使用红黑树模拟实现map和set
在STL的源代码中,map和set的底层原理都是红黑树。但这颗红黑树跟我们单独写的红黑树不一样,它需要改造一下:
改造红黑树
节点的定义
因为map和set的底层都是红黑树。而且map是拥有键值对pair<K,V>的,而set是没有键值对,只有一个K。因此,为了应对这两种不同的情况,就使用模板参数T。
当map使用这棵红黑树的时候,T就会变成pair<K,V>。当set使用时,T就会变成K。
//使用枚举
enum Colour
{RED,BLACK,
};// 如果是map,则为pair<K, V>; 如果是set,则为k
//因此,对于节点来说,需要再套一层模板,来应付两种不同的情况
template<class T>
struct RBTreeNode
{T _data;RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;Colour _col;RBTreeNode(const T& data):_data(data), _left(nullptr), _right(nullptr), _parent(nullptr), _col(RED) //默认是红色{}
};改版的红黑树的插入操作
红黑树的模板参数有三个:K、valueType和仿函数KeyOfValue。
K是key的类型,ValueTyp要么是set的K,要么是map的pair<const K,V>。
而仿函数是为了比较节点的值的大小的,因为官方库中键值对pair<K,V>比较大小的方法是比较first和second。但是红黑树中,新增节点是通过比较first,因此我们需要自己写一个仿函数用于单独比较first。
//跟节点的定义一样
//因为关联式容器中存储的是<key, value>的键值对,因此
// k为key的类型,
// ValueType: 如果是map,则为pair<K, V>; 如果是set,则为k。如下:
// map->RBTree<K,pair<const K,V>,MapKeyOfT> _t;
// set->RBTree<K,K,SetKeyOfT> _t
//
// KeyOfValue: 通过value来获取key的一个仿函数类。其作用就是用于比较。
template<class K,class ValueType,class KeyOfValue>
class RBTree
{typedef RBTreeNode<ValueType> Node;
public: //迭代器typedef __RBTreeIterator<ValueType> iterator;//......
private:Node* _root = nullptr;
};
迭代器
红黑树的迭代器不能使用原生指针,因为它是一棵树,节点地址不连续,因此需要封装起来。
//set的K,map的pair<K,V>
template<class ValueType>
struct __RBTreeIterator
{typedef RBTreeNode<ValueType> Node;typedef __RBTreeIterator<ValueType> Self;Node* _node;__RBTreeIterator(Node* node):_node(node){}
};1.operator++()
红黑树是二叉搜索树,采用的是中序遍历的方法。因此,迭代器每次向前走,是按照中序遍历的顺序走的。
因此,对于往前++,有两种情况:第一种情况是当前节点的右孩子不为空,那么按照中序遍历的顺序,下一个节点便是右子树的最小值。第二种情况是当前节点的右孩子为空:这种情况下,又分两种情况:①当前节点是父节点的左孩子,那么下一个节点肯定是当前节点的父节点。②当前节点是父节点的右孩子,这意味着当前节点的父节点也被遍历了,又没有右孩子节点,只能往上找了,找的节点是祖先节点,而这个祖先节点是特征是:孩子节点是它的左节点。
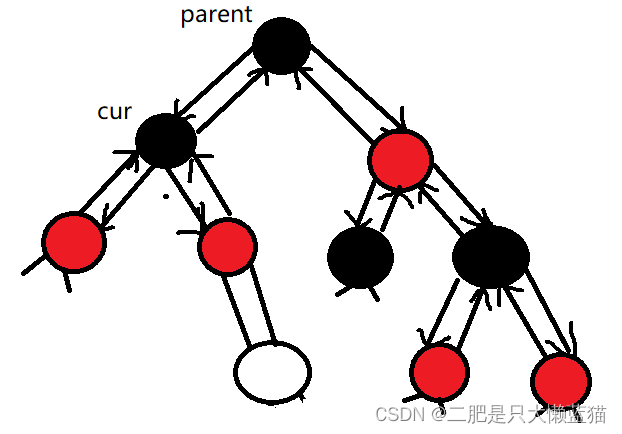
//左 根 右Self& operator++(){//当当前节点的右子树不为空,根据中序遍历的顺序,那就找右子树最小值if (_node->_right){Node* minValue = _node->_right;while (minValue->_left){minValue = minValue->_left;}//找到最小值的节点后,更新节点_node = minValue;}else //当当前节的的右子树为空,说明它是叶子节点。此时需要判断情况{//判断当前节点是父亲节点的左孩子还是右孩子//第一种情况:如果是cur==parent->_right,即当前节点是父节点的右孩子的话,就//去找祖先节点(这个祖先节点的特征:孩子节点是它的左节点)//第二种情况:当前节点是父亲节点的左孩子,那么下一个节点就是父亲节点了Node* cur = _node;//定义父亲节点。Node* parent = cur->_parent;//如果当前节点不是父亲的右孩子,并且父亲是不存在,那么就是根节点或者是左孩子节点了//那就不进入循环。while (parent && cur == parent->_right){//如果是,那就往上找到下一个节点。cur = cur->_parent;parent = parent->_parent;}//更新节点_node = parent;}return *this;}2.begin()和end();
迭代器的begin和end,是左闭右开的区间。那么begin就是最左的节点,end则是最右节点的下一个节点。这里不使用哨兵来作为end节点。
对于begin,就找到最左的节点就好啦!
iterator begin(){Node* left = _root;while (left && left->_left){left = left->_left;}return iterator(left);}对于end,这里选择直接置为空,传入匿名对象。这样子做的话,当遍历到最后一个节点后,它会往回遍历,一直到了根节点的上面一个节点,也就是空。此时就会结束循环。
iterator end(){return iterator(nullptr);}迭代器整体代码:
template<class ValueType>
struct __RBTreeIterator
{typedef RBTreeNode<ValueType> Node;typedef __RBTreeIterator<ValueType> Self;Node* _node;__RBTreeIterator(Node* node):_node(node){}ValueType& operator*(){return _node->_data;}ValueType* operator->(){return &_node->_data;}Self& operator++(){if (_node->_right){Node* minValue = _node->_right;while (minValue->_left){minValue = minValue->_left;}_node = minValue;}else {Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_right){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}bool operator!=(const Self& s){return _node != s._node;}
};set的模拟实现
仿函数
由于set只有Key,因此就让仿函数直接返回Key值就可以了。
template<class K>class set{//set的仿函数,返回set的K值struct SetKeyOfValue{const K& operator()(const K& key){return key;}};整体都是复用了红黑树的接口,并没有什么技术含量,问题都在红黑树中解决了。
namespace my_set
{template<class K>class set{//set的仿函数,返回set的K值struct SetKeyOfValue{const K& operator()(const K& key){return key;}};public:typedef typename RBTree<K, K, SetKeyOfValue>::iterator iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}bool insert(const K& key){return _t.Insert(key);}private:RBTree<K, K, SetKeyOfValue> _t;};map的模拟实现:
仿函数
由于比较的是first,因此我们返回键值对中的first即可。
template<class K, class V>class map{struct MapKeyOfValue{const K& operator()(const pair<const K, V>& kv){return kv.first;}};整体代码,一样的都是复用了红黑树的接口,并没有什么技术含量:
namespace my_map
{template<class K, class V>class map{struct MapKeyOfValue{const K& operator()(const pair<const K, V>& kv){return kv.first;}};public:typedef typename RBTree<K, pair<const K, V>, MapKeyOfValue>::iterator iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}bool insert(const pair<const K, V>& kv){return _t.Insert(kv);}private:RBTree<K, pair<const K, V>, MapKeyOfValue> _t;};最后是红黑树的整体代码,这段代码跟单独写的红黑树的代码差不多,就是在新增节点的操作那里,比较节点的值使用的是仿函数。
#pragma once//使用枚举
enum Colour
{RED,BLACK,
};// 如果是map,则为pair<K, V>; 如果是set,则为k
//因此,对于节点来说,需要再套一层模板,来应付两种不同的情况
template<class T>
struct RBTreeNode
{T _data;RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;Colour _col;RBTreeNode(const T& data):_data(data), _left(nullptr), _right(nullptr), _parent(nullptr), _col(RED) //默认是红色{}
};template<class ValueType>
struct __RBTreeIterator
{typedef RBTreeNode<ValueType> Node;typedef __RBTreeIterator<ValueType> Self;Node* _node;__RBTreeIterator(Node* node):_node(node){}ValueType& operator*(){return _node->_data;}ValueType* operator->(){return &_node->_data;}//左 根 右Self& operator++(){//当当前节点的右子树不为空,根据中序遍历的顺序,那就找右子树最小值if (_node->_right){Node* minValue = _node->_right;while (minValue->_left){minValue = minValue->_left;}//找到最小值的节点后,更新节点_node = minValue;}else //当当前节的的右子树为空,说明它是叶子节点。此时需要判断情况{//判断当前节点是父亲节点的左孩子还是右孩子//第一种情况:如果是cur==parent->_right,即当前节点是父节点的右孩子的话,就//去找祖先节点(这个祖先节点的特征:孩子节点是它的左节点)//第二种情况:当前节点是父亲节点的左孩子,那么下一个节点就是父亲节点了Node* cur = _node;//定义父亲节点。Node* parent = cur->_parent;//如果当前节点不是父亲的右孩子,并且父亲是不存在,那么就是根节点或者是左孩子节点了//那就不进入循环。while (parent && cur == parent->_right){//如果是,那就往上找到下一个节点。cur = cur->_parent;parent = parent->_parent;}//更新节点_node = parent;}return *this;}bool operator!=(const Self& s){return _node != s._node;}
