BetaFlight统一硬件配置文件研读之set命令
BetaFlight统一硬件配置文件研读之set命令
- 1. 源由
- 2. 代码分析
- 3. 实例分析
- 4. 配置情况
- 4.1 set
- 4.2 set parameter_name
- 4.3 set parameter_name value
- 5. 参考资料
统一硬件配置文件的设计是一种非常好的设计模式,可以将硬件和软件的工作进行解耦。
1. 源由
cli命令中set是对BetaFlight系统内部参量进行变量赋值的主要命令,主要可供设置的参数详见下面列表。
const clivalue_t valueTable[] = {
// PG_GYRO_CONFIG{ PARAM_NAME_GYRO_HARDWARE_LPF, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GYRO_HARDWARE_LPF }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_hardware_lpf) },#if defined(USE_GYRO_SPI_ICM20649){ "gyro_high_range", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_high_fsr) },
#endif{ PARAM_NAME_GYRO_LPF1_TYPE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GYRO_LPF_TYPE }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_lpf1_type) },{ PARAM_NAME_GYRO_LPF1_STATIC_HZ, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, LPF_MAX_HZ }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_lpf1_static_hz) },{ PARAM_NAME_GYRO_LPF2_TYPE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GYRO_LPF_TYPE }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_lpf2_type) },{ PARAM_NAME_GYRO_LPF2_STATIC_HZ, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, LPF_MAX_HZ }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_lpf2_static_hz) },{ "gyro_notch1_hz", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, LPF_MAX_HZ }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_soft_notch_hz_1) },{ "gyro_notch1_cutoff", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, LPF_MAX_HZ }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_soft_notch_cutoff_1) },{ "gyro_notch2_hz", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, LPF_MAX_HZ }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_soft_notch_hz_2) },{ "gyro_notch2_cutoff", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, LPF_MAX_HZ }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_soft_notch_cutoff_2) },{ "gyro_calib_duration", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 50, 3000 }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyroCalibrationDuration) },{ "gyro_calib_noise_limit", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 200 }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyroMovementCalibrationThreshold) },{ "gyro_offset_yaw", VAR_INT16 | MASTER_VALUE, .config.minmax = { -1000, 1000 }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_offset_yaw) },
#ifdef USE_GYRO_OVERFLOW_CHECK{ "gyro_overflow_detect", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GYRO_OVERFLOW_CHECK }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, checkOverflow) },
#endif
#ifdef USE_YAW_SPIN_RECOVERY{ "yaw_spin_recovery", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON_AUTO }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, yaw_spin_recovery) },{ "yaw_spin_threshold", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { YAW_SPIN_RECOVERY_THRESHOLD_MIN, YAW_SPIN_RECOVERY_THRESHOLD_MAX }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, yaw_spin_threshold) },
#endif#ifdef USE_MULTI_GYRO{ PARAM_NAME_GYRO_TO_USE, VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GYRO }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_to_use) },
#endif
#if defined(USE_DYN_NOTCH_FILTER){ PARAM_NAME_DYN_NOTCH_COUNT, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, DYN_NOTCH_COUNT_MAX }, PG_DYN_NOTCH_CONFIG, offsetof(dynNotchConfig_t, dyn_notch_count) },{ PARAM_NAME_DYN_NOTCH_Q, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 1000 }, PG_DYN_NOTCH_CONFIG, offsetof(dynNotchConfig_t, dyn_notch_q) },{ PARAM_NAME_DYN_NOTCH_MIN_HZ, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 20, 250 }, PG_DYN_NOTCH_CONFIG, offsetof(dynNotchConfig_t, dyn_notch_min_hz) },{ PARAM_NAME_DYN_NOTCH_MAX_HZ, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 200, 1000 }, PG_DYN_NOTCH_CONFIG, offsetof(dynNotchConfig_t, dyn_notch_max_hz) },
#endif
#ifdef USE_DYN_LPF{ "gyro_lpf1_dyn_min_hz", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, DYN_LPF_MAX_HZ }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_lpf1_dyn_min_hz) },{ "gyro_lpf1_dyn_max_hz", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, DYN_LPF_MAX_HZ }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_lpf1_dyn_max_hz) },{ "gyro_lpf1_dyn_expo", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 10 }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_lpf1_dyn_expo) },
#endif{ "gyro_filter_debug_axis", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GYRO_FILTER_DEBUG }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, gyro_filter_debug_axis) },// PG_ACCELEROMETER_CONFIG
#if defined(USE_ACC){ PARAM_NAME_ACC_HARDWARE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_ACC_HARDWARE }, PG_ACCELEROMETER_CONFIG, offsetof(accelerometerConfig_t, acc_hardware) },
#if defined(USE_GYRO_SPI_ICM20649){ "acc_high_range", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_ACCELEROMETER_CONFIG, offsetof(accelerometerConfig_t, acc_high_fsr) },
#endif{ PARAM_NAME_ACC_LPF_HZ, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 500 }, PG_ACCELEROMETER_CONFIG, offsetof(accelerometerConfig_t, acc_lpf_hz) },{ "acc_trim_pitch", VAR_INT16 | MASTER_VALUE, .config.minmax = { -300, 300 }, PG_ACCELEROMETER_CONFIG, offsetof(accelerometerConfig_t, accelerometerTrims.values.pitch) },{ "acc_trim_roll", VAR_INT16 | MASTER_VALUE, .config.minmax = { -300, 300 }, PG_ACCELEROMETER_CONFIG, offsetof(accelerometerConfig_t, accelerometerTrims.values.roll) },// 4 elements are output for the ACC calibration - The 3 axis values and the 4th representing whether calibration has been performed{ "acc_calibration", VAR_INT16 | MASTER_VALUE | MODE_ARRAY, .config.array.length = 4, PG_ACCELEROMETER_CONFIG, offsetof(accelerometerConfig_t, accZero.raw) },
#endif// PG_COMPASS_CONFIG
#ifdef USE_MAG{ "align_mag", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_ALIGNMENT }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_alignment) },{ "mag_align_roll", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_customAlignment.roll) },{ "mag_align_pitch", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_customAlignment.pitch) },{ "mag_align_yaw", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_customAlignment.yaw) },{ "mag_bustype", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_BUS_TYPE }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_busType) },{ "mag_i2c_device", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, I2CDEV_COUNT }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_i2c_device) },{ "mag_i2c_address", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, I2C_ADDR7_MAX }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_i2c_address) },{ "mag_spi_device", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, SPIDEV_COUNT }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_spi_device) },{ PARAM_NAME_MAG_HARDWARE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_MAG_HARDWARE }, PG_COMPASS_CONFIG, offsetof(compassConfig_t, mag_hardware) },{ "mag_calibration", VAR_INT16 | MASTER_VALUE | MODE_ARRAY, .config.array.length = XYZ_AXIS_COUNT, PG_COMPASS_CONFIG, offsetof(compassConfig_t, magZero.raw) },
#endif// PG_BAROMETER_CONFIG
#ifdef USE_BARO{ "baro_bustype", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_BUS_TYPE }, PG_BAROMETER_CONFIG, offsetof(barometerConfig_t, baro_busType) },{ "baro_spi_device", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, 5 }, PG_BAROMETER_CONFIG, offsetof(barometerConfig_t, baro_spi_device) },{ "baro_i2c_device", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, 5 }, PG_BAROMETER_CONFIG, offsetof(barometerConfig_t, baro_i2c_device) },{ "baro_i2c_address", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, I2C_ADDR7_MAX }, PG_BAROMETER_CONFIG, offsetof(barometerConfig_t, baro_i2c_address) },{ PARAM_NAME_BARO_HARDWARE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_BARO_HARDWARE }, PG_BAROMETER_CONFIG, offsetof(barometerConfig_t, baro_hardware) },
