RK3588S imx415摄像头调试
一、环境
- soc:rk3588
- sensor:imx415
- board: AIO-3588SJD
- linux:rk3588_linux_release_20230301_v1.0.6e
二、imx415简介
- 品牌:SONY
- 型号:IMX415
- 接口:MIPI CSI
三、驱动移植
瑞芯微支持的摄像头,有个support list,
此次从该list中选择了IMX415
RK提供的默认sdk里面已经将支持的所有摄像头驱动都添加到了内核,所以不需要移植该驱动了。
需确认下移植驱动对应的一些信息
源程序
kernel/drivers/media/i2c/imx415.c
kernel/drivers/media/i2c/Makefile
kernel/drivers/media/i2c/Kconfig
kernel/arch/arm64/configs/rockchip_linxu_defconfig
- Makefile脚本
obj-$(CONFIG_VIDEO_IMX415) += imx415.o
config VIDEO_IMX415
tristate "Sony IMX415 sensor support"
depends on I2C && VIDEO_V4L2 && VIDEO_V4L2_SUBDEV_API
depends on MEDIA_CAMERA_SUPPORT
help
This is a Video4Linux2 sensor driver for the Sony
IMX415 camera.
To compile this driver as a module, choose M here: the
module will be called imx415.
- 驱动对应的宏开关
CONFIG_VIDEO_IMX415=y
设备树节点
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2022 Rockchip Electronics Co., Ltd.
*
*/
/ {
compatible = "radxa,rock-5b", "rockchip,rk3588";
camera_pwdn_gpio: camera-pwdn-gpio {
status = "okay";
compatible = "regulator-fixed";
regulator-name = "camera_pwdn_gpio";
regulator-always-on;
regulator-boot-on;
enable-active-high;
gpio = <&gpio1 RK_PB0 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&cam_pwdn_gpio>;
};
clk_cam_24m: external-camera-clock-24m {
status = "okay";
compatible = "fixed-clock";
clock-frequency = <24000000>;
clock-output-names = "clk_cam_24m";
#clock-cells = <0>;
};
};
&i2c3 {
status = "okay";
imx415: imx415@1a {
status = "okay";
compatible = "sony,imx415";
reg = <0x1a>;
clocks = <&cru CLK_MIPI_CAMARAOUT_M3>;
clock-names = "xvclk";
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera3_clk>;
power-domains = <&power RK3588_PD_VI>;
pwdn-gpios = <&gpio1 RK_PB0 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio4 RK_PA0 GPIO_ACTIVE_LOW>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT2022-PX1";
rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20";
port {
imx415_out0: endpoint {
remote-endpoint = <&mipidphy0_in_ucam0>;
data-lanes = <1 2 3 4>;
};
};
};
camera_imx219: camera-imx219@10 {
status = "disabled";
compatible = "sony,imx219";
reg = <0x10>;
clocks = <&clk_cam_24m>;
clock-names = "xvclk";
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "rpi-camera-v2";
rockchip,camera-module-lens-name = "default";
port {
imx219_out0: endpoint {
remote-endpoint = <&mipidphy0_in_ucam1>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dphy0_hw {
status = "okay";
};
&csi2_dphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipidphy0_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&imx415_out0>;
data-lanes = <1 2 3 4>;
};
mipidphy0_in_ucam1: endpoint@2 {
reg = <2>;
remote-endpoint = <&imx219_out0>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi2_csi2_input>;
};
};
};
};
&mipi2_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidphy0_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi2_in0>;
};
};
};
};
&rkcif {
status = "okay";
};
&rkcif_mipi_lvds2 {
status = "okay";
port {
cif_mipi2_in0: endpoint {
remote-endpoint = <&mipi2_csi2_output>;
};
};
};
&rkcif_mipi_lvds2_sditf {
status = "okay";
port {
mipi_lvds2_sditf: endpoint {
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkcif_mmu {
status = "okay";
};
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&rkisp0_vir0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds2_sditf>;
};
};
};
&pinctrl {
camera {
cam_pwdn_gpio: cam-pwdn-gpio {
rockchip,pins = <1 RK_PB0 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
};
设备树的信息最终转换成i2c_client,并传递给IMX415驱动 imx415_probe(){ compatible = “imx415”;与驱动的 of_match_table 保持一致
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT2022-PX1";
rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20";
四、调试技能
4.1 开机log
[ 3.656179] imx415 5-001a: driver version: 00.01.08
