【ROS】基于WIFI网络实现图像消息跨机实时传输
【开发背景】
研究机器人目标检测算法的时候,常常需要把推理图像实时展示出来,以供观摩。而ROS1提供的跨机通信方法,要么是配置单Master,要么是配置多Master;一方面配置麻烦,另一方面传输效率低下,特别是在无线网络环境下,那叫一个鸡肋,仿佛我只需要喝一杯水,他却把整个太平洋给我搬来了一样。忍无可忍之下,萌生了自己动手开发一个图像消息传输中间件的冲动!于是乎,“ image_zmqpp ” —— 应运而生了!
【软件支持】
Ubuntu14.04 + ROS Indigo
Ubuntu16.04 + ROS Kinetic
Ubuntu18.04 + ROS Melodic
Ubuntu20.04 + ROS Noetic
【硬件支持】
X86架构
ARM架构
【依赖安装】
如果你的平台能够联网,那么只需要运行一句话即可:
sudo apt-get install libzmq3-dev如果你的平台和我一样,处于不那么方便联网的情况 ,那也不用担心,只需要照着下面做即可:
1、把我提供的功能包下载下来,解压到任意一个ROS工作空间
2、找到 zmq_sup/third_party 路径下的 libzmq.tar.gz 压缩包,并解压
3、在该目录下打开一个终端,运行下面指令
mkdir build
cd build
cmake -DCMAKE_INSTALL_PREFIX=/usr ..
sudo make install4、然后便可以回到工作空间下进行 catkin_make 啦
【使用方法】
比如,你有三个机器人A、B、C,以及一台上位机,
- 上位机这边需要运行
roslaunch image_zmqpp image_zmq_sub.launch其中 launch 文件中的机器人个数以及IP地址等参数需要你根据实际情况做出修改
<?xml version="1.0"?>
<launch><node pkg="image_zmqpp" type="image_zmqpp_sub" respawn="false" name="zmq_sub" output="screen"><param name="ip_num" value="3"/><param name="ip_addr_1" value="tcp://192.168.30.26:5555"/><param