ROS学习第三十二节——xacro构建激光雷达小车
https://download.csdn.net/download/qq_45685327/87718396
在前面小车底盘基础之上,添加摄像头和雷达传感器。
0.底盘实现
deamo02_base.xacro
<!--使用 xacro 优化 URDF 版的小车底盘实现:实现思路:1.将一些常量、变量封装为 xacro:property比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 ....2.使用 宏 封装驱动轮以及支撑轮实现,调用相关宏生成驱动轮与支撑轮-->
<!-- 根标签,必须声明 xmlns:xacro -->
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- 封装变量、常量 --><xacro:property name="PI" value="3.141"/><!-- 宏:黑色设置 --><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material><!-- 底盘属性 --><xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint 半径 --><xacro:property name="base_link_radius" value="0.1" /> <!-- base_link 半径 --><xacro:property name="base_link_length" value="0.08" /> <!-- base_link 长 --><xacro:property name="earth_space" value="0.015" /> <!-- 离地间距 --><!-- 底盘 --><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.5 0.3 0.0 0.5" /></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_link_length / 2 }" /></joint><!-- 驱动轮 --><!-- 驱动轮属性 --><xacro:property name="wheel_radius" value="0.0325" /><!-- 半径 --><xacro:property name="wheel_length" value="0.015" /><!-- 宽度 --><!-- 驱动轮宏实现 --><xacro:macro name="add_wheels" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /><axis xyz="0 1 0" /></joint></xacro:macro><xacro:add_wheels name="left" flag="1" /><xacro:add_wheels name="right" flag="-1" /><!-- 支撑轮 --><!-- 支撑轮属性 --><xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 --><!-- 支撑轮宏 --><xacro:macro name="add_support_wheel" params="name flag" ><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" /><axis xyz="1 1 1" /></joint></xacro:macro><xacro:add_support_wheel name="front" flag="1" /><xacro:add_support_wheel name="back" flag="-1" /></robot>
1.摄像头和雷达 Xacro 文件实现
摄像头 xacro 文件:
deamo03_camera.xacro
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.01" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0.08" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0.0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><!-- 摄像头关节以及link --><link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint>
</robot>
雷达 xacro 文件:
deamo04_laser.xacro
<!--小车底盘添加雷达
-->