[ 3.656190] imx415 5-001a: Get hdr mode failed! no hdr default
[ 3.656223] imx415 5-001a: could not get default pinstate
[ 3.656228] imx415 5-001a: could not get sleep pinstate
[ 3.656264] imx415 5-001a: supply dvdd not found, using dummy regulator
[ 3.656341] imx415 5-001a: supply dovdd not found, using dummy regulator
[ 3.656373] imx415 5-001a: supply avdd not found, using dummy regulator
[ 3.670198] vendor storage:20190527 ret = 0
[ 3.725529] imx415 5-001a: Unexpected sensor id(000000), ret(-5)
4.2 查看IMX415设备
root@firefly:/# v4l2-ctl --list-formats-ext --device /dev/video0
v4l2-ctl --list-formats-ext --device /dev/video0
ioctl: VIDIOC_ENUM_FMT
Type: Video Capture Multiplanar
[0]: 'NV16' (Y/CbCr 4:2:2)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[1]: 'NV61' (Y/CrCb 4:2:2)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[2]: 'NV12' (Y/CbCr 4:2:0)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[3]: 'NV21' (Y/CrCb 4:2:0)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[4]: 'YUYV' (YUYV 4:2:2)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[5]: 'YVYU' (YVYU 4:2:2)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[6]: 'UYVY' (UYVY 4:2:2)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[7]: 'VYUY' (VYUY 4:2:2)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[8]: 'RGB3' (24-bit RGB 8-8-8)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[9]: 'BGR3' (24-bit BGR 8-8-8)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[10]: 'RGBP' (16-bit RGB 5-6-5)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[11]: 'BGRH' (18-bit BGRX 6-6-6-14)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[12]: 'RGGB' (8-bit Bayer RGRG/GBGB)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[13]: 'GRBG' (8-bit Bayer GRGR/BGBG)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[14]: 'GBRG' (8-bit Bayer GBGB/RGRG)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[15]: 'BA81' (8-bit Bayer BGBG/GRGR)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[16]: 'RG10' (10-bit Bayer RGRG/GBGB)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[17]: 'BA10' (10-bit Bayer GRGR/BGBG)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[18]: 'GB10' (10-bit Bayer GBGB/RGRG)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[19]: 'BG10' (10-bit Bayer BGBG/GRGR)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[20]: 'RG12' (12-bit Bayer RGRG/GBGB)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[21]: 'BA12' (12-bit Bayer GRGR/BGBG)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[22]: 'GB12' (12-bit Bayer GBGB/RGRG)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[23]: 'BG12' (12-bit Bayer BGBG/GRGR)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[24]: 'BYR2' (16-bit Bayer BGBG/GRGR)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[25]: 'GB16' (16-bit Bayer GBGB/RGRG)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[26]: 'GR16' (16-bit Bayer GRGR/BGBG)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[27]: 'RG16' (16-bit Bayer RGRG/GBGB)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[28]: 'Y16 ' (16-bit Greyscale)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[29]: 'GREY' (8-bit Greyscale)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[30]: 'EBD8' (Embedded data 8-bit)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[31]: 'SPD6' (Shield pix data 16-bit)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[32]: 'Y12 ' (12-bit Greyscale)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
[33]: 'Y10 ' (10-bit Greyscale)
Size: Stepwise 64x64 - 1920x1080 with step 8/8
root@firefly:/# ls /dev/video* -l
ls /dev/video* -l
crw-rw----+ 1 root video 81, 0 Mar 2 07:47 /dev/video0
crw-rw----+ 1 root video 81, 1 Mar 2 07:47 /dev/video1