};
//跟节点的定义一样
//因为关联式容器中存储的是<key, value>的键值对,因此
// k为key的类型,
// ValueType: 如果是map,则为pair<K, V>; 如果是set,则为k。如下:
// map->RBTree<K,pair<const K,V>,MapKeyOfT> _t;
// set->RBTree<K,K,SetKeyOfT> _t
//
// KeyOfValue: 通过value来获取key的一个仿函数类。其作用就是用于比较。
template<class K,class ValueType,class KeyOfValue>
class RBTree
{typedef RBTreeNode<ValueType> Node;
public:typedef __RBTreeIterator<ValueType> iterator;iterator begin(){Node* left = _root;while (left && left->_left){left = left->_left;}return iterator(left);}iterator end(){return iterator(nullptr);}bool Insert(const ValueType& data){//先按二叉搜索树的规矩来创建一棵二叉搜索树if (_root == nullptr){_root = new Node(data);//因为红黑树的根节点是黑色的_root->_col = BLACK;return true;}KeyOfValue kot;Node* parent = nullptr;Node* cur = _root;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(data);cur->_col = RED;//多写一步,防止写错代码。if (kot(parent->_data) < kot(data)){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}//创建完二叉搜索树//开始创建红黑树,使用颜色来判断是否需要调整//循环往上走,循环条件:当走到的parent不为空,并且parent是红色的//即我们列举是三种情况,parent都是红的,就需要重新调整//如果parent是黑色的,那就不需要了。直接就是一棵红黑树,不进入循环while (parent && parent->_col == RED){//保存祖先节点,即g节点Node* grandfther = parent->_parent;//判断父节点是在祖先节点的哪边if (parent == grandfther->_left){//父节点在左边,那么叔叔节点就在右边Node* uncle = grandfther->_right;//情况一:uncle存在且为红。改变颜色即可if (uncle && uncle->_col == RED){//变色。parent->_col = uncle->_col = BLACK;grandfther->_col = RED;//往上走cur = grandfther;parent = cur->_parent;}else //uncle不存在 或者 存在但是黑色{//情况二 p是g的左孩子,cur是p的左孩子,以g为轴右单旋if (cur == parent->_left){//右单旋RotateR(grandfther);//变色 右单旋后,parent为根节点,变黑色。cur和g节点为红色parent->_col = BLACK;grandfther->_col = RED;}else //情况三 p是g的左孩子,cur是p的右孩子.{//先以p为轴左旋转RotateL(parent);//变成情况二,再以g为轴右单旋RotateR(grandfther);//变色 cur变成根节点,为黑色。p和g是红色cur->_col = BLACK;grandfther->_col = RED;}break;}}else //parent是在grandfther的右边{//叔叔节点就在祖先节点的左边Node* uncle = grandfther->_left;//情况一:uncle存在且为红。改变颜色即可if (uncle && uncle->_col == RED){//变色。parent->_col = uncle->_col = BLACK;grandfther->_col = RED;//往上走cur = grandfther;parent = cur->_parent;}else //uncle不存在 或者 存在但是黑色{//情况二 p是g的右孩子,cur是p的右孩子。if (cur == parent->_right){//左单旋RotateL(grandfther);//变色 右单旋后,parent为根节点,变黑色。cur和g节点为红色parent->_col = BLACK;grandfther->_col = RED;}else //情况三 p是g的右孩子,cur是p的左孩子.{//先以p为轴右旋转RotateR(parent);//变成情况二,再以g为轴左单旋RotateL(grandfther);//变色 cur变成根节点,为黑色。