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 雷达支架 --><xacro:property name="support_length" value="0.15" /> <!-- 支架长度 --><xacro:property name="support_radius" value="0.01" /> <!-- 支架半径 --><xacro:property name="support_x" value="0.0" /> <!-- 支架安装的x坐标 --><xacro:property name="support_y" value="0.0" /> <!-- 支架安装的y坐标 --><xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" /> <!-- 支架安装的z坐标:底盘高度 / 2 + 支架高度 / 2 --><link name="support"><visual><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="red"><color rgba="0.8 0.2 0.0 0.8" /></material></visual></link><joint name="support2base_link" type="fixed"><parent link="base_link" /><child link="support" /><origin xyz="${support_x} ${support_y} ${support_z}" /></joint><!-- 雷达属性 --><xacro:property name="laser_length" value="0.05" /> <!-- 雷达长度 --><xacro:property name="laser_radius" value="0.03" /> <!-- 雷达半径 --><xacro:property name="laser_x" value="0.0" /> <!-- 雷达安装的x坐标 --><xacro:property name="laser_y" value="0.0" /> <!-- 雷达安装的y坐标 --><xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <!-- 雷达安装的z坐标:支架高度 / 2 + 雷达高度 / 2 --><!-- 雷达关节以及link --><link name="laser"><visual><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="laser2support" type="fixed"><parent link="support" /><child link="laser" /><origin xyz="${laser_x} ${laser_y} ${laser_z}" /></joint>
</robot>
2.组合底盘摄像头与雷达的 xacro 文件
deamo05_xacrocar.xacro
<!-- 组合小车底盘与摄像头与雷达 -->
<robot name="xacrocar" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="deamo02_base.xacro" /><xacro:include filename="deamo03_camera.xacro" /><xacro:include filename="deamo04_laser.xacro" />
</robot>
3.launch 文件
demo06_xacrocar.launch
<launch><param name="robot_description" textfile="$(find urdf01_rviz)/urdf/xacro/deamo05_xacrocar.urdf" /><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" /> <!-- 添加关节状态发布节点 --><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /><!-- 添加机器人状态发布节点 --><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /><!-- 可选:用于控制关节运动的节点 --><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /></launch>4.生成的urdf文件
deamo05_xacrocar.urdf
<?xml version="1.0" encoding="utf-8"?>
<!-- =================================================================================== -->
<!-- | This document was autogenerated by xacro from deamo05_xacrocar.xacro | -->
<!-- | EDITING THIS FILE BY HAND IS NOT RECOMMENDED | -->
<!-- =================================================================================== --><robot name="xacrocar"><material name="black"><color rgba="0.0 0.0 0.0 1.0"/></material><link name="base_footprint"><visual><geometry><sphere radius="0.001"/></geometry></visual></link><link name="base_link"><visual><geometry><cylinder length="0.08" radius="0.1"/></geometry><origin rpy="0 0 0" xyz="0 0 0"/><material name="yellow"><color rgba="0.5 0.3 0.0 