crw-rw----+ 1 root video 81, 10 Mar 2 07:47 /dev/video10
crw-rw----+ 1 root video 81, 2 Mar 2 07:47 /dev/video2
crw-rw----+ 1 root video 81, 3 Mar 2 07:47 /dev/video3
crw-rw----+ 1 root video 81, 4 Mar 2 07:47 /dev/video4
crw-rw----+ 1 root video 81, 5 Mar 2 07:47 /dev/video5
crw-rw----+ 1 root video 81, 6 Mar 2 07:47 /dev/video6
crw-rw----+ 1 root video 81, 7 Mar 2 07:47 /dev/video7
crw-rw----+ 1 root video 81, 8 Mar 2 07:47 /dev/video8
crw-rw----+ 1 root video 81, 9 Mar 2 07:47 /dev/video9
-rw-rw---- 1 root video 4 Mar 2 07:47 /dev/video-dec0
-rw-rw---- 1 root video 4 Mar 2 07:47 /dev/video-enc0
root@firefly:/#
4.4 查看拓扑 media-ctl -d /dev/media0 -p
root@linaro-alip:/rockchip-test# media-ctl -d /dev/media0 -p
Media controller API version 5.10.110
Media device information
------------------------
driver rkcif
model rkcif-mipi-lvds2
serial
bus info
hw revision 0x0
driver version 5.10.110
Device topology
- entity 1: stream_cif_mipi_id0 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video0
pad0: Sink
<- "rockchip-mipi-csi2":1 [ENABLED]
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 5: stream_cif_mipi_id1 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video1
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 [ENABLED]
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 9: stream_cif_mipi_id2 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video2
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 [ENABLED]
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 13: stream_cif_mipi_id3 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video3
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 [ENABLED]
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 17: rkcif_scale_ch0 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video4
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 [ENABLED]
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 21: rkcif_scale_ch1 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video5
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 [ENABLED]
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 25: rkcif_scale_ch2 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video6
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 [ENABLED]
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 29: rkcif_scale_ch3 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video7
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 [ENABLED]
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 33: rkcif_tools_id0 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video8
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 [ENABLED]
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 37: rkcif_tools_id1 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video9
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 [ENABLED]
<- "rockchip-mipi-csi2":11 []
- entity 41: rkcif_tools_id2 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video10
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 [ENABLED]
- entity 45: rockchip-mipi-csi2 (12 pads, 122 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SGBRG10_1X10/3864x2192 field:none
crop.bounds:(12,16)/3840x2160
crop:(12,16)/3840x2160]
<- "rockchip-csi2-dphy0":1 [ENABLED]
pad1: Source
-> "stream_cif_mipi_id0":0 [ENABLED]
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad2: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 [ENABLED]
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad3: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 [ENABLED]
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad4: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 [ENABLED]
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad5: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 [ENABLED]
