zed驱动的安装 及 遇到问题 及 ros标定
安装zed相机驱动
zed驱动官网
下载.run文件
chmod +x ZED_SDK_Ubuntu18_cuda10.2_v4.0.1.zstd.run #换自己的版本号
./ZED_SDK_Ubuntu18_cuda10.2_v4.0.1.zstd.run #换自己的版本号
当遇到 zstd: not found … Decompression failed.

重新安装,执行:
sudo aptitude install zstd
若:

则:
sudo apt install aptitude
再执行:
sudo aptitude install zstd
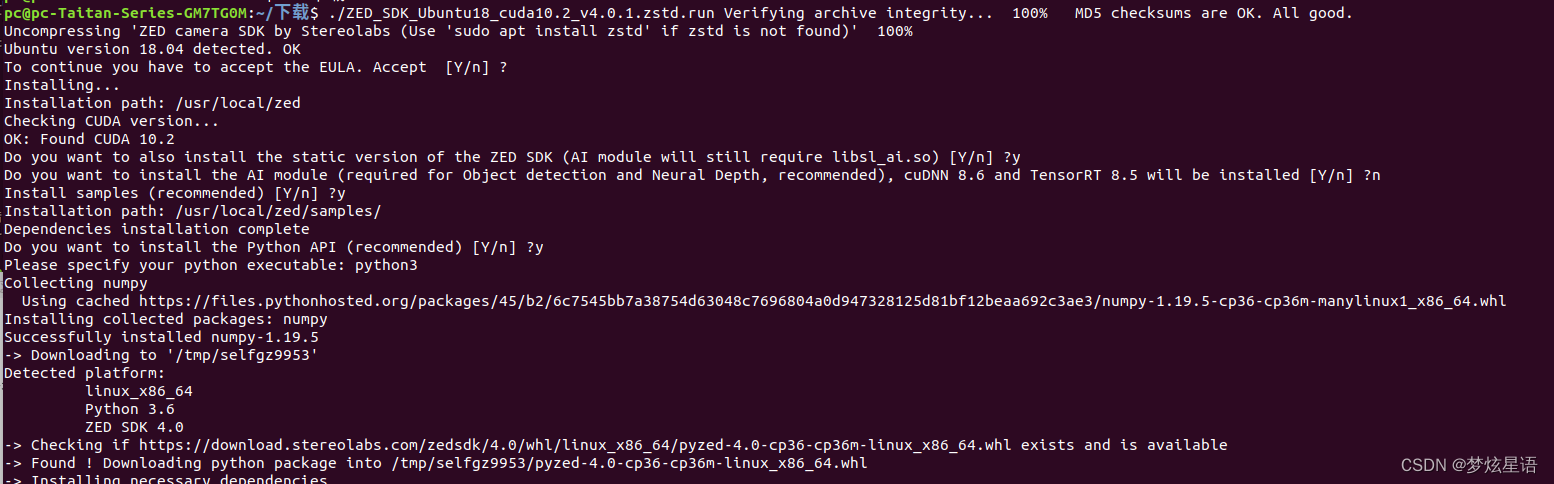
安装 zed 驱动
./ZED_SDK_Ubuntu18_cuda10.2_v4.0.1.zstd.run #换自己的版本号
重启电脑,插上zed摄像头,验证图像是否正常
cd /usr/local/zed/tools
./ZED_Explorer # 运行ZED_Explorer
./ZED_Depth_Viewer # 观察深度数据是否正常
卸载
cd /usr/local
sudo rm -rf zed
在ros下的使用参考ZED2相机SDK安装使用及ROS下使用
若报错:
RLException: [zed.launch] is neither a launch file in package [zed_wrapper] nor is [zed_wrapper] a launch file name
The traceback for the exception was written to the log file**

