:回收站在原理上说就是一个数据字典表,放置用户删除的数据库对象信息。用户删除的东西被放入回收站后,其实仍然占据着物理空间,除非您手动进…...

亚马逊云科技Serverless Data:数字经济下的创新动能
Serverless时代已经到来!企业的技术架构,总是伴随着不断增长的数据与日趋复杂的业务持续演进。如何通过构建更易用的技术架构来聚焦在业务本身,而不必在底层基础设施的管理上投入过多的精力,是数据驱动型企业需要思考的重要议题。…...

【Ruby学习笔记】15.Ruby 异常
Ruby 异常 异常和执行总是被联系在一起。如果您打开一个不存在的文件,且没有恰当地处理这种情况,那么您的程序则被认为是低质量的。 如果异常发生,则程序停止。异常用于处理各种类型的错误,这些错误可能在程序执行期间发生&…...
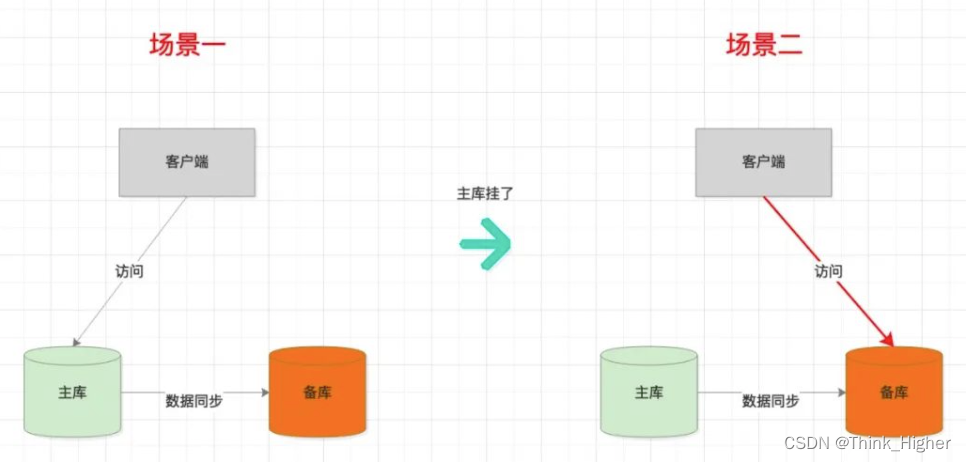
聊聊MySQL主从延迟
文章目录 MySQL 的高可用是如何实现的呢?二、什么是主备延迟?三、主备延迟常见原因1、备库机器配置差2、备库干私活3、大事务四、主库不可用,主备切换有哪些策略?1、可靠优先2、可用优先实验一实验二3、结论MySQL 的高可用是如何实现的呢? 高可用性(high availability,缩…...

【C++从0到1】19、C++中多条件的if语句
C从0到1全系列教程 1、多条件的if语句 语法: if (表达式一) { // 表达式一为真时执行的语句。 } else if (表达式二) {// 表达式二为真时执行的语句。 } else if (表达式三) {// 表达式三为真时执行的语句。 } …… else if (表达式n) {// 表达式n为真时执行的语句。…...
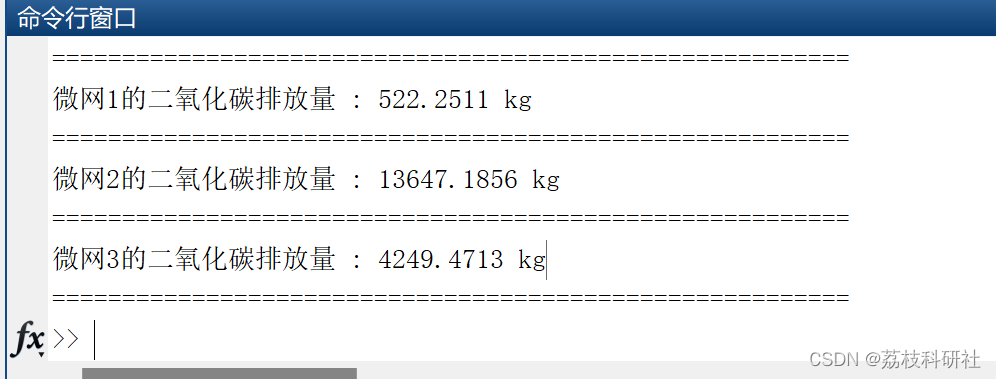
【多微电网】计及碳排放的基于交替方向乘子法(ADMM)的多微网电能交互分布式运行策略研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