0.5"/></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint"/><child link="base_link"/><origin xyz="0 0 0.055"/></joint><link name="left_wheel"><visual><geometry><cylinder length="0.015" radius="0.0325"/></geometry><origin rpy="1.5705 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="left_wheel2base_link" type="continuous"><parent link="base_link"/><child link="left_wheel"/><origin xyz="0 0.1 -0.0225"/><axis xyz="0 1 0"/></joint><link name="right_wheel"><visual><geometry><cylinder length="0.015" radius="0.0325"/></geometry><origin rpy="1.5705 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="right_wheel2base_link" type="continuous"><parent link="base_link"/><child link="right_wheel"/><origin xyz="0 -0.1 -0.0225"/><axis xyz="0 1 0"/></joint><link name="front_wheel"><visual><geometry><sphere radius="0.0075"/></geometry><origin rpy="0 0 0" xyz="0 0 0"/><material name="black"/></visual></link><joint name="front_wheel2base_link" type="continuous"><parent link="base_link"/><child link="front_wheel"/><origin xyz="0.0925 0 -0.0475"/><axis xyz="1 1 1"/></joint><link name="back_wheel"><visual><geometry><sphere radius="0.0075"/></geometry><origin rpy="0 0 0" xyz="0 0 0"/><material name="black"/></visual></link><joint name="back_wheel2base_link" type="continuous"><parent link="base_link"/><child link="back_wheel"/><origin xyz="-0.0925 0 -0.0475"/><axis xyz="1 1 1"/></joint><link name="camera"><visual><geometry><box size="0.01 0.025 0.025"/></geometry><origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link"/><child link="camera"/><origin xyz="0.08 0.0 0.0525"/></joint><link name="support"><visual><geometry><cylinder length="0.15" radius="0.01"/></geometry><origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="red"><color rgba="0.8 0.2 0.0 0.8"/></material></visual></link><joint name="support2base_link" type="fixed"><parent link="base_link"/><child link="support"/><origin xyz="0.0 0.0 0.115"/></joint><link name="laser"><visual><geometry><cylinder length="0.05" radius="0.03"/></geometry><origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="laser2support" type="fixed"><parent link="support"/><child link="laser"/><origin xyz="0.0 0.0 0.1"/></joint>
</robot>5.运行launch文件,查看效果
roslaunch urdf01_rviz demo06_xacrocar.launch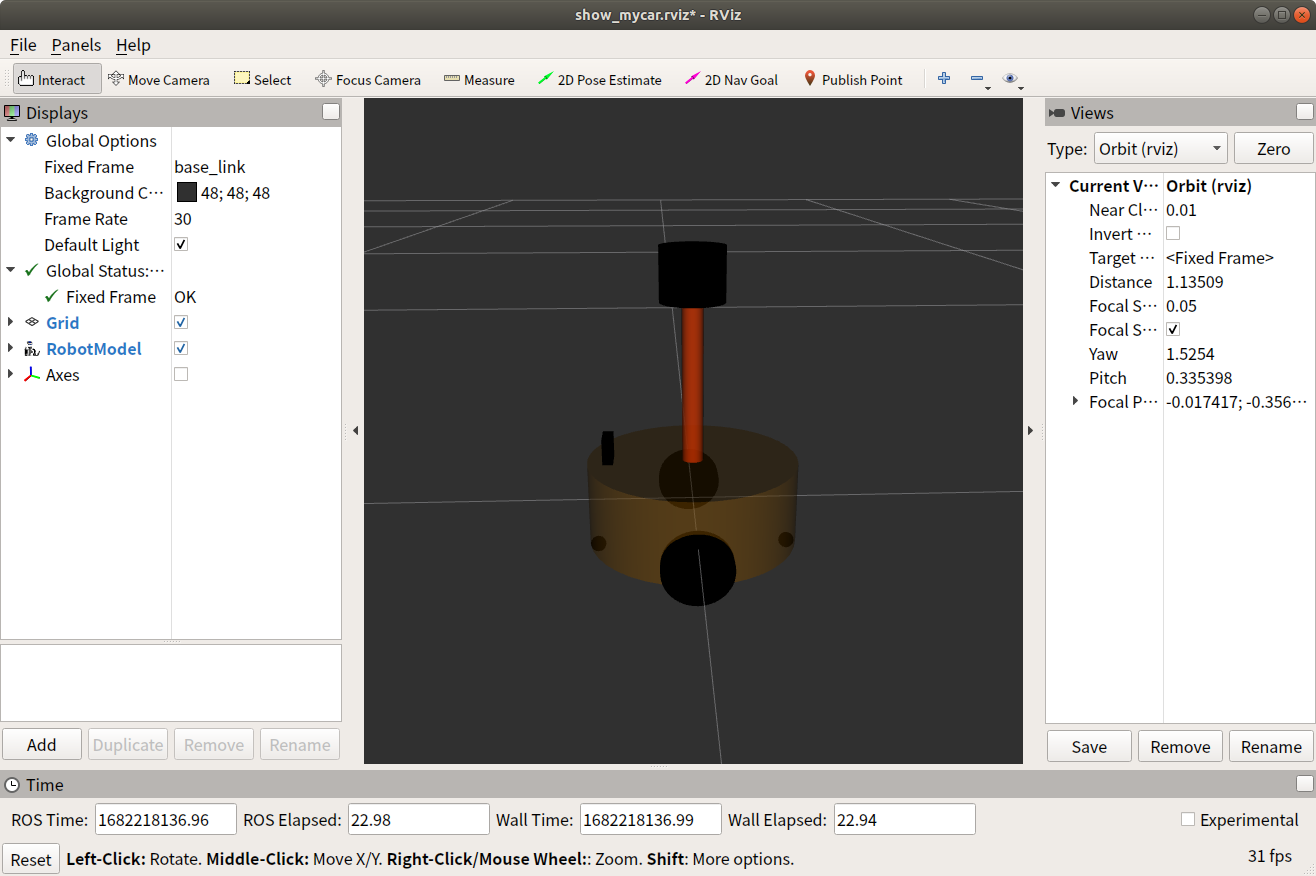
相关文章:
ROS学习第三十二节——xacro构建激光雷达小车
https://download.csdn.net/download/qq_45685327/87718396 在前面小车底盘基础之上,添加摄像头和雷达传感器。 0.底盘实现 deamo02_base.xacro <!--使用 xacro 优化 URDF 版的小车底盘实现:实现思路:1.将一些常量、变量封装为 xacro:property比如…...

