ROS话题通信自定义+发布订阅代码--03
话题通信自定义msg
在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息… std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型
msgs只是简单的文本文件,每行具有字段类型和字段名称,可以使用的字段类型有:
int8, int16, int32, int64 (或者无符号类型: uint*)浮点数:float32, float64string时间:time, duration:持续时间other msg files数组:
variable-length array[]:变长数组,所有这些技巧也能被扩展到三或更多维数组.
fixed-length array[C]:
ROS中还有一种特殊类型:Header,标头包含时间戳(消息被发出去的哪一刻时间值)和ROS中常用的坐标帧信息。会经常看到msg文件的第一行具有Header标头。
需求:创建自定义消息,该消息包含人的信息:姓名、身高、年龄等。
流程:
按照固定格式创建 msg 文件
编辑配置文件
编译生成可以被 Python 或 C++ 调用的中间文件
1.定义msg文件
功能包下新建 msg 目录,添加文件 Person.msg

string name
uint16 age
float64 height
2.编辑配置文件
package.xml中添加编译依赖与执行依赖

<build_depend>message_generation</build_depend><exec_depend>message_runtime</exec_depend>3.CMakeLists.txt编辑 msg 相关配置
编译是依赖

find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)
需要加入 message_generation,必须有 std_msgs
配置 msg 源文件

add_message_files(FILESPerson.msg
)
生成消息时依赖于 std_msgs

generate_messages(DEPENDENCIESstd_msgs
)
执行时依赖
上面的 roscpp rospy std_msgs message_generation功能包要依赖下面的CATKIN_DEPENDS roscpp rospy std_msgs message_runtime功能包,也可以理解成运行时依赖

catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listenerCATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
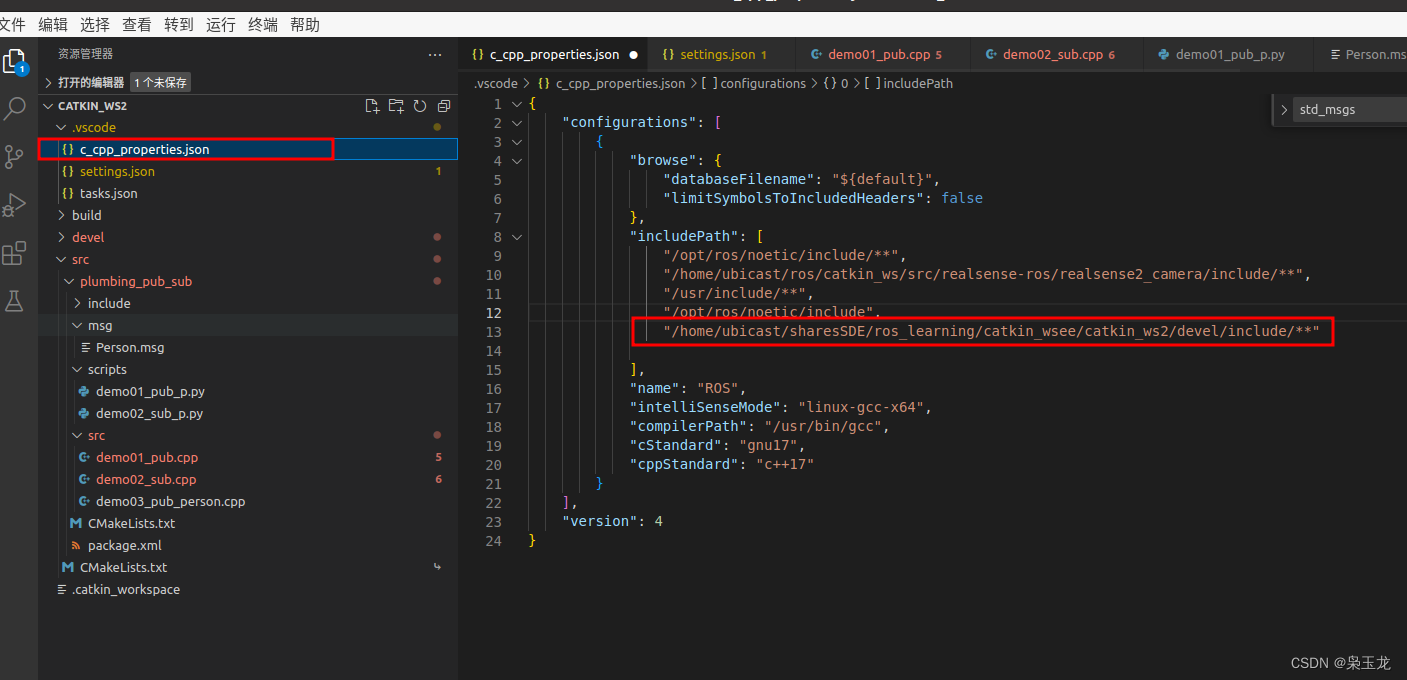
vscode 配置调用中间编译形成的文件
为了方便代码提示以及避免误抛异常,需要先配置 vscode,将前面生成的 head 文件路径配置进 c_cpp_properties.json 的 includepath属性:
发布者
/*需求: 循环发布人的信息*/#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"//消息类型,这个就调用了编译形成的中间文件,int main(int argc, char *argv[])
{setlocale(LC_ALL,"");//1.初始化 ROS 节点ros::init(argc,argv,"talker_person");//2.创建 ROS 句柄ros::NodeHandle nh;//3.创建发布者对象话题,plumbing_pub_sub::Person:是通过功能包的消息类型来设置的,参数1是话题的名称,参数二为对应的编译后调用的功能.h文件ros::Publisher pub = nh.advertise<plumbing_pub_sub::Person>("chatter_person",1000);//4.组织被发布的消息,编写发布逻辑并发布消息plumbing_pub_sub::Person person;person.name = "sunwukong";person.age = 2000;person.height = 1.45;ros::Rate r(1);//发布频率。逻辑(一秒1次),1HZ while (ros::ok()){pub.publish(person);//数据的发布person.age += 1;ROS_INFO("我叫:%s,今年%d岁,高%.2f米", person.name.c_str(), person.age, person.height);r.sleep();//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;ros::spinOnce();//回头函数,来处理回调函数,但是这个没有回调函数,占时没有用上}return 0;
}配置CMakeLists.txt文件
add_executable(demo03_pub_person src/demo03_pub_person.cpp)

target_link_libraries(demo03_pub_person${catkin_LIBRARIES}
)配置CMakeLists.txt文件

配置CMakeLists.txt文件
用来保证调用的依赖关系,就是编译顺序,要先保证msg下的Person.msg才能编译demo03_pub_person src/demo03_pub_person.cpp文件
add_dependencies(demo03_pub_person ${PROJECT_NAME}_generate_messages_cpp)