#endif// PG_RX_CONFIG{ "mid_rc", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 1200, 1700 }, PG_RX_CONFIG, offsetof(rxConfig_t, midrc) },{ "min_check", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, mincheck) },{ "max_check", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, maxcheck) },{ "rssi_channel", VAR_INT8 | MASTER_VALUE, .config.minmax = { 0, MAX_SUPPORTED_RC_CHANNEL_COUNT }, PG_RX_CONFIG, offsetof(rxConfig_t, rssi_channel) },{ "rssi_src_frame_errors", VAR_INT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, rssi_src_frame_errors) },{ "rssi_scale", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { RSSI_SCALE_MIN, RSSI_SCALE_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rssi_scale) },{ "rssi_offset", VAR_INT8 | MASTER_VALUE, .config.minmax = { -100, 100 }, PG_RX_CONFIG, offsetof(rxConfig_t, rssi_offset) },{ "rssi_invert", VAR_INT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, rssi_invert) },{ "rssi_src_frame_lpf_period", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rssi_src_frame_lpf_period) },{ "rssi_smoothing", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rssi_smoothing) },#ifdef USE_RC_SMOOTHING_FILTER{ PARAM_NAME_RC_SMOOTHING, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, rc_smoothing_mode) },{ PARAM_NAME_RC_SMOOTHING_AUTO_FACTOR, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { RC_SMOOTHING_AUTO_FACTOR_MIN, RC_SMOOTHING_AUTO_FACTOR_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rc_smoothing_auto_factor_rpy) },{ PARAM_NAME_RC_SMOOTHING_AUTO_FACTOR_THROTTLE, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { RC_SMOOTHING_AUTO_FACTOR_MIN, RC_SMOOTHING_AUTO_FACTOR_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rc_smoothing_auto_factor_throttle) },{ PARAM_NAME_RC_SMOOTHING_SETPOINT_CUTOFF, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rc_smoothing_setpoint_cutoff) },{ PARAM_NAME_RC_SMOOTHING_FEEDFORWARD_CUTOFF, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rc_smoothing_feedforward_cutoff) },{ PARAM_NAME_RC_SMOOTHING_THROTTLE_CUTOFF, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rc_smoothing_throttle_cutoff) },{ PARAM_NAME_RC_SMOOTHING_DEBUG_AXIS, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_RC_SMOOTHING_DEBUG }, PG_RX_CONFIG, offsetof(rxConfig_t, rc_smoothing_debug_axis) },
#endif // USE_RC_SMOOTHING_FILTER{ "fpv_mix_degrees", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 90 }, PG_RX_CONFIG, offsetof(rxConfig_t, fpvCamAngleDegrees) },{ "max_aux_channels", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, MAX_AUX_CHANNEL_COUNT }, PG_RX_CONFIG, offsetof(rxConfig_t, max_aux_channel) },
#ifdef USE_SERIALRX{ PARAM_NAME_SERIAL_RX_PROVIDER, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_SERIAL_RX }, PG_RX_CONFIG, offsetof(rxConfig_t, serialrx_provider) },{ "serialrx_inverted", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, serialrx_inverted) },
#endif
#ifdef USE_SPEKTRUM_BIND{ "spektrum_sat_bind", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { SPEKTRUM_SAT_BIND_DISABLED, SPEKTRUM_SAT_BIND_MAX}, PG_RX_CONFIG, offsetof(rxConfig_t, spektrum_sat_bind) },{ "spektrum_sat_bind_autoreset", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, spektrum_sat_bind_autoreset) },
#endif
#ifdef USE_SERIALRX_SRXL2{ "srxl2_unit_id", VAR_UINT8 | MASTER_VALUE, .config.minmax = { 0, 0xf }, PG_RX_CONFIG, offsetof(rxConfig_t, srxl2_unit_id) },{ "srxl2_baud_fast", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, srxl2_baud_fast) },
#endif
#if defined(USE_SERIALRX_SBUS){ "sbus_baud_fast", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, sbus_baud_fast) },
#endif
#if defined(USE_CRSF_V3){ "crsf_use_negotiated_baud", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, crsf_use_negotiated_baud) },
#endif{ "airmode_start_throttle_percent", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_RX_CONFIG, offsetof(rxConfig_t, airModeActivateThreshold) },{ "rx_min_usec", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rx_min_usec) },{ "rx_max_usec", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_RX_CONFIG, offsetof(rxConfig_t, rx_max_usec) },{ "serialrx_halfduplex", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CONFIG, offsetof(rxConfig_t, halfDuplex) },
#if defined(USE_RX_MSP_OVERRIDE){ "msp_override_channels_mask", VAR_UINT32 | MASTER_VALUE, .config.u32Max = (1 << MAX_SUPPORTED_RC_CHANNEL_COUNT) - 1, PG_RX_CONFIG, offsetof(rxConfig_t, msp_override_channels_mask)},
#endif
#ifdef USE_RX_SPI{ "rx_spi_protocol", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_RX_SPI }, PG_RX_SPI_CONFIG, offsetof(rxSpiConfig_t, rx_spi_protocol) },{ "rx_spi_bus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, SPIDEV_COUNT }, PG_RX_SPI_CONFIG, offsetof(rxSpiConfig_t, spibus) },{ "rx_spi_led_inversion", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_SPI_CONFIG, offsetof(rxSpiConfig_t, ledInversion) },
#endif// PG_ADC_CONFIG
#if defined(USE_ADC){ "adc_device", VAR_INT8 | HARDWARE_VALUE, .config.minmax = { 0, ADCDEV_COUNT }, PG_ADC_CONFIG, offsetof(adcConfig_t, device) },{ "adc_vrefint_calibration", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 2000 }, PG_ADC_CONFIG, offsetof(adcConfig_t, vrefIntCalibration) },{ "adc_tempsensor_calibration30", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 2000 }, PG_ADC_CONFIG, offsetof(adcConfig_t, tempSensorCalibration1) },{ "adc_tempsensor_calibration110", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 2000 }, PG_ADC_CONFIG, offsetof(adcConfig_t, tempSensorCalibration2) },
#endif// PG_PWM_CONFIG
#if defined(USE_RX_PWM){ "input_filtering_mode", VAR_INT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PWM_CONFIG, offsetof(pwmConfig_t, inputFilteringMode) },
#endif// PG_BLACKBOX_CONFIG
#ifdef USE_BLACKBOX{ "blackbox_sample_rate", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_BLACKBOX_SAMPLE_RATE }, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, sample_rate) },{ "blackbox_device", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_BLACKBOX_DEVICE }, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, device) },{ "blackbox_disable_pids", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_PID, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },{ "blackbox_disable_rc", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_RC_COMMANDS, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },{ "blackbox_disable_setpoint", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_SETPOINT, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },{ "blackbox_disable_bat", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_BATTERY, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },
#ifdef USE_MAG{ "blackbox_disable_mag", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_MAG, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },
#endif
#if defined(USE_BARO) || defined(USE_RANGEFINDER){ "blackbox_disable_alt", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_ALTITUDE, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },
#endif{ "blackbox_disable_rssi", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_RSSI, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },{ "blackbox_disable_gyro", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_GYRO, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },
#if defined(USE_ACC){ "blackbox_disable_acc", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_ACC, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },
#endif{ "blackbox_disable_debug", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_DEBUG_LOG, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },{ "blackbox_disable_motors", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_MOTOR, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },
#ifdef USE_GPS{ "blackbox_disable_gps", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = FLIGHT_LOG_FIELD_SELECT_GPS, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, fields_disabled_mask) },
#endif{ "blackbox_mode", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_BLACKBOX_MODE }, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, mode) },{ "blackbox_high_resolution", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_BLACKBOX_CONFIG, offsetof(blackboxConfig_t, high_resolution) },
#endif// PG_MOTOR_CONFIG{ "min_throttle", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, minthrottle) },{ "max_throttle", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, maxthrottle) },{ "min_command", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, mincommand) },
#ifdef USE_DSHOT{ PARAM_NAME_DSHOT_IDLE_VALUE, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 2000 }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, digitalIdleOffsetValue) },
#ifdef USE_DSHOT_DMAR{ "dshot_burst", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON_AUTO }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.useBurstDshot) },
#endif
#ifdef USE_DSHOT_TELEMETRY{ PARAM_NAME_DSHOT_BIDIR, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.useDshotTelemetry) },{ "dshot_edt", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.useDshotEdt) },
#endif
#ifdef USE_DSHOT_BITBANG{ "dshot_bitbang", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON_AUTO }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.useDshotBitbang) },{ "dshot_bitbang_timer", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_DSHOT_BITBANGED_TIMER }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.useDshotBitbangedTimer) },
#endif