中厂,面试就问了4道题,凉了!
你好,我是田哥 所谓的金三银四,已变成铜三铁四了。很多人基本上莫有面试机会,更可惜的是机会有了,却没有把握住。 加入我知识星球:免费做简历优化、简历包装、模拟面试... 今天早上,一个朋友和我说面试中被…...

22.轮播模块
学习要点: 1.轮播模块 本节课我们来开始了解 Layui 的内置模块:轮播模块。 一.轮播模块 1. 轮播模块,即跑马灯等轮播交互场景,先来看下基本设置; <div id"test" class"layui-carousel&qu…...

MYSQL命令小总结
一、创建查看 1.输入cmd,打开控制器,输入如下,打开MYSQL C:\Users\ASUS> mysql -u root -p 2.查看已有数据库 mysql> show databases; 3.建立数据库 4.使用数据库 use englishword;5.建立表单 CREATE TABLE user ( id INT primar…...

Java常见开发工具和Object类
Java是一种面向对象的编程语言,被广泛应用于各种应用程序和软件开发中。在Java开发过程中,使用一个好的开发工具可以大大提高开发效率和代码质量。Eclipse是一个功能强大、灵活易用的Java集成开发环境(IDE),被广泛使用…...
Linux 配置YUM源(FTP方式获取软件源、使用阿里云yum源、同时使用本地源与在线源)YUM获取安装包并生成YUM软件仓库
YUM介绍 YUM(yellow dog updater modified) 基于RPM包构建的软件更新机制 自动解决依赖关系 yum软件仓库集中管理软件包 RPM软件包的来源 centos发布的RPM包集合第三方组织发布的RPM包集合用户自定义的RPM包集合 软件仓库的提供方式 FTP服务:…...
Java版工程行业管理系统源码-专业的工程管理软件-提供一站式服务
Java版工程项目管理系统 Spring CloudSpring BootMybatisVueElementUI前后端分离 功能清单如下: 首页 工作台:待办工作、消息通知、预警信息,点击可进入相应的列表 项目进度图表:选择(总体或单个)项目显示…...
养老保障金查询系统【GUI/Swing+MySQL】(Java课设)
系统类型 Swing窗口类型Mysql数据库存储数据 使用范围 适合作为Java课设!!! 部署环境 jdk1.8Mysql8.0Idea或eclipsejdbc 运行效果 本系统源码地址:https://download.csdn.net/download/qq_50954361/87700421 更多系统资源库…...
国考省考行测:词句理解,词的对象指代,就近原则,主语一致法,语意语境分析上下文找出指代含义
国考省考行测:词句理解,词的对象指代,就近原则,主语一致法,语意语境分析上下文找出指代含义 2022找工作是学历、能力和运气的超强结合体! 公务员特招重点就是专业技能,附带行测和申论,而常规国…...

部署YUM仓库
部署YUM仓库 YUM概述软件仓库的提供方式RPM软件包的来源FTP源的配置方法本地源配置方法在线源配置方法本地源和在线源一起使用的方法数据包缓存方法 自己配置本地yum源时需要使用createrepo来生成依赖关系库 YUM概述 YUM(Yellow dog Updater Modified) 基于RPM包构建的软件更…...

SpringBoot框架(邮件发送Mail|持久层框架JPA|Extra前后端分离跨域处理|接口管理Swagger)这一篇就够了(超详细)
🙈作者简介:练习时长两年半的Java up主 🙉个人主页:老茶icon 🙊 ps:点赞👍是免费的,却可以让写博客的作者开兴好久好久😎 📚系列专栏:Java全栈,计…...

chatGPT对话R语言
文章目录 R语言介绍R语言基本语法R语言常用函数有哪些R语言数据结构向量矩阵数组和列表数组列表 数据框因子 R如何导入数据如何在R语言中导出数据?R语言图形绘制描述性统计描述统计也可以这样来计算 统计推断配对设计t检验样本均数和总体均数t检验两(独立…...