订阅者
/*需求: 订阅人的信息*/# 配置CMakeLists.txt文件#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"void doPerson(const plumbing_pub_sub::Person::ConstPtr话题通信自定义msg
& Person){ROS_INFO("订阅的人信息:%s, %d, %.2f", Person->name.c_str(), Person->age, Person->height);
}int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");//1.初始化 ROS 节点ros::init(argc,argv,"listener_person");//2.创建 ROS 句柄ros::NodeHandle nh;//3.创建订阅对象ros::Subscriber sub = nh.subscribe<plumbing_pub_sub::Person>("chatter_person",10,doPerson);//4.回调函数中处理 person//5.ros::spin();ros::spin();//return 0;
}配置CMakeLists.txt文件
add_executable(demo04_sub_person src/demo04_sub_person.cpp)target_link_libraries(demo04_sub_person${catkin_LIBRARIES}
)
终端命令
发布者
roscore
rosrun plumbing_pub_sub demo03_pub_person
rosrun plumbing_pub_sub demo04_sub_person
构建py代码
#! /usr/bin/env python
"""发布方:循环发送消息"""
import rospy
from plumbing_pub_sub.msg import Personif __name__ == "__main__":#1.初始化 ROS 节点rospy.init_node("talker_person_p")#2.创建发布者对象pub = rospy.Publisher("chatter_person",Person,queue_size=10)#3.组织消息p = Person()p.name = "葫芦瓦"p.age = 18p.height = 0.75#4.编写消息发布逻辑rate = rospy.Rate(1)while not rospy.is_shutdown():pub.publish(p) #发布消息rate.sleep() #休眠rospy.loginfo("姓名:%s, 年龄:%d, 身高:%.2f",p.name, p.age, p.height)订阅者
/*需求: 订阅人的信息*/#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"void doPerson(const plumbing_pub_sub::Person::ConstPtr& Person){ROS_INFO("订阅的人信息:%s, %d, %.2f", Person->name.c_str(), Person->age, Person->height);
}int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");//1.初始化 ROS 节点ros::init(argc,argv,"listener_person");//2.创建 ROS 句柄ros::NodeHandle nh;//3.创建订阅对象ros::Subscriber sub = nh.subscribe<plumbing_pub_sub::Person>("chatter_person",10,doPerson);//4.回调函数中处理 person//5.ros::spin();ros::spin();//return 0;
}配置CMakeLists.txt文件
scripts/demo03_pub_preson_p.pyscripts/demo04_sub_preson_p.py

使用命令终端
roscore
sudo chmod +x *.py ##在catkin_ws2/src/plumbing_pub_sub/scripts文件中使用命令
rosrun plumbing_pub_sub demo03_pub_preson_p.py
rosrun plumbing_pub_sub demo04_sub_preson_p.py
相关文章:
ROS话题通信自定义+发布订阅代码--03
话题通信自定义msg 在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味…...

【MySQL】实验七 视图
文章目录 1. 建立city值为上海、北京的顾客视图2. 建立城市为上海的客户2016年的订单信息视图3. SQL视图:建立视图AVG_CJ4. SQL视图:建立视图IS_STUDENT5. SQL视图:建立视图CJ_STUDENT6. SQL视图:根据视图CJ_STUDENT创建视图CJ_TJ1. 建立city值为上海、北京的顾客视图 建立…...

Linux常见操作命令【三】
一、系统资源 1.1 ps(process staus) ps -ef e显示所有进程、f全格式 ps -aux 显示所有包含其他使用者的进程 ps -ef | grep CCC 查找含有CCC进程的格式 ps -u username 显示指定进程用户信息1.2 kill kill 12345 杀死进程12345 kill -KILL…...
C-关键字(下)
文章目录循环控制switch-case-break-defaultdo-while-forgetchar()break-continuegotovoidvoid*returnconstconst修饰变量const修饰数组const修饰指针指针补充const 修饰返回值volatilestruct柔型数组union联合体联合体空间开辟问题利用联合体的性质,判断机器是大端还是小端enu…...

关于电商商品数据API接口列表,你想知道的(详情页、Sku信息、商品描述、评论问答列表)
目录 一、商品数据API接口列表 二、商品详情数据API调用代码item_get 三、获取sku详细信息item_sku 四、获得淘宝商品评论item_review 五、数据说明文档 进入 一、商品数据API接口列表 二、商品详情数据API调用代码item_get <?php// 请求示例 url 默认请求参数已经URL…...

232:vue+openlayers选择左右两部分的地图,不重复,横向卷帘
第232个 点击查看专栏目录 本示例的目的是介绍演示如何在vue+openlayers项目中自定义js实现横向卷帘。这个示例中从左右两个选择框中来选择不同的地图,做了不重复的处理,即同一个数组,两部分根据选择后的状态做disabled处理,避免重复选择。 直接复制下面的 vue+openlayers…...
溯源取证-内存取证 高难度篇
今天的场景依然是windows场景,只不过此次场景分为两个镜像,本次学习主要学习如何晒别钓鱼邮件、如何提取钓鱼邮件、如何修复损坏的恶意文件、如何提取DLL动态链接库文件 本次需要使用的工具: volatility_2.6_lin64_standalone readpst clams…...