name="ip_addr_2" value="tcp://192.168.1.54:5555"/><param name="ip_addr_3" value="tcp://192.168.1.55:5555"/><param name="image_topic" value="img_zmq"/></node>
</launch>- 机器人A、B、C上分别运行
roslaunch image_zmqpp image_zmq_pub.launch这个launch文件中的IP地址也是要根据实际情况修改的
比如机器人A
<?xml version="1.0"?>
<launch><node pkg="image_zmqpp" type="image_zmqpp_pub" respawn="false" name="zmq_pub" output="screen"><param name="ip_addr" value="tcp://192.168.30.26:5555"/><param name="image_topic" value="img_zmq"/></node>
</launch>机器人B
<?xml version="1.0"?>
<launch><node pkg="image_zmqpp" type="image_zmqpp_pub" respawn="false" name="zmq_pub" output="screen"><param name="ip_addr" value="tcp://192.168.1.54:5555"/><param name="image_topic" value="img_zmq"/></node>
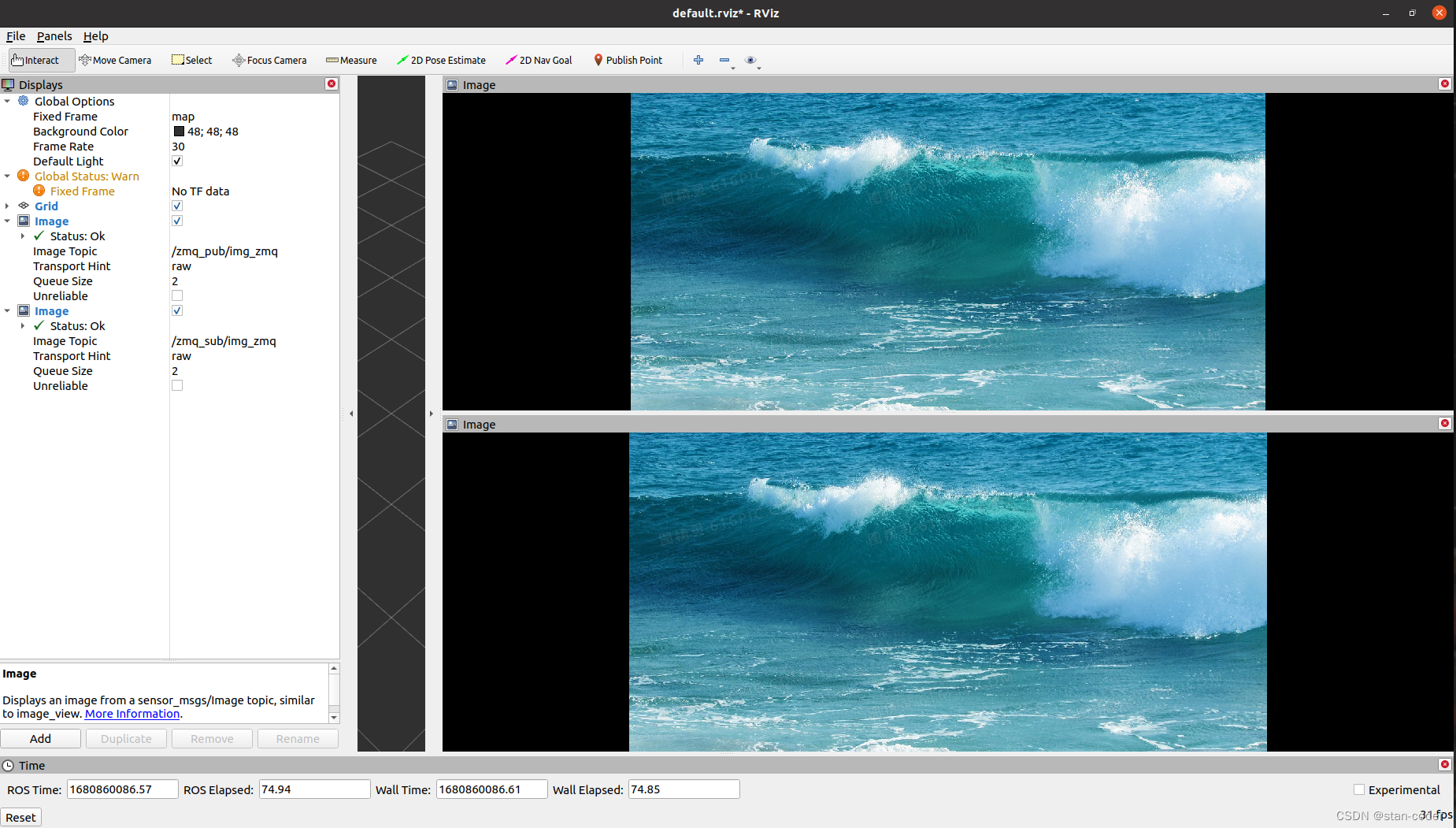
</launch>这样,你只需要把图像话题改成需要传输的话题,即可非常简单完成跨机WIFI图传!
【效果一展】
【福利来了】
私信我,拿源码!!
相关文章:
【ROS】基于WIFI网络实现图像消息跨机实时传输
【开发背景】 研究机器人目标检测算法的时候,常常需要把推理图像实时展示出来,以供观摩。而ROS1提供的跨机通信方法,要么是配置单Master,要么是配置多Master;一方面配置麻烦,另一方面传输效率低下…...