这个错误的原因是没有把launch文件添加到路径中。
解决方法:
添加文件到路径中
source devel/setup.bash
重新编译,运行
catkin_makeroslaunch zed_wrapper zed.launch
标定:
标定板链接
下载zed所依赖的ros包
sudo apt-get install ros-melodic-camera-calibration
启动ZED相机
source ~/zed_ws/devel/setup.bash
roslaunch zed_wrapper zed.launch
标定双目
rosrun camera_calibration cameracalibrator.py --approximate 0.1 --size 8x6 --square 0.024 right:=/zed/zed_node/right/image_rect_color left:=/zed/zed_node/left/image_rect_color right_camera:=/zed/zed_node/right left_camera:=/zed/zed_node/left --no-service-check
–approximate -----------摄像机校准器可以处理时间戳不完全相同的图像,当前设置为 0.1 秒,意思是只要时间戳差小于 0.1 秒,标定程序就可以正常运行。
–size 8x6 -----------------当前标定板的大小-1, 参数中为字母x
–square 0.024 ----------为每个棋盘格的边长,单位为米(我的图片打印出来测量为24mm)
–image:=/camera/image_raw------图像Topic
–camera:=/camera--------------------相机名
启动界面如下,把棋盘格放到相机视野中,标定过程中 X,Y,Size 会不断变化:
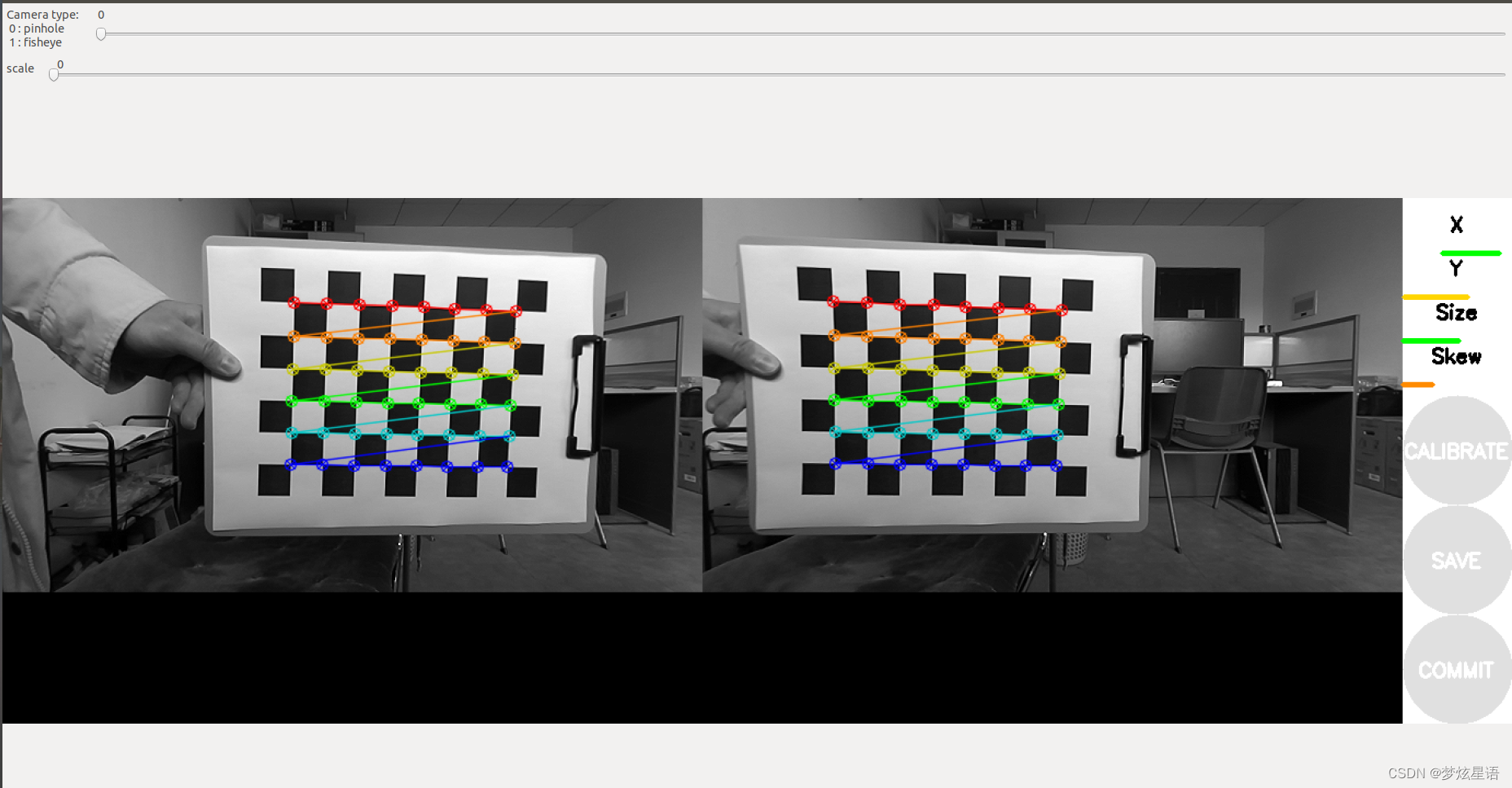
从图中可以看到,在GUI的右侧有X,Y,Size,Skew四个标志条
它们的含义是:
x:表示标定板在水平方向上的位置,从左到右逐渐变大。
y:表示标定板在垂直方向上的位置,从上到下逐渐变大。
Size:表示标定板在图中所占比例的大小,从远到近逐渐变大。
Skew:表示标定板在图像中倾斜的角度大小,随倾斜角度增大逐渐变大。
我们的工作就是从左到右、从上到下,从远到近,并且不断变换标定板的角度,使四个标志条都变为绿色。
点击CALIBRATE
点击SAVE保存标定数据
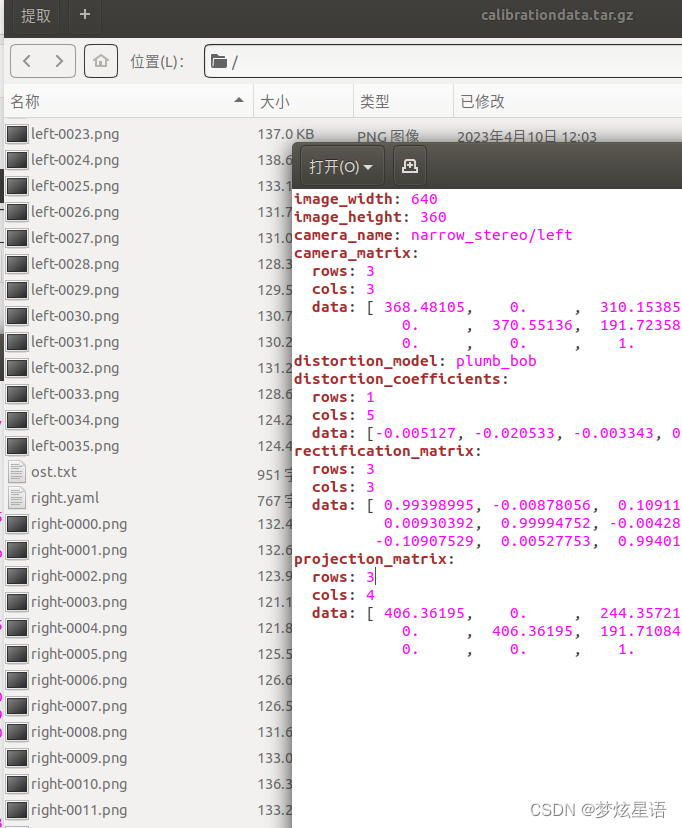
标定数据会保存到:Computer/tmp/calibrationdate.tar.gz
打开后会得到图片和参数的详细信息:
相关文章:
zed驱动的安装 及 遇到问题 及 ros标定
安装zed相机驱动 zed驱动官网 下载.run文件 chmod x ZED_SDK_Ubuntu18_cuda10.2_v4.0.1.zstd.run #换自己的版本号 ./ZED_SDK_Ubuntu18_cuda10.2_v4.0.1.zstd.run #换自己的版本号当遇到 zstd: not found … Decompression failed. 重新安装&a…...