#endif{ PARAM_NAME_USE_UNSYNCED_PWM, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.useUnsyncedPwm) },{ PARAM_NAME_MOTOR_PWM_PROTOCOL, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_MOTOR_PWM_PROTOCOL }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.motorPwmProtocol) },{ PARAM_NAME_MOTOR_PWM_RATE, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 200, 32000 }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.motorPwmRate) },{ "motor_pwm_inversion", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.motorPwmInversion) },{ PARAM_NAME_MOTOR_POLES, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 4, UINT8_MAX }, PG_MOTOR_CONFIG, offsetof(motorConfig_t, motorPoleCount) },{ "motor_output_reordering", VAR_UINT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = MAX_SUPPORTED_MOTORS, PG_MOTOR_CONFIG, offsetof(motorConfig_t, dev.motorOutputReordering)},// PG_THROTTLE_CORRECTION_CONFIG{ "thr_corr_value", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 150 }, PG_THROTTLE_CORRECTION_CONFIG, offsetof(throttleCorrectionConfig_t, throttle_correction_value) },{ "thr_corr_angle", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 900 }, PG_THROTTLE_CORRECTION_CONFIG, offsetof(throttleCorrectionConfig_t, throttle_correction_angle) },// PG_FAILSAFE_CONFIG{ "failsafe_delay", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { PERIOD_RXDATA_RECOVERY / MILLIS_PER_TENTH_SECOND, 200 }, PG_FAILSAFE_CONFIG, offsetof(failsafeConfig_t, failsafe_delay) },{ "failsafe_off_delay", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 200 }, PG_FAILSAFE_CONFIG, offsetof(failsafeConfig_t, failsafe_off_delay) },{ "failsafe_throttle", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_FAILSAFE_CONFIG, offsetof(failsafeConfig_t, failsafe_throttle) },{ "failsafe_switch_mode", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_FAILSAFE_SWITCH_MODE }, PG_FAILSAFE_CONFIG, offsetof(failsafeConfig_t, failsafe_switch_mode) },{ "failsafe_throttle_low_delay",VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 300 }, PG_FAILSAFE_CONFIG, offsetof(failsafeConfig_t, failsafe_throttle_low_delay) },{ "failsafe_procedure", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_FAILSAFE }, PG_FAILSAFE_CONFIG, offsetof(failsafeConfig_t, failsafe_procedure) },{ "failsafe_recovery_delay", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 200 }, PG_FAILSAFE_CONFIG, offsetof(failsafeConfig_t, failsafe_recovery_delay) },{ "failsafe_stick_threshold", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 50 }, PG_FAILSAFE_CONFIG, offsetof(failsafeConfig_t, failsafe_stick_threshold) },// PG_BOARDALIGNMENT_CONFIG{ "align_board_roll", VAR_INT16 | MASTER_VALUE, .config.minmax = { -180, 360 }, PG_BOARD_ALIGNMENT, offsetof(boardAlignment_t, rollDegrees) },{ "align_board_pitch", VAR_INT16 | MASTER_VALUE, .config.minmax = { -180, 360 }, PG_BOARD_ALIGNMENT, offsetof(boardAlignment_t, pitchDegrees) },{ "align_board_yaw", VAR_INT16 | MASTER_VALUE, .config.minmax = { -180, 360 }, PG_BOARD_ALIGNMENT, offsetof(boardAlignment_t, yawDegrees) },// PG_GIMBAL_CONFIG
#ifdef USE_SERVOS{ "gimbal_mode", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GIMBAL_MODE }, PG_GIMBAL_CONFIG, offsetof(gimbalConfig_t, mode) },
#endif// PG_BATTERY_CONFIG{ "bat_capacity", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 20000 }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, batteryCapacity) },{ "vbat_max_cell_voltage", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { VBAT_CELL_VOTAGE_RANGE_MIN, VBAT_CELL_VOTAGE_RANGE_MAX }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatmaxcellvoltage) },{ "vbat_full_cell_voltage", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { VBAT_CELL_VOTAGE_RANGE_MIN, VBAT_CELL_VOTAGE_RANGE_MAX }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatfullcellvoltage) },{ "vbat_min_cell_voltage", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { VBAT_CELL_VOTAGE_RANGE_MIN, VBAT_CELL_VOTAGE_RANGE_MAX }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatmincellvoltage) },{ "vbat_warning_cell_voltage", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { VBAT_CELL_VOTAGE_RANGE_MIN, VBAT_CELL_VOTAGE_RANGE_MAX }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatwarningcellvoltage) },{ "vbat_hysteresis", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 250 }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbathysteresis) },{ "current_meter", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_CURRENT_METER }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, currentMeterSource) },{ "battery_meter", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_VOLTAGE_METER }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, voltageMeterSource) },{ "vbat_detect_cell_voltage", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 2000 }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatnotpresentcellvoltage) },{ "use_vbat_alerts", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, useVBatAlerts) },{ "use_cbat_alerts", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, useConsumptionAlerts) },{ "cbat_alert_percent", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, consumptionWarningPercentage) },{ "vbat_cutoff_percent", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, lvcPercentage) },{ "force_battery_cell_count", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 24 }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, forceBatteryCellCount) },{ "vbat_display_lpf_period", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, UINT8_MAX }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatDisplayLpfPeriod) },
#if defined(USE_BATTERY_VOLTAGE_SAG_COMPENSATION){ "vbat_sag_lpf_period", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, UINT8_MAX }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatSagLpfPeriod) },
#endif{ "ibat_lpf_period", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, ibatLpfPeriod) },{ "vbat_duration_for_warning", VAR_UINT8 | MASTER_VALUE, .config.minmax = { 0, 150 }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatDurationForWarning) },{ "vbat_duration_for_critical", VAR_UINT8 | MASTER_VALUE, .config.minmax = { 0, 150 }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, vbatDurationForCritical) },// PG_VOLTAGE_SENSOR_ADC_CONFIG{ "vbat_scale", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { VBAT_SCALE_MIN, VBAT_SCALE_MAX }, PG_VOLTAGE_SENSOR_ADC_CONFIG, offsetof(voltageSensorADCConfig_t, vbatscale) },{ "vbat_divider", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { VBAT_DIVIDER_MIN, VBAT_DIVIDER_MAX }, PG_VOLTAGE_SENSOR_ADC_CONFIG, offsetof(voltageSensorADCConfig_t, vbatresdivval) },{ "vbat_multiplier", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { VBAT_MULTIPLIER_MIN, VBAT_MULTIPLIER_MAX }, PG_VOLTAGE_SENSOR_ADC_CONFIG, offsetof(voltageSensorADCConfig_t, vbatresdivmultiplier) },// PG_CURRENT_SENSOR_ADC_CONFIG{ "ibata_scale", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -16000, 16000 }, PG_CURRENT_SENSOR_ADC_CONFIG, offsetof(currentSensorADCConfig_t, scale) },{ "ibata_offset", VAR_INT16 | MASTER_VALUE, .config.minmax = { -32000, 32000 }, PG_CURRENT_SENSOR_ADC_CONFIG, offsetof(currentSensorADCConfig_t, offset) },
// PG_CURRENT_SENSOR_ADC_CONFIG
#ifdef USE_VIRTUAL_CURRENT_METER{ "ibatv_scale", VAR_INT16 | MASTER_VALUE, .config.minmax = { -16000, 16000 }, PG_CURRENT_SENSOR_VIRTUAL_CONFIG, offsetof(currentSensorVirtualConfig_t, scale) },{ "ibatv_offset", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 16000 }, PG_CURRENT_SENSOR_VIRTUAL_CONFIG, offsetof(currentSensorVirtualConfig_t, offset) },
#endif
#ifdef USE_BATTERY_CONTINUE{ "battery_continue", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_BATTERY_CONFIG, offsetof(batteryConfig_t, isBatteryContinueEnabled) },
#endif#ifdef USE_BEEPER
// PG_BEEPER_DEV_CONFIG{ "beeper_inversion", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_BEEPER_DEV_CONFIG, offsetof(beeperDevConfig_t, isInverted) },{ "beeper_od", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_BEEPER_DEV_CONFIG, offsetof(beeperDevConfig_t, isOpenDrain) },{ "beeper_frequency", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { 0, 16000 }, PG_BEEPER_DEV_CONFIG, offsetof(beeperDevConfig_t, frequency) },// PG_BEEPER_CONFIG
#ifdef USE_DSHOT{ "beeper_dshot_beacon_tone", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = {1, DSHOT_CMD_BEACON5 }, PG_BEEPER_CONFIG, offsetof(beeperConfig_t, dshotBeaconTone) },
#endif
