【ROS2指南-20】了解ROS2组件的用法
在单个进程中组合多个节点
目录
-
背景
-
运行演示
-
发现可用组件
-
使用 ROS 服务 (1.) 与发布者和订阅者的运行时组合
-
使用 ROS 服务 (1.) 与服务器和客户端的运行时组合
-
使用 ROS 服务的编译时组合 (2.)
-
使用 dlopen 的运行时组合
-
使用启动动作组合
-
-
高级主题
-
卸载组件
-
重新映射容器名称和命名空间
-
重新映射组件名称和命名空间
-
-
作为共享库的可组合节点
背景
请参阅概念文章。
运行演示
演示使用来自rclcpp_components、ros2component和组合包的可执行文件,可以使用以下命令运行。
发现可用组件
要查看工作区中已注册和可用的组件,请在 shell 中执行以下命令:
$ ros2 component types compositioncomposition::Talkercomposition::Listenercomposition::Servercomposition::Client
使用 ROS 服务 (1.) 与发布者和订阅者的运行时组合
在第一个 shell 中,启动组件容器:
ros2 run rclcpp_components component_container
ros2通过命令行工具验证容器是否正在运行:
$ ros2 component list /ComponentManager
在第二个 shell 中(参见talker源代码)。该命令将返回加载组件的唯一 ID 以及节点名称。
$ ros2 component load /ComponentManager composition composition::Talker Loaded component 1 into '/ComponentManager' container node as '/talker'
现在,第一个 shell 应该显示一条消息,表明组件已加载,以及用于发布消息的重复消息。
第二个 shell 中的另一个命令(参见监听器源代码):
$ ros2 component load /ComponentManager composition composition::Listener Loaded component 2 into '/ComponentManager' container node as '/listener'
命令行实用程序ros2现在可用于检查容器的状态:
$ ros2 component list /ComponentManager1 /talker2 /listener
现在第一个 shell 应该显示每条接收到的消息的重复输出。
使用 ROS 服务 (1.) 与服务器和客户端的运行时组合
服务器和客户端的示例非常相似。
在第一个外壳中:
ros2 run rclcpp_components component_container
在第二个 shell 中(参见服务器和客户端源代码):
ros2 component load /ComponentManager composition composition::Server ros2 component load /ComponentManager composition composition::Client
在这种情况下,客户端向服务器发送请求,服务器处理请求并回复响应,客户端打印收到的响应。
使用 ROS 服务的编译时组合 (2.)
该演示表明可以重复使用相同的共享库来编译运行多个组件的单个可执行文件。可执行文件包含上面的所有四个组件:说话者和听众以及服务器和客户端。
在 shell 调用中(参见源代码):
ros2 run composition manual_composition
这应该显示来自双方的重复消息,说话者和听众以及服务器和客户端。
笔记
手动组合的组件不会反映在命令行工具输出中。ros2 component list
使用 dlopen 的运行时组合
该演示通过创建通用容器进程并显式传递要加载的库而不使用 ROS 接口来提供 1. 的替代方法。该过程将打开每个库并在库源代码中为每个“rclcpp::Node”类创建一个实例)。
ros2 run composition dlopen_composition `ros2 pkg prefix composition`/lib/libtalker_component.so `ros2 pkg prefix composition`/lib/liblistener_component.so
现在 shell 应该显示每条发送和接收消息的重复输出。
笔记
dlopen 组合的组件不会反映在命令行工具输出中。ros2 component list
使用启动动作组合
虽然命令行工具对于调试和诊断组件配置很有用,但同时启动一组组件通常更方便。要自动执行此操作,我们可以使用 中的功能。ros2 launch
ros2 launch composition composition_demo.launch.py
高级主题
现在我们已经了解了组件的基本操作,我们可以讨论一些更高级的主题。
卸载组件
在第一个 shell 中,启动组件容器:
ros2 run rclcpp_components component_container
ros2通过命令行工具验证容器是否正在运行:
$ ros2 component list /ComponentManager
在第二个 shell 中(参见talker源代码)。该命令将返回加载组件的唯一 ID 以及节点名称。
$ ros2 component load /ComponentManager composition composition::Talker Loaded component 1 into '/ComponentManager' container node as '/talker' $ ros2 component load /ComponentManager composition composition::Listener Loaded component 2 into '/ComponentManager' container node as '/listener'
使用唯一 ID 从组件容器中卸载节点。
$ ros2 component unload /ComponentManager 1 2 Unloaded component 1 from '/ComponentManager' container Unloaded component 2 from '/ComponentManager' container
在第一个 shell 中,验证来自 talker 和 listener 的重复消息是否已停止。
重新映射容器名称和命名空间
组件管理器名称和命名空间可以通过标准命令行参数重新映射:
ros2 run rclcpp_components component_container --ros-args -r __node:=MyContainer -r __ns:=/ns
在第二个 shell 中,可以使用更新后的容器名称加载组件:
ros2 component load /ns/MyContainer composition composition::Listener
笔记
Namespace remappings of the container do not affect loaded components.
Remap component names and namespaces
Component names and namespaces may be adjusted via arguments to the load command.
In the first shell, start the component container:
ros2 run rclcpp_components component_container
Some examples of how to remap names and namespaces:
# Remap node name ros2 component load /ComponentManager composition composition::Talker --node-name talker2 # Remap namespace ros2 component load /ComponentManager composition composition::Talker --node-namespace /ns # Remap both ros2 component load /ComponentManager composition composition::Talker --node-name talker3 --node-namespace /ns2
The corresponding entries appear in ros2 component list:
$ ros2 component list /ComponentManager1 /talker22 /ns/talker3 /ns2/talker3
Note
Namespace remappings of the container do not affect loaded components.
相关文章:

