法规标准-ISO 16787标准解读
ISO 16787是做什么的?
ISO 16787全称为智能运输系统-辅助泊车系统(APS)-性能要求和测试程序,其中主要描述了对APS系统的功能要求及测试规范
APS类型
根据目标停车位类型将APS系统分为两类:
1)APS类型I:目标车位为两车之间的间隙
2)APS类型II:目标车位由标记(如:画线)定义
对于以上两种类型,平行和垂直车位都有可能
一般要求
工作期间的最大速度
建议在辅助泊车期间限制速度范围,并在驾驶员超过此限制时为安全起见中止辅助泊车模式。速度限制的建议范围为(前进:10公里/小时;倒车:7公里/小时至12公里/小时)
APS退出条件
如果下列一个或多个条件满足,APS应中止辅助泊车模式:
-驾驶员操纵方向盘以接管控制。方向盘的最小扭矩应由OEM确定。典型值可能约为5Nm
-APS检测到系统内部故障
-车辆超过辅助泊车模式的速度限制
系统应取消自动转向控制,并在检测到故障时向驾驶员提供声音和视觉信息
咨询说明
APS旨在检测合适的停车位,并在停车操纵过程中操纵车辆。建议在车辆操作员手册(车主手册)中包含一份咨询说明,明确说明如何使用系统,并说明中止条件、驾驶员责任和系统限制。
在驶入停车位时,应特别提醒驾驶员其安全责任。这包括注意APS可能检测不到的障碍物和其他可能的危险。特别是在垂直停车位的情况下,驾驶员应确保停车位的深度足够。如果系统检测到不安全状况应建议驾驶员不要开始操纵或立即接管对车辆运动的控制
APS还应帮助驾驶员在操纵进入停车位时识别障碍物。MALSO(150 17386)、ERBA(ISO 22840)国际标准或后视摄像头系统描述了此类系统的示例
APS 类型I
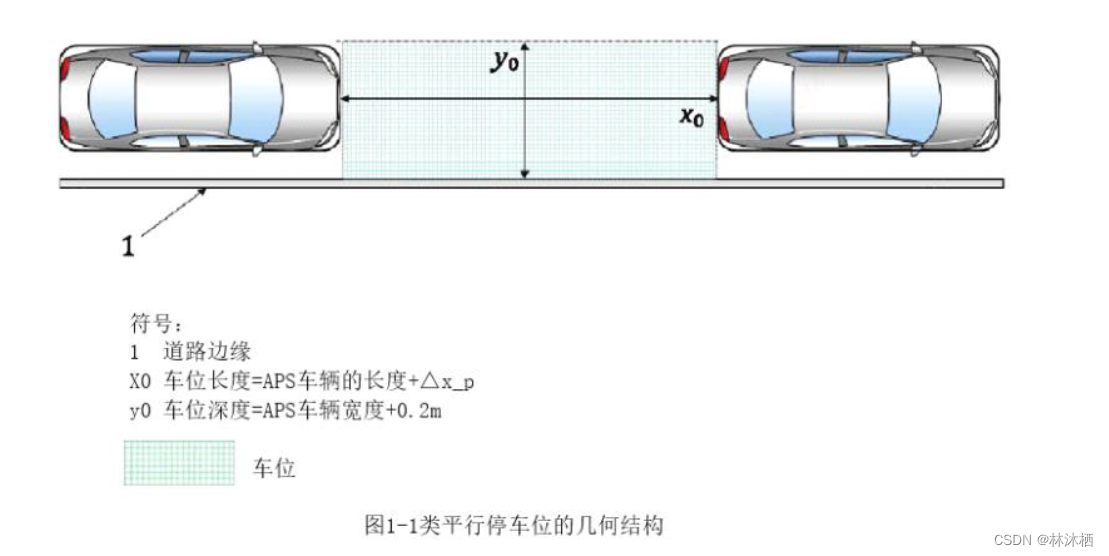
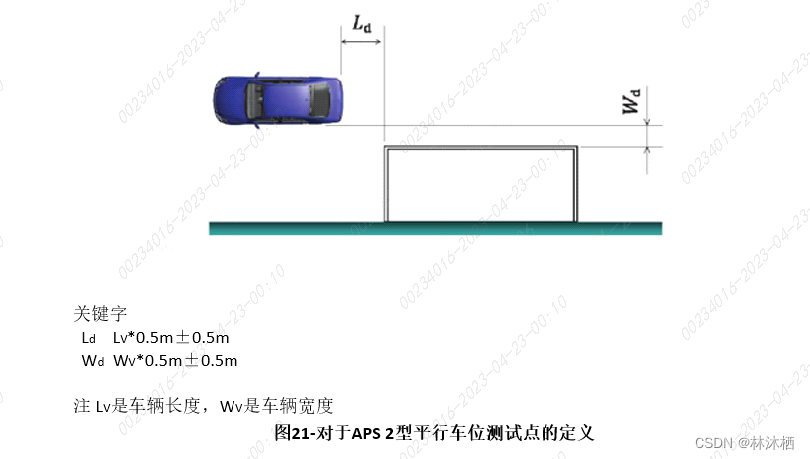
I类平行停车位
泊车操纵应使用两辆与APS车辆型号相似的车辆限定的停车位和一个可选的路缘作为横向参考。建议系统能够检测参考路缘,如图中描述的一样
建议将边界车辆沿相同方向对齐并相互平行。文件中将停车位长度x0定义为APS车辆的长度加上△x_p,车位深度yo定义为APS车辆的宽度加上0.2 m。对于测试泊车场景,考虑两种情况,有或没有基准路缘。在参考路缘的情况下,车辆以与之平行的固定距离停放。在没有路缘石的情况下,投影到地面上的停放车辆外部边界之间的虚拟连接线是横向参考线
停车位由其长度xo与其深度yo定义(如图一所示:Xo是两个参考车辆之间的距离,深度yo是参考车辆的外边界线与路缘石之间的距离)
对于长度在4m到6m之间的APS车辆,△x_p等于车辆长度乘以0.25,对于小型车辆(≤4m),△x_p=4x0.25=1m,对于大型车辆(≥6m),△x_p=6x0.25=1.5m
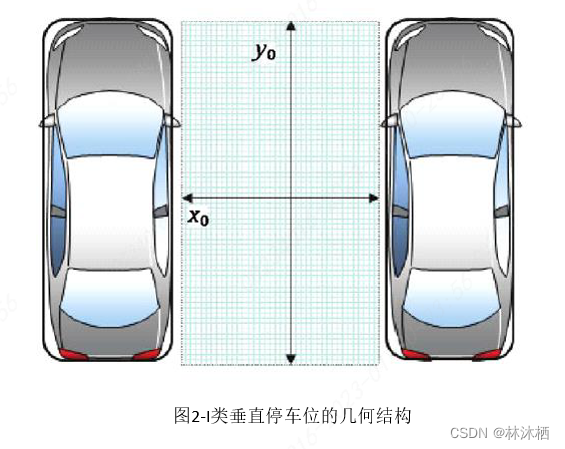
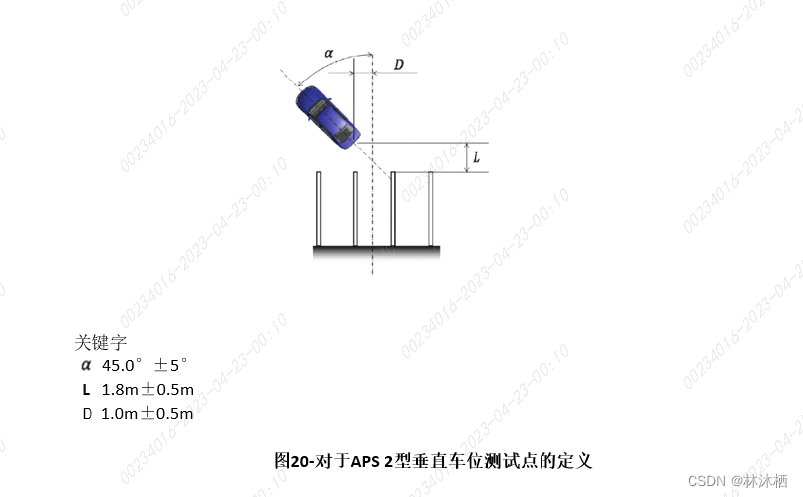
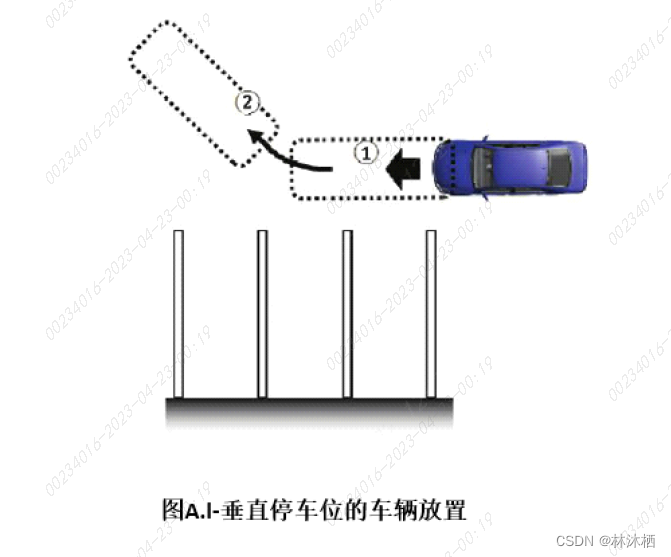
I类垂直停车位
作为最低要求,泊车操纵应在停车位受限的情况下进行,停车位受限于两辆与APS车辆模型相似的车辆。使用不同类型的车辆也可以证明符合本文件
对于本文件,建议将边界车辆与APS车辆在其目标位置的相同方向对齐,并相互平行。停车位宽度X0定义为APS车辆的宽度加上△x_l,停车位深度y0定义为APS车辆的长度。△x_l=1.2m.见图2
APS工作顺序
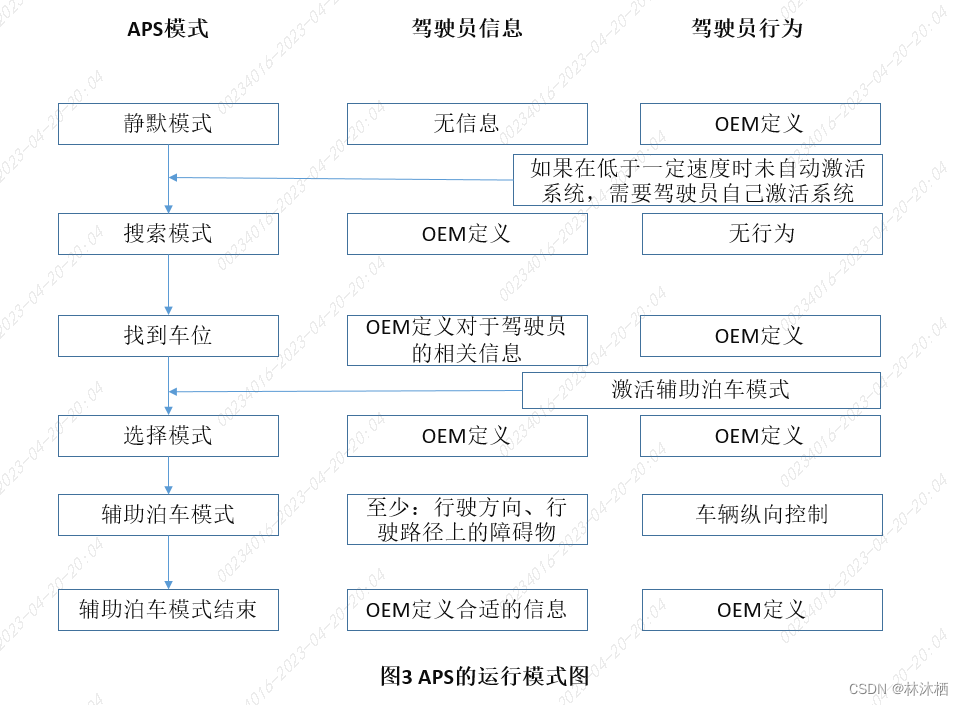
