【机器视觉------标定篇(二)】三点成圆算法(求相机旋转中心)
应用场景
机器视觉项目应用中,相机安装在机器人上,并且需要定位产品返回坐标偏差以及角度偏差。
与九点标定配合使用,实现精准角度补偿。
算法输入
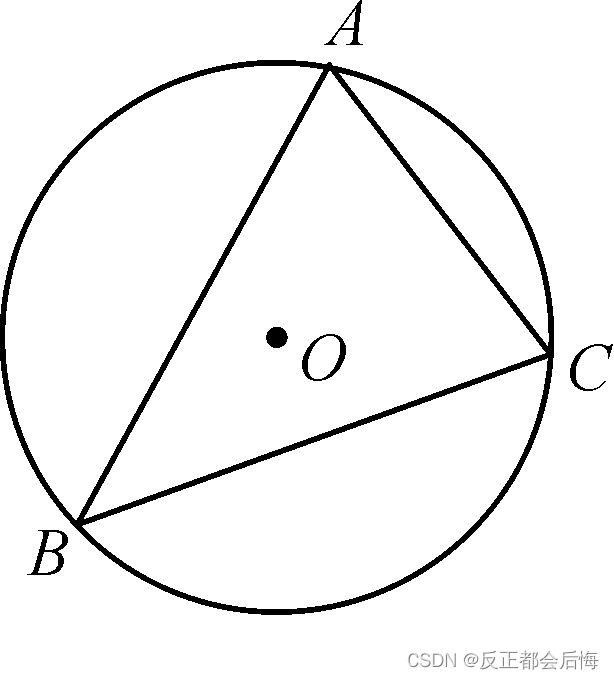
不共线的三点坐标 A(X₁,Y₁) ,B(X₂,Y₂) ,C(X₃,Y₃)
算法原理及实现
原理:
由图可知,线OA=OB=OC=外接圆的半径(r),从三点向【以O点为原点的坐标系】做垂线。由勾股定理可得:
(X - X₀)² + (Y - Y₀)² = r ²
由上式带入三点坐标可的可得:

公式变换可得(由公式①-②,①-③):