【ROS2指南-20】了解ROS2组件的用法
在单个进程中组合多个节点 目录 背景 运行演示 发现可用组件 使用 ROS 服务 (1.) 与发布者和订阅者的运行时组合 使用 ROS 服务 (1.) 与服务器和客户端的运行时组合 使用 ROS 服务的编译时组合 (2.) 使用 dlopen 的运行时组合 使用启动动作组合 高级主题 卸载组件 重新…...

使用AI进行“文本纠错”
AI在现实中的应用有很多,你有没有想过,它还可以进行文本纠错呢?传统的校对既耗时又枯燥,通过“AI纠错”,不仅能更快完成,还能提高准确度。那么AI“文本纠错”背后的原理是什么呢?和我一起看看吧…...

第九章 法律责任与法律制裁
第九章 法律责任与法律制裁_副本 目录 第一节 法律责任的概念 一 法律责任的含义二 法律责任的特点 第二节 法律责任的分类与竞合 一 法律责任的分类 (一)根据责任行为所违反的法律的性质 民事责任:刑事责任行政责任违宪责任 (二…...

如何选择好用的海康视频恢复软件?综合考虑这几点
海康视频恢复通常是指从海康威视监控设备中恢复删除或丢失的视频。在使用海康设备进行监控时,一些重要的视频可能会被误删除或其他原因导致丢失,如果没有及时备份,数据就可能会“永久”丢失?其实不然,我们可以选择好用…...
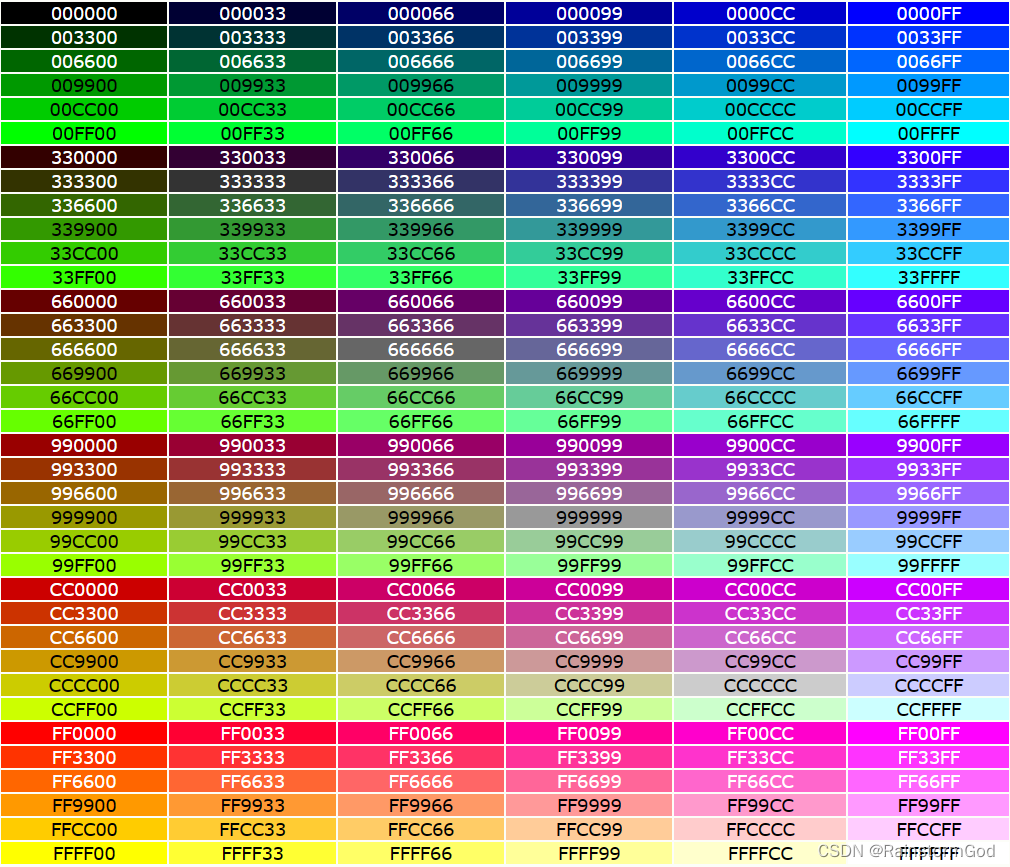
前端学习:HTML颜色(什么是RGB、HEX、HSL)