静默模式
APS类型1:如果未满足激活条件,APS不得执行任何操作
搜索模式
APS类型1:低于一定速度Vsearch_max,如果满足激活条件,APS将开始在环境中搜索合适的停车位。系统应能够在驾驶员和乘客侧的方向上搜索和停车。根据系统设计,驾驶员可以在停车位搜索期间选择支持的停车位类型(例如,仅垂直平行或垂直、仅驾驶员侧、驾驶员和乘客一侧等)。由于传感系统的物理限制,停车位内可能存在APS未检测到的障碍物,但可能会干扰检测到的停车位。此外,在垂直停车位的情况下,障碍物检测系统可能无法覆盖整个停车位深度。
找到车位
APS类型1:系统应通知驾驶员发现的潜在合适停车位。在继续下一步之前,驾驶员需要检查停车位是否有障碍物
选择模式
APS类型1:当车辆到达可以泊车辅助的位置时,APS通知驾驶员
辅助泊车模式
1.当驾驶员决定将车停在合适的停车位并停止车辆时,APS应在停车操纵过程中通过操纵转向系统向驾驶员提供建议。系统支持停车操纵的能力取决于APS车辆相对于停车位的实际启动位置。允许启动位置的限制应在车辆的车主手册中说明。
2.在车辆停止前,不得启动转向装置。
3.驾驶员应能够通过在任何时候接管APS车辆的横向控制来完成停车操纵。在这种情况下,APS应立即终止转向控制
辅助泊车模式结束
泊车操纵完成或中止时,应通知驾驶员
人机交互界面
基本信息示例
1.系统可以根据当前模式给予驾驶员提示(例如:车位搜索、车位发现、辅助泊车模式、错误模式)并且应当提供指示给配置泊车操纵的驾驶员。作为最低要求,当自动转向释放或者辅助泊车操纵成功完成或者中断时,系统应当提供听觉信息给驾驶员
2.当方向盘自动转圈前,应当发出一种警示信息
搜索模式下的信息
在搜索模式下APS系统提供哪种信息,由车辆制造商负责定义
在发现车位到辅助泊车模式期间的信息
1.应将APS发现的合适车位告知驾驶员
2.车辆制造商有责任确定在进入辅助泊车模式之前找到合适的停车位时向驾驶员提供哪种信息
驾驶员请求
车辆制造商有责任确定驾驶员必须进行哪种行为以实现APS的横向控制。例如:如果不止一个可能的停车位可用,则驾驶员可能需要确认目标停车位的选择
辅助泊车期间的信息
1.当开始操纵进入停车位的所有先决条件都满足并且APS切换到辅助泊车模式时,应通知驾驶员。
2.当车辆处于辅助泊车模式时,需要向驾驶员提供以下信息或警告:
—— 释放自动转向时,系统应向驾驶员提供声音信息
——如果APS检测到故障,应通知驾驶员
——APS可在辅助泊车模式下向驾驶员提供附加信息,例如换档指令或行驶速度
辅助泊车结束的信息
当APS完成停车操纵并停止车辆横向控制时,应通知驾驶员(离开辅助泊车模式时,转向被释放)
最低性能要求
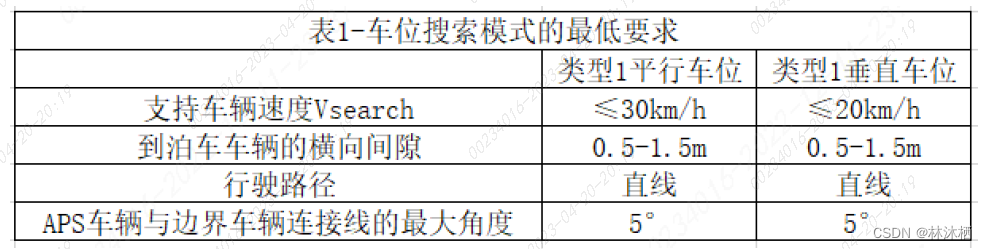
车位搜索模式下的性能要求
当系统处于车位搜索模式时,应满足表1中的最低系统要求:
辅助泊车模式下的性能要求
速度要求
1.APS类型1:在泊车操纵的某些部分,支持的最大速度应至少为5 km/h。建议在辅助泊车期间限制速度范围,并在车辆超过此限制时中止辅助泊车模式。速度限制的建议范围为。前进:10公里/小时;后退:12公里/小时。车辆应遵循避免与APS检测到的物体发生碰撞
APS类型1平行车位结束位置要求
针对以下子条例列出的2个标准场景,APS车辆在辅助泊车操纵完成时所达到的结束位置要求考虑D_f,D_r车辆的前轮和后轮到路缘的距离,以及和路边缘方向α(有路边缘的场景)或者D_f,D_r,和两泊车车辆连接线的方向α
——角度要求:
到道路边缘或车辆连接线的角度α应当在-3°到+3°之间,目标是0°