代码随想录--字符串--替换空格题型
①这道题可以直接申请一个临时数组,然后遍历字符串,是空格则加入20%,最后再把临时数组转化为字符串。 怎么把一个数组转化为字符串? 如数组arry[], string newstr new string(arry,0,arry.size()-1); return newstr; 而且临时数…...
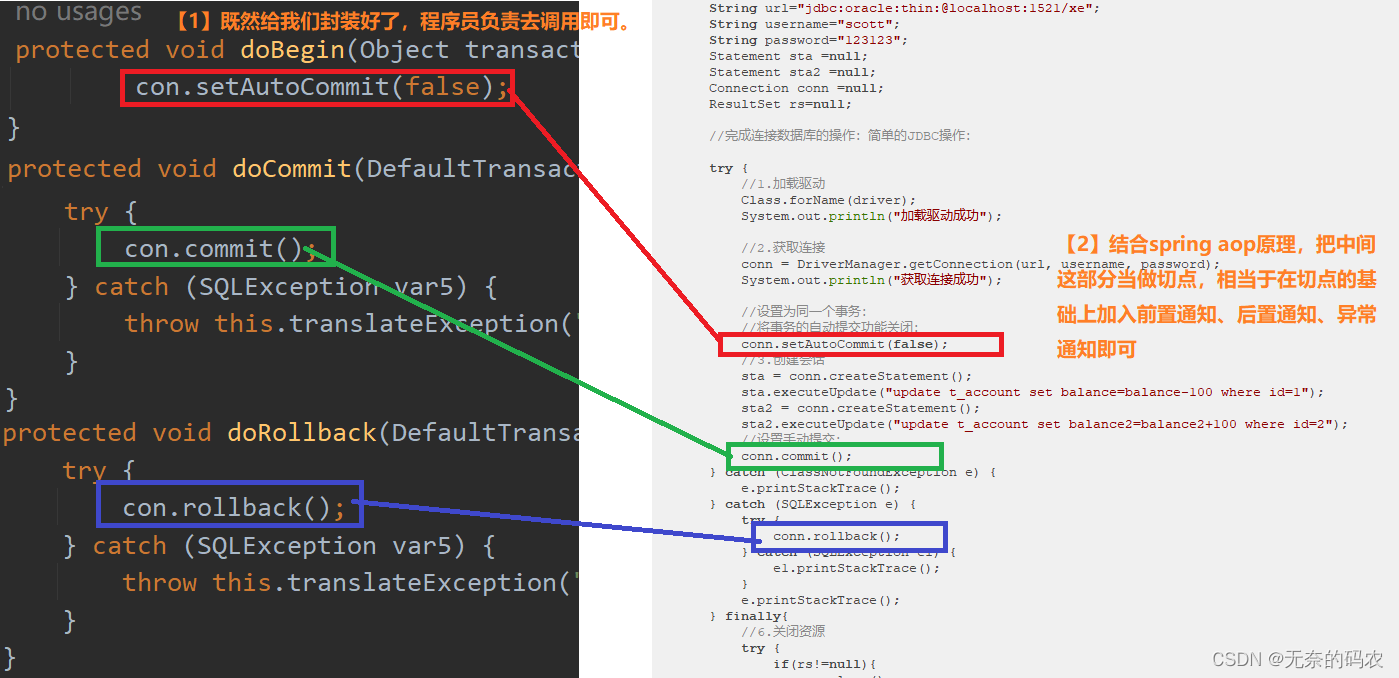
Spring JDBC和事务控制
目录 Spring JDBC 和 事务控制主要内容Spring 整合 JDBC 环境构建项目添加依赖坐标添加 jdbc 配置文件编写 spring 配置文件配置数据源C3P0 数据源配置DBCP 数据源配置 模板类配置Spring JDBC 测试 (入门)创建指定数据库创建数据表使用 JUnit 测试JUnit …...