一、什么是RGB、HEX、HSL? 无论是RGB、HEX、HSL,它们的作用只有一个:用数字表达出一种颜色。 1.RGB RGB通过输入的数值,将红色、绿色和蓝色的光源以一定的量混合在一起,形成颜色。 软件中通常让你输入Red、Green、B…...
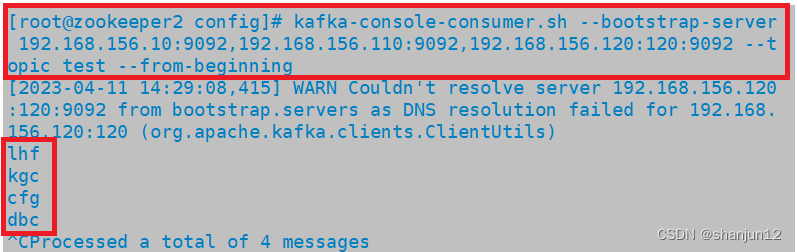
zookeeper + kafka集群搭建详解
目录 1.消息队列介绍 1.为什么需要消息队列 (MO) 2.使用消息队列的好处 3.消息队列的两种模式 2.Kafka相关介绍 1.Kafka定义 2.Kafka简介 3. Kafka的特性 3.Kafka系统架构 1. Broker(服务器) 2. Topic(一个队…...

【数据结构与算法】 - 双向链表 - 详细实现思路及代码
目录 一、概述 二、双向链表 三、双向链表实现步骤 📌3.1 C语言定义双向链表结点 📌3.2 双向链表初始化 📌3.3 双向链表插入数据 📌3.4 双向链表删除数据 📌3.5 双向链表查找数据 📌3.6 双向链…...

面试官在线点评4份留学生简历! 这些坑你中了几个?如何写项目描述才能被大厂发面试?转专业简历该咋写 | 还有优秀简历展示!
我们给大家展示一下 从材料的准备 也就是说到底包含哪些具体的项目 为什么说这些项目是不错的 第二呢就是说在陈述上 在整个这个简历的结构 他的完备性他的准确性 他的正确性 以及最后他的具体的这种项目的描述 那讲完了这个好的简历呢 我们另外搜集了几份简历 那这些简历呢其实…...