——与参考线的距离要求:
与道路边缘的距离D_r,D_f应当在0.05m到0.3m之间或与车辆连接线的距离D_r,D_f应当由车辆制造商定义并且依赖APS车辆实际的宽度
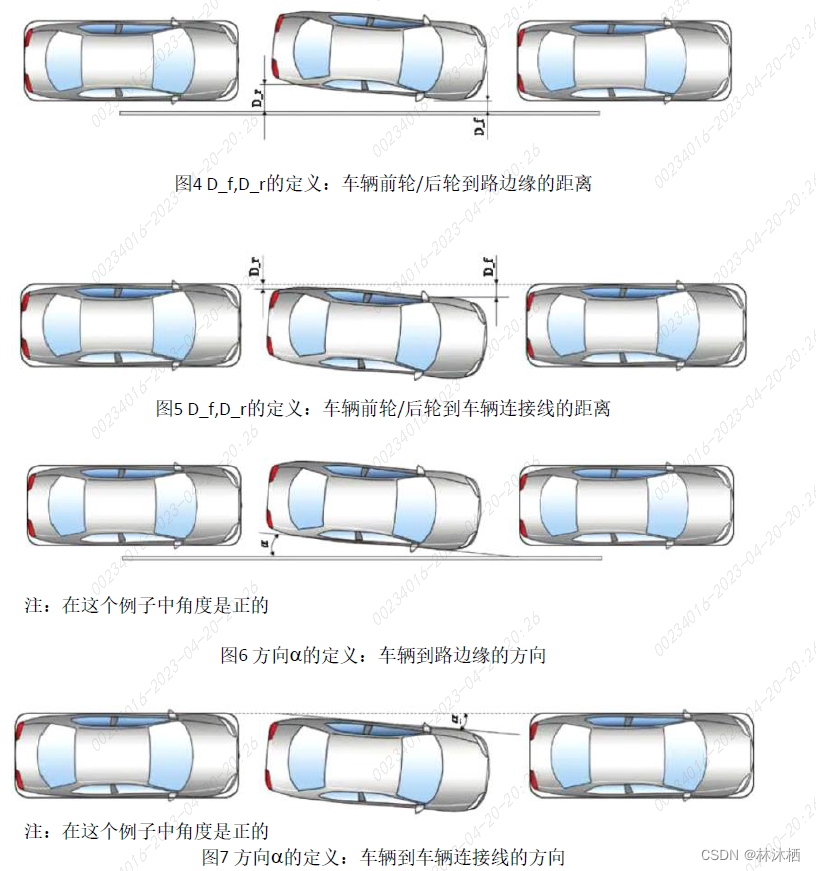
注:到路边缘或者连接线的目标距离D_f,D_r可能是APS内置参数依赖车辆制造商和当前场景。一个准确的值不会在本文挡中定义,但是一个可用的范围可以给出
APS类型1垂直车位结束位置要求
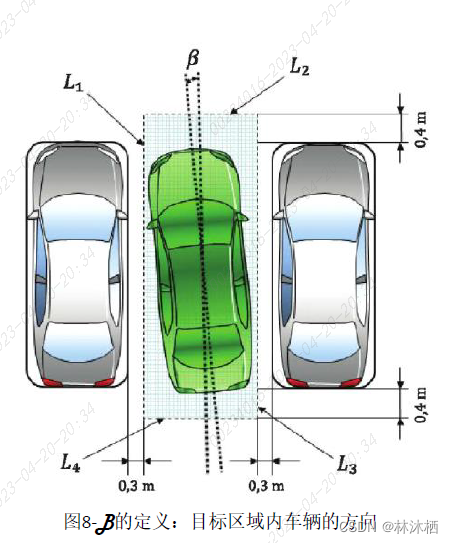
对于本子条款中描述的标准泊车场景,辅助泊车操纵结束时,APS车辆达到的终点位置要求由目标区域描述,目标区域由4条线限制。L1与左侧边界车辆的右侧侧面平行,距离为0.3 m,L3与右侧边界车辆的左侧侧面平行,间距为0.3 m。L2和L4平行于边缘车辆的前/后边缘,距离为0.4 m。由于系统不控制APS车辆的纵向移动,当系统指示辅助泊车模式已完成且达到目标区域时,驾驶员应停止车辆。在终点位置,无论侧视镜如何,投影在地面上的APS车辆轮廓应完全在目标区域内
——角度要求:
所有场景要求:角度B应当在-3°到+3°之间,目标是0°
性能要求测试
车位搜索测试
需要以一个规定的车速、一个与停放车辆的横向距离和的角度进行试验。应进行十次试验。必须至少检测九次停车位
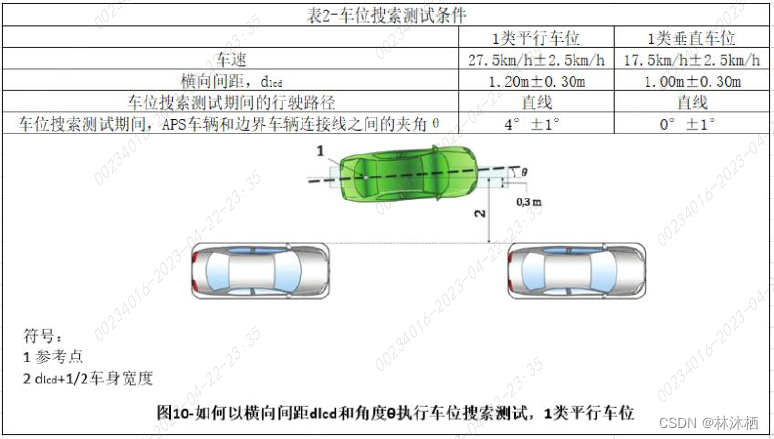
注:参考点为后轴的中间
辅助泊车期间的支持速度测试
在操纵开始到驶入停车位期间,最小速度峰值5.0km/h应当被应用
结束位置测试
为了测量APS车辆的结束位置,应当对同一停车位进行10次测试。在10次测试中,9次必须成功。成功的试验包括APS模式的完整序列(从车位搜索模式开始)
每次测试到达结束位置后,都需要测量距离D_f,D_r,和角度α。在有路边缘的场景下,前轮到道路边缘的距离D_f和后轮到道路边缘的距离D_r应当被测量
APS类型1平行车位
1.角度要求:
——APS车辆到道路边缘或车辆连接线的角度α应当在-3°到+3°之间
——α的标准偏差不得超过1.5
2.到参考线的距离要求
——到道路边缘的距离D_f,D_r应当在0.05到0.3m范围内或者到车辆连接线的距离D_f,D_r由制造商决定,车辆制造商可在此范围内选择目标距离
——D_f,D_r的标准偏差不得超过0.1m
APS类型1垂直车位
1.角度要求:
——角度B应当在-3°到+3°之间
——B的标准偏差不得超过1.5°
2. 到参考线的距离要求
——APS车辆应完全位于目标区域内
APS 类型II
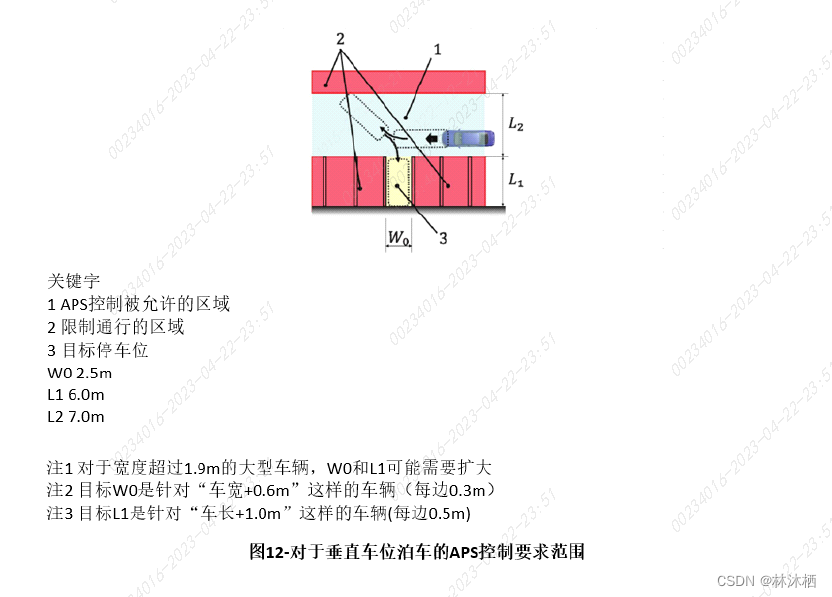
APS通过识别标记(如地面上的画线)来定位车辆可以停放的停车位,以确定目标停车位并计算引导路线,如图11所示:
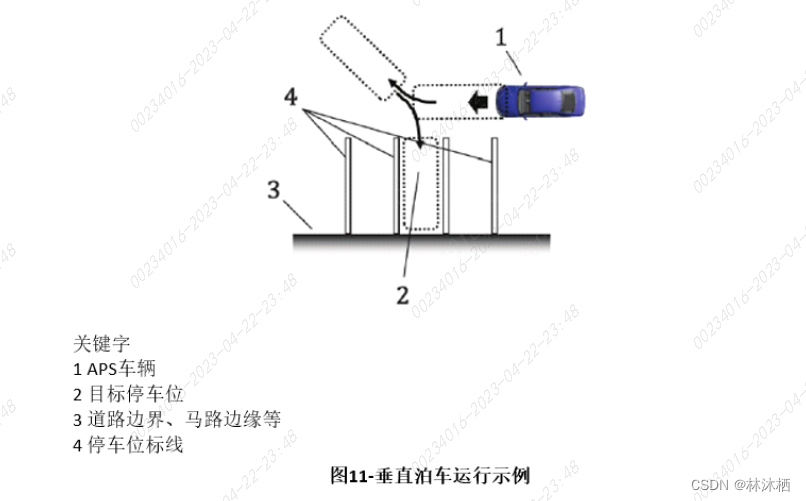
APS通过在泊车操纵过程中自动控制转向,将车辆引导至目标停车位。控制完成后,车辆在目标停车位的位置应达到一定的精度。本文件仅定义允许APS控制的区域,目标停车位以及限制通行的区域,没有通过感知或路线指引的寻址方法,并且限制泊车期间转弯时使用的来回次数(如三点转弯)
几何要求
1.在车辆控制期间,车辆不得进入限制通行区域
2.图12和13展示的环境条件的引导线,需要在系统设计时考虑进去。APS控制车辆被要求保持在图中APS控制允许的区域内。同时让用户知道系统如何辅助泊车操纵以及性能限制也是很重要的。系统如何工作的描述和周边目标物可能存在的干扰应该至少在用户手册中说明

