【Linux 裸机篇(四)】I.MX6ULL C语言 LED 驱动
文章目录
- 一、汇编搭建 C 语言环境
- 二、C 语言编写
- 三、编写 Makefile
- 四、链接脚本
一、汇编搭建 C 语言环境
实际工作中是很少用到汇编去写嵌入式驱动的,大部分情况下都是使用 C 语言去编写的。只是在开始部分用汇编来初始化一下 C 语言环境,比如初始化 DDR、设置堆栈指针 SP 等等,当这些工作都做完以后就可以进入 C 语言环境,也就是运行 C 语言代码,一般都是进入 main 函数。
1 .global _start /* 全局标号 */
2
3
4 /* 描述: _start 函数,程序从此函数开始执行,此函数主要功能是设置 C 运行环境。*/
5
6
7 _start:
8
9 /* 进入 SVC 模式 */
10 mrs r0, cpsr
11 bic r0, r0, #0x1f /* 将 r0 的低 5 位清零,也就是 cpsr 的 M0~M4 */
12 orr r0, r0, #0x13 /* r0 或上 0x13,表示使用 SVC 模式 */
13 msr cpsr, r0 /* 将 r0 的数据写入到 cpsr_c 中 */
14
15 ldr sp, =0X80200000 /* 设置栈指针 */
16 b main /* 跳转到 main 函数 */
第 1 行定义了一个全局标号_start。
第 7 行就是标号_start 开始的地方,相当于是一个_start 函数,这个_start 就是第一行代码。
第 10~13 行就是设置处理器进入 SVC 模式,处理器模式的设置是通过修改 CPSR(程序状态)寄存器来完成的,其中 M[4:0](CPSR 的 bit[4:0])就是设置处理器运行模式的,如果要将处理器设置为 SVC 模式,那么 M[4:0]就要等于 0X13。11~13 行代码就是先使用指令 MRS 将 CPSR寄存器的值读取到 R0 中,然后修改 R0 中的值,设置 R0 的 bit[4:0]为 0X13,然后再使用指令MSR 将修改后的 R0 重新写入到 CPSR 中。
第 15 行通过 ldr 指令设置 SVC 模式下的 SP 指针=0X80200000,因为 I.MX6U-ALPHA 开发 板 上 的 DDR3 地 址 范 围 是 0X80000000~0XA0000000(512MB) 或 者0X80000000~0X90000000(256MB),不管是 512MB 版本还是 256MB 版本的,其 DDR3 起始地址都是 0X80000000。由于 Cortex-A7 的堆栈是向下增长的,所以将 SP 指针设置为 0X80200000,因此 SVC 模式的栈大小 0X80200000-0X80000000=0X200000=2MB, 2MB 的栈空间已经很大了,如果做裸机开发的话绰绰有余。
第 16 行就是跳转到 main 函数, main 函数就是 C 语言代码了。
总结:设置处理器运行到 SVC 模式下、然后初始化 SP 指针、最终跳转到 C 文件的 main 函数中。
二、C 语言编写
main.h
#ifndef __MAIN_H
#define __MAIN_H/*
* CCM 相关寄存器地址
*/
#define CCM_CCGR0 *((volatile unsigned int *)0X020C4068)
#define CCM_CCGR1 *((volatile unsigned int *)0X020C406C)
#define CCM_CCGR2 *((volatile unsigned int *)0X020C4070)
#define CCM_CCGR3 *((volatile unsigned int *)0X020C4074)
#define CCM_CCGR4 *((volatile unsigned int *)0X020C4078)
#define CCM_CCGR5 *((volatile unsigned int *)0X020C407C)
#define CCM_CCGR6 *((volatile unsigned int *)0X020C4080)#endif
main.c
#include "main.h"//使能 I.MX6U 所有外设时钟
void clk_enable(void)