#endif // USE_BEEPER// PG_MIXER_CONFIG{ "yaw_motors_reversed", VAR_INT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MIXER_CONFIG, offsetof(mixerConfig_t, yaw_motors_reversed) },{ "mixer_type", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_MIXER_TYPE }, PG_MIXER_CONFIG, offsetof(mixerConfig_t, mixer_type) },{ "crashflip_motor_percent", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_MIXER_CONFIG, offsetof(mixerConfig_t, crashflip_motor_percent) },{ "crashflip_expo", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_MIXER_CONFIG, offsetof(mixerConfig_t, crashflip_expo) },// PG_MOTOR_3D_CONFIG{ "3d_deadband_low", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_RANGE_MIDDLE }, PG_MOTOR_3D_CONFIG, offsetof(flight3DConfig_t, deadband3d_low) },{ "3d_deadband_high", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_RANGE_MIDDLE, PWM_PULSE_MAX }, PG_MOTOR_3D_CONFIG, offsetof(flight3DConfig_t, deadband3d_high) },{ "3d_neutral", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_MOTOR_3D_CONFIG, offsetof(flight3DConfig_t, neutral3d) },{ "3d_deadband_throttle", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 100 }, PG_MOTOR_3D_CONFIG, offsetof(flight3DConfig_t, deadband3d_throttle) },{ "3d_limit_low", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_RANGE_MIDDLE }, PG_MOTOR_3D_CONFIG, offsetof(flight3DConfig_t, limit3d_low) },{ "3d_limit_high", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_RANGE_MIDDLE, PWM_PULSE_MAX }, PG_MOTOR_3D_CONFIG, offsetof(flight3DConfig_t, limit3d_high) },{ "3d_switched_mode", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MOTOR_3D_CONFIG, offsetof(flight3DConfig_t, switched_mode3d) },// PG_SERVO_CONFIG
#ifdef USE_SERVOS{ "servo_center_pulse", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_SERVO_CONFIG, offsetof(servoConfig_t, dev.servoCenterPulse) },{ "servo_pwm_rate", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 50, 498 }, PG_SERVO_CONFIG, offsetof(servoConfig_t, dev.servoPwmRate) },{ "servo_lowpass_hz", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 400}, PG_SERVO_CONFIG, offsetof(servoConfig_t, servo_lowpass_freq) },{ "tri_unarmed_servo", VAR_INT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_SERVO_CONFIG, offsetof(servoConfig_t, tri_unarmed_servo) },{ "channel_forwarding_start", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { AUX1, MAX_SUPPORTED_RC_CHANNEL_COUNT }, PG_SERVO_CONFIG, offsetof(servoConfig_t, channelForwardingStartChannel) },
#endif// PG_CONTROLRATE_PROFILES
#ifdef USE_PROFILE_NAMES{ "rateprofile_name", VAR_UINT8 | PROFILE_RATE_VALUE | MODE_STRING, .config.string = { 1, MAX_RATE_PROFILE_NAME_LENGTH, STRING_FLAGS_NONE }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, profileName) },
#endif{ PARAM_NAME_THR_MID, VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, thrMid8) },{ PARAM_NAME_THR_EXPO, VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, thrExpo8) },{ PARAM_NAME_RATES_TYPE, VAR_UINT8 | PROFILE_RATE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_RATES_TYPE }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rates_type) },{ "quickrates_rc_expo", VAR_UINT8 | PROFILE_RATE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, quickRatesRcExpo) },{ "roll_rc_rate", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 1, CONTROL_RATE_CONFIG_RC_RATES_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rcRates[FD_ROLL]) },{ "pitch_rc_rate", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 1, CONTROL_RATE_CONFIG_RC_RATES_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rcRates[FD_PITCH]) },{ "yaw_rc_rate", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 1, CONTROL_RATE_CONFIG_RC_RATES_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rcRates[FD_YAW]) },{ "roll_expo", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 0, CONTROL_RATE_CONFIG_RC_EXPO_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rcExpo[FD_ROLL]) },{ "pitch_expo", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 0, CONTROL_RATE_CONFIG_RC_EXPO_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rcExpo[FD_PITCH]) },{ "yaw_expo", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 0, CONTROL_RATE_CONFIG_RC_EXPO_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rcExpo[FD_YAW]) },{ "roll_srate", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 0, CONTROL_RATE_CONFIG_RATE_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rates[FD_ROLL]) },{ "pitch_srate", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 0, CONTROL_RATE_CONFIG_RATE_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rates[FD_PITCH]) },{ "yaw_srate", VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 0, CONTROL_RATE_CONFIG_RATE_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rates[FD_YAW]) },{ PARAM_NAME_THROTTLE_LIMIT_TYPE, VAR_UINT8 | PROFILE_RATE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_THROTTLE_LIMIT_TYPE }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, throttle_limit_type) },{ PARAM_NAME_THROTTLE_LIMIT_PERCENT, VAR_UINT8 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { 25, 100 }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, throttle_limit_percent) },{ "roll_rate_limit", VAR_UINT16 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { CONTROL_RATE_CONFIG_RATE_LIMIT_MIN, CONTROL_RATE_CONFIG_RATE_LIMIT_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rate_limit[FD_ROLL]) },{ "pitch_rate_limit", VAR_UINT16 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { CONTROL_RATE_CONFIG_RATE_LIMIT_MIN, CONTROL_RATE_CONFIG_RATE_LIMIT_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rate_limit[FD_PITCH]) },{ "yaw_rate_limit", VAR_UINT16 | PROFILE_RATE_VALUE, .config.minmaxUnsigned = { CONTROL_RATE_CONFIG_RATE_LIMIT_MIN, CONTROL_RATE_CONFIG_RATE_LIMIT_MAX }, PG_CONTROL_RATE_PROFILES, offsetof(controlRateConfig_t, rate_limit[FD_YAW]) },// PG_SERIAL_CONFIG{ "reboot_character", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 48, 126 }, PG_SERIAL_CONFIG, offsetof(serialConfig_t, reboot_character) },{ "serial_update_rate_hz", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 100, 2000 }, PG_SERIAL_CONFIG, offsetof(serialConfig_t, serial_update_rate_hz) },// PG_IMU_CONFIG{ "imu_dcm_kp", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 32000 }, PG_IMU_CONFIG, offsetof(imuConfig_t, dcm_kp) },{ "imu_dcm_ki", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 32000 }, PG_IMU_CONFIG, offsetof(imuConfig_t, dcm_ki) },{ "small_angle", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 180 }, PG_IMU_CONFIG, offsetof(imuConfig_t, small_angle) },{ "imu_process_denom", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 4 }, PG_IMU_CONFIG, offsetof(imuConfig_t, imu_process_denom) },// PG_ARMING_CONFIG{ "auto_disarm_delay", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 60 }, PG_ARMING_CONFIG, offsetof(armingConfig_t, auto_disarm_delay) },{ PARAM_NAME_GYRO_CAL_ON_FIRST_ARM, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_ARMING_CONFIG, offsetof(armingConfig_t, gyro_cal_on_first_arm) },// PG_GPS_CONFIG
#ifdef USE_GPS{ PARAM_NAME_GPS_PROVIDER, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GPS_PROVIDER }, PG_GPS_CONFIG, offsetof(gpsConfig_t, provider) },{ PARAM_NAME_GPS_SBAS_MODE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GPS_SBAS_MODE }, PG_GPS_CONFIG, offsetof(gpsConfig_t, sbasMode) },{ PARAM_NAME_GPS_AUTO_CONFIG, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_CONFIG, offsetof(gpsConfig_t, autoConfig) },{ PARAM_NAME_GPS_AUTO_BAUD, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_CONFIG, offsetof(gpsConfig_t, autoBaud) },{ PARAM_NAME_GPS_UBLOX_ACQUIRE_MODEL, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GPS_UBLOX_MODELS }, PG_GPS_CONFIG, offsetof(gpsConfig_t, gps_ublox_acquire_model) },{ PARAM_NAME_GPS_UBLOX_FLIGHT_MODEL, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GPS_UBLOX_MODELS }, PG_GPS_CONFIG, offsetof(gpsConfig_t, gps_ublox_flight_model) },{ PARAM_NAME_GPS_UBLOX_USE_GALILEO, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_CONFIG, offsetof(gpsConfig_t, gps_ublox_use_galileo) },{ PARAM_NAME_GPS_UBLOX_FULL_POWER, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_CONFIG, offsetof(gpsConfig_t, gps_ublox_full_power) },{ PARAM_NAME_GPS_SET_HOME_POINT_ONCE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_CONFIG, offsetof(gpsConfig_t, gps_set_home_point_once) },{ PARAM_NAME_GPS_USE_3D_SPEED, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_CONFIG, offsetof(gpsConfig_t, gps_use_3d_speed) },{ PARAM_NAME_GPS_SBAS_INTEGRITY, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_CONFIG, offsetof(gpsConfig_t, sbas_integrity) },#ifdef USE_GPS_RESCUE// PG_GPS_RESCUE{ PARAM_NAME_GPS_RESCUE_MIN_START_DIST, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 20, 1000 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, minRescueDth) },{ PARAM_NAME_GPS_RESCUE_ALT_MODE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GPS_RESCUE_ALT_MODE }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, altitudeMode) },{ PARAM_NAME_GPS_RESCUE_INITIAL_CLIMB, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, rescueAltitudeBufferM) },{ PARAM_NAME_GPS_RESCUE_ASCEND_RATE, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 50, 2500 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, ascendRate) },{ PARAM_NAME_GPS_RESCUE_RETURN_ALT, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 2, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, initialAltitudeM) },{ PARAM_NAME_GPS_RESCUE_RETURN_SPEED, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 