一次性说清楚 JAVA的 ThreadPoolExecutor 、newFixedThreadPool 和newCachedThreadPool 等
目录 1、Executors.newCachedThreadPool() 与 Executors.newFixedThreadPool(n) 的区别是什么? 2、Executors.newCachedThreadPool() 与 Executors.newFixedThreadPool(n) 可以调参吗,比如线程大小,线程等待时间 等等 3、newCachedThreadP…...
Android双目三维重建:Android双目摄像头实现双目测距
Android双目三维重建:Android双目摄像头实现双目测距 目录 Android双目三维重建:Android双目摄像头实现双目测距 1.开发版本 2.Android双目摄像头 3.双目相机标定 (1)双目相机标定-Python版 (2)双目相机标定-Matlab版 4.相机参数配置 5.Android 双…...

解决Avoid using non-primitive value as key, use string/number value instead.
Avoid using non-primitive value as key, use string/number value instead. 意思是:避免使用非基本值作为键,而是使用字符串/数字值。 Duplicate keys detected: [object Object]. This may cause an update error. 意思是:检测到重复键:[o…...
重构·改善既有代码的设计.03之重构手法(上)
1. 前言 之前的重构系列中,介绍了书中提到的重构基础,以及识别代码的坏味道。今天继续第三更,讲述那些重构手法(上)。看看哪些手法对你的项目能有所帮助… 2. 重新组织函数 对函数进行整理,使之更恰当的…...
闭关修炼(0.0 pytorch基础学习)1
基于官网pytorch.org pytorch 动态 比较优秀 py3.7支持是最多的啦 原来anaconda 是蟒蛇的意思 细思极恐 python 是蛇 yi Introduction to PyTorch Tensors — PyTorch Tutorials 2.0.0cu117 documentation omygaga 英语极差 哈哈哈 tensor 多维数组 矩阵二维数组 Tensor…...

个人-计算机操作系统第一章
一、章节习题 1.操作系统的目标与应用环境有关,如分时系统,希望能提供良好的()能力。 A、批处理B、可靠性C、稳定性D、人-机交互 2.()是应用程序取得OS所有服务的唯一途径。 A、系统调用B、作业调度C、键…...