一觉醒后ChatGPT 被淘汰了
OpenAI 的 Andrej Karpathy 都大力宣传,认为 AutoGPT 是 prompt 工程的下一个前沿。 近日,AI 界貌似出现了一种新的趋势:自主人工智能。 这不是空穴来风,最近一个名为 AutoGPT 的研究开始走进大众视野。特斯拉前 AI 总监、刚刚回归…...

spring框架的事务
1.什么是事务? 事务:是数据库操作的最小工作单元,是作为单个逻辑工作单元执行的一系列操作;这些操作作为一个整体一起向系统提交,要么都执行、要么都不执行;事务是一组不可再分割的操作集合(工作逻辑单元…...

Spring配置数据源
Spring配置数据源数据源的作用环境准备手动创建c3p0数据源封装抽取关键信息,手动创建c3p0数据源使用Spring容器配置数据源数据源的作用 数据源(连接池)是提高程序性能如出现的 事先实例化数据源,初始化部分连接资源 使用连接资源时从数据源中获取 使用完…...
【前端之旅】Vue入门笔记
一名软件工程专业学生的前端之旅,记录自己对三件套(HTML、CSS、JavaScript)、Jquery、Ajax、Axios、Bootstrap、Node.js、Vue、小程序开发(Uniapp)以及各种UI组件库、前端框架的学习。 【前端之旅】Web基础与开发工具 【前端之旅】手把手教你安装VS Code并附上超实用插件…...
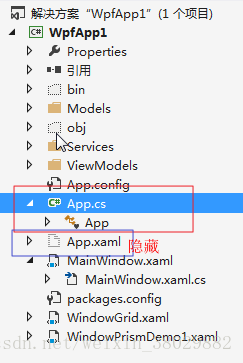
WPF教程(二)--Application WPF程序启动方式
1.Application介绍 WPF与WinForm一样有一个 Application对象来进行一些全局的行为和操作,并且每个 Domain (应用程序域)中仅且只有一个 Application 实例存在。和 WinForm 不同的是WPF Application默认由两部分组成 : App.xaml 和 App.xaml.…...

snmp 自定义子代理mib库
测试环境:centos8 1、安装软件 yum install -y net-snmp net-snmp-utils yum install -y net-snmp-perl net-snmp-devel net-snmp-libs 2、创建用户 net-snmp-create-v3-user 输入用户名 soft 输入密码 123456 输入密码 654321 service snmpd restart 3、创建…...

一文说透安全沙箱技术
在数字经济的东风中,数据安全至关重要。目前已经颁布了包括《数据安全法》、《个人信息保护法》和《数据安全管理办法》在内的国家政策,以促进整个数据要素的发展。 而近年来,随着移动应用程序的普及和小程序技术的崛起,安全沙箱…...
)
Java多线程基础面试总结(二)
创建三种线程的方式对比 使用实现Runnable、Callable接口的方式创建多线程。 优势 Java的设计是单继承的设计,如果使用继承Thread的方式实现多线程,则不能继承其他的类,而如果使用实现Runnable接口或Callable接口的方式实现多线程…...

NS32F407VGT6 NS32F407VET6软硬件通用STM32F407VGT6 407VET6
NS32F407VGT6 NS32F407VET6 器件基于高性能的 ARM Cortex-M4 32 位 RISC 内核,工作频率高达 168MHz 。 Cortex-M4 内核带有单精度浮点运算单元 (FPU) ,支持所有 ARM 单精度数据处理指令和数据类型。它还 具有一组 DSP 指令和提高应用安全性的一…...

Openstack: network: ovs: dpif/show 实例分析:interface
[TOC 实例 [cbis-adminovercloud–13 (overcloudrc) ~]$ sudo ovs-appctl dpif/show systemovs-system: hit:75198007884 missed:109924265 br-ex: br-ex 65534/3: (internal) ,65534 是port number; OpenFlow port number; 3 是 ofp_port_to_odp_port(ofproto, o…...

必要的项目管理软件因素
什么样的项目管理软件好?对于一个项目团队来说,从项目开始到项目结束,需要多个部门的配合。每个成员可能会参与一个以上的项目,这通常需要并行的多个项目。据介绍,国外90%以上的项目是用软件管理的,而中国只…...