打车代驾顺风车货车租运系统开发功能(司机端)
随着社会经济水平的提高,人们对于打车代驾服务要求也不断提高,更多的人愿意在手机上通过打车代驾APP小程序软件来预约叫车,选择打车代驾服务。打车代驾软件开发是基于广大用户的要求而产生的新型服务方式,满足大众预约出行需要&am…...
CT剂量及描述方法详细介绍
CT剂量和普通放射剂量的区别 普通放射剂量分布区域大,但一般集中在皮肤入射表面,用患者入射表面剂量(ESD)来表征射线剂量; CT剂量分布在窄带内,边缘与中心分布不均匀;且属于多层扫描; 1、在理想…...

Spring Boot应用优雅关闭
POM依赖 在需要实现优雅关闭的应用工程中增加下述依赖:部分启动器默认就依赖了Actuator启动器,如:spring-cloud-starter-netflix-eureka-server,那么下述依赖是可以省略的。 <dependency><groupId>org.springframewo…...
【实用技巧】7-Zip如何加密压缩文件?
7-Zip是一款免费且实用的压缩软件,除了提供多种压缩格式,还可以对压缩文件进行加密保护,加密后只有输入密码,才能打开压缩包里的文件。如果不知道怎么操作的小伙伴,就来看看小编的分享吧。 操作方法: 1、…...

Anaconda详细安装使用
如果想在conda里面删除某个环境,可以使用 conda remove -n name --all 来删除。 其中 conda info --envs 是查看环境,切换环境 activate base 。 Anaconda Anaconda | The Worlds Most Popular Data Science PlatformAnaconda is the birthplace of Pyt…...

git放弃修改,强制覆盖本地代码
在使用Git的过程中,有些时候我们只想要git服务器中的最新版本的项目,对于本地的项目中修改不做任何理会,就需要用到Git pull的强制覆盖,具体代码如下: $ git fetch --all $ git reset --hard origin/master $ git pu…...

大数据自我进阶(数据仓库)-暂未完全完成
什么时候需要数据仓库? 1.当决策者要进行战略分析或者展示统计的需求。 2.并且数据量非常庞大,而且各个都是数据孤岛。 当满足这2个条件后,就需要搭建数据仓库。 数据仓库的第一步(数据清洗) 为了能准确的分析&am…...

Springmvc中跨服务器文件上传
既然跨服务器,就要开启两个服务器,这里使用两个Tomcat代表两个服务器 文章目录 1.建立图片要上传到的服务器:FileUpload 2.建立上传图片的服务器:Tomcat 9.0.24 3.在Tomcat 9.0.24上部署文件上传的项目,写代码 3.1导入…...

常见漏洞扫描工具AWVS、AppScan、Nessus的使用
HVV笔记——常见漏洞扫描工具AWVS、AppScan、Nessus的使用1 AWVS1.1 安装部署1.2 激活1.3 登录1.4 扫描web应用程序1.4.1 需要账户密码登录的扫描1.4.2 利用录制登录序列脚本扫描1.4.3 利用定制cookie扫描1.5 扫描报告分析1.5.1 AWVS报告类型1.5.2 最常用的报告类型:…...
Vue学习——【第二弹】
前言 上一篇文章 Vue学习——【第一弹】 中我们学习了Vue的相关特点及语法,这篇文章接着通过浏览器中的Vue开发者工具扩展来进一步了解Vue的相关工作机制。 Vue的扩展 我们打开Vue的官方文档,点击导航栏中的生态系统,点击Devtools 接着我…...