p和g是红色cur->_col = BLACK;grandfther->_col = RED;}break;}}}//最后将根节点置为黑_root->_col = BLACK;return true;}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL){subRL->_parent = parent;}Node* ppNode = parent->_parent;subR->_left = parent;parent->_parent = subR;if (ppNode == nullptr){_root = subR;_root->_parent = nullptr;}else{if (ppNode->_left == parent){ppNode->_left = subR;}else{ppNode->_right = subR;}subR->_parent = ppNode;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR){subLR->_parent = parent;}Node* ppNode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (ppNode == nullptr){_root = subL;_root->_parent = nullptr;}else{if (ppNode->_left == parent){ppNode->_left = subL;}else{ppNode->_right = subL;}subL->_parent = ppNode;}}void Inorder(){_Inorder(_root);}void _Inorder(Node* root){if (root == nullptr)return;_Inorder(root->_left);std::cout << root->_kv.first << ": " << root->_kv.second << std::endl;_Inorder(root->_right);}bool Check(Node* root, int blackNum, const int ref){if (root == nullptr){//cout << blackNum << endl;if (blackNum != ref){cout << "违反规则:本条路径的黑色节点的数量跟最左路径不相等" << endl;return false;}return true;}if (root->_col == RED && root->_parent->_col == RED){cout << "违反规则:出现连续红色节点" << endl;return false;}if (root->_col == BLACK){++blackNum;}return Check(root->_left, blackNum, ref)&& Check(root->_right, blackNum, ref);}bool IsBalance(){if (_root == nullptr){return true;}if (_root->_col != BLACK){return false;}int ref = 0;Node* left = _root;while (left){if (left->_col == BLACK){++ref;}left = left->_left;}return Check(_root, 0, ref);}
private:Node* _root = nullptr;
};相关文章:
使用红黑树模拟实现map和set
在STL的源代码中,map和set的底层原理都是红黑树。但这颗红黑树跟我们单独写的红黑树不一样,它需要改造一下: 改造红黑树 节点的定义 因为map和set的底层都是红黑树。而且map是拥有键值对pair<K,V>的,而set是没有键值对&a…...
【django项目开发】用户登录后缓存权限到redis中(十)
这里写目录标题一、权限的数据的特点二、首先settings.py文件中配置redis连接redis数据库一、权限的数据的特点 需要去数据库中频繁的读和写,为了项目提高运行效率,可以把用户的权限在每次登录的时候都缓存到redis中。这样的话,权限判断的中…...
算法总结c++
文章目录基本概念时间复杂度空间复杂度基本结构1. 数组前缀和差分数组快慢指针(索引)左右指针(索引)盛水容器三数之和最长回文子串2. 链表双指针删除链表的倒数第 n 个结点翻转链表递归将两个升序链表合并为一个新的 升序 链表链表翻转3. 散列表twoSum无…...
Python 之 NumPy 切片索引和广播机制
文章目录一、切片和索引1. 一维数组2. 二维数组二、索引的高级操作1. 整数数组索引2. 布尔数组索引三、广播机制1. 广播机制规则2. 对于广播规则另一种简单理解一、切片和索引 ndarray 对象的内容可以通过索引或切片来访问和修改(),与 Pytho…...
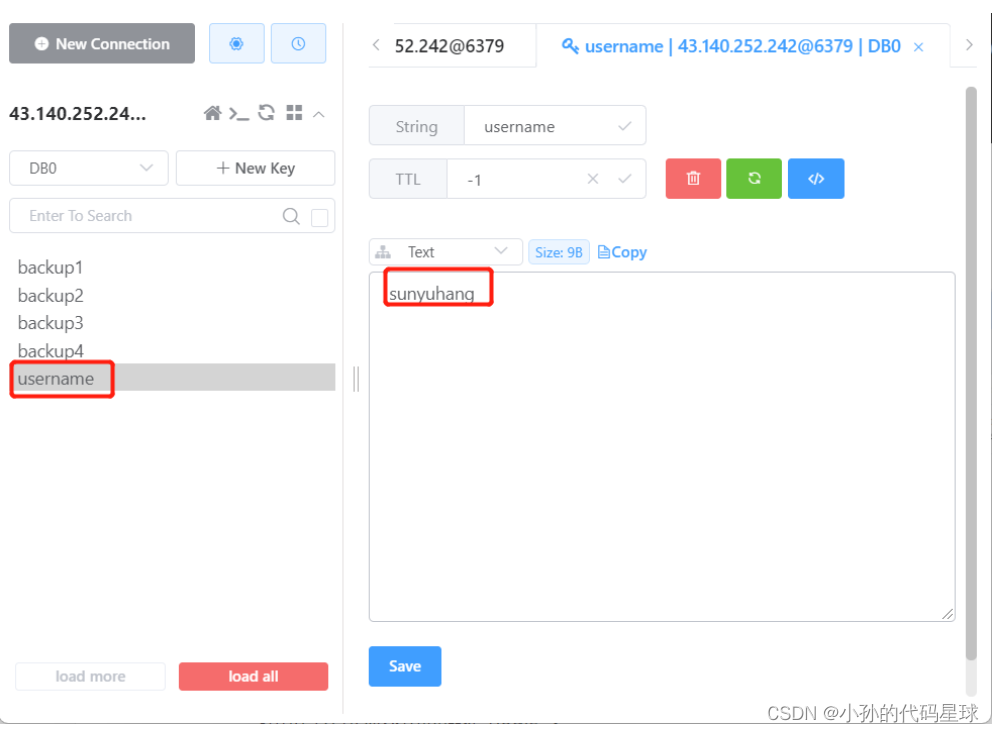
Redis【包括Redis 的安装+本地远程连接】
Redis 一、为什么要用缓存? 缓存定义 缓存是一个高速数据交换的存储器,使用它可以快速的访问和操作数据。 程序中的缓存 在我们程序中,如果没有使用缓存,程序的调用流程是直接访问数据库的; 如果多个程序调用一个数…...
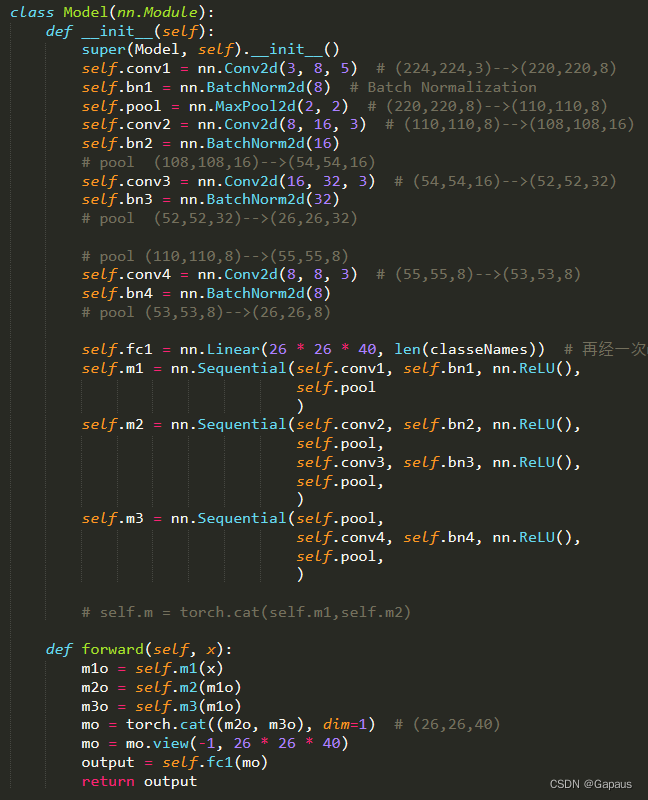
深度学习训练营_第P3周_天气识别
🍨 本文为🔗365天深度学习训练营 中的学习记录博客🍦 参考文章:Pytorch实战 | 第P3周:彩色图片识别:天气识别**🍖 原作者:K同学啊|接辅导、项目定制**␀ 本次实验有两个新增任务&…...
)
“华为杯”研究生数学建模竞赛2006年-【华为杯】C题:维修线性流量阀时的内筒设计问题(附获奖论文及matlab代码)
赛题描述 油田采油用的油井都是先用钻机钻几千米深的孔后,再利用固井机向四周的孔壁喷射水泥砂浆得到水泥井管后形成的。固井机上用来控制砂浆流量的阀是影响水泥井管质量的关键部件,但也会因磨损而损坏。目前我国还不能生产完整的阀体,固井机仍依赖进口。由于损坏的内筒已…...