{CCM_CCGR0 = 0xffffffff;CCM_CCGR1 = 0xffffffff;CCM_CCGR2 = 0xffffffff;CCM_CCGR3 = 0xffffffff;CCM_CCGR4 = 0xffffffff;CCM_CCGR5 = 0xffffffff;CCM_CCGR6 = 0xffffffff;
}//初始化 LED 对应的 GPIO
void led_init(void)
{/* 1、初始化 IO 复用, 复用为 GPIO1_IO03 */SW_MUX_GPIO1_IO03 = 0x5;/* 2、配置 GPIO1_IO03 的 IO 属性*bit 16:0 HYS 关闭*bit [15:14]: 00 默认下拉*bit [13]: 0 kepper 功能*bit [12]: 1 pull/keeper 使能*bit [11]: 0 关闭开路输出*bit [7:6]: 10 速度 100Mhz*bit [5:3]: 110 R0/6 驱动能力*bit [0]: 0 低转换率*/SW_PAD_GPIO1_IO03 = 0X10B0;/* 3、初始化 GPIO, GPIO1_IO03 设置为输出 */GPIO1_GDIR = 0X0000008;/* 4、设置 GPIO1_IO03 输出低电平,打开 LED0 */GPIO1_DR = 0X0;
}//打开 LED 灯
void led_on(void)
{/** 将 GPIO1_DR 的 bit3 清零*/GPIO1_DR &= ~(1<<3);
}//关闭 LED 灯
void led_off(void)
{/** 将 GPIO1_DR 的 bit3 置 1*/GPIO1_DR |= (1<<3);
}/** @description : 短时间延时函数
* @param - n : 要延时循环次数(空操作循环次数,模式延时)
* @return : 无
*/
void delay_short(volatile unsigned int n)
{while(n--){}
}/*
* @description : 延时函数,在 396Mhz 的主频下延时时间大约为 1ms
* @param - n : 要延时的 ms 数
* @return : 无
*/
void delay(volatile unsigned int n)
{while(n--){elay_short(0x7ff);}
}/** @description : main 函数* @param : 无* @return : 无*/
int main(void)
{clk_enable(); /* 使能所有的时钟 */led_init(); /* 初始化 led */while(1) /* 死循环 */{led_off(); /* 关闭 LED */delay(500); /* 延时大约 500ms */led_on(); /* 打开 LED */delay(500); /* 延时大约 500ms */}return 0;
}
三、编写 Makefile
1 objs := start.o main.o
2
3 ledc.bin:$(objs)
4 arm-linux-gnueabihf-ld -Ttext 0X87800000 -o ledc.elf $^
5 arm-linux-gnueabihf-objcopy -O binary -S ledc.elf $@
6 arm-linux-gnueabihf-objdump -D -m arm ledc.elf > ledc.dis
7
8 %.o:%.s
9 arm-linux-gnueabihf-gcc -Wall -nostdlib -c -o $@ $<
10
11 %.o:%.S
12 arm-linux-gnueabihf-gcc -Wall -nostdlib -c -o $@ $<
13
14 %.o:%.c
15 arm-linux-gnueabihf-gcc -Wall -nostdlib -c -o $@ $<
16
17 clean:
18 rm -rf *.o ledc.bin ledc.elf ledc.dis
第 1 行定义了一个变量 objs, objs 包含着要生成 ledc.bin 所需的材料: start.o 和 main.o,也就是当前工程下的 start.s 和 main.c 这两个文件编译后的.o 文件。这里要注意 start.o 一定要放到最前面!因为在后面链接的时候 start.o 要在最前面,因为 start.o 是最先要执行的文件!