3000 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, rescueGroundspeed) },{ PARAM_NAME_GPS_RESCUE_MAX_RESCUE_ANGLE, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 80 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, maxRescueAngle) },{ PARAM_NAME_GPS_RESCUE_ROLL_MIX, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 250 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, rollMix) },{ PARAM_NAME_GPS_RESCUE_PITCH_CUTOFF, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 10, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, pitchCutoffHz) },{ PARAM_NAME_GPS_RESCUE_DESCENT_DIST, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 5, 500 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, descentDistanceM) },{ PARAM_NAME_GPS_RESCUE_DESCEND_RATE, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 25, 500 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, descendRate) },{ PARAM_NAME_GPS_RESCUE_LANDING_ALT, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 15 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, targetLandingAltitudeM) },{ PARAM_NAME_GPS_RESCUE_DISARM_THRESHOLD, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 250 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, disarmThreshold) },{ PARAM_NAME_GPS_RESCUE_THROTTLE_MIN, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 1000, 2000 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, throttleMin) },{ PARAM_NAME_GPS_RESCUE_THROTTLE_MAX, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 1000, 2000 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, throttleMax) },{ PARAM_NAME_GPS_RESCUE_THROTTLE_HOVER, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 1000, 2000 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, throttleHover) },{ PARAM_NAME_GPS_RESCUE_SANITY_CHECKS, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_GPS_RESCUE_SANITY_CHECK }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, sanityChecks) },{ PARAM_NAME_GPS_RESCUE_MIN_SATS, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 5, 50 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, minSats) },{ PARAM_NAME_GPS_RESCUE_ALLOW_ARMING_WITHOUT_FIX, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, allowArmingWithoutFix) },{ PARAM_NAME_GPS_RESCUE_THROTTLE_P, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, throttleP) },{ PARAM_NAME_GPS_RESCUE_THROTTLE_I, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, throttleI) },{ PARAM_NAME_GPS_RESCUE_THROTTLE_D, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, throttleD) },{ PARAM_NAME_GPS_RESCUE_VELOCITY_P, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, velP) },{ PARAM_NAME_GPS_RESCUE_VELOCITY_I, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, velI) },{ PARAM_NAME_GPS_RESCUE_VELOCITY_D, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, velD) },{ PARAM_NAME_GPS_RESCUE_YAW_P, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, yawP) },#ifdef USE_MAG{ PARAM_NAME_GPS_RESCUE_USE_MAG, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GPS_RESCUE, offsetof(gpsRescueConfig_t, useMag) },
#endif // USE_MAG
#endif // USE_GPS_RESCUE
#endif // USE_GPS{ PARAM_NAME_DEADBAND, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 32 }, PG_RC_CONTROLS_CONFIG, offsetof(rcControlsConfig_t, deadband) },{ PARAM_NAME_YAW_DEADBAND, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_RC_CONTROLS_CONFIG, offsetof(rcControlsConfig_t, yaw_deadband) },{ "yaw_control_reversed", VAR_INT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RC_CONTROLS_CONFIG, offsetof(rcControlsConfig_t, yaw_control_reversed) },// PG_PID_CONFIG{ PARAM_NAME_PID_PROCESS_DENOM, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, MAX_PID_PROCESS_DENOM }, PG_PID_CONFIG, offsetof(pidConfig_t, pid_process_denom) },
#ifdef USE_RUNAWAY_TAKEOFF{ "runaway_takeoff_prevention", VAR_UINT8 | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PID_CONFIG, offsetof(pidConfig_t, runaway_takeoff_prevention) }, // enables/disables runaway takeoff prevention{ "runaway_takeoff_deactivate_delay", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 100, 1000 }, PG_PID_CONFIG, offsetof(pidConfig_t, runaway_takeoff_deactivate_delay) }, // deactivate time in ms{ "runaway_takeoff_deactivate_throttle_percent", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_PID_CONFIG, offsetof(pidConfig_t, runaway_takeoff_deactivate_throttle) }, // minimum throttle percentage during deactivation phase
#endif// PG_PID_PROFILE
#ifdef USE_PROFILE_NAMES{ "profile_name", VAR_UINT8 | PROFILE_VALUE | MODE_STRING, .config.string = { 1, MAX_PROFILE_NAME_LENGTH, STRING_FLAGS_NONE }, PG_PID_PROFILE, offsetof(pidProfile_t, profileName) },
#endif
#ifdef USE_DYN_LPF{ "dterm_lpf1_dyn_min_hz", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, DYN_LPF_MAX_HZ }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_lpf1_dyn_min_hz) },{ "dterm_lpf1_dyn_max_hz", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, DYN_LPF_MAX_HZ }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_lpf1_dyn_max_hz) },{ "dterm_lpf1_dyn_expo", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 10 }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_lpf1_dyn_expo) },
#endif{ PARAM_NAME_DTERM_LPF1_TYPE, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_DTERM_LPF_TYPE }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_lpf1_type) },{ PARAM_NAME_DTERM_LPF1_STATIC_HZ, VAR_INT16 | PROFILE_VALUE, .config.minmax = { 0, LPF_MAX_HZ }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_lpf1_static_hz) },{ PARAM_NAME_DTERM_LPF2_TYPE, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_DTERM_LPF_TYPE }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_lpf2_type) },{ PARAM_NAME_DTERM_LPF2_STATIC_HZ, VAR_INT16 | PROFILE_VALUE, .config.minmax = { 0, LPF_MAX_HZ }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_lpf2_static_hz) },{ PARAM_NAME_DTERM_NOTCH_HZ, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, LPF_MAX_HZ }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_notch_hz) },{ PARAM_NAME_DTERM_NOTCH_CUTOFF, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, LPF_MAX_HZ }, PG_PID_PROFILE, offsetof(pidProfile_t, dterm_notch_cutoff) },
#if defined(USE_BATTERY_VOLTAGE_SAG_COMPENSATION){ PARAM_NAME_VBAT_SAG_COMPENSATION, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 150 }, PG_PID_PROFILE, offsetof(pidProfile_t, vbat_sag_compensation) },
#endif{ PARAM_NAME_PID_AT_MIN_THROTTLE, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PID_PROFILE, offsetof(pidProfile_t, pidAtMinThrottle) },{ PARAM_NAME_ANTI_GRAVITY_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { ITERM_ACCELERATOR_GAIN_OFF, ITERM_ACCELERATOR_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, anti_gravity_gain) },{ PARAM_NAME_ANTI_GRAVITY_CUTOFF_HZ, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 2, 50 }, PG_PID_PROFILE, offsetof(pidProfile_t, anti_gravity_cutoff_hz) },{ PARAM_NAME_ANTI_GRAVITY_P_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 250 }, PG_PID_PROFILE, offsetof(pidProfile_t, anti_gravity_p_gain) },{ PARAM_NAME_ACC_LIMIT_YAW, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 500 }, PG_PID_PROFILE, offsetof(pidProfile_t, yawRateAccelLimit) },{ PARAM_NAME_ACC_LIMIT, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 500 }, PG_PID_PROFILE, offsetof(pidProfile_t, rateAccelLimit) },{ "crash_dthreshold", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 2000 }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_dthreshold) },{ "crash_gthreshold", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 100, 2000 }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_gthreshold) },{ "crash_setpoint_threshold", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 50, 2000 }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_setpoint_threshold) },{ "crash_time", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 100, 5000 }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_time) },{ "crash_delay", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 500 }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_delay) },{ "crash_recovery_angle", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 5, 30 }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_recovery_angle) },{ "crash_recovery_rate", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 50, 255 }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_recovery_rate) },{ "crash_limit_yaw", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 1000 }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_limit_yaw) },{ "crash_recovery", VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_CRASH_RECOVERY }, PG_PID_PROFILE, offsetof(pidProfile_t, crash_recovery) },{ "iterm_rotation", VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PID_PROFILE, offsetof(pidProfile_t, iterm_rotation) },