大学刚毕业,用10000小时,走进字节跳动拿了offer
前言: 没有绝对的天才,只有持续不断的付出。对于我们每一个平凡人来说,改变命运只能依靠努力幸运,但如果你不够幸运,那就只能拉高努力的占比。 2020年7月,我有幸成为了字节跳动的一名测试开发,…...

从‘梳子’到‘低通’:图解CIC滤波器在5G和软件无线电里的那些事儿
从‘梳子’到‘低通’:图解CIC滤波器在5G和软件无线电里的那些事儿 在5G毫米波基站和软件无线电设备中,高速ADC采样产生的数据洪流就像未经处理的原油,而CIC滤波器正是第一道精炼装置。这种没有乘法器的奇特滤波器,凭借积分器和梳…...

2026年制造业员工入转调离全流程自动化趋势?——从“系统孤岛”到“Agent全闭环”的效能革命
2026年,全球制造业正处于从“设备自动化”向“组织智能化”跨越的关键拐点。 随着人口红利消退与用工结构性矛盾加剧,工厂对于人力资源的精准配置已不仅是行政命题,而是直接影响产线柔性与交付周期的核心生产力命题。 传统的HR管理模式在面对…...

构建多模型备援策略以提升企业级 AI 应用可靠性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 构建多模型备援策略以提升企业级 AI 应用可靠性 在构建企业级 AI 应用时,服务的稳定性与可靠性是核心考量之一。单一模…...

Solidworks 2018+ 机器人模型避坑指南:用SW2URDF插件导出URDF,再导入Webots R2023a完整流程
SolidWorks 2018机器人模型导入Webots全流程避坑指南 在机器人仿真领域,将SolidWorks设计的机械模型准确导入Webots仿真环境是一个关键但充满挑战的环节。许多工程师和学生在初次尝试这一流程时,往往会在版本兼容性、文件路径、坐标系设置等环节遭遇各种…...

词达人自动化助手终极指南:10倍效率解放你的英语学习时间
词达人自动化助手终极指南:10倍效率解放你的英语学习时间 【免费下载链接】cdr 微信词达人,高正确率,高效简洁。支持班级任务及自选任务 项目地址: https://gitcode.com/gh_mirrors/cd/cdr 核心关键词:词达人自动化助手、P…...

Pandas 数据清洗与分析
第一部分:水果销售分析(入门篇)首先,我们有一个简单的水果销售列表。我们的任务是算出每种水果的总销量,以及每天的销售明细。1. 数据准备我们先造一点数据:import pandas as pd import numpy as npdata {…...

在Node.js后端服务中集成Taotoken实现稳定高效的多模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Node.js后端服务中集成Taotoken实现稳定高效的多模型调用 对于需要构建AI功能的后端开发者而言,直接对接多个模型厂商…...

信步SV1a-13714P嵌入式主板拆解:工业边缘计算硬件选型与实战部署指南
1. 项目概述:一块嵌入式主板的深度拆解最近在整理一个工业边缘计算的项目资料,翻出了几块之前用过的“信步科技SV1a-13714P”嵌入式主板。这块板子虽然不是什么新潮的玩意儿,但在特定的工业场景里,它就像一颗“定心丸”࿰…...
)
告别点灯:用STM32+FPGA+FSMC做个数据吞吐测试仪(附Quartus与标准库工程)
STM32与FPGA联袂打造:高性能数据吞吐测试仪实战指南 在嵌入式系统开发中,总线通信性能往往是决定整体系统响应速度的关键瓶颈。对于硬件爱好者、电子工程师和学生群体而言,如何直观测量和优化总线传输效率,是一个既具挑战性又充满…...

Rdkit实战:从2D到3D,解锁分子构象生成与优化的全流程
1. 从2D到3D:分子构象生成的基础概念 第一次接触分子构象生成时,我完全被各种术语搞晕了——距离几何、ETKDG、MMFF这些名词听起来就像天书。直到用RDKit实际操作了几次,才发现这个过程其实就像搭积木:先有个平面设计图ÿ…...