JAVA语言中的代理模式
代理可以进一步划分为静态代理和动态代理,代理模式在实际的生活中场景很多,例如中介、律师、代购等行业,都是简单的代理逻辑,在这个模式下存在两个关键角色: 目标对象角色:即代理对象所代表的对象。 代理…...

最后一步:渲染和绘制
浏览器的工作步骤如下: URL>字符流>词(token)流>DOM树(不含样式信息的 DOM)>DOM树CSS规则(含样式信息的 DOM)>根据样式信息,计算了每个元素的位置和大小>根据这些…...

C++类和对象终章——友元函数 | 友元类 | 内部类 | 匿名对象 | 关于拷贝对象时一些编译器优化
文章目录💐专栏导读💐文章导读🌷友元🌺概念🌺友元函数🍁友元函数的重要性质🌺友元类🍁友元类的重要性质🌷内部类(不常用)🌺内部类的性…...

拼多多按关键字搜索商品 API
一、拼多多平台优势: 1、独创拼团模式 拼团拼单是拼多多独创的营销模式,其特点是基于人脉社交的裂变传播,非常具有传播性。 由于本身走低价路线,加上拼单折扣,商品的分享和人群裂变效果非常明显,电商前期…...

全链路日志追踪
背景 最近线上的日志全局追踪 traceId 不好使了,不同请求经常出现重复的 traceId,或者通过某个请求的 traceId 追踪搜索,检索出了与该请求完全不相干的日志。我领导叫我去排查解决这个问题,这里我把我排查的过程思路以及如何解决…...

ZYNQ:【1】深入理解PS端的TTC定时器(Part1:原理+官方案例讲解)
碎碎念:好久不见,甚是想念!本期带来的是有关ZYNQ7020的内容,我们知道ZYNQ作为一款具有硬核的SOC,PS端很强大,可以更加便捷地实现一些算法验证。本文具体讲解一下里面的TTC定时器,之后发布的Part…...

蓝牙设备如何自定义UUID
如何自定义UUID 所有 BLE 自定义服务和特性必须使用 128 位 UUID 来识别,并且要确保基本 UUID 与 BLE 定义的基本 UUID(00000000-0000-1000-8000-00805F9B34FB)不一样。基本 UUID 是一个 128 位的数值,根据该值可定义标准UUID&am…...
好看的html登录界面,
界面效果: 代码: <!DOCTYPE html> <html><head><title>Login Page</title><style>body {background-color: #f2f2f2;font-family: Arial, sans-serif;}form {background-color: #fff;border-radius: 5px;box-shado…...
Java模拟星空
目录 前言 JavaFX基础 1. GraphicsContext 2. AnimationTimer 代码实现 完整代码 前言 看了Python模拟星空很漂亮,Java也应该必须有一个! 环境:只需要JDK1.8就好!不需要外部包!!! Jav…...
YGG 代表 Web3 Gaming 参加 2023 年游戏开发者大会
Yield Guild Games(YGG)在 2023 年 3 月 20 日至 24 日在加州旧金山举行的游戏开发者大会(GDC)上大显身手,这是游戏开发者的重要交流学习活动。虽然 GDC 本身提供了多种多样的活动,包括讲座、小组讨论、圆桌…...

水库安全运行智慧管理平台解决方案筑牢防汛“安全墙”
解决方案 水库安全运行智慧管理系统解决方案,系统主要由降雨量监测站、水库水位监测站、大坝安全监测中的渗流量、渗流压力和变形监测站及视频和图像监测站等站点组成,同时建立规范、统一的监测平台,集数据传输、信息共享、数据储存于一体&a…...

Exchange升级部署方案
目录 前言 一、需求分析 二、升级前准备 1.备份当前 Exchange Server 数据...