数据结构:带环单链表基础OJ练习笔记(leetcode142. 环形链表 II)(leetcode三题大串烧)
目录 一.前言 二.leetcode160. 相交链表 1.问题描述 2.问题分析与求解 三.leetcode141. 环形链表 1.问题描述 2.代码思路 3.证明分析 下一题会用到的重要小结论: 四.leetcode142. 环形链表 II 1.问题描述 2.问题分析与求解 Judgecycle接口…...

数模美赛如何找数据 | 2023年美赛数学建模必备数据库
2023美赛资料分享/思路答疑群:322297051 欧美相关统计数据(一般美赛这里比较多) 1、http://www.census.gov/ 美国统计局(统计调查局或普查局)官方网站 The Census Bureau Web Site provides on-line access to our …...

SSTI漏洞原理及渗透测试
模板引擎(Web开发中) 是为了使 用户界面 和 业务数据(内容)分离而产生的,它可以生成特定格式的文档, 利用模板引擎来生成前端的HTML代码,模板引擎会提供一套生成HTML代码的程序,之后…...
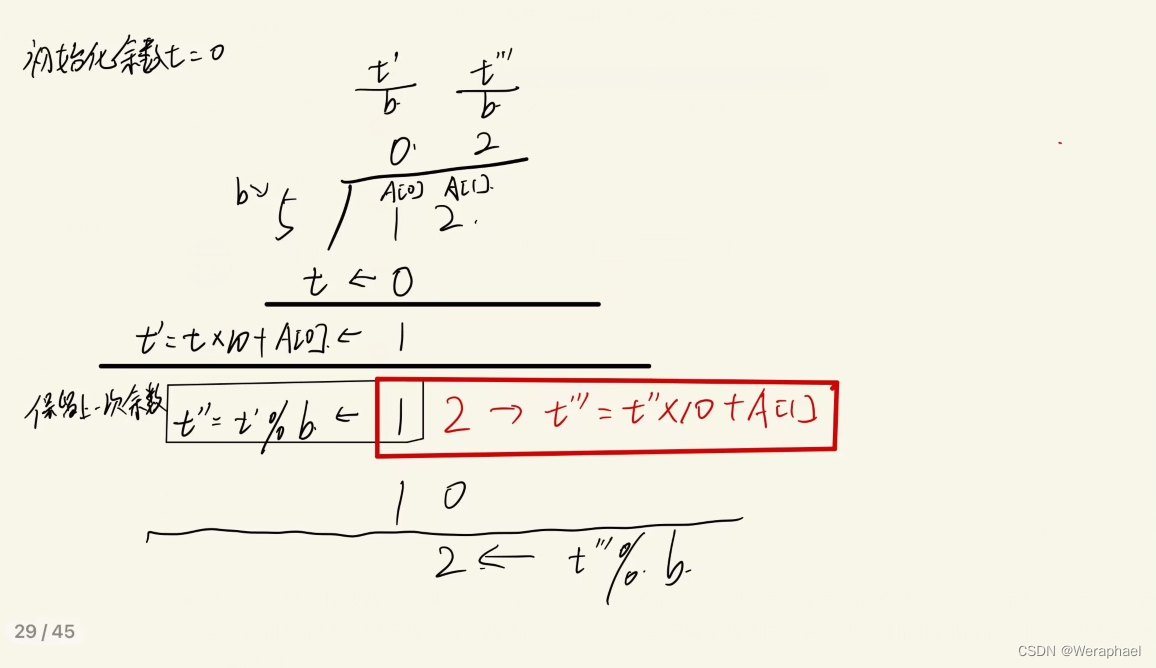
【算法基础】高精度除法
👦个人主页:Weraphael ✍🏻作者简介:目前是C语言 算法学习者 ✈️专栏:【C/C】算法 🐋 希望大家多多支持,咱一起进步!😁 如果文章对你有帮助的话 欢迎 评论💬…...
, loss.backward(), optimizer.step()的理解及使用)
optimizer.zero_grad(), loss.backward(), optimizer.step()的理解及使用
optimizer.zero_grad,loss.backward,optimizer.step用法介绍optimizer.zero_grad():loss.backward():optimizer.step():用法介绍 这三个函数的作用是将梯度归零(optimizer.zero_grad())&#x…...