APS工作顺序
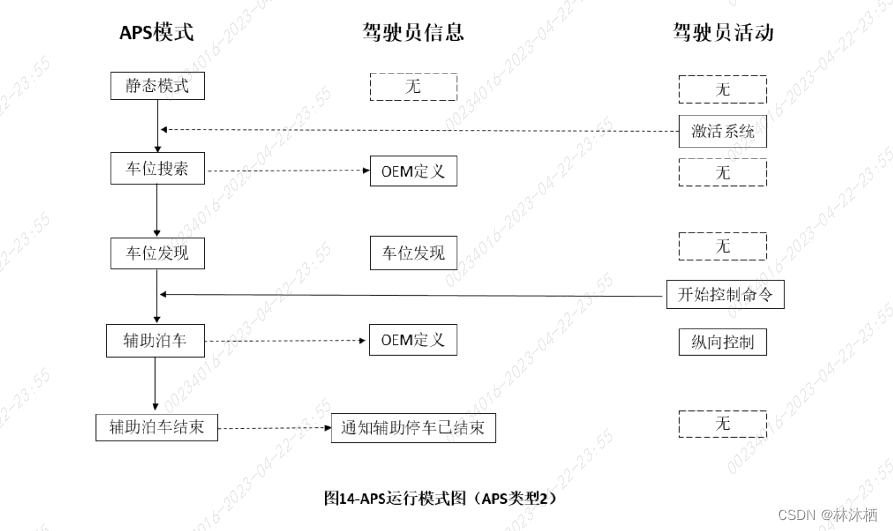
人机交互界面
1.在驾驶员把车辆开到APS控制可以启动的区域之后,驾驶员可以按照用户手册或者类似的进行系统启动
2.APS通过显示器等用户界面通知驾驶员目标停车位置
3.APS通过驾驶员的输入(如更改档位或按下命令开关)开始将车辆操纵至目标停车位
4.APS应在适当的时间向驾驶员提供必要的说明和警告
5.APS应通知驾驶员APS操作结束
最低性能要求
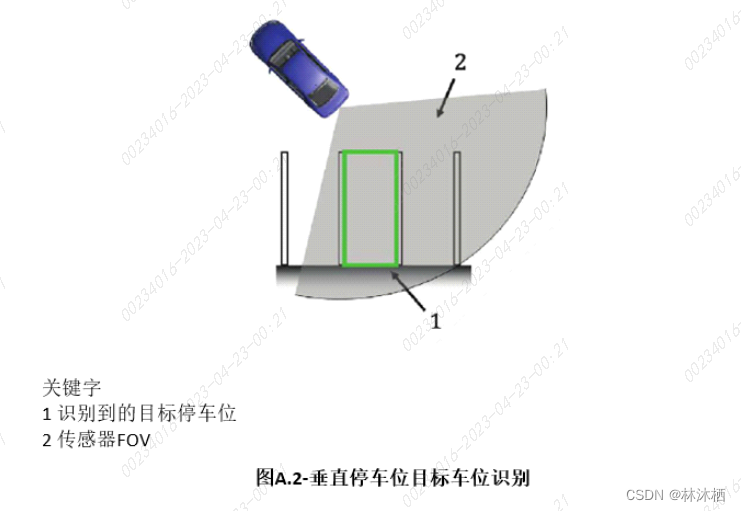
目标车位识别
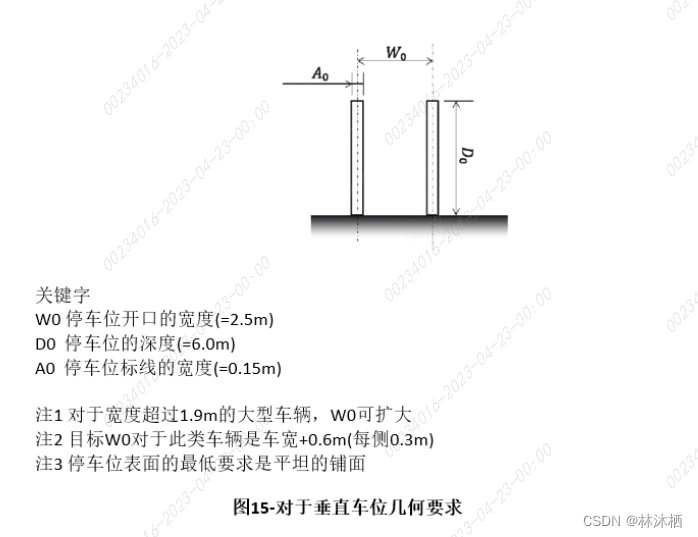
1.垂直车位:
2.平行车位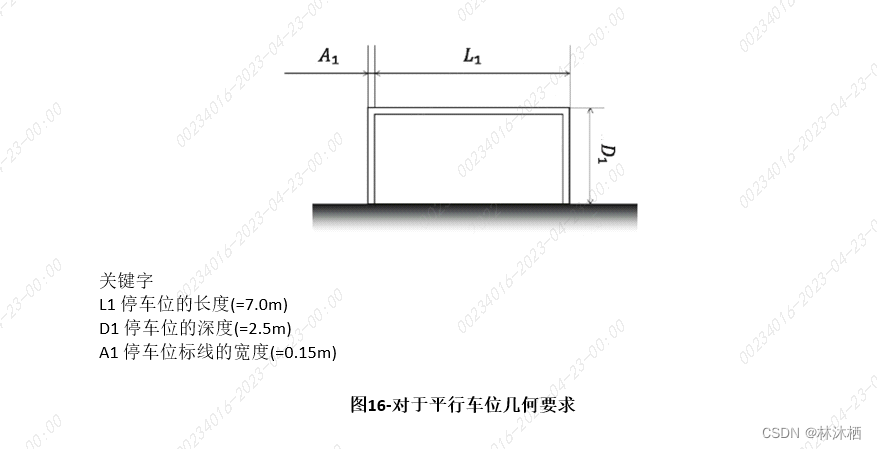
3.到达泊车辅助启动位置后,系统应识别目标停车位并将结果通知驾驶员
4.识别停车位的最低照明要求应为100 lux或更低(假设使用室内停车场)
5.识别所需的停车位线和路面之间的最小亮度对比度最好为5:1或更大;显示亮度对比度的定义见公式1:
速度要求
建议在辅助泊车期间限制速度范围,并在驾驶员超过此限制时为安全起见中止辅助泊车模式。速度限制的建议范围为(前进:10公里/小时;倒车:7公里/小时至12公里/小时)
结束位置要求
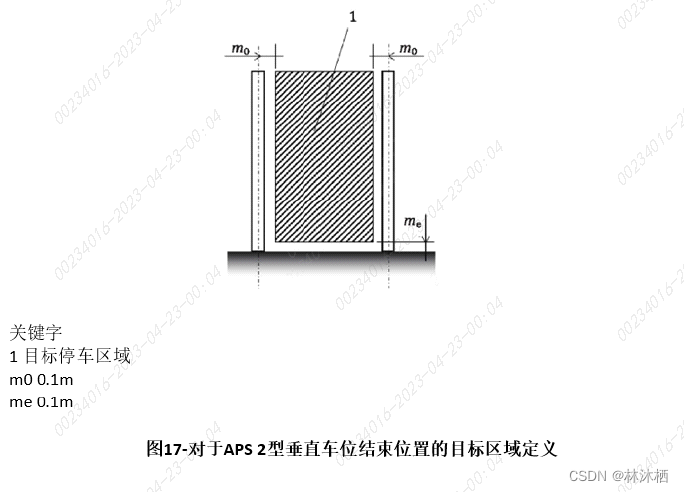
APS类型II垂直车位结束位置要求
1.位置要求:APS引导车辆到达目标停车位。当车辆完成泊车辅助时,车辆应停留在喷漆线定义的停车位内。
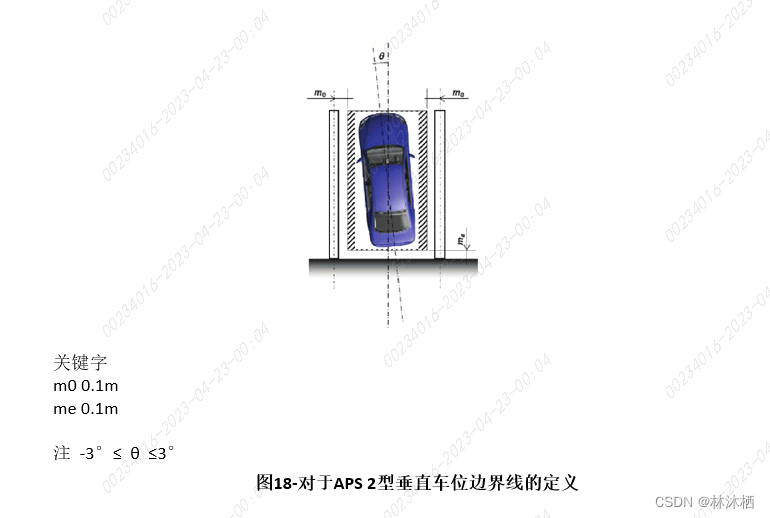
2.角度要求:系统性能定义为相对于停车位线的指示角θ和停车辅助停车完成时的“偏差”
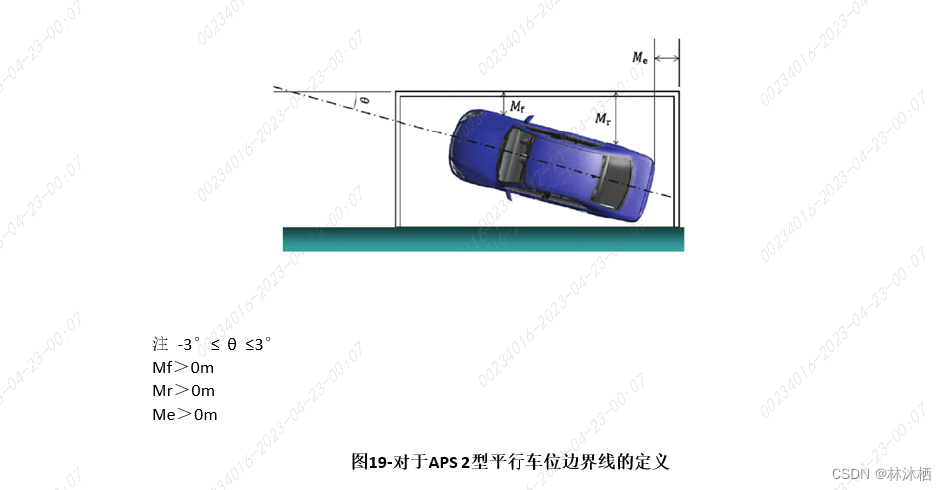
APS类型II平行车位结束位置要求
1.角度及位置要求:
性能要求测试
车位搜索测试
1.停车位应位于平坦的统一路面(沥青或混凝土)上
2.目标停车位的照度应为100 lx或更高
3.绘制的线条与表面之间的亮度对比度应为5:1或更大
4.垂直车位:
5.平行车位:
终点位置测试
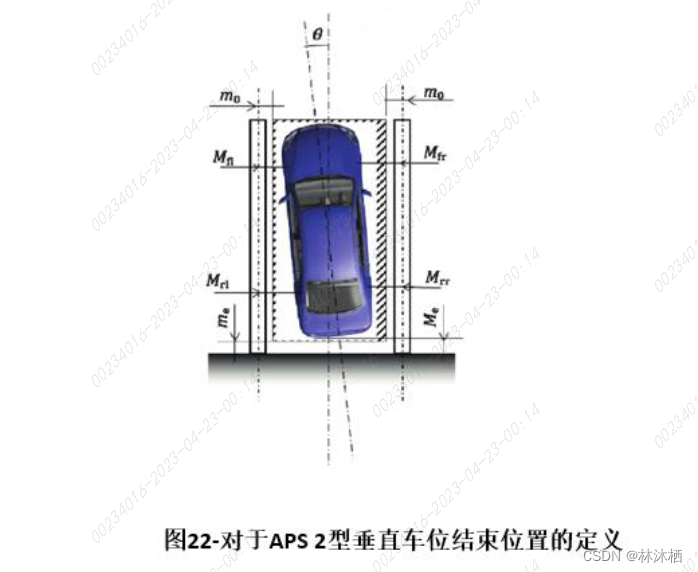
APS类型II垂直车位
1.测量相对于停车标线中心线的角度θ,相对于停车位标线中心的横向边距Mfl,Mfr,Mrl,Mrr,相对于停车位最后方的纵向边距Me;
2.横向边缘的车辆参考点是最外侧轮胎与地面的接触点,而车身的最后部分是纵向边缘
3.标准:-3.0°≤θ≤3.0°,Mfl> mo, Mfr > mo, Mrl > mo, Mrr > mo (mo = 0.1 m), Me > me (me = 0.1 m)
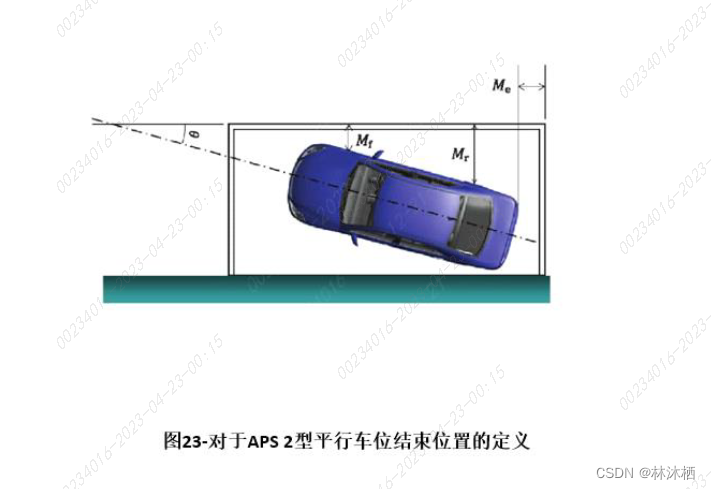
APS类型II平行车位
1.车辆应在停车位线内,不得停留在停车位线上。测量相对于停车位边线的角度θ,并测量与停车位边线相应直线的偏差Mf、Mr和Me
2.标准:-3.0°≤θ≤3.0°,Mf>0m,Mr>0m,Me>0m
APS工作顺序示例
车辆放置
驾驶员应手动将车辆移动到传感器可以捕捉到标记(如油漆线)定义的停车位的位置
打开主开关
1.主开关:系统应有一个主开关供驾驶员操作。驾驶员打开主开关后,应遵循选择泊车辅助模式后的顺序
2.当主开关关闭时,应取消所有控制
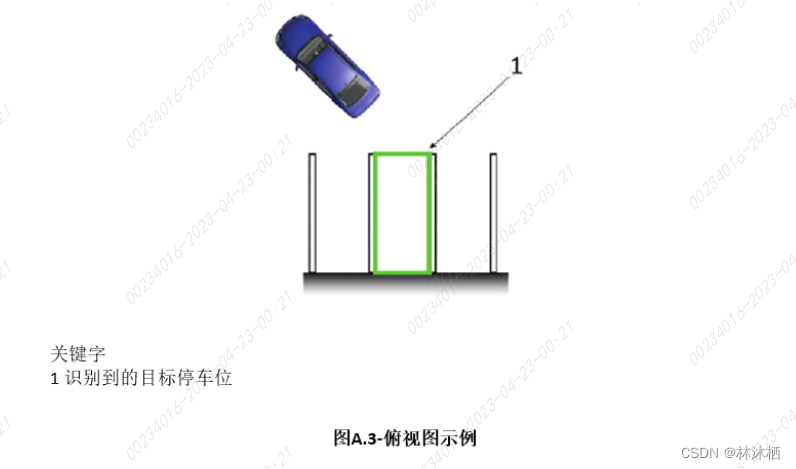
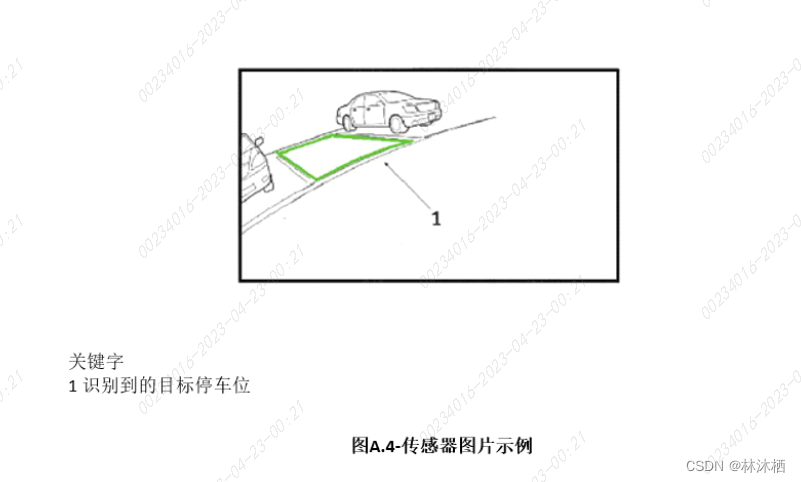
识别停车位
例如,APS从传感器图像中的槽线识别车辆可以停放的位置,并在同一传感器图像上覆盖网格(框)
重叠显示的方法,例如从车辆上方的俯视图或传感器图像的直接描绘,取决于制造商的设计,没有此类限制
驾驶员确认目标停车位
1.系统应能够通知驾驶员找到了合适的停车位
2.在车辆向系统检测到或驾驶员选择的目标停车位移动之前,驾驶员应能够确认控制开始
辅助泊车
1.当驾驶员决定将车停在找到的合适停车位并停车时。APS应在停车操纵过程中通过操纵转向来帮助驾驶员提供建议。
2.可以提前发出警告,以提醒驾驶员在方向盘通过自动控制开始转动之前要小心
3.系统支持泊车操纵的能力将取决于APS车辆相对于停车位的实际启动位置。允许启动位置的限制应在车辆的用户手册中描述
4.在车辆静止之前,不得启动转向
5.驾驶员应能够随时接管APS车辆的横向控制。在这种情况下。APS应立即终止转向的自动执行
辅助泊车结束
1.泊车操纵完成或中止时,应通知驾驶员
相关文章:
法规标准-ISO 16787标准解读
ISO 16787是做什么的? ISO 16787全称为智能运输系统-辅助泊车系统(APS)-性能要求和测试程序,其中主要描述了对APS系统的功能要求及测试规范 APS类型 根据目标停车位类型将APS系统分为两类: 1)APS类型I&a…...