Python-责任链模式
介绍 责任链模式是一种行为型设计模式,它允许多个对象以链式的形式依次处理请求,直到请求被处理或者无处理对象为止 实现方式 责任链模式由多个处理器组成,每个处理器都可以处理一种请求。如果当前处理器无法处理请求,它将把请…...
HIT 计统实验2 二进制炸弹(gdb破解版) 拆弹过程
CSAPP 实验2是一个很好玩的实验,网上有很多参考资源写的都很好,本文增加了一些具体细节。 想要我的炸弹可以私信我。 还得看形式语言 , 炸弹6 7 有时间再拆 第1章 实验基本信息 1.1 实验目的 熟练掌握计算机系统的ISA指令系统与寻址方式熟练掌握Linu…...
echart 半环渐变仪表盘
实现效果如图: op配置项代码: let Chart this.$echarts.init(document.getElementById(dashboard-1));let option {// backgroundColor: #040d2e,series: [// 中间灰色轴线{type: gauge,radius: 150%, // 位置center: [50%, 90%],startAngle: 180,end…...
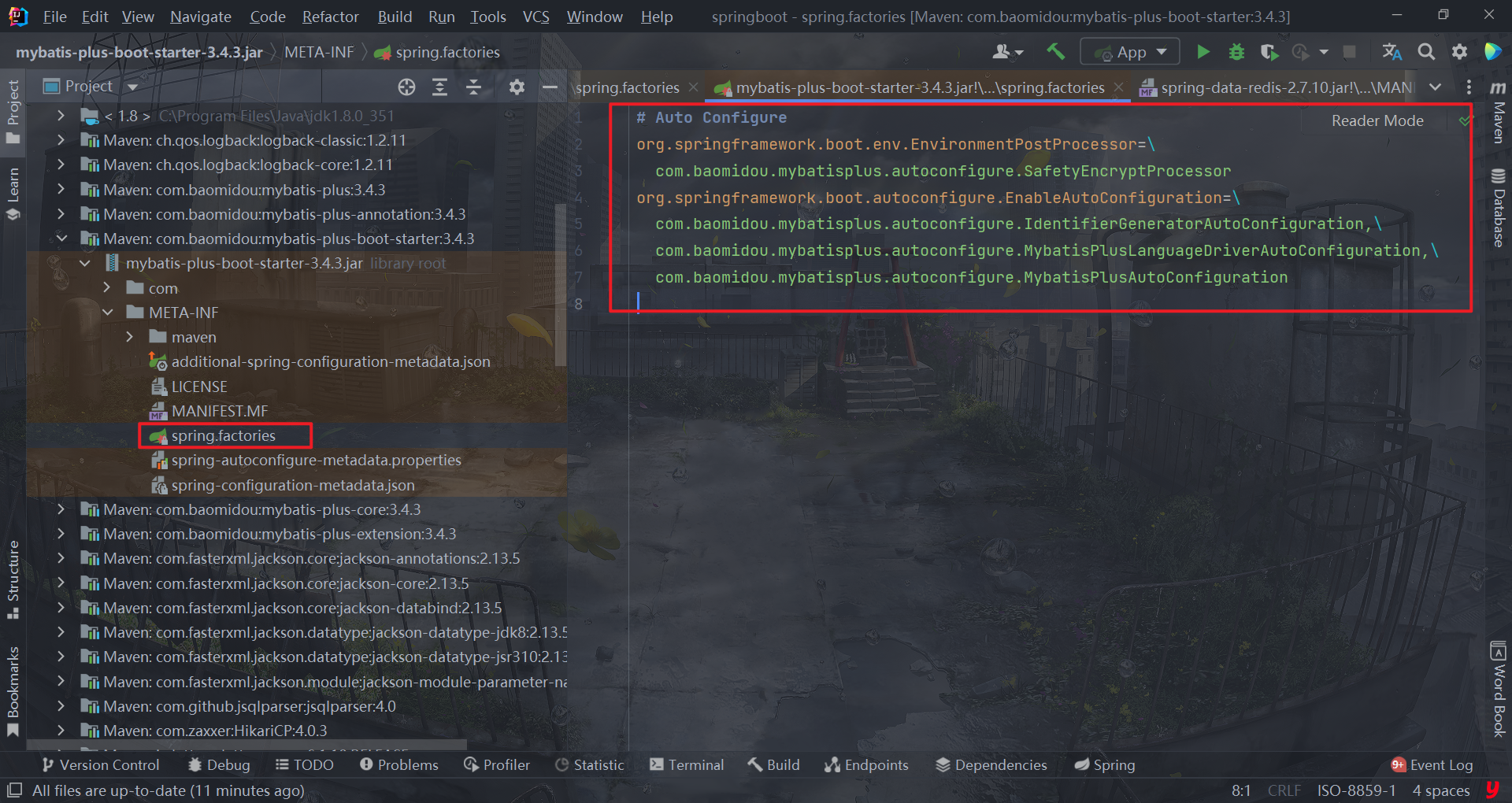
【springboot】自动加载分析
文章目录问题SpringBootApplication注解AutoConfigurationPackages.Registrar类AutoConfigurationImportSelector类springboot如何加载其他的starter总结问题 为什么我们在使用springboot的时候,只需要在maven中导入starter就能够使用呢?这里来分析一下…...