第 3 行就是默认目标,目的是生成最终的可执行文件 ledc.bin, ledc.bin 依赖 start.o 和 main.o如果当前工程没有 start.o 和 main.o 的时候就会找到相应的规则去生成 start.o 和 main.o。比如 start.o 是 start.s 文件编译生成的,因此会执行第 8 行的规则。
第 4 行是使用 arm-linux-gnueabihf-ld 进行链接,链接起始地址是 0X87800000,但是这一行用到了自动变量“$”,“$”的意思是所有依赖文件的集合,在这里就是 objs 这个变量的值:start.o 和 main.o。链接的时候 start.o 要链接到最前面,因为第一行代码就是 start.o 里面的,因此这一行就相当于:
arm-linux-gnueabihf-ld -Ttext 0X87800000 -o ledc.elf start.o main.o
第 5 行使用 arm-linux-gnueabihf-objcopy 来将 ledc.elf 文件转为 ledc.bin,本行也用到了自动变量“$@”,“$@”的意思是目标集合,在这里就是“ledc.bin”,那么本行就相当于:
arm-linux-gnueabihf-objcopy -O binary -S ledc.elf ledc.bin
第 6 行使用 arm-linux-gnueabihf-objdump 来反汇编,生成 ledc.dis 文件。
第 8~15 行就是针对不同的文件类型将其编译成对应的.o 文件,其实就是汇编.s(.S)和.c 文件,比如 start.s 就会使用第 8 行的规则来生成对应的 start.o 文件。第 9 行就是具体的命令,这行也用到了自动变量“$@”和“$<”,其中“$<”的意思是依赖目标集合的第一个文件。比如start.s 要编译成 start.o 的话第 8 行和第 9 行就相当于:
start.o:start.sarm-linux-gnueabihf-gcc -Wall -nostdlib -c -O2 -o start.o start.s
第 17 行就是工程清理规则,通过命令“make clean”就可以清理工程。
四、链接脚本
在上面的 Makefile 中我们链接代码的时候使用如下语句:
arm-linux-gnueabihf-ld -Ttext 0X87800000 -o ledc.elf $^
上面语句中我们是通过“-Ttext”来指定链接地址是 0X87800000 的,这样的话所有的文件都会链接到以 0X87800000 为起始地址的区域。但是有时候我们很多文件需要链接到指定的区域,或者叫做段里面,比如在 Linux 里面初始化函数就会放到 init 段里面。因此我们需要能够自定义一些段,这些段的起始地址我们可以自由指定,同样的我们也可以指定一个文件或者函数应该存放到哪个段里面去。要完成这个功能我们就需要使用到链接脚本,看名字就知道链接脚本主要用于链接的,用于描述文件应该如何被链接在一起形成最终的可执行文件。其主要目的是描述输入文件中的段如何被映射到输出文件中,并且控制输出文件中的内存排布。比如我们编译生成的文件一般都包含 text 段、 data 段等等。
链接脚本的语法很简单,就是编写一系列的命令,这些命令组成了链接脚本,每个命令是一个带有参数的关键字或者一个对符号的赋值,可以使用分号分隔命令。像文件名之类的字符串可以直接键入,也可以使用通配符“*”。最简单的链接脚本可以只包含一个命令“SECTIONS”,我们可以在这一个“SECTIONS”里面来描述输出文件的内存布局。我们一般编译出来的代码都包含在 text、 data、 bss 和 rodata 这四个段内,假设现在的代码要被链接到 0X10000000 这个地址,数据要被链接到 0X30000000 这个地方,下面就是完成此功能的最简单的链接脚本:
SECTIONS{. = 0X10000000;.text : {*(.text)}. = 0X30000000;.data ALIGN(4) : { *(.data) }.bss ALIGN(4) : { *(.bss) }
}
第 1 行我们先写了一个关键字“SECTIONS”,后面跟了一个大括号,这个大括号和第 7 行的大括号是一对,这是必须的。看起来就跟 C 语言里面的函数一样。
第 2 行对一个特殊符号“.”进行赋值,“.”在链接脚本里面叫做定位计数器,默认的定位计数器为 0。我们要求代码链接到以 0X10000000 为起始地址的地方,因此这一行给“.”赋值0X10000000,表示以 0X10000000 开始,后面的文件或者段都会以 0X10000000 为起始地址开始链接。