脑力劳动-英文单词
标题 前言必学场景词汇及用法会议简报电话出差市场调研广告与媒介电脑情境常用单词会议简报电话市场调研广告与媒介电脑前言 加油 必学场景词汇及用法 会议 1meeting [ˈmitɪŋ] n.会议hold / have / call off a meeting举办/取消会议be in a meeting在开会The meeting w…...
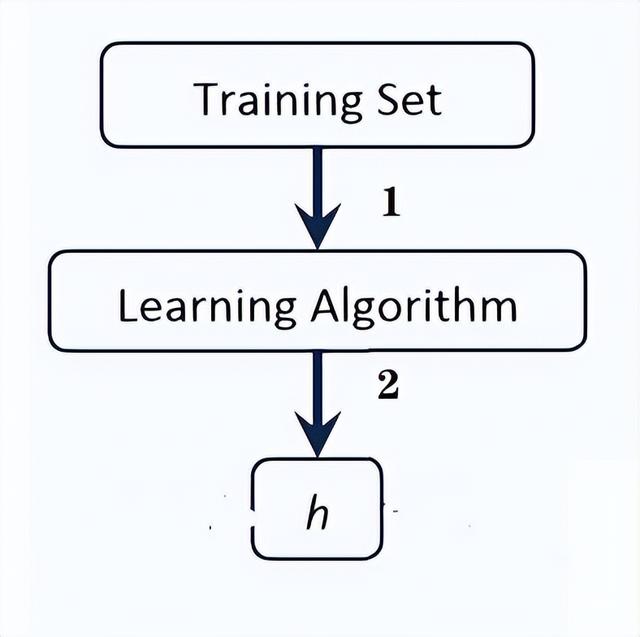
机器学习中的三个重要环节:训练、验证、测试
本文重点 模型训练、验证和测试是机器学习中的三个重要环节。这三个环节之间存在着紧密的关系,它们相互作用,共同构建出一个完整的机器学习模型。在本文中,我们将详细介绍模型训练、验证和测试之间的关系。 模型训练、验证和测试之间的关系 模型训练是机器学习中最基本的…...
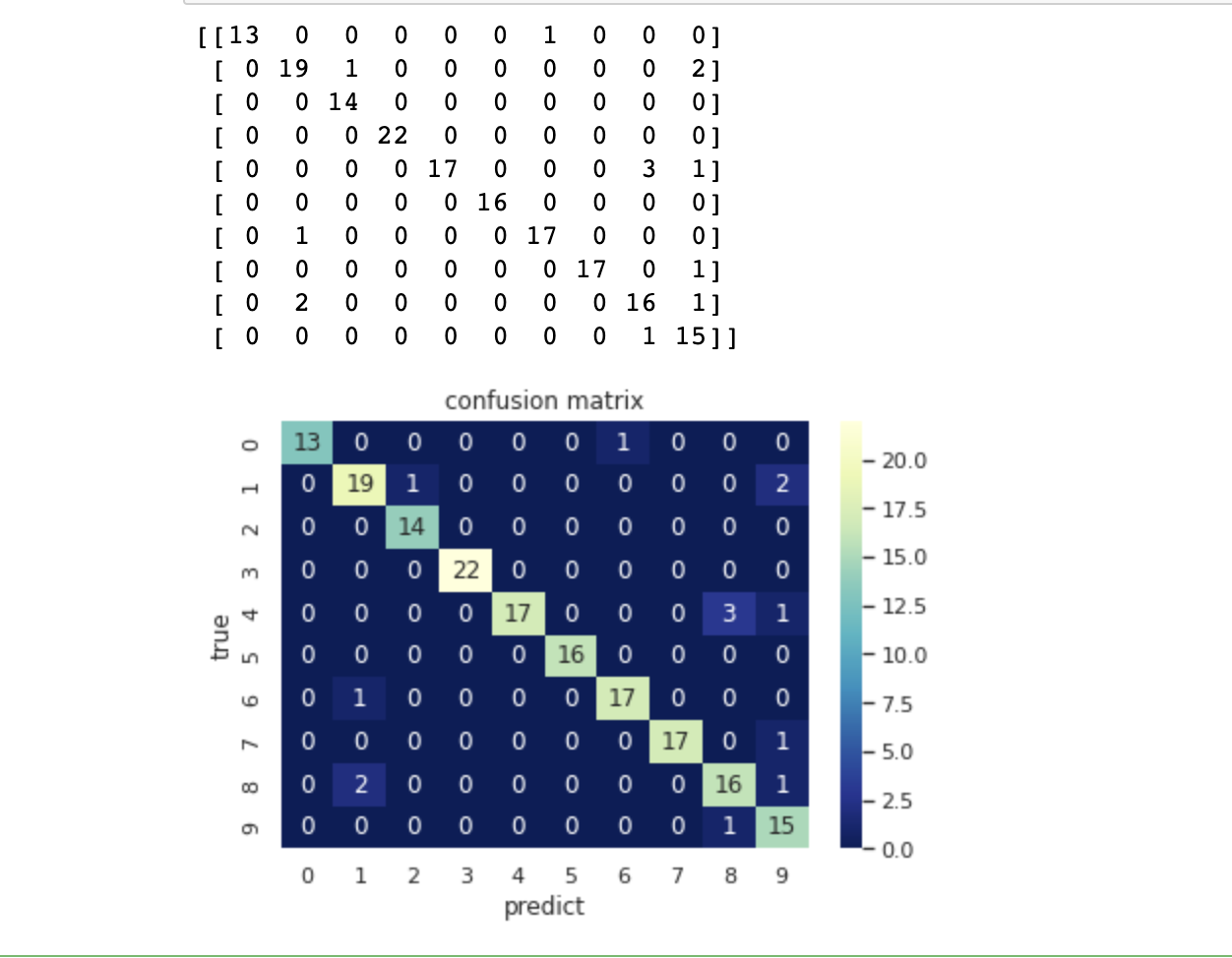
机器学习实战:Python基于LDA线性判别模型进行分类预测(五)
文章目录 1 前言1.1 线性判别模型的介绍1.2 线性判别模型的应用 2 demo数据演示2.1 导入函数2.2 训练模型2.3 预测模型 3 LDA手写数字数据演示3.1 导入函数3.2 导入数据3.3 输出图像3.4 建立模型3.5 预测模型 4 讨论 1 前言 1.1 线性判别模型的介绍 线性判别模型(…...
)
Java枚举(Enum)
枚举(enum) enum全称enumeration,JDK 1.5中引入的新特性。在Java中,被enum关键字修饰的类型就是枚举类型 可以将枚举看成一个类,它继承于java.lang.enum类,当定义一个枚举类型时,每一个枚举类型…...