ChatGPT批量翻译-ChatGPT批量生成多国语言
ChatGPT翻译的准吗 ChatGPT是一种基于Transformer架构的自然语言处理技术,其翻译准确性取决于所训练的模型和数据集的质量。在特定的语料库和训练数据下,ChatGPT可以实现一定程度的准确翻译。但是,与人工翻译相比,ChatGPT的翻译质…...
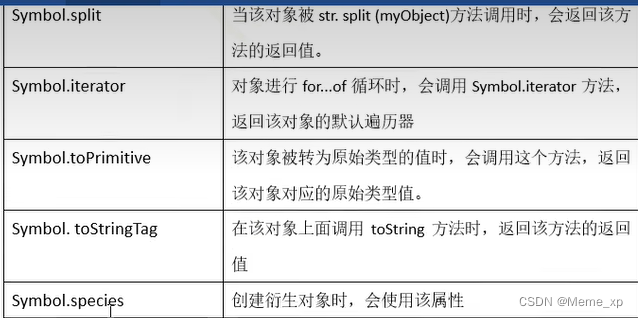
Symble
ES6引入了一种新的原始数据类型 Symbol,表示独一无二的值。它是JavaScript语言的第七种数据类型,是一种类似于字符串的数据类型。 Symbol特点 Symbol 的值是唯一的,用来解决命名冲突的问题 Symbol值不能与其他数据进行运算 Symbol定义的对…...

能在家里赚钱的工作有哪些?适合普通人的兼职项目
当下对于普通人而言,想在社会上找到一份舒心安逸的工作很难,特别是在薪酬待遇这方面,更是低得让人心寒。那么,如果能有一份在家就可以做的事情,而且是收入也不少,那将是很多普通人的最佳选择。在这里&#…...

创建SaaS产品帮助中心的关键步骤
帮助中心是一款SaaS产品必不可少的一部分,为了帮助用户更好的解决产品相关问题,提高新用户的使用体验,并且引导用户更好的使用产品,那么应该怎样制作帮助中心呢,每个产品帮助中心都需要有自己的风格,根据产…...
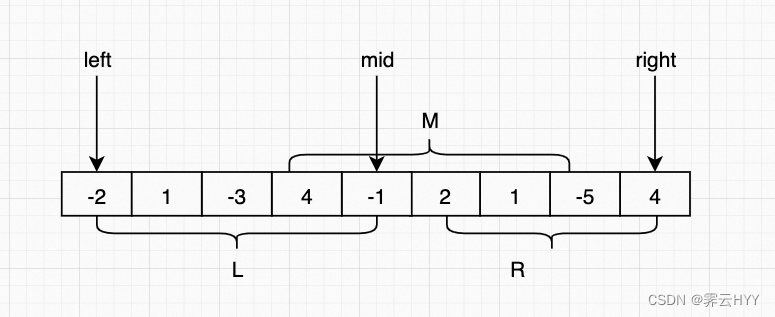
高频算法:Leetcode53 最大子数组和
今天讲的是Leetcode第53题,最大子数组和 首先观察题目,题目需要我们找出具有最大和的连续子数组,直接拿题目中的示例来做一个演示,找一找什么规律下的连续子数组才能得到最大的和 先从-2开始,-2 1 -1 此时我们的和…...
如何编写接口自动化测试框架、
编写接口自动化测试框架需要注意以下几点: 接口选择:首先确定需要测试的接口,包括请求方式、URL、参数、返回值等信息。 框架设计:设计一个灵活的框架,可以根据接口类型(RESTful API、SOAP API等ÿ…...