第 3 行的“.text”是段名,后面的冒号是语法要求,冒号后面的大括号里面可以填上要链接到“.text”这个段里面的所有文件,“(.text)”中的“”是通配符,表示所有输入文件的.text段都放到“.text”中。
第 4 行,我们的要求是数据放到 0X30000000 开始的地方,所以我们需要重新设置定位计数器“.”,将其改为 0X30000000。如果不重新设置的话会怎么样?假设“.text”段大小为 0X10000,那么接下来的.data 段开始地址就是 0X10000000+0X10000=0X10010000,这明显不符合我们的要求。所以我们必须调整定位计数器为 0X30000000。
第 5 行跟第 3 行一样,定义了一个名为“.data”的段,然后所有文件的“.data”段都放到这里面。但是这一行多了一个“ALIGN(4)”,这是什么意思呢?这是用来对“.data”这个段的起始地址做字节对齐的, ALIGN(4)表示 4 字节对齐。也就是说段“.data”的起始地址要能被 4 整除,一般常见的都是 ALIGN(4)或者 ALIGN(8),也就是 4 字节或者 8 字节对齐。
第 6 行定义了一个“.bss”段,所有文件中的“.bss”数据都会被放到这个里面,“.bss”数据就是那些定义了但是没有被初始化的变量。
上面就是链接脚本最基本的语法格式,我们接下来就按照这个基本的语法格式来编写我们本试验的链接脚本,我们本试验的链接脚本要求如下:
- 链接起始地址为 0X87800000。
- start.o 要被链接到最开始的地方,因为 start.o 里面包含这第一个要执行的命令。
在 Makefile 同目录下新建一个名为“imx6ul.lds”的文件,然后在此文件里面输入如下所示代码:
1 SECTIONS{
2 . = 0X87800000;
3 .text :
4 {
5 start.o
6 main.o
7 *(.text)
8 }
9 .rodata ALIGN(4) : {*(.rodata*)}
10 .data ALIGN(4) : { *(.data) }
11 __bss_start = .;
12 .bss ALIGN(4) : { *(.bss) *(COMMON) }
13 __bss_end = .;
14 }
第 2 行设置定位计数器为0X87800000,因为我们的链接地址就是0X87800000。第5行设置链接到开始位置的文件为start.o,因为 start.o 里面包含着第一个要执行的指令,所以一定要链接到最开始的地方。第 6 行是 main.o这个文件,其实可以不用写出来,因为 main.o 的位置就无所谓了,可以由编译器自行决定链接位置。在第 11、 13 行有“__bss_start”和“__bss_end”这两个东西?这个是什么呢?“__bss_start”和“__bss_end”是符号,第 11、 13 这两行其实就是对这两个符号进行赋值,其值为定位符“.”,这两个符号用来保存.bss 段的起始地址和结束地址。前面说了.bss 段是定义了但是没有被初始化的变量,我们需要手动对.bss 段的变量清零的,因此我们需要知道.bss 段的起始和结束地址,这样我们直接对这段内存赋 0 即可完成清零。通过第 11、 13 行代码, .bss 段的起始地址和结束地址就保存在了“__bss_start”和“__bss_end”中,我们就可以直接在汇编或者 C 文件里面使用这两个符号。
编写好链接脚本文件: imx6ul.lds,我们肯定是要使用这个链接脚本文件的,将 Makefile 中的如下一行代码:
arm-linux-gnueabihf-ld -Ttext 0X87800000 -o ledc.elf $^
改为:
arm-linux-gnueabihf-ld -Timx6ul.lds -o ledc.elf $^
相关文章:
】I.MX6ULL C语言 LED 驱动)
【Linux 裸机篇(四)】I.MX6ULL C语言 LED 驱动
文章目录 一、汇编搭建 C 语言环境二、C 语言编写三、编写 Makefile四、链接脚本 一、汇编搭建 C 语言环境 实际工作中是很少用到汇编去写嵌入式驱动的,大部分情况下都是使用 C 语言去编写的。只是在开始部分用汇编来初始化一下 C 语言环境,比如初始化 D…...