由于上公式可得,该式有唯一解的条件为:
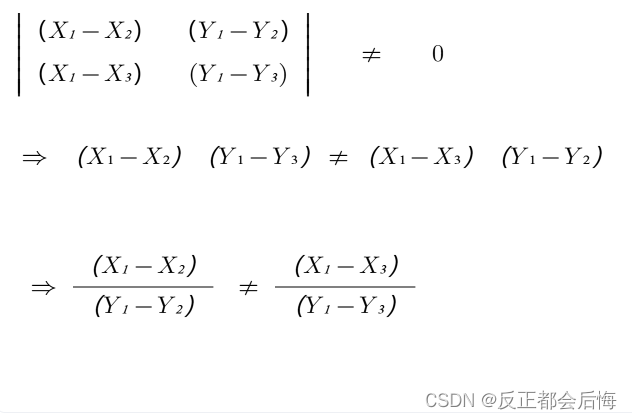
即任两点组成的斜率不能相等,也验证了三点成圆条件:三点不共线。
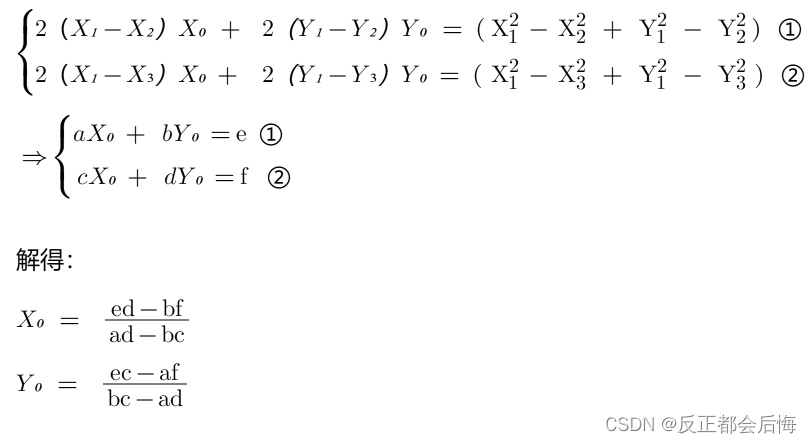
实现:
设:
a = 2(X₁ - X₂)
b = 2(Y₁ - Y₂)
c = 2(X₁ - X₃)
d= 2(Y₁ - Y₃)
e = (X₁)² - (X₂)² + (Y₁)² - (Y₂)²
f = (X₁)² - (X₃)² + (Y₃)² - (Y₃)²
代回方程:
代码实现
public PointF CalculateCicular(PointF px1, PointF px2, PointF px3)
{float x1, y1, x2, y2, x3, y3;float a, b, c, g, e, f, X, Y;x1 = px1.X;y1 = px1.Y;x2 = px2.X;y2 = px2.Y;x3 = px3.X;y3 = px3.Y;a = 2 * (x1 - x2);b = 2 * (y1 - y2);c = 2 * (x1 - x3);d = 2 * (y1 - y3);e = x1 * x1 - x2 * x2 + y1 * y1 - y2 * y2;f = x1 * x1 - x3 * x3 + y1 * y1 - y3 * y3;X = (e * d - b * f) / (a * d - b * c); Y = (e * c - a * f) / (b * c - a * d);//R = (float)Math.Sqrt((X - x1) * (X - x1) + (Y - y1) * (Y - y1)); //半径PointF center = new PointF(X, Y);return center;
}
相关文章:
【机器视觉------标定篇(二)】三点成圆算法(求相机旋转中心)
应用场景 机器视觉项目应用中,相机安装在机器人上,并且需要定位产品返回坐标偏差以及角度偏差。 与九点标定配合使用,实现精准角度补偿。 算法输入 不共线的三点坐标 A(X₁,Y₁) ,B(X₂,Y₂&…...

AUTOSAR E2E详细介绍
E2E概述 E2E(End-To-End)是AUTOSAR为功能安全ISO26262提出的一个安全模块。这里的端(End)并不是指ECU与ECU之间,而是指通信ECU上的SW-C与SW-C之间。 在车载网络中,信息交换通常是从一个ECU发送信号,另一个ECU接收信号。对E2E而言,通常是从源SW-C生成信号,经过RTE(R…...

Dream 主题使用手册 - 基础篇
Dream 主题基于 Halo 博客系统开发,本文将介绍本主题一些功能的使用,文档将持续更新。 一、安装 & 更新 1.1 安装包安装 & 更新 进入主题 Release 界面:https://github.com/nineya/halo-theme-dream/releases 下载主题压缩包 halo…...
WSL下的Kafka开发容器:Docker搭建、API、整合
背景介绍 Kafka是一个分布式流处理平台,可以处理大规模数据流并支持实时数据流的处理。 本文介绍了如何在WSL下使用Docker搭建Kafka容器,并使用Python的kafka-python库和FastAPI框架实现了一个简单的API。同时,还将该服务整合到一个整体的d…...
下载安装)
cv2(OpenCV)下载安装
cv2对应库是OpenCV,官网下载链接:https://www.lfd.uci.edu/~gohlke/pythonlibs/#opencv 最好下载对应python版本的,通过pip命令安装可能会出现版本过高或者过低的问题,导致import cv2没问题,但是内部函数无法调用。 …...

【剑指 offer】旋转数组的最小数字
✨个人主页:bit me👇 ✨当前专栏:算法训练营👇 旋 转 数 组 的 最 小 数 字核心考点:数组理解,二分查找,临界条件 描述: 有一个长度为 n 的非降序数组,比如[1,2,3,4,5]…...