【Java面试八股文宝典之RabbitMQ篇】备战2023 查缺补漏 你越早准备 越早成功!!!——Day17
大家好,我是陶然同学,软件工程大三即将实习。认识我的朋友们知道,我是科班出身,学的还行,但是对面试掌握不够,所以我将用这100多天更新Java面试题🙃🙃。 不敢苟同,相信大…...
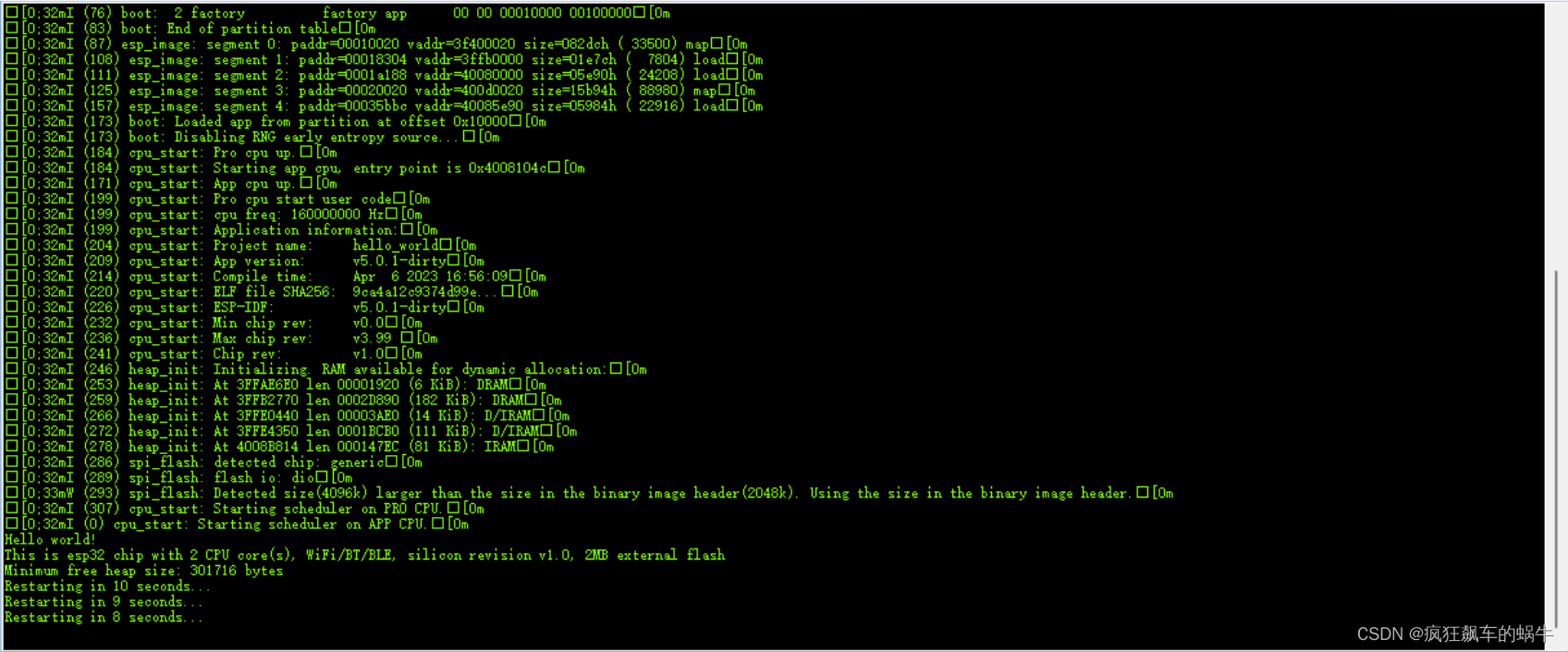
ESP32开发(1)----Espressif-IDE开发环境配置
Espressif-IDE开发环境配置前言一、ESP32-WROOM-32介绍二、IDE环境搭建三、建立第一个项目总结前言 最近得到一块ESP32-WROOM-32的开发板,没有原理图,但板子走线比较简单,看着板子上的布线大致猜一猜连接,然后试玩了一下…...
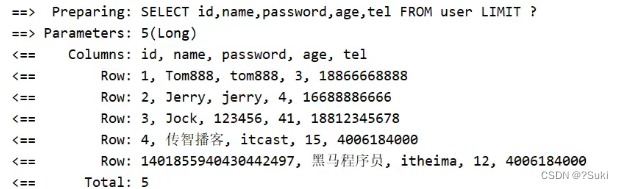
MyBatisPlus标准数据层开发
MyBatisPlus标准数据层开发2,标准数据层开发2.1 标准CRUD使用2.2 新增2.3 删除2.4 修改2.5 根据ID查询2.6 查询所有2.7 Lombok概念使用步骤步骤1:添加lombok依赖步骤2:安装Lombok的插件步骤3:模型类上添加注解2.8 分页功能步骤1:调用方法传入参数获取返回值步骤2:设…...