融资、量产和一栈式布局,这家Tier 1如此备战高阶智驾决赛圈
作者 | Bruce 编辑 | 于婷从早期的ADAS,到高速/城市NOA,智能驾驶的竞争正逐渐升级,这对于车企和供应商的核心技术和产品布局都是一个重要的考验。 部分智驾供应商已经在囤积粮草,响应变化。 2023刚一开年,智能驾驶领域…...
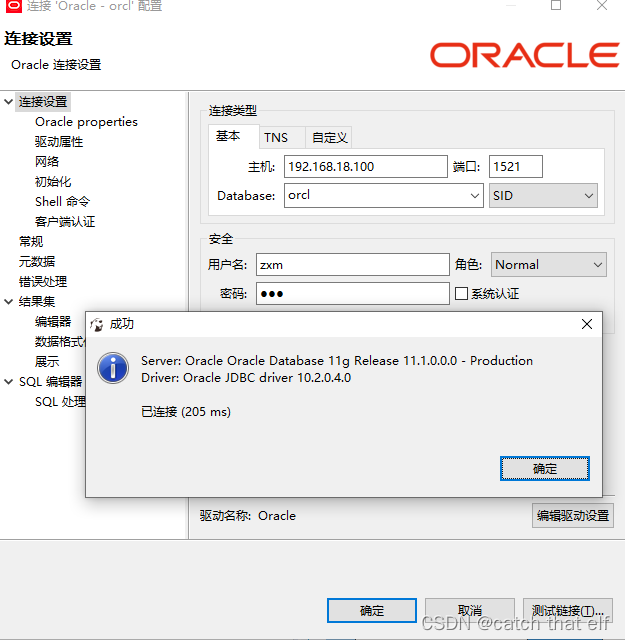
centos7.8安装oralce11g
文章目录环境安装文件准备添加用户操作系统环境配置解压安装问题解决创建用户远程连接为了熟悉rman备份操作,参照大神的博客在centos中安装了一套oracle11g,将安装步骤记录如下环境安装文件准备 这里准备一台centos7.8 虚拟机 配置ip 192.168.18.100 主…...