恐怖的ChatGPT!
大家好,我是飞哥!不知道大家那边咋样。反正我最近感觉是快被ChatGPT包围了。打开手机也全是ChatGPT相关的信息,我的好几个老同学都在问我ChatGPT怎么用,部门内也在尝试用ChatGPT做一点新业务出来。那就干脆我就趁清明假期这一天宝…...
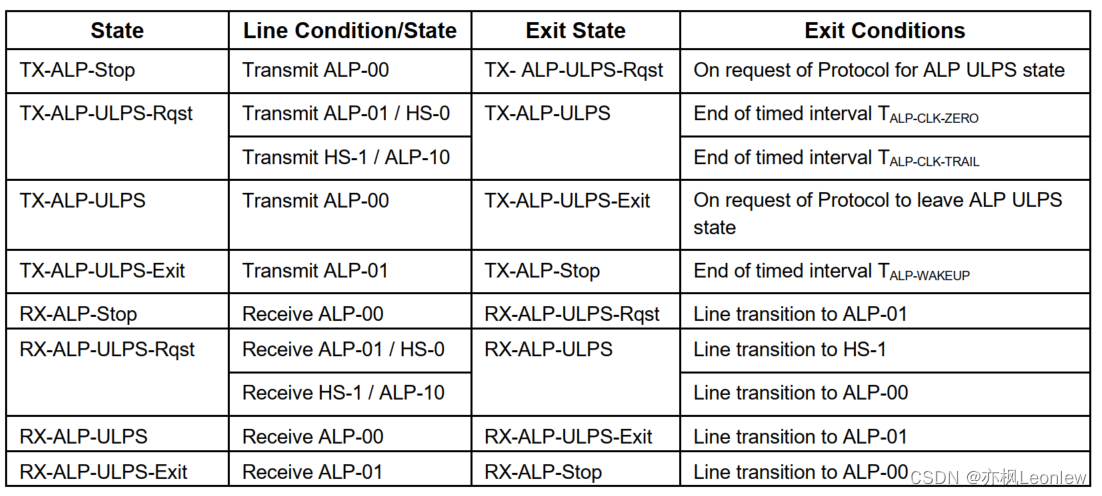
MIPI D-PHYv2.5笔记(12) -- Clock Lane的ULPS
声明:作者是做嵌入式软件开发的,并非专业的硬件设计人员,笔记内容根据自己的经验和对协议的理解输出,肯定存在有些理解和翻译不到位的地方,有疑问请参考原始规范看 LP Mode的Clock Lane ULPS 尽管Clock Lane不包含常规…...
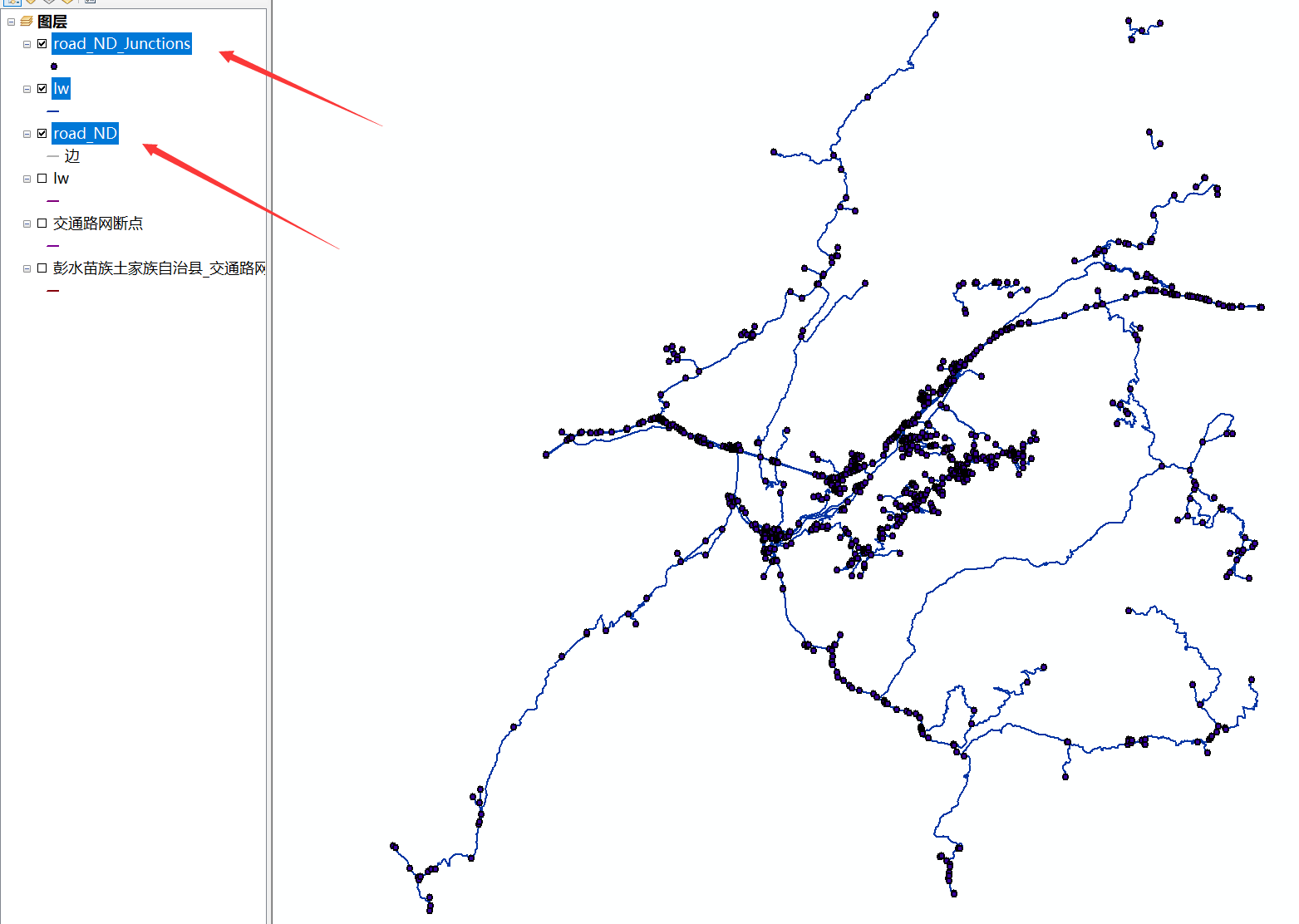
创建网络数据集
目的:主要是用来做路径规划。 第一步:加载用作构建网络数据集的道路网数据到arcmap。 第二步:做打断处理。【如果线数据未做过打断处理,需要做这一步。】 有两种方式【1、编辑器里面的高级编辑器的打断相交线功能;2、…...