GB 9706.1-2020 医用电气设备第1部分:基本安全和基本性能的通用要求-1
这是份什么文件 这是一份中华人民共和国国家标准,具体为GB9706.1—2020,标准适用于医用电气设备,并规定了医用电气设备基本安全和基本性能的通用要求。主要涵盖了医疗电器设备与患者接触的各种要求,包括电气安全、机械防护、防护辐…...
认识C++《共、枚、指1》
目录 前言: 1.共用体的基本知识 2.匿名共用体 3.枚举 3.1设置枚举值 3.2枚举的应用场景 3.3枚举变量的取值范围 4.地址和自由存储空间 5.指针的思想 6.指针的声明和初始化 前言: 指针内容比较多,还需要再出一篇。久等了!!我看了我的…...

vim 一键配置
PS:本文是为了以后为了方便,做备忘的,今天用的时候找了半天很麻烦。 vim编辑器一键配置 在非root用户下执行上面的语句即可,不要在root用户下直接安装! 安装的时候需要输入root用户的密码,请找您的服主要一…...

如何成为一名成功的 PHP 开发者
当今的网络应用开发市场,PHP 一直是其中最受欢迎的语言之一,许多优秀的网络应用程序都是由 PHP 开发人员设计和开发的。如果你想成为一名成功的 PHP 开发者,以下是几个关键步骤: 1. 学习基础知识 首先,你需要掌握 PH…...
UHD安装教程
UHD Universal Hardware Driver,即USRP驱动。 UHD,Windows平台安装教程 uhd驱动安装 http://files.ettus.com/binaries/misc/erllc_uhd_winusb_driver.zip 安装LibUSBx http://files.ettus.com/binaries/uhd/latest_release 下载默认C盘 环境配置 将…...
Unity和UE有啥区别?哪个更适合游戏开发
游戏制作软件中最著名的两个游戏引擎是 Unity 和 Unreal Engine。从独立游戏到大型工作室,许多游戏开发商都在使用它们。如果你打算从事游戏行业工作,你肯定曾经问过自己“我的游戏应该使用 Unity 还是 Unreal Engine?” ” 让我们来了解和比…...
红队内网靶场
文章目录开篇介绍靶场介绍靶场下载以及配置Tomcat Get Shell突破DMZ防火墙拿下域内成员机器将内网机器上线到CS使用Adfind侦察子域信息控制子域DCRadmin登录子域进行权限维持(白银票据/ACL)子域bloodhound获取父域信息分析子域Krbtgt密钥创建跨域金票Dcsync父域PTH父域DC准备打…...

如何合并多个升序链表?
前言 本文主要介绍如何将多个小的升序链表合并一个大的升序链表。 需求描述 给出K个升序链接,要求把这K个升序链表合并成一个,并且这个链表也是升序的。 例如:A [1,5,6], B [2,3,8], C [4,4,9] 将这3个链表合并成一个链表D…...