我也曾经因安装库而抓狂,直到我遇到了
入门教程、案例源码、学习资料、读者群 请访问: python666.cn 大家好,欢迎来到 Crossin的编程教室 ! 几乎所有的 Python 学习者都遇到过“安装”方面的问题。这些安装问题包括 Python 自身环境的安装、第三方模块的安装、不同版本的切换&…...

DDPG算法详解
DQN算法详解 一.概述 概括来说,RL要解决的问题是:让agent学习在一个环境中的如何行为动作(act), 从而获得最大的奖励值总和(total reward)。 这个奖励值一般与agent定义的任务目标关联。 agent需要的主要学习内容:第一是行为策略…...
继续学c++
由于c里面有很多和c语言很像的东西,这里就来总结一点不像的或者要注意的,或者是我已经快忘记的; 先来一个浮点型也就是实型类型的总结; 知道浮点型有这两个类型:float和double型; 然后float型占四个字节…...
Day949.遗留系统之殇:为什么要对遗留系统进行现代化? -遗留系统现代化实战
遗留系统之殇:为什么要对遗留系统进行现代化? Hi,我是阿昌,今天学习记录是关于遗留系统之殇:为什么要对遗留系统进行现代化?的内容。 不知道你是否跟曾经一样,身处一个遗留系统的漩涡之中&…...