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad6: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 [ENABLED]
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad7: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 [ENABLED]
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad8: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 [ENABLED]
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad9: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 [ENABLED]
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad10: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 [ENABLED]
-> "rkcif_tools_id2":0 []
pad11: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 [ENABLED]
- entity 58: rockchip-csi2-dphy0 (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev1
pad0: Sink
[fmt:SGBRG10_1X10/3864x2192@10000/300000 field:none
crop.bounds:(12,16)/3840x2160]
<- "m00_b_imx415 3-001a":0 [ENABLED]
pad1: Source
-> "rockchip-mipi-csi2":0 [ENABLED]
- entity 63: m00_b_imx415 3-001a (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev2
pad0: Source
[fmt:SGBRG10_1X10/3864x2192@10000/300000 field:none
crop.bounds:(12,16)/3840x2160]
-> "rockchip-csi2-dphy0":0 [ENABLED]
五、测试
v4l2-ctl -d /dev/video0 --set-fmt-video=width=1920,height=1080,pixelformat=BG10 \--stream-mmap=3 \--stream-skip=3 \--stream-to=/tmp/cif888.out \--stream-count=1 \--stream-poll
root@firefly:/# v4l2-ctl -d /dev/video0 --set-fmt-video=width=1920,height=1080,pixelformat=BG10 \--stream-mmap=3 \--stream-skip=3 \--stream-to=/tmp/cif888.out \--stream-count=1 \--stream-poll
<to=/tmp/cif888.out \--stream-count=1 \--stream-poll
<<<<
root@firefly:/# ls
ls
bin proc usr
boot root usr.bin.evince
dev root-ro usr.bin.man
etc run usr.lib.libreoffice.program.oosplash
home sbin usr.lib.libreoffice.program.senddoc
lib sbin.dhclient usr.lib.libreoffice.program.soffice.bin
lost+found snap usr.lib.libreoffice.program.xpdfimport
lsb_release srv usr.lib.snapd.snap-confine.real
media sys usr.sbin.cupsd
mnt system var
nvidia_modprobe tmp vendor
opt userdata
root@firefly:/# c tmp
c tmp
c: command not found
root@firefly:/# cd tmp
cd tmp
root@firefly:/tmp# ls
ls
cif888.out
config-err-RXhMdN
snap-private-tmp
ssh-PWGyUdXTlJXO
systemd-private-fd2eac9786b54e498e5de0345b10e142-colord.service-B2bFDi
systemd-private-fd2eac9786b54e498e5de0345b10e142-ModemManager.service-pv2qXf
systemd-private-fd2eac9786b54e498e5de0345b10e142-systemd-logind.service-OMr8oi
systemd-private-fd2eac9786b54e498e5de0345b10e142-systemd-resolved.service-Nj58Ih
systemd-private-fd2eac9786b54e498e5de0345b10e142-systemd-timesyncd.service-P1vtdj
systemd-private-fd2eac9786b54e498e5de0345b10e142-upower.service-4NGM0g
tracker-extract-files.1000
root@firefly:/tmp# ls -l
ls -l
total 2736
-rw-rw-rw- 1 root root 2764800 Mar 2 07:48 cif888.out
-rw------- 1 firefly firefly 0 Mar 2 07:47 config-err-RXhMdN
drwx------ 2 root root 4096 Mar 2 07:47 snap-private-tmp
drwx------ 2 firefly firefly 4096 Mar 2 07:47 ssh-PWGyUdXTlJXO
drwx------ 3 root root 4096 Mar 2 07:47 systemd-private-fd2eac9786b54e498e5de0345b10e142-colord.service-B2bFDi
drwx------ 3 root root 4096 Mar 2 07:47 systemd-private-fd2eac9786b54e498e5de0345b10e142-ModemManager.service-pv2qXf
drwx------ 3 root root 4096 Mar 2 07:47 systemd-private-fd2eac9786b54e498e5de0345b10e142-systemd-logind.service-OMr8oi
drwx------ 3 root root 4096 Mar 2 07:47 systemd-private-fd2eac9786b54e498e5de0345b10e142-systemd-resolved.service-Nj58Ih
drwx------ 3 root root 4096 Mar 2 07:47 systemd-private-fd2eac9786b54e498e5de0345b10e142-systemd-timesyncd.service-P1vtdj
drwx------ 3 root root 4096 Mar 2 07:47 systemd-private-fd2eac9786b54e498e5de0345b10e142-upower.service-4NGM0g
drwx------ 2 firefly firefly 4096 Mar 2 07:47 tracker-extract-files.1000
抓图正常。
相关文章:

RK3588S imx415摄像头调试
一、环境 soc:rk3588sensor:imx415board: AIO-3588SJDlinux:rk3588_linux_release_20230301_v1.0.6e 二、imx415简介 品牌:SONY型号:IMX415接口:MIPI CSI 三、驱动移植 瑞芯微支持的摄像头,有…...

「SAP ABAP」OPEN SQL(七)【GROUP BY | HAVING | ORDER BY】
💂作者简介: THUNDER王,一名热爱财税和SAP ABAP编程以及热爱分享的博主。目前于江西师范大学本科在读,同时任汉硕云(广东)科技有限公司ABAP开发顾问。在学习工作中,我通常使用偏后端的开发语言A…...

容器-LinkedList
LinkedList LinkedList的概述 LinkedList的底层使用双向链表实现。 链表是一种线性数据结构,其中每个元素都是一个单独的对象,包含一个指向列表中下一个节点的引用。 它可以用于实现各种抽象数据类型,例如列表、堆栈、队列等。 LinkedLis…...

Flask 路由和视图函数
Flask 路由和视图函数一、路由 (Routing)二、视图函数 (View Functions)三、动态路由四、HTTP方法五、总结在Flask中,路由和视图函数是两个核心概念,它们协同工作以处理用户请求并生成响应。一、路由 (Routing) 路由是URL到Python函数的映射。当用户访问…...

Linux主机 SSH 通过密钥登录
我们一般使用 PuTTY 等 SSH 客户端来远程管理 Linux 服务器。但是,一般的密码方式登录,容易有密码被暴力破解的问题。所以,一般我们会将 SSH 的端口设置为默认的 22 以外的端口,或者禁用 root 账户登录。其实,有一个更…...

中国信息安全测评中心-自主原创测评
信息技术产品自主原创测评是适应我国经济社会发展的需要,是适应国际知识产权保护的发展趋势,鼓励信息技术产业的自主创新和维护权利人合法权益的重要举措。 信息技术产品自主原创测评业务是指在开发者自主声明的基础上,通过对关键技术实现的全…...

redis杂谈之部分重同步的实现
背景: 部分重同步则用于处理断线后重复制情况:当从服务器在断线 后重新连接主服务器时,如果条件允许,主服务器可以将主从服务器连 接断开期间执行的写命令发送给从服务器,从服务器只要接收并执行这 些写命令ÿ…...

多态部分参考答案
一、选择题 1、下列关于动态联编的描述中,错误的是()。 A.动态联编是以虚函数为基础 B.动态联编是运行时确定所调用的函数代码的 C.动态联编调用函数操作是指向对象的指针或对象引用 D.动态联编…...

【高项】项目人力资源管理,沟通管理与干系人管理(十大管理)
【高项】项目人力资源管理,沟通管理与干系人管理(十大管理) 文章目录1、人力资源管理1.1 什么是人力资源管理?1.2 如何进行人力资源管理?(过程)1.3 人力资源管理工具1.4 人力资源管理文件2、沟通…...

Wikijs简介-强大可扩展的开源维基软件
Wikijs - 最强大 最可扩展的开源维基软件 使用 wiki.js 美丽直观的界面,让文档成为写作的乐趣! 优点 🔧 随时随地安装 几乎适用于任何平台,并与PostgreSQL、MySQL、MariaDB、MS SQL Server 或 SQLite 兼容! ⚙️ 管…...
)
微博舆情分析系统的设计与实现(python)
背景分析 随着互联网大趋势的到来,社会的方方面面,各行各业都在考虑利用互联网作为媒介将自己的信息更及时有效地推广出去,而其中最好的方式就是建立网络管理系统,并对其进行信息管理。由于现在网络的发达,微博舆情分析系统的资讯信息通过网络进行信息管理掀起了热潮,所…...

【AUTOSAR】【Lin通信】LinTrcv
目录 一、概述 二、功能说明 2.1 LIN收发器驱动程序操作模式 2.2 LIN收发器硬件操作模式 2.3 LIN收发器唤醒类型 2.4 LIN收发器唤醒模式 2.5 错误分类 2.5.1 开发错误 三、API接口 3.1 API定义 一、概述 该规范规定了模块LIN收发器驱动程序的功能、API和配置。它负责…...
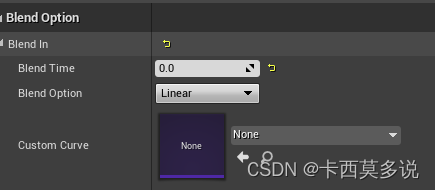
UE4C++学习篇(十九)-- 动画蒙太奇初级使用
用一个第三人称的射击案例来简单介绍一下动画蒙太奇的使用,动画蒙太奇的具体介绍这里就不多说了,不知道的小伙伴可以去搜一下了解。 这里介绍角色射击,射击的时候播放一个射击动画。 选中需要创建出动画蒙太奇的动画,点击创建&am…...

子集和问题
目录 子集和问题 程序设计 程序分析 子集和问题 【问题描述】子集和问题的一个实例为〈S,c〉。其中,S={ x1 , x2 ,…,xn }是一个正整数的集合,c是一个正整数。子集和问题判定是否存在S的一个子集S1,使得: 试设计一个解子集和问题的回溯法。 对于给定的正整数的集…...