从功能到年薪30W+的测试开发工程师,分享我这10年的职业规划路线
求职?择业?跳槽?职业规划? 作为一名初出茅庐的软件测试员,职业发展的道路的确蜿蜒曲折,面对一次次的岗位竞争,挑战一道道的面试关卡,一边带着疑惑,一边又要做出选择&…...

ChatGPT中文免登陆-ChatGPT中文版上线
ChatGPT不支持地区 ChatGPT 是一个开源平台,可在全球范围内使用,不应该存在地区限制。然而,由于某些原因,可能有地区对 ChatGPT 的访问有限制或屏蔽的情况。 如果您发现自己无法访问 ChatGPT,可以尝试以下解决方法&a…...

多线程之最大并行数
4核8线程,采取超线程技术,将一个核心模拟成两个线程。 public class 最大并行数 {public static void main(String[] args) {//向java虚拟机返回可用处理器的数目//getRuntime获取运行状态,获取可用线程数int countRuntime.getRuntime().ava…...
智慧城市发展的基本原理是什么?
智慧城市的建设与发展遵循一定的基本原理。随着智慧城市的持续迭代升级,智慧城市已经从信息化建设与信息技术产品应用阶段,演进到了信息化与城市现代化深度融合阶段,其基本原理也在发生变化。当前,随着数字技术的发展与成熟应用&a…...

技术宅小伙:利用JAVA开发个常用的编辑接口
大家好,今天的任务是创建一个常用的编辑接口。实际上,这个接口是在大约十点半时给我的,他说要在下午上线。我在7号接口完成之后,通过代码和预言室来实现这个业务。 首先,这是一个评论编辑接口,编辑的内容是…...
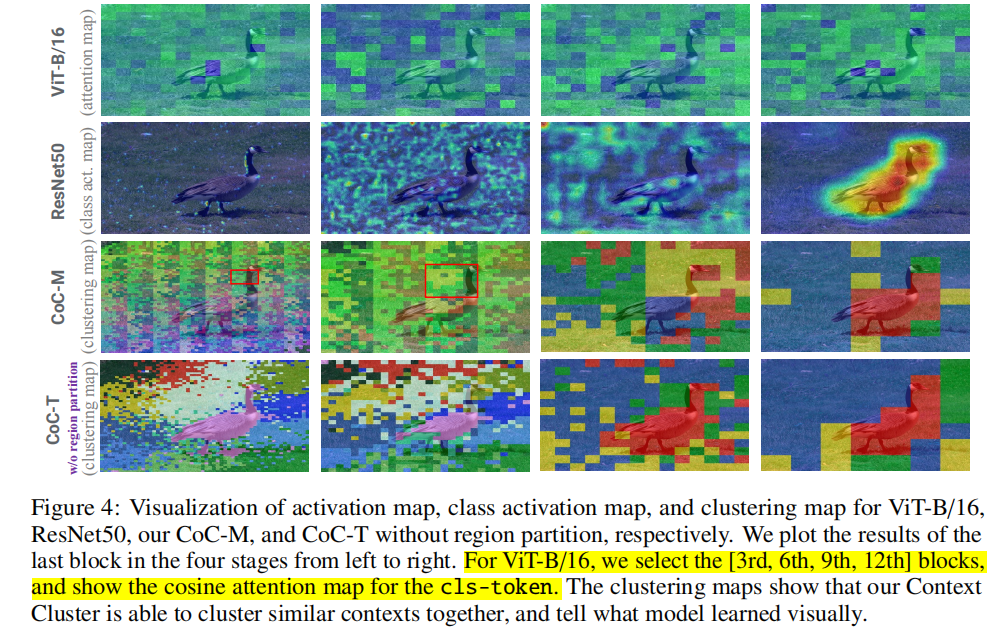
Image as set points【ICLR 2023 notable top 5%】
Code:https://github.com/ma-xu/Context-Cluster OpenReview:https://openreview.net/forum?idawnvqZja69 前置知识: 1)归纳偏置是否有用? 答:有效,但存在一定的限制。强inductive bias的架构…...