DAY 45 Nginx服务配置
Nginx概述 Nginx: Nginx 是开源、高性能、高可靠的 Web 和反向代理服务器,而且支持热部署,几乎可以做到 7 * 24 小时不间断运行,即使运行几个月也不需要重新启动,还能在不间断服务的情况下对软件版本进行热更新。 对…...

如何收集K8S容器化部署的服务的日志?
做开发的同学都知道日志的重要性,日志的种类一般有接口日志、错误日志、关键步骤日志、用户操作日志等。本文主要详细讲解使用kubernetes容器化部署的服务该如何记录和收集日志。 一、使用标准输出方式 将想要记录的日志内容输出到stdout或stderr即可(…...

python删除csv文件中的某几列或行
1. 读取数据 用pandas中的read_csv()函数读取出csv文件中的数据: import pandas as pddf pd.read_csv("comments.csv") df.head(2)用drop函数进行文件中数据的删除行或者删除列操作。 2. 删除列操作 方法一:假设我们要删除的列的名称为 ‘观众ID’,‘…...
Redis持久化机制导致服务自启动后恢复数据过长无法使用以及如何关闭
场景 若依前后端分离版手把手教你本地搭建环境并运行项目: 若依前后端分离版手把手教你本地搭建环境并运行项目_霸道流氓气质的博客-CSDN博客 在上面搭建前后端分离的项目后,如果需要在windows服务上进行部署。 若依前后端分离版本,Windo…...
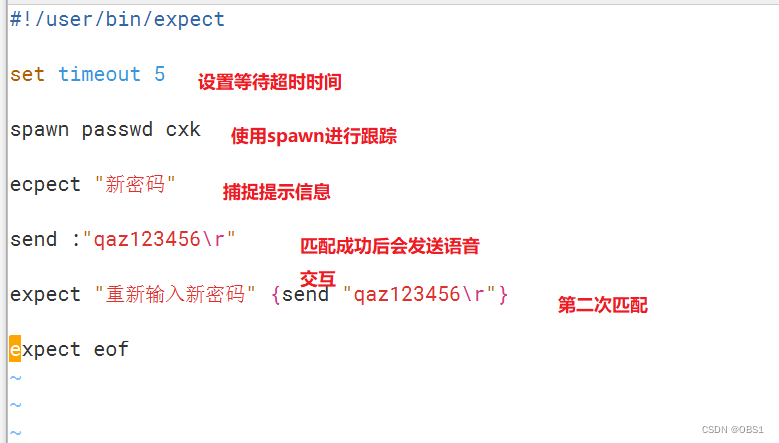
DAY 37 shell免交互
Here Document 概述 常用的交互程序:read,ftp,passwd,su,sudo cat也可配合免交互的方式重定向输出到文件 Here Document 的作用 使用I/O重定向的方式将命令列表提供给交互式程序标准输入的一种替代品 格式 命令 …...
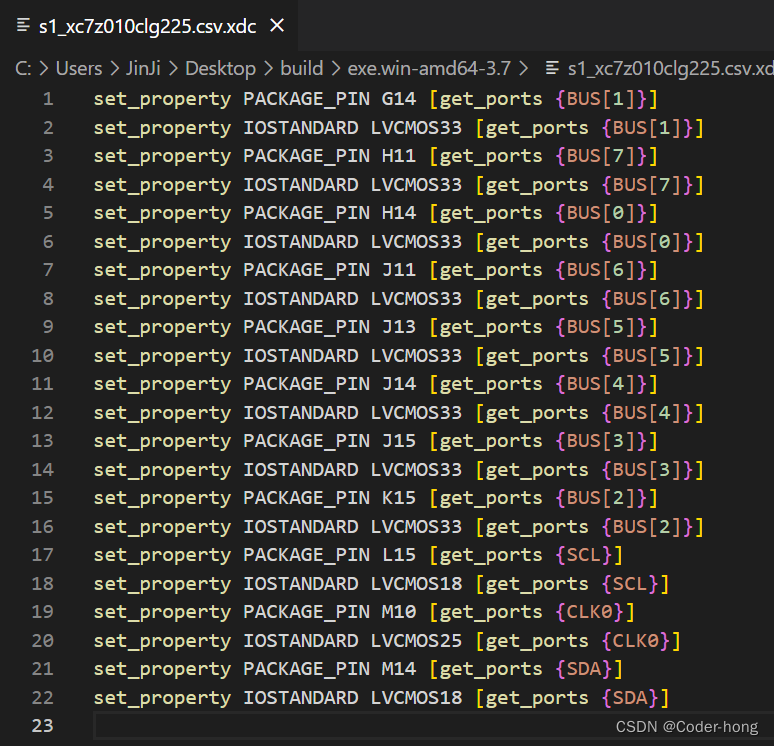
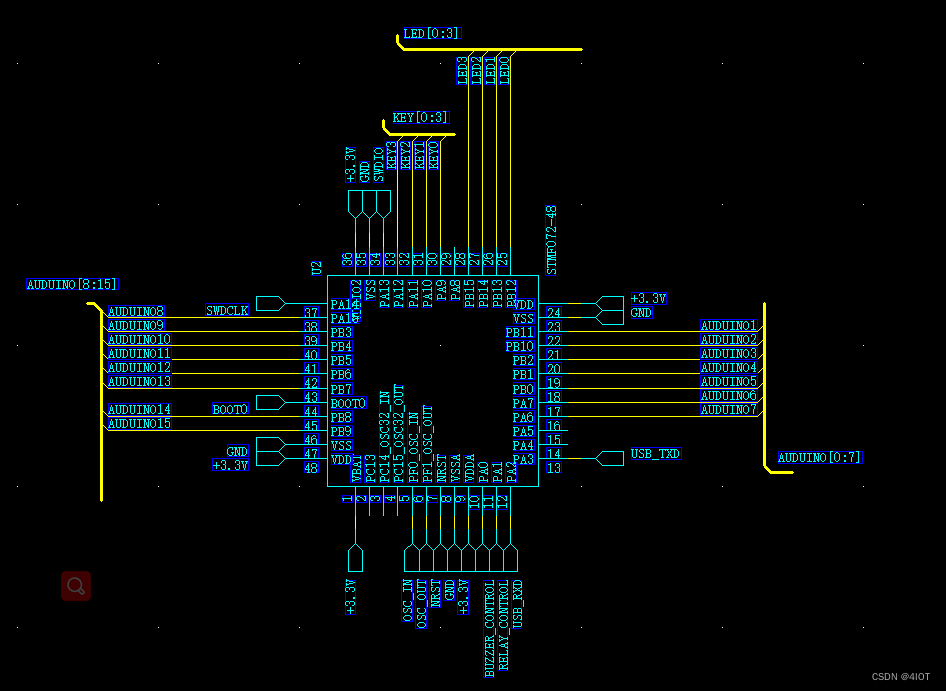
用python脚本从Cadence导出xdc约束文件
用python脚本从Cadence导出xdc约束文件 概述转换方法先导出csv文件修改CSV文件 CSV转XDC检查输出XDC文件csv2xdc源代码下载 概述 在Cadence设计完成带有FPGA芯片的原理图的时候,往往需要将FPGA管脚和网络对应关系导入vivado设计软件中,对于大规模FPGA管…...