基于Python的汽车租赁管理系统毕设
博主介绍:✌ 专注于Java,python,✌关注✌私信我✌具体的问题,我会尽力帮助你。一、研究目的本研究旨在开发一套基于Python的汽车租赁管理系统,以实现汽车租赁业务的自动化、高效化和智能化。具体而言,研究目的可从以下几个方面进行…...
)
STM32F407的RTC时钟不准?手把手教你用CubeMX配置LSE晶振校准(附源码)
STM32F407的RTC时钟不准?手把手教你用CubeMX配置LSE晶振校准(附源码) 在嵌入式系统开发中,实时时钟(RTC)的精度问题常常让开发者头疼。特别是使用STM32F407这类主流单片机时,即使按照官方文档配…...

Performance-Fish:环世界性能优化的全方位解决方案
Performance-Fish:环世界性能优化的全方位解决方案 【免费下载链接】Performance-Fish Performance Mod for RimWorld 项目地址: https://gitcode.com/gh_mirrors/pe/Performance-Fish 问题诊断:环世界性能瓶颈深度剖析 🔍 AI决策系统…...

企业开始用 AI 后,最容易被忽略的其实是这件事!
这两年,越来越多企业开始尝试把 AI 用到日常办公中。从写邮件、整理纪要,到查询知识库、生成文档,AI 正在从个人工具变成企业工作的一部分。但很多企业在推进 AI 时,首先关注的往往是功能和效率,比如“能不能写”“能不…...

万象视界灵坛实战教程:广告Banner图受众情绪倾向语义解析实践
万象视界灵坛实战教程:广告Banner图受众情绪倾向语义解析实践 1. 平台介绍与核心能力 万象视界灵坛是一款基于OpenAI CLIP技术的高级多模态智能感知平台。它将复杂的图像语义分析过程转化为直观的交互体验,特别适合需要快速理解视觉内容情感倾向的营销…...

ROS2编译报错CMake未找到diagnostic_updater:从诊断工具缺失到精准安装
1. 当CMake告诉你找不到diagnostic_updater时发生了什么 第一次看到这个报错的时候,我也是一头雾水。明明代码是从GitHub上clone下来的标准功能包,怎么一编译就报错呢?那个红色的"CMake Error"特别扎眼,就像开车时突然亮…...

基于Vue的川汇水产养殖管理系统[vue]-计算机毕业设计源码+LW文档
摘要:随着水产养殖业的快速发展,传统的管理方式已难以满足现代化水产养殖的需求。本文介绍了一款基于Vue框架开发的川汇水产养殖管理系统,该系统旨在提高水产养殖管理的效率和精准度。系统涵盖了系统用户管理、水质管理、药品管理、设备管理、…...

手把手教你用Python计算斯皮尔曼相关系数:从手动推导到scipy一键调用
深入掌握Python中的斯皮尔曼相关系数:从数学原理到实战应用 在数据分析领域,理解变量之间的关系是至关重要的。斯皮尔曼相关系数作为一种非参数统计量,能够揭示数据间的单调关联,而不仅仅是线性关系。本文将带你从基础概念出发&am…...

Nano Banana Images API 集成指南
本文将介绍如何集成和使用 Nano Banana Images API。这一接口支持两种功能:图像生成 (generate) 和 图像编辑 (edit)。无论是创建独特的艺术作品,还是对现有图像进行修改,Nano Banana 都能满足您的需求。 环境准备 在使用该 API 之前&#…...

2024年技术趋势:AI、云计算与区块链的颠覆性变革
技术趋势预测文章大纲引言简要介绍技术趋势预测的重要性,提及CSDN作为技术社区的影响力,说明本文将基于当前技术发展分析未来趋势。人工智能与机器学习讨论生成式AI(如GPT-4、Stable Diffusion)的演进方向,包括多模态模…...