python系列【仅供参考】:mongo4.0.0 加用户认证 motor和pymongo的auth连接
mongo4.0.0 加用户认证 && motor和pymongo的auth连接 mongo4.0.0 加用户认证 摘要 一. 数据库版本 二. 为mongo 添加用户认证 1. 创建超级用户 3. 开启auth 4.重启mongo 5. 添加库用户 三.验证 四.pymongo,motor连接 摘要 正文 mongo4.0.0 加用户认证 摘要 本文介绍…...

3分钟掌握LaTeX公式转换Word的终极指南
3分钟掌握LaTeX公式转换Word的终极指南 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation 还在为学术论文中的数学公式复制烦恼吗?LaTeX…...

移动端部署实战:用PyTorch实现的MobileNetV2模型,教你如何压缩并部署到安卓设备
移动端AI模型部署实战:从PyTorch到安卓的MobileNetV2全流程指南 在移动设备上部署深度学习模型已成为AI落地的关键环节。想象一下,当你用手机拍照时实时识别人物和场景,或是通过智能家居摄像头检测异常行为——这些场景背后都离不开高效、轻量…...

C语言-函数的调用
目录: 一、函数名作为函数的输入参数 二、回调函数 1、回调函数的引入 2、回调与普通函数的调用 3、回调函数的作用 4、回调函数的程序编写 一、函数名作为函数的输入参数 函数参数传递分为两种,一种是值传递,一种是地址传递。一般我们…...

如何快速解锁WeMod高级功能:面向游戏玩家的完整免费方案
如何快速解锁WeMod高级功能:面向游戏玩家的完整免费方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 你是否为WeMod免费版的诸多限制感到…...

【USB3.0协议探秘】实战篇·三种复位事件的触发机制与链路状态变迁
1. 认识USB3.0的三种复位机制 刚接触USB3.0协议时,很多人会被各种复位类型绕晕。在实际开发中,我就遇到过因为混淆PowerOn Reset和Warm Reset导致设备无法正常初始化的情况。今天我们就来彻底搞懂这三种复位机制的区别和应用场景。 USB3.0协议定义了三种…...

AI Agent Harness恶意指令识别拦截
AI Agent Harness恶意指令识别拦截:构建新一代智能应用安全屏障摘要/引言 开门见山(Hook) 想象一下这个场景:你花了3个月精心搭建了一个**“全栈AI编程助手Agent集群”**——主Agent负责理解需求并拆解任务,代码生成Ag…...

从双非到科软:我的22408备考复盘与实战指南
1. 双非逆袭科软:我的备考心路历程 作为一名双非院校的计算机专业学生,我深知考研这条路有多难走。去年这个时候,我也和屏幕前的你一样,在知乎、贴吧疯狂搜索各种经验贴,既期待又忐忑。现在回想起来,从3月到…...
)
PySOT单目标跟踪实战:从零搭建环境到模型部署的避坑指南(手把手教学,附代码)
1. 环境准备:从零搭建PySOT开发环境 第一次接触PySOT时,我花了整整两天时间折腾环境配置,踩遍了所有能踩的坑。为了让你们少走弯路,我把这些经验整理成可复现的步骤。首先需要明确的是,PySOT对系统环境有特定要求&…...

【亲测免费】 CISP-DSG 数据安全培训教材课件标准版
CISP-DSG 数据安全培训教材课件标准版 【下载地址】CISP-DSG数据安全培训教材课件标准版 本仓库提供的是“注册数据安全治理专业人员”(Certified Information Security Professional - Data Security Governance,简称 CISP-DSG)的培训教材课…...