【C++ 六】内存分区、引用
内存分区、引用 文章目录 内存分区、引用前言1 内存分区模型1.1 程序运行前1.2 程序运行后1.3 new 操作符 2 引用2.1 引用基本使用2.2 引用注意事项2.3 引用做函数参数2.4 引用做函数返回值2.5 引用本质2.6 常量引用 总结 前言 本文包含内存分区、引用基本使用、引用注意事项、…...

markdown基本语法
来自神秘人儿的投稿! markdown的使用,可以参考https://markdown.com.cn/basic-syntax/ 标题:用 # 表示 段落:enter即可,两端之间有一个空行 换行:一行的末尾加两个或者多个空格,两端之间没有…...

第十篇 Spring 集成Redis
《Spring》篇章整体栏目 ————————————————————————————— 【第一章】spring 概念与体系结构 【第二章】spring IoC 的工作原理 【第三章】spring IOC与Bean环境搭建与应用 【第四章】spring bean定义 【第五章】Spring 集合注入、作用域 【第六章】…...
PADS-LOGIC项目原理图设计
最小板原理图设计 目录 1 菜单与工具使用 2 常用设置 2.1选项卡 2.2 图纸设置 2.3 颜色设置 3 设计技巧 3.1 模块化设计思路 3.2 元件放置 3.3 走线及连接符 4 原理图绘制 4.1 POWER原理图设计 4.2 MCU原理图设计 4.2.1晶振电路 4.2.2复位电路 4.2.3 BOOT电路 …...
36岁大龄程序员被裁,找了2个月工作,年包从100万降到50万,要不要接?
为了找到工作,你愿意接受降薪多少? 一位36岁的杭州程序员问: 36岁被裁,找了2个月工作,年包从100万降到50万,真心纠结,要不要接? 网友们分成了旗帜鲜明的两派,一派人认为不…...

Android Retrofit 源码分析
1、简介 Retrofit 是一种基于 Java 的 RESTful Web Service 客户端库,它可以将网络请求抽象出来并支持多种转换器,可以将 JSON、XML 和其他格式的响应数据自动转换为 Java 对象。Retrofit 通过注解的方式来描述 REST API 调用,使开发人员能够…...

CDN如何阻止网络攻击
随着网络技术的发展,网络攻击事件也越来越多,对企业和个人的安全和稳定造成严重威胁。为此,高防CDN应运而生,成为广大用户保障网络安全的重要工具。什么是高防CDN?高防CDN的特点有哪些?高防CDN如何阻止网络攻击?接下来让我们一…...

Mybatis-Plus -04 条件构造器与代码生成器
Mybatis-Plus--条件构造器与代码生成器 1 条件构造器1.1 > < 1.2 in notin1.3 between...1.4 orderBy...1.5 like... 2 代码生成器2.1 引入依赖2.2 生成器代码 1 条件构造器 通过条件构造器可以更加轻松的完成条件查询与更新(底层就是动态SQL) 1.1 > < ge 小于 &l…...