AE开发之图层渲染20210603
AE开发之图层渲染比例符号化地图的整饰唯一值符号的符号化过程点符号设置,线符号设置标注图层,(写得不好,不推荐看) 唯一值符号化,字段进行设置,这里用到了UniqueValueRenderer接口,这里面有一…...

5分钟彻底解决Mac NTFS读写难题:开源工具Nigate完全指南
5分钟彻底解决Mac NTFS读写难题:开源工具Nigate完全指南 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, and management …...

3D设计工作流的终极桥梁:如何用stltostp高效解决STL到STEP格式转换难题
3D设计工作流的终极桥梁:如何用stltostp高效解决STL到STEP格式转换难题 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp 当你在3D打印与CAD设计之间切换时,是否经常遇到这…...
)
从零开始:手把手教你用Nachos模拟硬盘,理解文件系统底层布局(附DISK文件分析)
从零开始:手把手教你用Nachos模拟硬盘,理解文件系统底层布局(附DISK文件分析) 操作系统课程中,文件系统往往是最抽象难懂的部分之一。当教授在黑板上画出inode、位图和目录项的关系图时,你是否曾困惑这些逻…...
)
特斯拉Model 3车主必看:用华为随行WiFi+流量卡,低成本搞定车载WiFi(附Type-C供电方案)
特斯拉Model 3车主必看:低成本车载WiFi实战指南 特斯拉Model 3的车载娱乐系统依赖网络连接,但官方高级娱乐服务的月费让不少车主犹豫。更糟的是,部分地区的4G信号覆盖不佳,导致在线音乐、实时路况等功能形同虚设。本文将分享一套经…...

AugGPT:基于上下文感知的AI代码生成器设计与实现
1. 项目概述:当代码生成器遇上“增强现实”如果你和我一样,长期在代码的海洋里“游泳”,那么对GitHub上琳琅满目的代码生成工具一定不陌生。从早期的代码片段补全,到如今能生成完整函数甚至模块的AI助手,它们确实极大地…...

你以为路径不会回头?一道 Self Crossing 让无数人当场破防
你以为路径不会回头?一道 Self Crossing 让无数人当场破防 很多人第一次刷到 Self Crossing(路径交叉) 这道题时,都有一种错觉: “不就是判断线段相交吗?这能有多难?” 结果一写代码: 判断漏了 边界炸了 图形绕晕了 Case 全挂了 最后看题解的时候,人都沉默了。 因为…...
)
DeepSeek GSM8K性能深度拆解(数学推理能力天花板首次公开)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek GSM8K性能深度拆解(数学推理能力天花板首次公开) DeepSeek-V2 在 GSM8K 基准测试中以 92.3% 的准确率刷新开源模型纪录,显著超越 Llama-3-70B(8…...

5分钟掌握深度学习字体识别:DeepFont实战指南
5分钟掌握深度学习字体识别:DeepFont实战指南 【免费下载链接】Font_Recognition-DeepFont Its a implementation of DeepFont : Identify Your Font from An Image using Keras 项目地址: https://gitcode.com/gh_mirrors/fo/Font_Recognition-DeepFont 在数…...

从‘听个响’到‘看出门道’:手把手教你用S-TOOLS 4.0分析WAV音频的隐写容量与波形变化
从‘听个响’到‘看出门道’:手把手教你用S-TOOLS 4.0分析WAV音频的隐写容量与波形变化 在数字信息时代,音频文件不仅是声音的载体,更可能成为隐藏秘密信息的"数字信封"。想象一下,你收到一段看似普通的音乐文件&#x…...

Wi-Fi模块在IoT与M2M领域的应用与优化
1. Wi-Fi模块在IoT与M2M领域的核心价值Wi-Fi技术作为物联网(IoT)和机器对机器(M2M)通信的基础设施,其重要性不言而喻。根据行业数据,到2025年全球IoT设备数量预计将突破750亿台,其中超过60%的设备将采用Wi-Fi作为主要连接方式。这种广泛采用背…...