【Python】【进阶篇】二十一、Python爬虫的多线程爬虫
目录 二十一、Python爬虫的多线程爬虫21.1 多线程使用流程21.2 Queue队列模型21.3 多线程爬虫案例1) 案例分析2) 完整程序 二十一、Python爬虫的多线程爬虫 网络爬虫程序是一种 IO 密集型程序,程序中涉及了很多网络 和 本地磁盘的 IO 操作,这会消耗大…...
)
Python从入门到精通14天(eval、literal_eval、exec函数的使用)
eval、literal_eval、exec函数的使用 eval函数literal_eval函数exec函数三者的区别 eval函数 eval()是Python中的内置函数,它可以将一个字符串作为参数,并将该字符串作为Python代码执行。它的语法格式为:eval(expression,globalsNone,locals…...
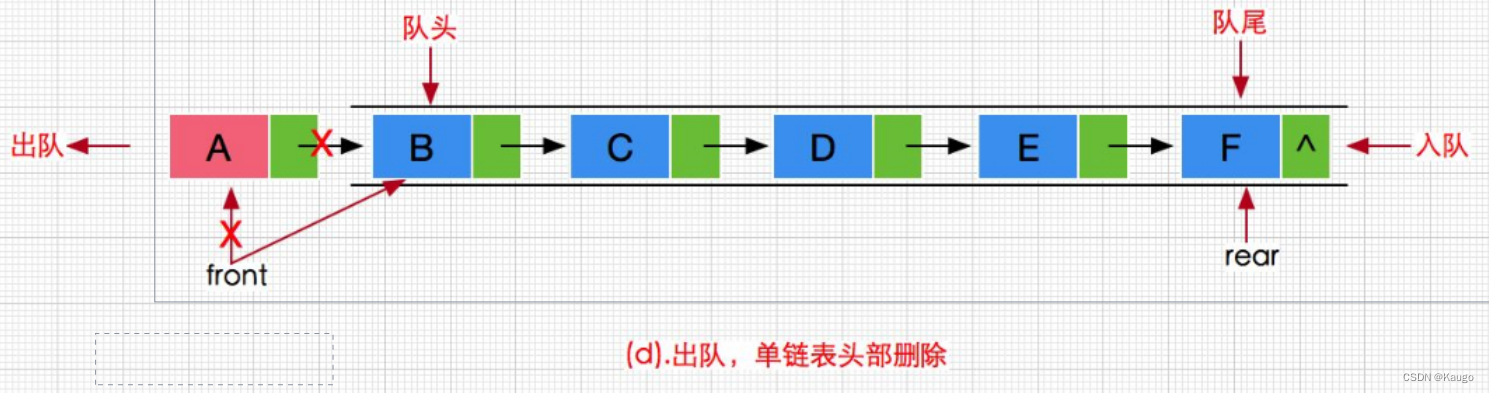
队列的基本操作(C语言链表实现)初始化,入队,出队,销毁,读取数据
文章目录 前言一、队列基本变量的了解二、队列的基本操作2.1队列的初始化(QueueInit)2.2入队(QueuePush)2.3判断是否为空队(QueueEmpty)2.4出队(QueuePop)2.5队列的队头数据…...