#if defined(USE_ITERM_RELAX){ PARAM_NAME_ITERM_RELAX, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_ITERM_RELAX }, PG_PID_PROFILE, offsetof(pidProfile_t, iterm_relax) },{ PARAM_NAME_ITERM_RELAX_TYPE, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_ITERM_RELAX_TYPE }, PG_PID_PROFILE, offsetof(pidProfile_t, iterm_relax_type) },{ PARAM_NAME_ITERM_RELAX_CUTOFF, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 1, 50 }, PG_PID_PROFILE, offsetof(pidProfile_t, iterm_relax_cutoff) },
#endif{ PARAM_NAME_ITERM_WINDUP, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 30, 100 }, PG_PID_PROFILE, offsetof(pidProfile_t, itermWindupPointPercent) },{ "iterm_limit", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 500 }, PG_PID_PROFILE, offsetof(pidProfile_t, itermLimit) },{ PARAM_NAME_PIDSUM_LIMIT, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { PIDSUM_LIMIT_MIN, PIDSUM_LIMIT_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pidSumLimit) },{ PARAM_NAME_PIDSUM_LIMIT_YAW, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { PIDSUM_LIMIT_MIN, PIDSUM_LIMIT_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pidSumLimitYaw) },{ PARAM_NAME_YAW_LOWPASS_HZ, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 500 }, PG_PID_PROFILE, offsetof(pidProfile_t, yaw_lowpass_hz) },#if defined(USE_THROTTLE_BOOST){ PARAM_NAME_THROTTLE_BOOST, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_PID_PROFILE, offsetof(pidProfile_t, throttle_boost) },{ PARAM_NAME_THROTTLE_BOOST_CUTOFF, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 5, 50 }, PG_PID_PROFILE, offsetof(pidProfile_t, throttle_boost_cutoff) },
#endif#ifdef USE_ACRO_TRAINER{ "acro_trainer_angle_limit", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 80 }, PG_PID_PROFILE, offsetof(pidProfile_t, acro_trainer_angle_limit) },{ "acro_trainer_lookahead_ms", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 200 }, PG_PID_PROFILE, offsetof(pidProfile_t, acro_trainer_lookahead_ms) },{ "acro_trainer_debug_axis", VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_ACRO_TRAINER_DEBUG }, PG_PID_PROFILE, offsetof(pidProfile_t, acro_trainer_debug_axis) },{ "acro_trainer_gain", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 25, 255 }, PG_PID_PROFILE, offsetof(pidProfile_t, acro_trainer_gain) },
#endif // USE_ACRO_TRAINER{ "p_pitch", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_PITCH].P) },{ "i_pitch", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_PITCH].I) },{ "d_pitch", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_PITCH].D) },{ "f_pitch", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, F_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_PITCH].F) },{ "p_roll", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_ROLL].P) },{ "i_roll", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_ROLL].I) },{ "d_roll", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_ROLL].D) },{ "f_roll", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, F_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_ROLL].F) },{ "p_yaw", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_YAW].P) },{ "i_yaw", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_YAW].I) },{ "d_yaw", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, PID_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_YAW].D) },{ "f_yaw", VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, F_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_YAW].F) },{ PARAM_NAME_ANGLE_P_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 200 }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_LEVEL].P) },{ PARAM_NAME_ANGLE_FEEDFORWARD, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 200 }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_LEVEL].F) },{ PARAM_NAME_ANGLE_FF_SMOOTHING_MS, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 250 }, PG_PID_PROFILE, offsetof(pidProfile_t, angle_feedforward_smoothing_ms) },{ PARAM_NAME_ANGLE_LIMIT, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 85 }, PG_PID_PROFILE, offsetof(pidProfile_t, angle_limit) },{ PARAM_NAME_ANGLE_EARTH_REF, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_PID_PROFILE, offsetof(pidProfile_t, angle_earth_ref) },{ PARAM_NAME_HORIZON_LEVEL_STRENGTH, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_LEVEL].I) },{ PARAM_NAME_HORIZON_LIMIT_STICKS, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 200 }, PG_PID_PROFILE, offsetof(pidProfile_t, pid[PID_LEVEL].D) },{ PARAM_NAME_HORIZON_LIMIT_DEGREES, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 250 }, PG_PID_PROFILE, offsetof(pidProfile_t, horizon_limit_degrees) },{ PARAM_NAME_HORIZON_IGNORE_STICKS, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PID_PROFILE, offsetof(pidProfile_t, horizon_ignore_sticks) },{ PARAM_NAME_HORIZON_DELAY_MS, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 5000 }, PG_PID_PROFILE, offsetof(pidProfile_t, horizon_delay_ms) }, #if defined(USE_ABSOLUTE_CONTROL){ PARAM_NAME_ABS_CONTROL_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 20 }, PG_PID_PROFILE, offsetof(pidProfile_t, abs_control_gain) },{ "abs_control_limit", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 255 }, PG_PID_PROFILE, offsetof(pidProfile_t, abs_control_limit) },{ "abs_control_error_limit", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 1, 45 }, PG_PID_PROFILE, offsetof(pidProfile_t, abs_control_error_limit) },{ "abs_control_cutoff", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 1, 45 }, PG_PID_PROFILE, offsetof(pidProfile_t, abs_control_cutoff) },
#endif#ifdef USE_INTEGRATED_YAW_CONTROL{ PARAM_NAME_USE_INTEGRATED_YAW, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PID_PROFILE, offsetof(pidProfile_t, use_integrated_yaw) },{ "integrated_yaw_relax", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_PID_PROFILE, offsetof(pidProfile_t, integrated_yaw_relax) },
#endif#ifdef USE_D_MIN{ "d_min_roll", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, D_MIN_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, d_min[FD_ROLL]) },{ "d_min_pitch", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, D_MIN_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, d_min[FD_PITCH]) },{ "d_min_yaw", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, D_MIN_GAIN_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, d_min[FD_YAW]) },{ PARAM_NAME_D_MAX_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_PID_PROFILE, offsetof(pidProfile_t, d_min_gain) },{ PARAM_NAME_D_MAX_ADVANCE, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 200 }, PG_PID_PROFILE, offsetof(pidProfile_t, d_min_advance) },
#endif{ PARAM_NAME_MOTOR_OUTPUT_LIMIT, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { MOTOR_OUTPUT_LIMIT_PERCENT_MIN, MOTOR_OUTPUT_LIMIT_PERCENT_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, motor_output_limit) },{ "auto_profile_cell_count", VAR_INT8 | PROFILE_VALUE, .config.minmax = { AUTO_PROFILE_CELL_COUNT_CHANGE, MAX_AUTO_DETECT_CELL_COUNT }, PG_PID_PROFILE, offsetof(pidProfile_t, auto_profile_cell_count) },#ifdef USE_LAUNCH_CONTROL{ "launch_control_mode", VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_LAUNCH_CONTROL_MODE }, PG_PID_PROFILE, offsetof(pidProfile_t, launchControlMode) },{ "launch_trigger_allow_reset", VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PID_PROFILE, offsetof(pidProfile_t, launchControlAllowTriggerReset) },{ "launch_trigger_throttle_percent", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, LAUNCH_CONTROL_THROTTLE_TRIGGER_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, launchControlThrottlePercent) },{ "launch_angle_limit", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 80 }, PG_PID_PROFILE, offsetof(pidProfile_t, launchControlAngleLimit) },{ "launch_control_gain", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 200 }, PG_PID_PROFILE, offsetof(pidProfile_t, launchControlGain) },
#endif#ifdef USE_THRUST_LINEARIZATION{ "thrust_linear", VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 150 }, PG_PID_PROFILE, offsetof(pidProfile_t, thrustLinearization) },
#endif#ifdef USE_AIRMODE_LPF{ "transient_throttle_limit", VAR_UINT8 | PROFILE_VALUE, .config.minmax = { 0, 30 }, PG_PID_PROFILE, offsetof(pidProfile_t, transient_throttle_limit) },
#endif#ifdef USE_FEEDFORWARD{ PARAM_NAME_FEEDFORWARD_TRANSITION, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_PID_PROFILE, offsetof(pidProfile_t, feedforward_transition) },{ PARAM_NAME_FEEDFORWARD_AVERAGING, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_FEEDFORWARD_AVERAGING }, PG_PID_PROFILE, offsetof(pidProfile_t, feedforward_averaging) },{ PARAM_NAME_FEEDFORWARD_SMOOTH_FACTOR, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = {0, 95}, PG_PID_PROFILE, offsetof(pidProfile_t, feedforward_smooth_factor) },{ PARAM_NAME_FEEDFORWARD_JITTER_FACTOR, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = {0, 20}, PG_PID_PROFILE, offsetof(pidProfile_t, feedforward_jitter_factor) },{ PARAM_NAME_FEEDFORWARD_BOOST, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 50 }, PG_PID_PROFILE, offsetof(pidProfile_t, feedforward_boost) },{ PARAM_NAME_FEEDFORWARD_MAX_RATE_LIMIT, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = {0, 200}, PG_PID_PROFILE, offsetof(pidProfile_t, feedforward_max_rate_limit) },