Linux(centos7)安装防火墙firewalld及开放端口相关命令
安装firewalld 防火墙命令: yum install firewalld 安装完成,查看防火墙状态为 not running,即未运行,输入命令开启: 添加开放端口: 防火墙相关命令: 查看防火墙状态 systemctl status firewa…...
Linux部署.Net Core Web项目
本文主要记录我在Linux(Ubuntu)上部署.net core 的操作记录,也便于以后部署。 如对您有所帮助,不胜荣幸~ 文章目录前言一、准备工作1. 版本信息2. windows端web项目二、操作步骤1. Linux 配置 .net 运行环境1.1 查看最新 .net 运行环境的下载路径1.2 安装…...

别只点‘Passive’!深入理解Altium Designer引脚电气类型,从根源上杜绝原理图ERC错误
深入解析Altium Designer引脚电气类型:从原理到实践的设计规范 在电子设计自动化(EDA)领域,原理图设计是整个产品开发流程的基石。许多工程师在使用Altium Designer(AD)时,往往将注意力集中在布…...
)
Cursor最新版0.44.11配置DeepSeek-R1模型保姆级教程(含报错解决方案)
Cursor 0.44.11深度适配DeepSeek-R1模型全流程指南 当技术爱好者第一次在Cursor中尝试调用DeepSeek-R1模型时,往往会遇到各种"水土不服"的情况。就像刚拿到新相机的摄影师需要调整镜头焦距一样,我们需要对Cursor进行精确配置才能充分发挥这个强…...

利用OFA-Image-Caption自动生成Latex论文图表标题与描述
利用OFA-Image-Caption自动生成Latex论文图表标题与描述 写论文最烦人的步骤是什么?对我而言,除了反复修改格式,就是给那一大堆图表想标题和写描述了。一张图,你得想个既准确又简洁的标题,还得在正文里引用它…...

从理论到实践:在快马平台构建基于openclaw的物流分拣仿真系统
最近在研究物流自动化分拣系统时,发现openclaw机械爪控制在实际应用中存在不少痛点。传统开发流程需要从零搭建仿真环境、编写控制逻辑、调试物理交互,整个过程耗时耗力。于是尝试用InsCode(快马)平台快速构建了一个物流分拣仿真系统,效果出乎…...

终极桌面歌词解决方案:LyricsX 让你的音乐体验全面升级
终极桌面歌词解决方案:LyricsX 让你的音乐体验全面升级 【免费下载链接】Lyrics Swift-based iTunes plug-in to display lyrics on the desktop. 项目地址: https://gitcode.com/gh_mirrors/lyr/Lyrics 在macOS平台上享受音乐时,你是否曾渴望拥有…...

Llama-3.2V-11B-cot效果实测:同一张图不同提问下的CoT推理路径对比分析
Llama-3.2V-11B-cot效果实测:同一张图不同提问下的CoT推理路径对比分析 1. 工具概览与测试目标 Llama-3.2V-11B-cot是基于Meta多模态大模型开发的专业视觉推理工具,特别针对双卡4090环境进行了深度优化。本次测试将聚焦其核心功能——Chain of Thought…...

每日一题 力扣 3548. 等和矩阵分割 II 前缀和 哈希表 C++ 题解
文章目录题目描述思路简述代码实现复杂度分析踩坑记录题目描述 力扣 3548. 等和矩阵分割 II 示例 1: 输入: grid [[1,4],[2,3]] 输出: true 解释: 在第 0 行和第 1 行之间进行水平分割,结果两部分的元素和为 1 4 5…...

DownKyi架构深度解析:高效B站视频下载工具的技术实现与实战指南
DownKyi架构深度解析:高效B站视频下载工具的技术实现与实战指南 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印…...
LumiPixel Canvas Quest生成人像的细节优化:高清修复与面部修复技术详解
LumiPixel Canvas Quest生成人像的细节优化:高清修复与面部修复技术详解 1. 为什么需要关注人像生成质量 用AI生成人像时,最让人头疼的就是面部细节问题。你可能遇到过这样的情况:生成的图片整体效果不错,但放大一看,…...

解码 DINO 核心:三大创新如何重塑端到端目标检测
1. 从DETR到DINO:目标检测的范式革命 记得我第一次用Faster R-CNN做目标检测时,光是调整锚框尺寸就花了整整三天。这种传统检测方法就像用老式打字机写代码——每个环节都需要手工微调。直到2020年DETR横空出世,才让我意识到目标检测还能这么…...