项目支付接入支付宝【沙箱环境】
前言 订单支付接入支付宝,使用支付宝提供的沙箱机制模拟为订单付款。我这里主要记录一下沙箱环境如何接入到系统中,具体细节的实现。按照官方文档来就可以了。 1、使用步骤 这里有几个重要数据要拿到,一个是支付宝的公钥和私钥,…...

程序员应该如何提升自己
作为一名程序员,以下是您可以考虑的一些方法来提高自己的技能和知识: 深入学习编程语言和相关工具:了解您使用的编程语言和相关工具的基本原理和高级特性,以便更好地理解其工作方式并更有效地使用它们。 刻意练习:刻意…...

全球上线!ABB中国涡轮增压器分拆 – 数据清理阶段完成
ABB是数字行业的技术前沿者,拥有四项主营业务:电气化,工业自动化,运动控制以及机器人和离散自动化。ABB总部位于瑞士苏黎世,业务遍及100多个国家,拥有约105,000名员工。2021年,该公司…...
)
手写简易 Spring(三)
文章目录 三. 手写简易 Spring(三)1. Bean 对象初始化和销毁方法1. XML 添加 init-method 与实现 InitializingBean 接口注册初始化2. XML 添加 destroy-method 与实现 DisposableBean 接口注册销毁3. DefaultSingletonBeanRegistry 优秀的解耦方法 2. 定…...

设计模式-看懂UML类图和时序图
这里不会将UML的各种元素都提到,只讲类图中各个类之间的关系; 能看懂类图中各个类之间的线条、箭头代表什么意思后,也就足够应对 日常的工作和交流; 同时,应该能将类图所表达的含义和最终的代码对应起来; 1…...

2023年全国最新安全员精选真题及答案57
百分百题库提供安全员考试试题、建筑安全员考试预测题、建筑安全员ABC考试真题、安全员证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 101.(单选题)遇有()及以上强风、浓雾等…...