23上半年信息系统项目管理师新老教程兼顾使用备考策略
在离考试仅有50多天的时候,软考办发文:“为方便报考信息系统项目管理师的考生进行复习备考,2023年上半年信息系统项目管理师考试第3版、第4版教程兼顾使用”。 其实软考办发布这样一条信息,也是为了照顾那些在新版发布以前按第…...
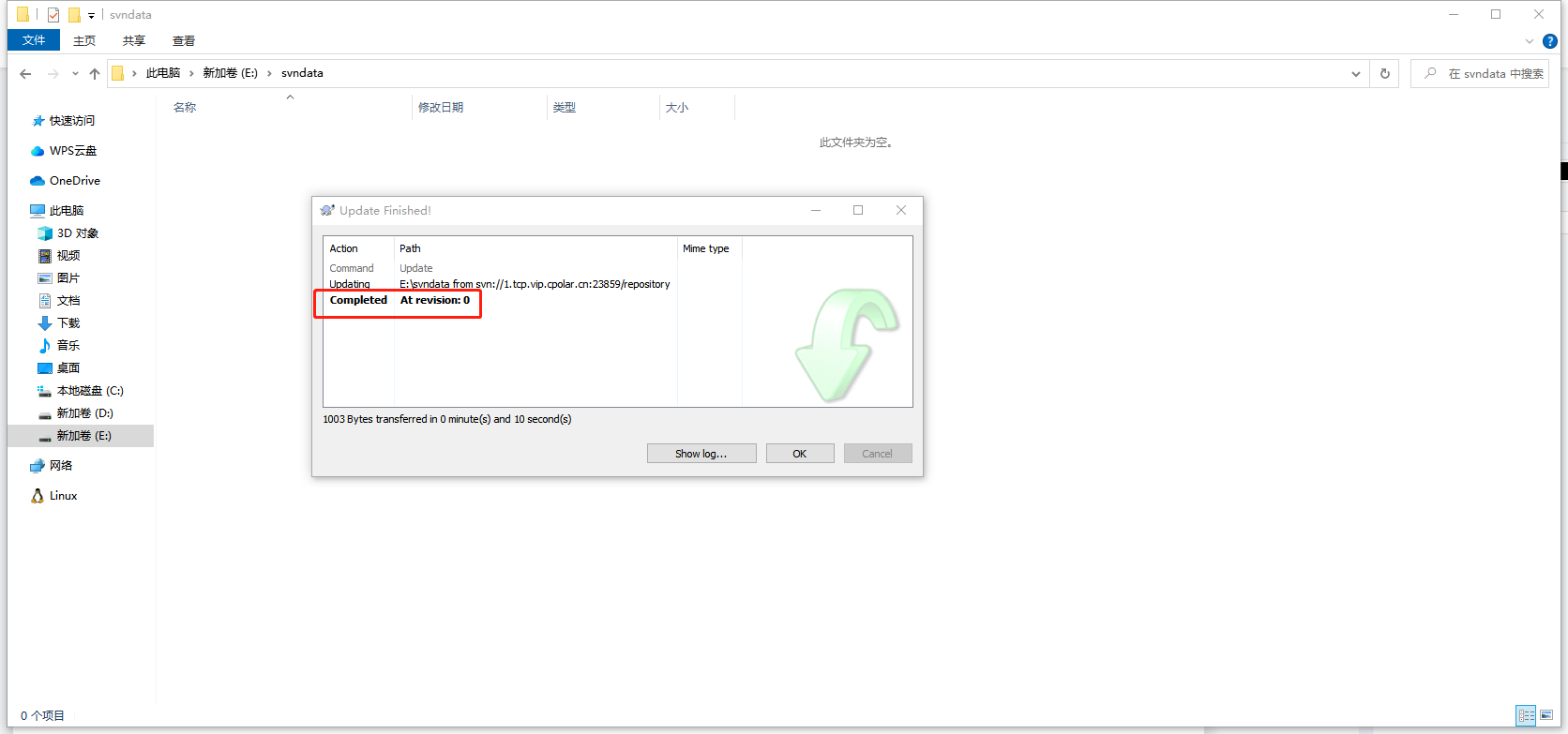
Linux环境搭建SVN服务器并实现公网访问 - cpolar端口映射
文章目录前言1. Ubuntu安装SVN服务2. 修改配置文件2.1 修改svnserve.conf文件2.2 修改passwd文件2.3 修改authz文件3. 启动svn服务4. 内网穿透4.1 安装cpolar内网穿透4.2 创建隧道映射本地端口5. 测试公网访问6. 配置固定公网TCP端口地址6.1 保留一个固定的公网TCP端口地址6.2 …...
)
仿牛客网社区Web开发项目代码逐行精读(更新中)
仿牛客网社区Web开发项目怎么看项目?如何调试项目前瞻技术架构项目亮点开始看代码LoginControllerDiscussPostController怎么看项目? pom.xml看技术架构resource看配置文件,这个项目是前后端不分离的以调试为导向,从前端入手检查…...