【蓝桥杯集训·每日一题】AcWing 3956. 截断数组
文章目录一、题目1、原题链接2、题目描述二、解题报告1、思路分析2、时间复杂度3、代码详解三、知识风暴一维前缀和一、题目 1、原题链接 3956. 截断数组 2、题目描述 给定一个长度为 n 的数组 a1,a2,…,an。 现在,要将该数组从中间截断,得到三个非空子…...
万丈高楼平地起:Linux常用命令
目录 系统管理命令 man命令 ls命令 cd命令 useradd命令 passwd命令 free命令 whoami命令 ps命令 date命令 pwd命令 shutdown命令 文件目录管理命令 touch命令 cat命令 mkdir命令 rm命令 cp命令 mv命令 find命令 more指令 less指令 head指令 tail指令 …...
Linux(Linux的连接使用)
连接Linux我们一般使用CRT或者Xshell工具进行连接使用。 如CRT使用SSH的方式 输出主机,账户,密码那些就可以连接上了。 Linux系统是一个文件型操作系统,有一句话说Linux的一切皆是文件。Linux系统的启动大致有下面几个步骤 Linux系统有7个运…...
Unity中画2D图表(2)——用XChart包绘制散点分布图 + 一条直线方程
散点图用于显示关系。 对于 【相关性】 ,散点图有助于显示两个变量之间线性关系的强度。 对于 【回归】 ,散点图常常会添加拟合线。 举例1:你可以展示【年降雨量】与【玉米亩产量】的关系 举例2:你也可以分析各个【节假日】与【大…...