数字图像处理基础
图像增强:不论方法,只要能够得到较好的图像即可 图像复原:找到图像退化的原因,把噪声过滤得到较好的图像 RGB——HSI(色调 饱和度 亮度)彩色图像处理需要用到灰度图像处理 直方图均衡,灰度概率密度函数接近均匀分布&a…...
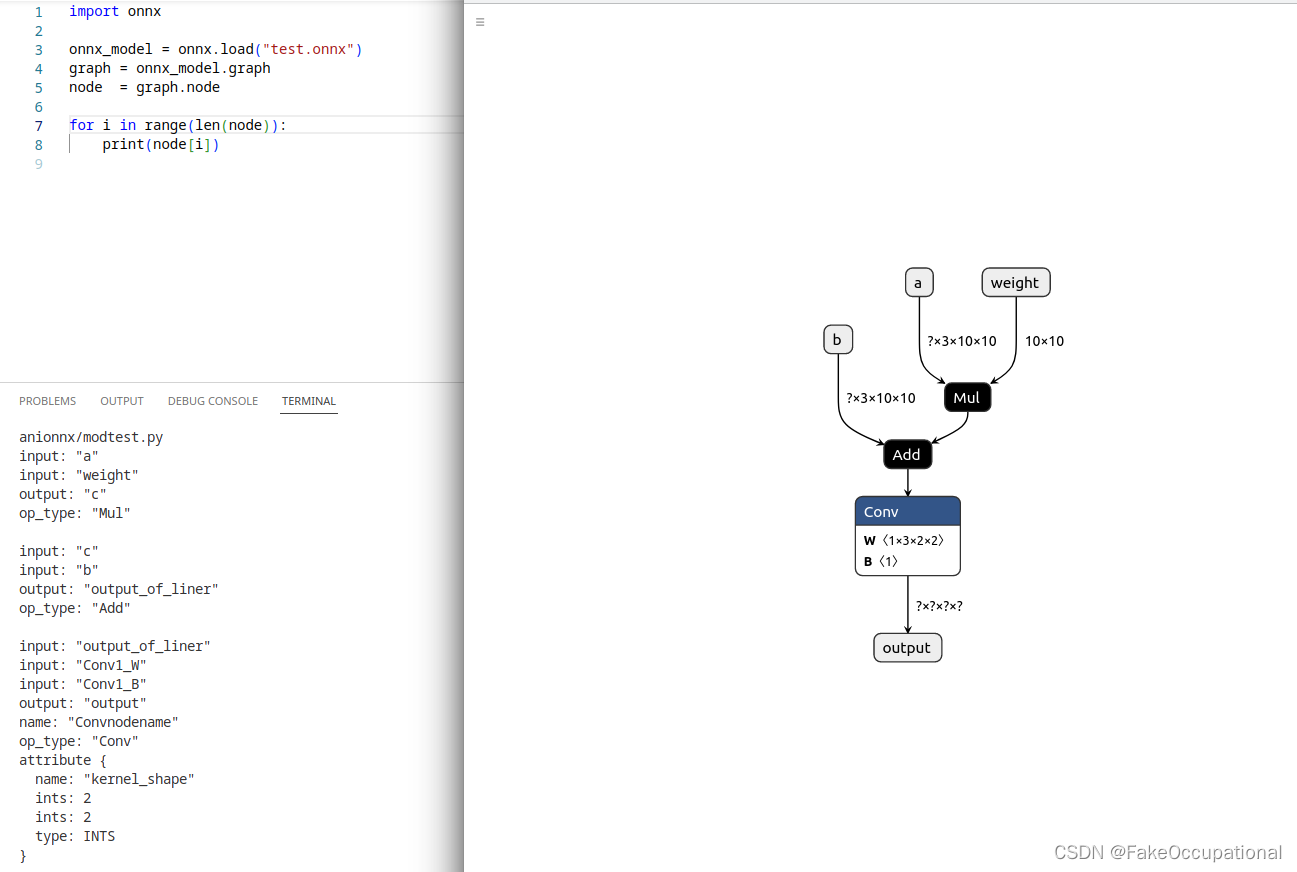
onnx手动操作
使用onnx.helper可以进行onnx的制造组装操作: 对象描述ValueInfoProto 对象张量名、张量的基本数据类型、张量形状算子节点信息 NodeProto算子名称(可选)、算子类型、输入和输出列表(列表元素为数值元素)GraphProto对象用张量节点和算子节点组成的计算图对象ModelP…...
虚拟机安装Centos7,ping不通百度
虚拟机安装Centos7,ping不通百度 一、虚拟机网络配置 网络适配器选择桥接模式,不勾选复制物理网络连接状态。 同时虚拟机使用默认配置都是桥接。 二、配置静态IP 1、首先,查看宿主机的IP和网关 2、配置静态ip的文件地址及修改命令如下&…...

leetCode算法第一天
今天开始刷算法题,提升自己的算法思维和代码能力,加油! 文章目录 无重复字符的最长子串最长回文子串N形变换字符串转换整数 无重复字符的最长子串 leetCode链接 https://leetcode.cn/problems/longest-substring-without-repeating-characte…...

怎么将太大的word文档压缩变小,3个高效方法
怎么将太大的word文档压缩变小?word文档是我们在办公中使用较多的文件格式之一,相信小伙伴们会遇到这样的问题,编辑完成word文档之后发现,编辑完的文档体积太大了,无论是发送给客户还是上传到邮箱中都不方便࿰…...

mvc+动态代理
不使用MVC的时候系统存在的缺陷 一个Servlet都负责了那些工作? 负责了接收数据负责了核心的业务处理负责了数据表中的CRUD负责了页面的数据展示… 分析银行转账项目存在那些问题? 代码的复用性太差。(代码的重用性太差) 因为没…...

从零构建天气预报Web应用:Vue.js与Node.js全栈实战指南
1. 项目概述:一个开源的天气预报应用 最近在GitHub上看到一个挺有意思的项目,叫 fsboy/weather-forecast 。光看名字就知道,这是一个天气预报应用。但如果你以为它只是个简单的天气查询工具,那就太小看它了。这个项目吸引我的地…...

基于视觉语言模型的智能体框架:让AI看懂界面并自动操作
1. 项目概述:当AI学会“看”与“想”最近在探索AI与视觉结合的领域时,我深度体验了landing-ai团队开源的vision-agent项目。这不仅仅是一个工具库,它更像是一个为大型语言模型(LLM)装上了“眼睛”和“手”的智能体框架…...

ARM Cortex-A5 SCU架构与多核缓存一致性解析
1. ARM Cortex-A5 SCU架构解析SCU(Snoop Control Unit)是Cortex-A5多核处理器中的关键组件,主要负责维护多核间的缓存一致性。当某个CPU核心修改了共享内存区域的数据时,SCU会自动通知其他核心的缓存进行更新或失效操作。这种机制…...

基于CircuitPython与MagTag的电子墨水屏俳句显示器项目实践
1. 项目概述与核心价值如果你对嵌入式开发感兴趣,但又觉得传统的C/C开发环境配置繁琐、学习曲线陡峭,那么CircuitPython绝对是一个值得尝试的入口。它本质上是一个运行在微控制器上的Python 3解释器,由Adafruit主导开发,目标就是让…...

雷达目标检测与成像算法实时实现【附代码】
✨ 长期致力于阵列雷达、多输入多输出、现场可编程门阵列、目标检测定位、高分辨成像研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)相控阵和差波束目…...
)
用STM32F103C8T6和HC-05蓝牙模块,从零DIY一辆蓝牙遥控小车(附完整代码与MIT App Inventor教程)
从零打造STM32蓝牙遥控小车:硬件配置到APP开发全指南 项目背景与核心价值 对于嵌入式开发初学者来说,理论知识和实际项目之间往往存在一道难以跨越的鸿沟。而一个完整的硬件项目实践,恰恰是填补这一空白的最佳方式。基于STM32F103C8T6和HC-05…...

别再只会用LM358了!手把手教你用电压跟随器搞定嵌入式硬件中的阻抗匹配难题
嵌入式硬件实战:用电压跟随器破解阻抗匹配困局 在调试一款基于STM32的土壤湿度检测仪时,我发现传感器输出的微弱信号经过3米长的导线传输后,ADC采集到的数值总是比实际值低15%左右。更换更高精度的ADC芯片也无济于事,直到在信号源…...

Claude API密钥自动化同步工具:架构设计与实战部署指南
1. 项目概述与核心价值最近在折腾一个挺有意思的自动化项目,起因是我发现团队里不同成员在使用Claude API时,经常遇到一个挺烦人的问题:每个人手里的API密钥状态不一致。有的同事的密钥突然失效了,有的配额用完了自己还不知道&…...
:原型探索——从一段单函数代码开始)
从零构建嵌入式菜单库(一):原型探索——从一段单函数代码开始
从零构建嵌入式菜单库(一):原型探索——从一段单函数代码开始 系列定位:这是一套编写教程——我们将一起从零构建一个基于 U8g2 的嵌入式菜单库,分析每一步的设计决策、收益与代价。 最终产物:u8g2_menu&am…...

Raspberry Pi Imager终极指南:快速上手树莓派系统安装
Raspberry Pi Imager终极指南:快速上手树莓派系统安装 【免费下载链接】rpi-imager The home of Raspberry Pi Imager, a user-friendly tool for creating bootable media for Raspberry Pi devices. 项目地址: https://gitcode.com/gh_mirrors/rp/rpi-imager …...