苹果蓝牙耳机太贵了买哪个替代?苹果蓝牙耳机平替推荐
随着人们生活水平的提高,蓝牙耳机已经遍布在我们生活的各个角落。同时随着科技的发展,许多人果粉选择苹果耳机平替。下面我们一起来看看2023年有哪些适用于苹果的平替蓝牙耳机吧! 一、南卡小音舱Lite2蓝牙耳机 蓝牙版本:5.3 售…...

CK-UR05-US桌面式超高频RFID发卡器开发手册之USB控制命令格式
CK-UR05-US桌面式超高频RFID发卡器支持USB控制命令格式,本文重点就此格式展开说明! CK-UR05-US桌面式超高频RFID发卡器1、取版本号(GetReaderVersion) 功能:取读写器的硬件、软件版本 命令码: 02H 命令参数:无 命令包: 『40H 02H 02H BCH』 举例: 如…...
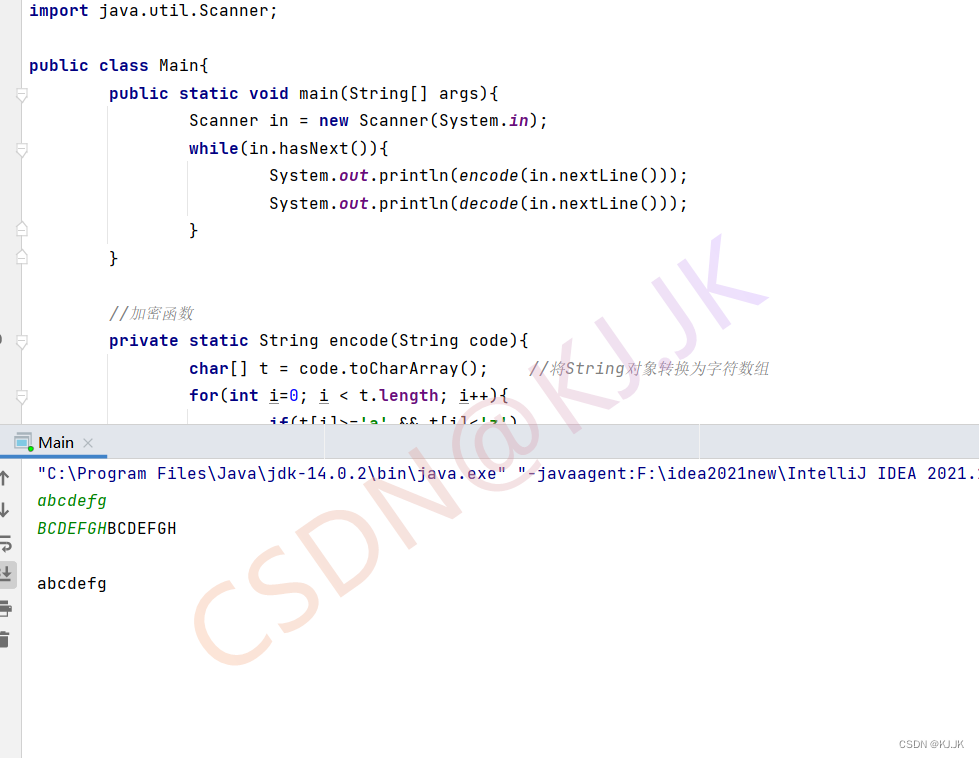
【华为OD机试】1025 - 字符串加解密
文章目录一、题目🔸题目描述🔸输入输出🔸样例1二、代码参考作者:KJ.JK🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 &#x…...
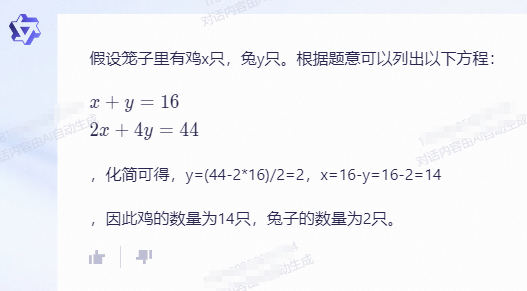
阿里云版GPT官宣,我们问了它10个问题
4月7日,阿里云宣布自研大模型“通义千问”,目前已开始邀请用户测试体验。 阿里达摩院在NLP自然语言处理等前沿科研领域早已布局多年,并于2019年启动大模型研发,通义千问便是其最新成果,相当于阿里云版的“ChatGPT”。 …...