#endif#ifdef USE_DYN_IDLE{ PARAM_NAME_DYN_IDLE_MIN_RPM, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 200 }, PG_PID_PROFILE, offsetof(pidProfile_t, dyn_idle_min_rpm) },{ PARAM_NAME_DYN_IDLE_P_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 1, 250 }, PG_PID_PROFILE, offsetof(pidProfile_t, dyn_idle_p_gain) },{ PARAM_NAME_DYN_IDLE_I_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 1, 250 }, PG_PID_PROFILE, offsetof(pidProfile_t, dyn_idle_i_gain) },{ PARAM_NAME_DYN_IDLE_D_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, 250 }, PG_PID_PROFILE, offsetof(pidProfile_t, dyn_idle_d_gain) },{ PARAM_NAME_DYN_IDLE_MAX_INCREASE, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 255 }, PG_PID_PROFILE, offsetof(pidProfile_t, dyn_idle_max_increase) },{ PARAM_NAME_DYN_IDLE_START_INCREASE, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 10, 255 }, PG_PID_PROFILE, offsetof(pidProfile_t, dyn_idle_start_increase) },
#endif{ "level_race_mode", VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PID_PROFILE, offsetof(pidProfile_t, level_race_mode) },#ifdef USE_SIMPLIFIED_TUNING{ PARAM_NAME_SIMPLIFIED_PIDS_MODE, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_SIMPLIFIED_TUNING_PIDS_MODE }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_pids_mode) },{ PARAM_NAME_SIMPLIFIED_MASTER_MULTIPLIER, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { SIMPLIFIED_TUNING_PIDS_MIN, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_master_multiplier) },{ PARAM_NAME_SIMPLIFIED_I_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { SIMPLIFIED_TUNING_PIDS_MIN, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_i_gain) },{ PARAM_NAME_SIMPLIFIED_D_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { SIMPLIFIED_TUNING_PIDS_MIN, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_d_gain) },{ PARAM_NAME_SIMPLIFIED_PI_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { SIMPLIFIED_TUNING_PIDS_MIN, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_pi_gain) },{ PARAM_NAME_SIMPLIFIED_DMAX_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_dmin_ratio) },{ PARAM_NAME_SIMPLIFIED_FEEDFORWARD_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_feedforward_gain) },{ PARAM_NAME_SIMPLIFIED_PITCH_D_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { SIMPLIFIED_TUNING_PIDS_MIN, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_roll_pitch_ratio) },{ PARAM_NAME_SIMPLIFIED_PITCH_PI_GAIN, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { SIMPLIFIED_TUNING_PIDS_MIN, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_pitch_pi_gain) },{ PARAM_NAME_SIMPLIFIED_DTERM_FILTER, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_dterm_filter) },{ PARAM_NAME_SIMPLIFIED_DTERM_FILTER_MULTIPLIER, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { SIMPLIFIED_TUNING_FILTERS_MIN, SIMPLIFIED_TUNING_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, simplified_dterm_filter_multiplier) },{ PARAM_NAME_SIMPLIFIED_GYRO_FILTER, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, simplified_gyro_filter) },{ PARAM_NAME_SIMPLIFIED_GYRO_FILTER_MULTIPLIER, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { SIMPLIFIED_TUNING_FILTERS_MIN, SIMPLIFIED_TUNING_MAX }, PG_GYRO_CONFIG, offsetof(gyroConfig_t, simplified_gyro_filter_multiplier) },
#endif
#ifdef USE_TPA_MODE{ PARAM_NAME_TPA_MODE, VAR_UINT8 | PROFILE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_TPA_MODE }, PG_PID_PROFILE, offsetof(pidProfile_t, tpa_mode) },
#endif{ PARAM_NAME_TPA_RATE, VAR_UINT8 | PROFILE_VALUE, .config.minmaxUnsigned = { 0, TPA_MAX}, PG_PID_PROFILE, offsetof(pidProfile_t, tpa_rate) },{ PARAM_NAME_TPA_BREAKPOINT, VAR_UINT16 | PROFILE_VALUE, .config.minmaxUnsigned = { PWM_PULSE_MIN, PWM_PULSE_MAX }, PG_PID_PROFILE, offsetof(pidProfile_t, tpa_breakpoint) },// PG_TELEMETRY_CONFIG
#ifdef USE_TELEMETRY{ "tlm_inverted", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, telemetry_inverted) },{ "tlm_halfduplex", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, halfDuplex) },
#if defined(USE_TELEMETRY_FRSKY_HUB)
#if defined(USE_GPS){ "frsky_default_lat", VAR_INT16 | MASTER_VALUE, .config.minmax = { -9000, 9000 }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, gpsNoFixLatitude) },{ "frsky_default_long", VAR_INT16 | MASTER_VALUE, .config.minmax = { -18000, 18000 }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, gpsNoFixLongitude) },{ "frsky_gps_format", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, FRSKY_FORMAT_NMEA }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, frsky_coordinate_format) },{ "frsky_unit", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_UNIT }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, frsky_unit) },
#endif{ "frsky_vfas_precision", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { FRSKY_VFAS_PRECISION_LOW, FRSKY_VFAS_PRECISION_HIGH }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, frsky_vfas_precision) },
#endif // USE_TELEMETRY_FRSKY_HUB{ "hott_alarm_int", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 120 }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, hottAlarmSoundInterval) },{ "pid_in_tlm", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, pidValuesAsTelemetry) },{ "report_cell_voltage", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, report_cell_voltage) },
#if defined(USE_TELEMETRY_IBUS){ "ibus_sensor", VAR_UINT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = IBUS_SENSOR_COUNT, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, flysky_sensors)},
#endif
#ifdef USE_TELEMETRY_MAVLINK// Support for misusing the heading field in MAVlink to indicate mAh drawn for Connex Prosight OSD// Set to 10 to show a tenth of your capacity drawn.// Set to $size_of_battery to get a percentage of battery used.{ "mavlink_mah_as_heading_divisor", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 30000 }, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, mavlink_mah_as_heading_divisor) },
#endif
#ifdef USE_TELEMETRY_SENSORS_DISABLED_DETAILS{ "telemetry_disabled_voltage", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_VOLTAGE), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_current", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_CURRENT), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_fuel", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_FUEL), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_mode", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_MODE), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_acc_x", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_ACC_X), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_acc_y", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_ACC_Y), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_acc_z", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_ACC_Z), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_pitch", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_PITCH), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_roll", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_ROLL), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_heading", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_HEADING), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_altitude", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_ALTITUDE), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_vario", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_VARIO), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_lat_long", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_LAT_LONG), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_ground_speed", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_GROUND_SPEED), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_distance", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_DISTANCE), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_esc_current", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(ESC_SENSOR_CURRENT), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_esc_voltage", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(ESC_SENSOR_VOLTAGE), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_esc_rpm", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(ESC_SENSOR_RPM), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_esc_temperature", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(ESC_SENSOR_TEMPERATURE), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_temperature", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_TEMPERATURE), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},{ "telemetry_disabled_cap_used", VAR_UINT32 | MASTER_VALUE | MODE_BITSET, .config.bitpos = LOG2(SENSOR_CAP_USED), PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},