MapReduce高级篇——全局计数器
MapReduce Counter 计数器 概念 在执行MapReduce程序的时候,控制台输出日志中通常下面片段,可以发现输出信息中的核心词是counter,中文叫做计数器 在执行MapReduce城西过程中,许多时候,用户希望了解程序的运行情况,H…...

基于WPF开发桌面AI助手:架构设计与实现详解
1. 项目概述:一个开源的WPF桌面AI助手 最近在GitHub上看到一个挺有意思的项目,叫“MayDay-wpf/AIBotPublic”。光看名字,可能有点摸不着头脑,但点进去研究一下,你会发现这其实是一个用WPF(Windows Present…...

VSCode光标主题定制指南:从颜色令牌到扩展开发
1. 项目概述:一个为开发者定制的光标主题集合如果你和我一样,每天有超过8小时的时间都泡在代码编辑器里,那么你一定会对编辑器里那个千篇一律的、闪烁的竖线光标感到审美疲劳。warrenwoodhouse/cursors这个项目,就是来解决这个“小…...

抖音图片怎么去水印?2026年在线去水印工具+方法盘点,总有一款适合你
开篇:为什么要去水印? 保存抖音图片时,总会遇到水印的困扰。这些水印包含抖音logo、发布者名称,有时还会有账号信息。对于自媒体创作者、内容整理者或普通用户来说,去除水印往往是必需的。本文将介绍当下最实用的抖音图…...
)
别再死记硬背公式了!用Python+NumPy手把手带你仿真RLC串联谐振(附代码)
用PythonNumPy动态仿真RLC串联谐振:告别枯燥公式,直观理解电路本质 当你第一次翻开电路分析教材,看到那些密密麻麻的公式推导和抽象的频率响应曲线时,是否感到一阵眩晕?RLC串联谐振作为电路分析的核心概念,…...

攻克R与Python的壁垒:Giotto空间转录组分析环境一站式搭建指南
1. 为什么你的Giotto安装总是失败? 每次看到空间转录组数据就手痒想用Giotto分析,结果安装环节就被劝退?这可能是大多数生物信息学新手都会遇到的尴尬。作为一个在生信领域摸爬滚打多年的"环境配置工程师",我太理解这种…...

SyntaxUI:基于原子设计与Web组件的现代UI库开发实践
1. 项目概述:一个为开发者而生的现代UI组件库 如果你是一名前端开发者,或者正在构建一个需要用户界面的应用,那么你肯定经历过这样的场景:为了一个按钮的样式、一个表格的交互,或者一个模态框的动画,反复在…...

从零构建现代化工作流引擎:架构、实战与生产级部署指南
1. 项目概述:一个为专业开发者打造的现代化工作流引擎最近在GitHub上看到一个挺有意思的项目,叫rohitg00/pro-workflow。光看名字,你可能觉得这又是一个“工作流”工具,市面上这类工具已经多如牛毛了。但当我深入去研究它的源码、…...

开源提示词管理工具:本地化部署与AI工作流效率提升实践
1. 项目概述:一个为AI工作流设计的提示词管理利器如果你和我一样,每天都在和ChatGPT、Claude、Midjourney这些AI模型打交道,那你一定有过这样的烦恼:昨天精心调试好的、能稳定输出高质量代码的提示词,今天想用的时候&a…...

动态提示词工程:让AI提示词具备上下文学习能力的实践指南
1. 项目概述:当提示词遇上上下文学习最近在折腾大语言模型应用时,我反复遇到一个痛点:精心设计的提示词(Prompt)在特定任务上效果拔群,但换个场景或数据,效果就大打折扣。每次都得重新调整、测试…...

基于NestJS与Next.js的自托管电影管理应用Story Flicks部署与实战
1. 项目概述:一个为影迷打造的私人观影档案库 如果你和我一样,是个重度电影爱好者,那么你一定经历过这样的时刻:看完一部好片子,内心澎湃,想写点什么记录一下,却发现豆瓣、IMDb的评论区要么太嘈…...