ORM框架之NHibernate
什么是NHibernate NHibernate是一个开源的对象关系映射(ORM)框架,它允许开发人员使用面向对象的方式来访问关系型数据库。它是Hibernate框架的C#版本,Hibernate框架是Java平台上的ORM框架。 使用NHibernate,您可以将…...

凑微分练习
前言 在学习第一类换元法(凑微分法)时,我们常常需要凑微分。为了更加熟练地运用凑微分法,下面有几道凑微分例题供大家练习。 记住df(x)f′(x)dxdf(x)f(x)dxdf(x)f′(x)dx 例题1 dx‾d(ax)dx\underline{\quad}d(ax)dxd(ax)dx‾…...

3分钟掌握:163MusicLyrics终极免费歌词解决方案全攻略
3分钟掌握:163MusicLyrics终极免费歌词解决方案全攻略 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 想要快速获取网易云音乐和QQ音乐的歌词吗?1…...

DownKyi完全指南:三步解锁B站8K视频下载的终极方案
DownKyi完全指南:三步解锁B站8K视频下载的终极方案 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等ÿ…...

Swagger2Word终极指南:3种方法实现API文档自动化转换
Swagger2Word终极指南:3种方法实现API文档自动化转换 【免费下载链接】swagger2word 项目地址: https://gitcode.com/gh_mirrors/swa/swagger2word 还在为手动编写API文档而烦恼吗?Swagger2Word为你提供了一站式自动化解决方案,将Swa…...

恶劣环境下LED发光服饰的可靠系统构建:从设计到工艺的工程实践
1. 项目概述与核心挑战如果你曾经尝试过制作一件会发光的服装,无论是为了音乐节、万圣节还是水下表演,你大概都体会过那种“亮一次,修三次”的挫败感。LED灯带在工作室的桌面上测试时完美无瑕,一旦穿到身上,开始活动、…...

All in Token,三个运营商建Token工厂,中国移动跟进Token经营 三大运营商争夺AI阵地
随着Token(词元)经营战略的密集落地,三大运营商在AI领域的竞争愈发激烈。在日前举行的2026移动云大会上,中国移动正式发布了Token运营生态体系与移动模型服务平台MoMA,宣布接入超300款模型,并通过Token集约…...

开源技能库构建指南:Git+Markdown+Docsify打造个人技术知识体系
1. 项目概述:一个开源技能库的诞生与价值在技术领域,尤其是软件开发、运维和数据分析等方向,我们每天都在与海量的工具、框架和命令打交道。时间一长,一个很现实的问题就摆在了面前:那些曾经花了好几个小时才调通的复杂…...

手机号归属地查询系统:3步构建可视化定位工具
手机号归属地查询系统:3步构建可视化定位工具 【免费下载链接】location-to-phone-number This a project to search a location of a specified phone number, and locate the map to the phone number location. 项目地址: https://gitcode.com/gh_mirrors/lo/l…...

零基础实操:小龙虾 AI OpenClaw 接入 Kimi 详细步骤
前置准备 获取小龙虾open claw一键安装包(www.totom.top)并安装电脑端已成功安装并正常运行OpenClaw客户端,顶部 Gateway 状态保持在线设备网络通畅,可正常访问 Kimi 开放平台拥有可正常登录的 Kimi 月之暗面 Moonshot 账号账号提…...

Windows Android子系统深度优化:WSABuilds项目架构解析与实战部署指南
Windows Android子系统深度优化:WSABuilds项目架构解析与实战部署指南 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/or Magisk or Ker…...

别再让某个用户占满硬盘了!手把手教你用Linux quota给CentOS 7/8的/home目录设置磁盘限额
别再让某个用户占满硬盘了!手把手教你用Linux quota给CentOS 7/8的/home目录设置磁盘限额 想象一下这样的场景:你管理的服务器上,十几个开发人员共享着同一个存储空间。某天突然收到警报——磁盘空间不足!调查后发现,一…...