Go 排序包 sort
写在前面的使用总结: 排序结构体 实现Len,Less,Swap三个函数 package main import ( "fmt" "sort") type StuScore struct { name string score int } type StuScores []StuScore func (s StuScores) Len(…...

Java Email 发HTML邮件工具 采用 freemarker模板引擎渲染
Java Email 发HTML邮件工具 采用 freemarker模板引擎 1.常用方式对比 Java发送邮件有很多的实现方式 第一种:Java 原生发邮件mail.jar和activation.jar <!-- https://mvnrepository.com/artifact/javax.mail/mail --> <dependency><groupId>jav…...

终极指南:如何使用qmcdump轻松解密QQ音乐加密音频文件
终极指南:如何使用qmcdump轻松解密QQ音乐加密音频文件 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 你是否…...

工业意识:03 组态软件怎么选?WinCC、FactoryTalk、国产一篇讲透
03 组态软件怎么选?WinCC、FactoryTalk、国产一篇讲透 前面咱们把SCADA聊成“千里眼”,MES聊成“透明玻璃房”,现在终于到最爽的部分——画面组态!简单说,就是用鼠标拖拖拽拽,在电脑上搭出那些监控大屏:仪表盘、按钮、趋势图、报警灯、3D管道……全连上PLC变量,点一下…...

41_《智能体微服务架构企业级实战教程》智能助手主应用服务之创建FastMCP客户端
前言 配套视频教程: 在 Bilibili课堂、CSDN课程、51CTO学堂 同步发售,提供:源码+部署脚本+文档。 bilibili课堂视频教程:智能体微服务架构企业级实战教程_哔哩哔哩_bilibili CSDN课程视频教程:智能体微服务架构企业级实战教程_在线视频教程-CSDN程序员研修院 51CTO学堂…...

太流批了,发票合并神器
今天给大家推荐两款软件,一款是图片转PDF,一款是发票合并工具。有需要的小伙伴可以下载收藏。 第一款:png2pdf png2pdf是一款png图片转PDF的小工具,这类的工具之前也有推荐过,但是今天这款比较特殊。 只要把图片拖入软…...

STM32CubeMX LL库配置外部中断,从按键消抖到中断嵌套的实战避坑指南
STM32CubeMX LL库外部中断深度优化:从硬件消抖到中断嵌套的工程实践 当你的嵌入式系统需要实时响应外部事件时,外部中断(EXTI)往往是最高效的选择。但在实际项目中,简单配置EXTI只是开始——按键抖动导致的误触发、中断优先级冲突引发的死锁、…...

终极Mac菜单栏整理指南:用Ice让你的桌面从此清爽高效
终极Mac菜单栏整理指南:用Ice让你的桌面从此清爽高效 【免费下载链接】Ice Powerful menu bar manager for macOS 项目地址: https://gitcode.com/GitHub_Trending/ice/Ice 你是否厌倦了Mac菜单栏上密密麻麻的图标?是否经常因为找不到需要的应用图…...

可穿戴ESD监测:从被动防护到主动感知的静电管理革命
1. 项目概述:当静电成为“幽灵”,可穿戴监测如何为航空航天制造“显形” 在航空航天和高可靠性电子制造领域,我们常常与一个看不见的“幽灵”作斗争——静电放电。这个“幽灵”无声无息,却能轻易摧毁价值数十万甚至数百万美元的精…...
)
Simulink模块搭建跟踪误差不归零?可能是隐藏的信号延迟在捣鬼(附S函数解法)
Simulink隐性信号延迟:从图形化建模到S函数的高精度控制实践 在控制系统仿真领域,Simulink作为行业标准工具链的核心组件,其图形化建模方式极大降低了算法验证的门槛。但当工程师从功能实现进阶到性能优化阶段时,常常会遇到一个令…...

门电路的电气特性详解
门电路的电气特性详解 深入理解门电路的电气参数,是设计可靠数字系统的必备知识。 🎯 本章学习要点 理解输入/输出电压阈值参数掌握扇入扇出的概念和计算了解传输延迟对电路的影响理解功耗来源及优化策略 1️⃣ 输入输出特性参数 1.1 电压阈值参数 &a…...

从零开始:sherpa-onnx跨平台语音识别终极指南
从零开始:sherpa-onnx跨平台语音识别终极指南 【免费下载链接】sherpa-onnx Speech-to-text, text-to-speech, speaker diarization, speech enhancement, source separation, and VAD using next-gen Kaldi with onnxruntime without Internet connection. Support…...