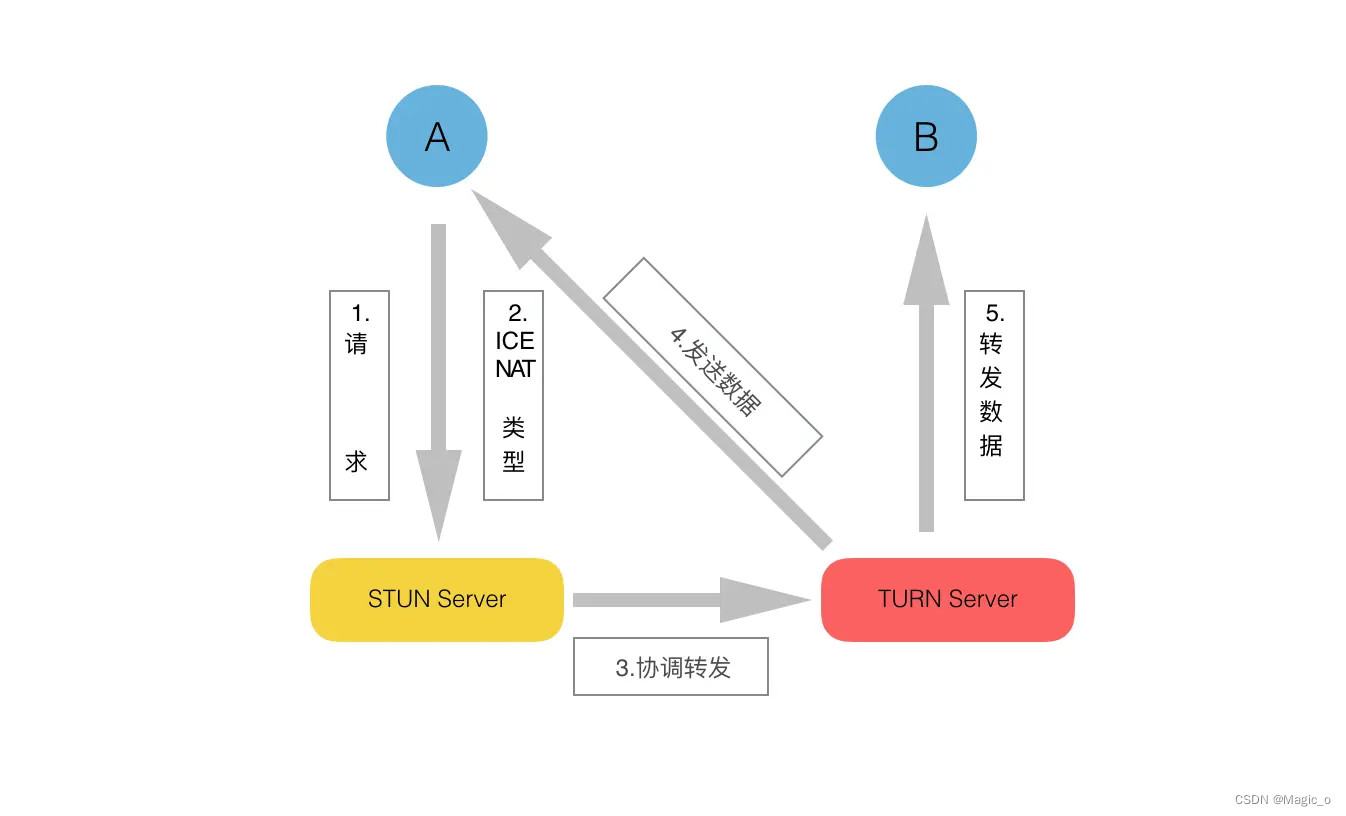
【音视频第16天】详解STUN协议
一个webRTC传输协议搞得自己云里雾里的。现在主动攻克一下。先看看STUN协议。好,我们开始吧 目录 1.讲讲什么是NAT?2.NAT有啥问题?3.四种NAT类型4.STUN Server5.TURN ServerSTUN和TURN的实现:什么是STUN?为什么需要ST…...
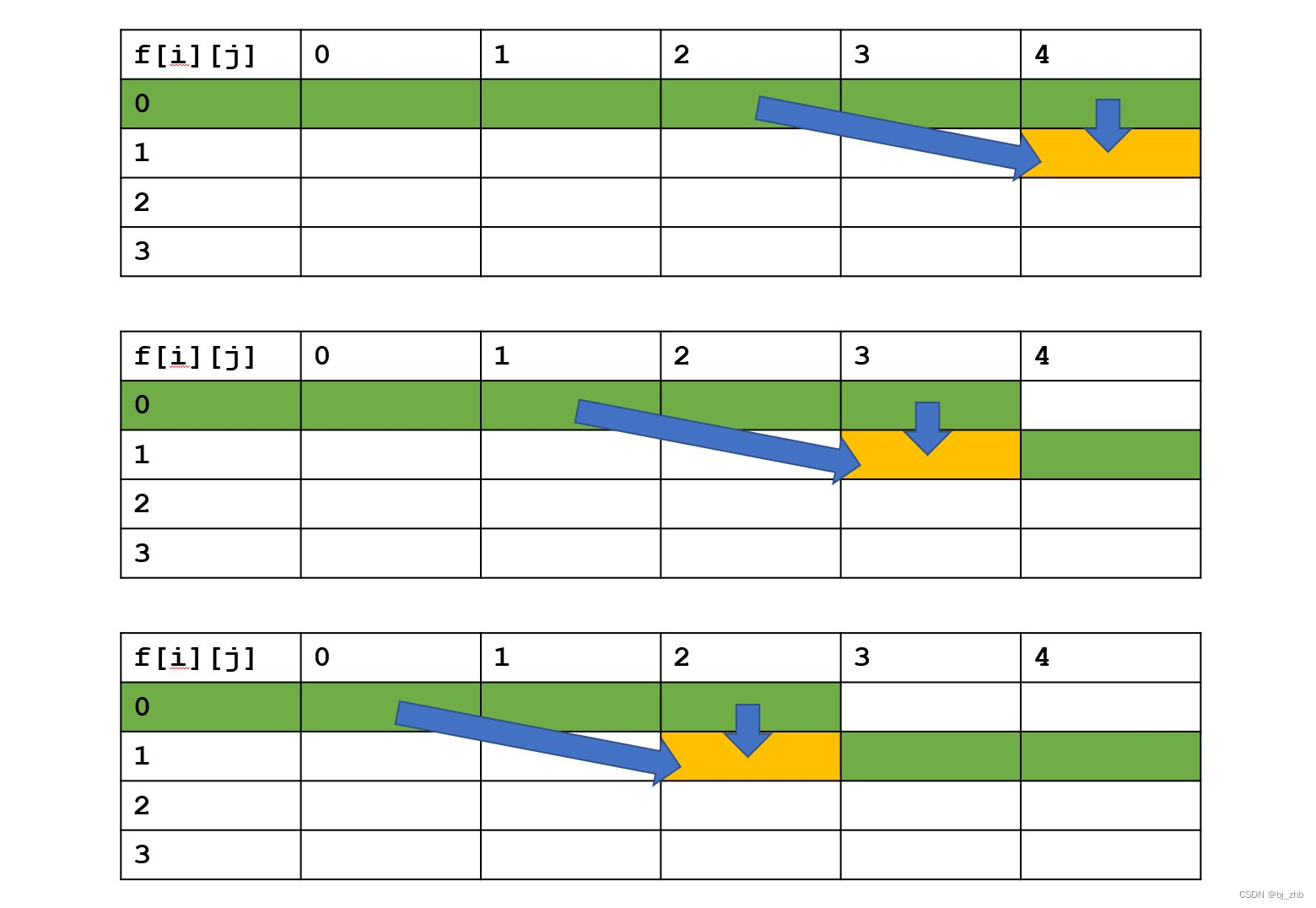
C++算法初级11——01背包问题(动态规划2)
C算法初级11——01背包问题(动态规划2) 文章目录 C算法初级11——01背包问题(动态规划2)问题引入0-1背包问题分析0-1背包问题的形式化分析优化 问题引入 辰辰采药 辰辰是个天资聪颖的孩子,他的梦想是成为世界上最伟大…...
)