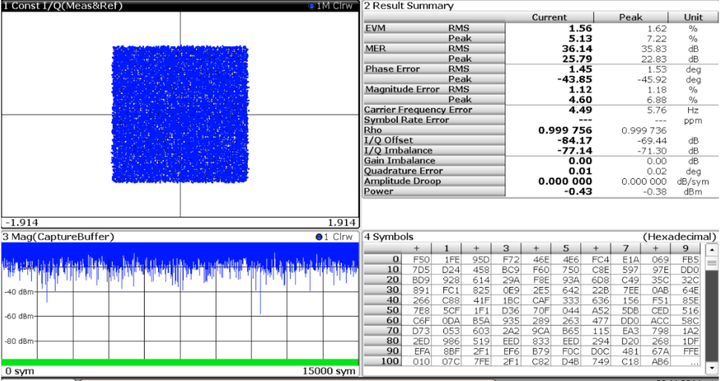
5G NR调制阶数与EVM关系以及对系统SNR要求分析
移动通信技术对数据传输速率要求越来越高。一种提高传输速率的思路是使用更高阶的QAM 调制方式,例如5G NR 的256QAM PDSCH,微波的1024QAM,2048QAM和4096QAM 调制。更高阶的QAM 调制方式对系统也提出了更高的要求。例如某个系统的EVM 测试结果…...
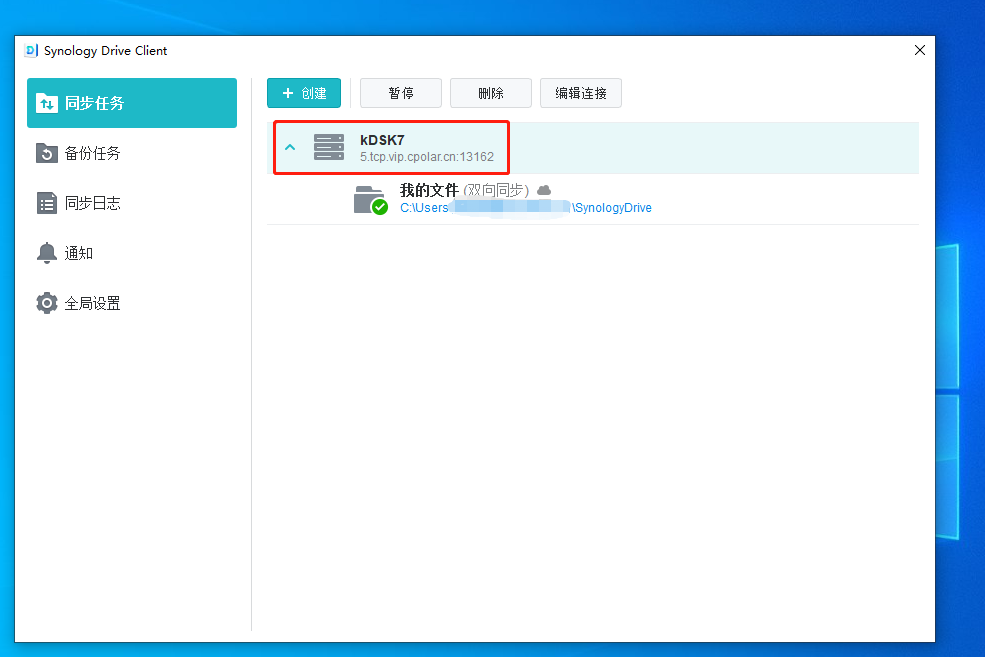
【NAS群晖drive异地访问】远程连接drive挂载电脑硬盘「内网穿透」
文章目录前言1.群晖Synology Drive套件的安装1.1 安装Synology Drive套件1.2 设置Synology Drive套件1.3 局域网内电脑测试和使用2.使用cpolar远程访问内网Synology Drive2.1 Cpolar云端设置2.2 Cpolar本地设置2.3 测试和使用3. 结语转发自CSDN远程穿透的文章:【群晖…...