Python 库大全(下)
格式化输出 模块 reprlib 提供了一份定制的 repr(),用于简洁 地展示各种大的或者多层嵌套的容器变量: >>> import reprlib >>> reprlib.repr(set(\supercalifragilisticexpialidocious\)) "{\a\, \c\, \d\, \e\, \f\, \g\, ...…...
如何用链表实现LRU缓存淘汰算法
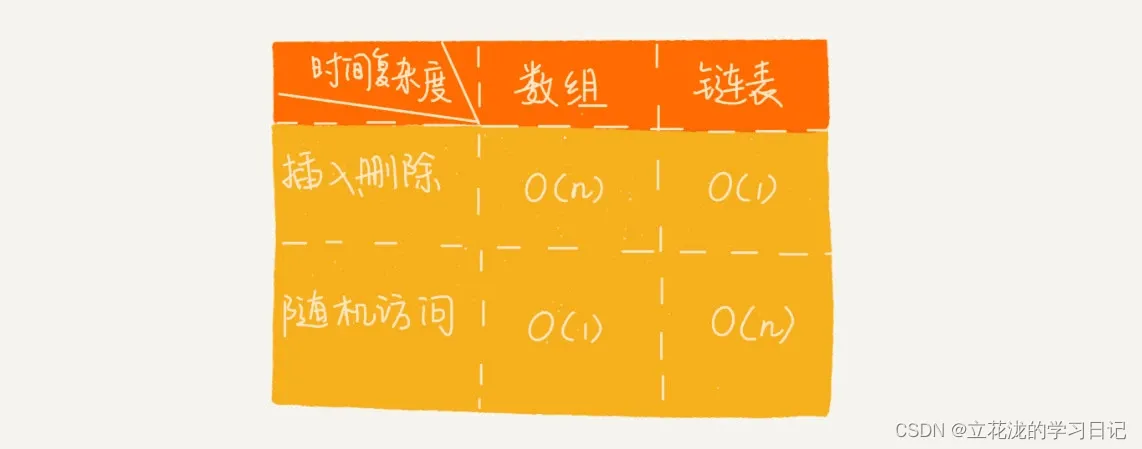
链表学习 一、 缓存1.1缓存介绍1.2 缓存策略 二、链表结构2.1 单链表2.2 循环链表2.3 双向链表2.4 双向循环链表2.5 链表与数组性能对比 三、如何基于链表实现LRU缓存淘汰算法 一、 缓存 1.1缓存介绍 缓存是一种提高数据读取性能的技术,在硬件设计、软件开发中都有…...

【01】数据结构与算法基础-数据、数据元素、数据项和数据对象 | 数据类型和抽象数据类型 | 抽象数据类型的表示和C++实现
目录) 0.数据结构的研究内容1.数据、数据元素、数据项和数据对象1.1数据1.2数据元素(Data element)和数据项1.3数据项1.4数据对象1.5数据结构(Data Structure)1.6逻辑结构的种类1.7存储结构的种类2.数据类型和抽象数据类型2.1数据类型(Data Type)2.2抽象数据类型(Abstract …...

PHP匿名类的使用场景有哪些?PHP匿名类怎么用?有什么好处?PHP匿名类如何在运行时动态生成?
以下是一些使用匿名类的场景: 2. 简单的工厂模式:当需要在运行时动态创建一些简单的对象时,可以使用匿名类替代创建不必要的类定义和文件。 function createGreeter($name) {return new class($name) {private $name;public function __cons…...

国产车规芯片崛起,如何用东软睿驰NeuSAR或经纬恒润方案快速适配?
国产车规芯片与AUTOSAR方案融合实战:从芯驰MCU到NeuSAR/经纬恒润的适配指南 当一颗国产车规级MCU遇上自主AUTOSAR基础软件,这场"中国芯"与"中国魂"的相遇,正在重构汽车电子开发的成本结构与技术生态。去年某新能源车企的…...

【ElevenLabs福建话语音落地实战】:20年语音AI专家亲授3大避坑指南与本地化部署全流程
更多请点击: https://codechina.net 第一章:ElevenLabs福建话语音落地的行业价值与技术定位 福建话(闽南语泉州/厦门腔)作为联合国教科文组织认定的“严重濒危语言”,其语音合成能力的工程化落地,已超越单…...

Android截图限制终极解决方案:如何绕过FLAG_SECURE实现自由截屏
Android截图限制终极解决方案:如何绕过FLAG_SECURE实现自由截屏 【免费下载链接】DisableFlagSecure 项目地址: https://gitcode.com/gh_mirrors/dis/DisableFlagSecure 你是否曾在使用银行APP时想要截屏保存交易记录,却发现屏幕一片漆黑&#x…...

3步搞定Photoshop图层批量导出:高效工具终极指南
3步搞定Photoshop图层批量导出:高效工具终极指南 【免费下载链接】Photoshop-Export-Layers-to-Files-Fast This script allows you to export your layers as individual files at a speed much faster than the built-in script from Adobe. 项目地址: https://…...

RK3588工业一体机开发实战:从硬件选型到AI部署的完整指南
1. 项目概述:为什么RK3588工业一体机是当前的热门选择?最近在跟几个做工业自动化、边缘计算的朋友聊天,发现大家不约而同地都在讨论基于瑞芯微RK3588芯片的工业一体机。这让我想起几年前,大家还在为工控机选型头疼——要么是X86架…...

openpilot深度解析:开源驾驶辅助系统的技术实现与架构设计
openpilot深度解析:开源驾驶辅助系统的技术实现与架构设计 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Tre…...

[特殊字符]️ 信创服务器深度解析:从CPU到操作系统,一文搞懂国产化替代全栈方案
标签:信创 国产化 服务器 CPU选型 海光 鲲鹏 🎯 开篇导读 你是否在国产化替代项目中不知道选哪款CPU?网上搜到的信创资料要么只讲政策不讲技术,要么直接给产品列表却不解释选型逻辑。本文将从信创服务器的四层架构(硬…...

Display Driver Uninstaller:彻底解决显卡驱动问题的专业工具指南
Display Driver Uninstaller:彻底解决显卡驱动问题的专业工具指南 【免费下载链接】display-drivers-uninstaller Display Driver Uninstaller (DDU) a driver removal utility / cleaner utility 项目地址: https://gitcode.com/gh_mirrors/di/display-drivers-u…...
终极指南:轻松解决TranslucentTB运行时依赖问题,让Windows任务栏完美透明化
终极指南:轻松解决TranslucentTB运行时依赖问题,让Windows任务栏完美透明化 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/Transluce…...

VSCode+GCC+OpenOCD:打造你的STM32专属OpenHarmony 3.1开发流水线
VSCodeGCCOpenOCD:构建STM32 OpenHarmony开发的高效流水线 在嵌入式开发领域,效率往往取决于工具链的整合程度。当OpenHarmony遇上STM32,如何摆脱传统IDE的束缚,打造一套现代化、可定制的开发环境?本文将带你从零搭建基…...