react:hooks为什么不能写在条件语句里
背景 最近朋友在面试,说面试官问到了一个问题不会,说为什么 react hooks为什么不能写在条件语句里,今天我们来研究一下这个问题。 我们在来简单实现一个 useState: const reRender () > {stateIndex -1 ReactDOM.render(&…...

用NE555和立创EDA做个会‘叮咚’的门铃:从原理图到PCB打板的完整DIY记录
从零打造NE555叮咚门铃:立创EDA全流程实战指南 当电子爱好者第一次尝试将电路图转化为实物时,往往会面临软件操作、元件选型和生产对接的多重挑战。本文将以经典NE555叮咚门铃为例,手把手演示如何用立创EDA完成从原理图设计到PCB打板的完整流…...

告别Resources.Load!Unity动态加载材质资源的最佳实践与性能优化指南
Unity材质资源动态加载:从基础实现到架构级优化方案 在AR涂鸦、实时换装、用户自定义皮肤等现代游戏交互场景中,动态材质加载已成为核心需求。传统Resources.Load虽简单直接,但在大型项目中常引发资源管理混乱、内存泄漏和热更新障碍。本文将…...

ncmdump终极指南:5分钟解锁网易云音乐NCM加密文件
ncmdump终极指南:5分钟解锁网易云音乐NCM加密文件 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾在网易云音乐下载了心爱的歌曲,却发现只能在特定客户端播放?当你想在车载音响、智能音箱…...

告警爆炸,根因定位困难?用DevOps Agent帮你自动查!
随着企业在亚马逊云科技上的工作负载日益复杂——Amazon EC2集群、Amazon RDS数据库、Amazon ECS/EKS容器、Amazon Lambda函数、网络与负载均衡等多种服务交织运行——运维团队面临严峻挑战:告警爆炸:Amazon CloudWatch、第三方监控(Datadog、…...
)
ATmega328P烧录Bootloader报错?别急着换芯片,可能是签名搞的鬼(附avrdude.conf修改教程)
ATmega328P烧录Bootloader报错?别急着换芯片,可能是签名搞的鬼(附avrdude.conf修改教程) 当你兴致勃勃地准备给新买的ATmega328P芯片烧录Bootloader时,突然弹出一串红色报错信息,那种心情就像煮熟的鸭子飞走…...

2026年的专业床垫,从平价到高端究竟该怎么选?
在忙碌的生活中,拥有一张好床垫能显著提升睡眠质量。2026年市场上床垫种类繁多,从平价到高端各有特色,该如何选择呢?下面为大家详细分析。平价床垫:性价比之选平价床垫通常价格亲民,适合预算有限的消费者。…...

告别.osa!用PCL玩转ORB-SLAM3点云地图:保存、加载与二次开发实战
告别.osa!用PCL玩转ORB-SLAM3点云地图:保存、加载与二次开发实战 当ORB-SLAM3完成环境建图后,.osa格式的地图文件就像被锁在保险箱里的宝藏——虽然安全,却难以直接利用。本文将带你突破这一限制,通过PCL(P…...

告别杂音!在RK3588上搞定HDMI音频采集与实时播放的保姆级教程
告别杂音!RK3588 HDMI音频采集与实时播放的终极调优指南 当你在RK3588开发板上调试HDMI音频采集时,是否曾被突如其来的"哒哒"声搞得焦头烂额?这种高频杂音不仅影响用户体验,更可能掩盖音频流的真实质量。本文将带你深入…...

风云三国2.4问鼎天下:不靠作弊代码,用TXT文件修改实现俘虏名将和强制投降
风云三国2.4问鼎天下:TXT文件修改实现俘虏名将与强制投降的硬核技巧 在《风云三国2.4问鼎天下》这款经典MOD中,许多玩家都渴望能够招降那些赫赫有名的武将,比如关羽、诸葛亮等,但游戏机制往往让这些名将难以归顺。传统的作弊代码虽…...

从STM32转战合泰HT32F52352:手把手教你用GPTM定时器搞定四路舵机PWM控制
从STM32到HT32F52352的平滑迁移:GPTM定时器实现四路舵机PWM控制实战 对于习惯了STM32生态的开发者而言,初次接触合泰HT32系列MCU时往往面临两个挑战:如何快速理解新芯片的架构设计,以及如何将已有的STM32开发经验有效迁移。HT32F…...