#else{ "telemetry_disabled_sensors", VAR_UINT32 | MASTER_VALUE, .config.u32Max = SENSOR_ALL, PG_TELEMETRY_CONFIG, offsetof(telemetryConfig_t, disabledSensors)},
#endif
#endif // USE_TELEMETRY// PG_LED_STRIP_CONFIG
#ifdef USE_LED_STRIP{ "ledstrip_visual_beeper", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_visual_beeper) },{ "ledstrip_visual_beeper_color",VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_LEDSTRIP_COLOR }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_visual_beeper_color) },{ "ledstrip_grb_rgb", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_RGB_GRB }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_grb_rgb) },{ "ledstrip_profile", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_LED_PROFILE }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_profile) },{ "ledstrip_race_color", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_LEDSTRIP_COLOR }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_race_color) },{ "ledstrip_beacon_color", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_LEDSTRIP_COLOR }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_beacon_color) },{ "ledstrip_beacon_period_ms", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 50, 10000 }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_beacon_period_ms) },{ "ledstrip_beacon_percent", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_beacon_percent) },{ "ledstrip_beacon_armed_only", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_beacon_armed_only) },{ "ledstrip_brightness", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 5, 100 }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_brightness) },{ "ledstrip_rainbow_delta", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, HSV_HUE_MAX }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_rainbow_delta) },{ "ledstrip_rainbow_freq", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 200 }, PG_LED_STRIP_CONFIG, offsetof(ledStripConfig_t, ledstrip_rainbow_freq) },
#endif// PG_SDCARD_CONFIG
#ifdef USE_SDCARD{ "sdcard_detect_inverted", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_SDCARD_CONFIG, offsetof(sdcardConfig_t, cardDetectInverted) },{ "sdcard_mode", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_SDCARD_MODE }, PG_SDCARD_CONFIG, offsetof(sdcardConfig_t, mode) },
#endif
#ifdef USE_SDCARD_SPI{ "sdcard_spi_bus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, SPIDEV_COUNT }, PG_SDCARD_CONFIG, offsetof(sdcardConfig_t, device) },
#endif
#ifdef USE_SDCARD_SDIO{ "sdio_clk_bypass", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_SDIO_CONFIG, offsetof(sdioConfig_t, clockBypass) },{ "sdio_use_cache", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_SDIO_CONFIG, offsetof(sdioConfig_t, useCache) },{ "sdio_use_4bit_width", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_SDIO_CONFIG, offsetof(sdioConfig_t, use4BitWidth) },
#ifdef STM32H7{ "sdio_device", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, SDIODEV_COUNT }, PG_SDIO_CONFIG, offsetof(sdioConfig_t, device) },
#endif
#endif// PG_OSD_CONFIG
#ifdef USE_OSD{ "osd_units", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_UNIT }, PG_OSD_CONFIG, offsetof(osdConfig_t, units) },// Enabled OSD warning flags are stored as bitmapped values inside a 32bit parameter{ "osd_warn_bitmask", VAR_UINT32 | MASTER_VALUE, .config.u32Max = UINT32_MAX, PG_OSD_CONFIG, offsetof(osdConfig_t, enabledWarnings)},{ "osd_rssi_alarm", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_OSD_CONFIG, offsetof(osdConfig_t, rssi_alarm) },
#ifdef USE_RX_LINK_QUALITY_INFO{ "osd_link_quality_alarm", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_OSD_CONFIG, offsetof(osdConfig_t, link_quality_alarm) },
#endif
#ifdef USE_RX_RSSI_DBM{ "osd_rssi_dbm_alarm", VAR_INT16 | MASTER_VALUE, .config.minmax = { CRSF_RSSI_MIN, CRSF_RSSI_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, rssi_dbm_alarm) },
#endif
#ifdef USE_RX_RSNR{ "osd_rsnr_alarm", VAR_INT16 | MASTER_VALUE, .config.minmax = { CRSF_SNR_MIN, CRSF_SNR_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, rsnr_alarm) },
#endif{ "osd_cap_alarm", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 20000 }, PG_OSD_CONFIG, offsetof(osdConfig_t, cap_alarm) },{ "osd_alt_alarm", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 10000 }, PG_OSD_CONFIG, offsetof(osdConfig_t, alt_alarm) },{ "osd_distance_alarm", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT16_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, distance_alarm) },{ "osd_esc_temp_alarm", VAR_UINT8 | MASTER_VALUE, .config.minmax = { 0, UINT8_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, esc_temp_alarm) },{ "osd_esc_rpm_alarm", VAR_INT16 | MASTER_VALUE, .config.minmax = { ESC_RPM_ALARM_OFF, INT16_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, esc_rpm_alarm) },{ "osd_esc_current_alarm", VAR_INT16 | MASTER_VALUE, .config.minmax = { ESC_CURRENT_ALARM_OFF, INT16_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, esc_current_alarm) },
#ifdef USE_ADC_INTERNAL{ "osd_core_temp_alarm", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, core_temp_alarm) },
#endif{ "osd_ah_max_pit", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 90 }, PG_OSD_CONFIG, offsetof(osdConfig_t, ahMaxPitch) },{ "osd_ah_max_rol", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 90 }, PG_OSD_CONFIG, offsetof(osdConfig_t, ahMaxRoll) },{ "osd_ah_invert", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_OSD_CONFIG, offsetof(osdConfig_t, ahInvert) },{ "osd_logo_on_arming", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OSD_LOGO_ON_ARMING }, PG_OSD_CONFIG, offsetof(osdConfig_t, logo_on_arming) },{ "osd_logo_on_arming_duration",VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 5, 50 }, PG_OSD_CONFIG, offsetof(osdConfig_t, logo_on_arming_duration) },{ "osd_tim1", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, INT16_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, timers[OSD_TIMER_1]) },{ "osd_tim2", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, INT16_MAX }, PG_OSD_CONFIG, offsetof(osdConfig_t, timers[OSD_TIMER_2]) },{ "osd_vbat_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_MAIN_BATT_VOLTAGE]) },{ "osd_rssi_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_RSSI_VALUE]) },
#ifdef USE_RX_LINK_QUALITY_INFO{ "osd_link_quality_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_LINK_QUALITY]) },
#endif
#ifdef USE_RX_LINK_UPLINK_POWER{ "osd_link_tx_power_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_TX_UPLINK_POWER]) },
#endif
#ifdef USE_RX_RSSI_DBM{ "osd_rssi_dbm_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_RSSI_DBM_VALUE]) },
#endif
#ifdef USE_RX_RSNR{ "osd_rsnr_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_RSNR_VALUE]) },
#endif{ "osd_tim_1_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ITEM_TIMER_1]) },{ "osd_tim_2_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ITEM_TIMER_2]) },{ "osd_remaining_time_estimate_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_REMAINING_TIME_ESTIMATE]) },{ "osd_flymode_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_FLYMODE]) },{ "osd_anti_gravity_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ANTI_GRAVITY]) },{ "osd_g_force_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_G_FORCE]) },{ "osd_throttle_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_THROTTLE_POS]) },{ "osd_vtx_channel_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_VTX_CHANNEL]) },{ "osd_crosshairs_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_CROSSHAIRS]) },{ "osd_ah_sbar_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_HORIZON_SIDEBARS]) },{ "osd_ah_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ARTIFICIAL_HORIZON]) },{ "osd_current_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_CURRENT_DRAW]) },{ "osd_mah_drawn_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_MAH_DRAWN]) },{ "osd_wh_drawn_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_WATT_HOURS_DRAWN]) },{ "osd_motor_diag_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_MOTOR_DIAG]) },{ "osd_craft_name_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_CRAFT_NAME]) },{ "osd_pilot_name_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_PILOT_NAME]) },{ "osd_gps_speed_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_GPS_SPEED]) },{ "osd_gps_lon_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_GPS_LON]) },{ "osd_gps_lat_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_GPS_LAT]) },{ "osd_gps_sats_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_GPS_SATS]) },{ "osd_home_dir_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_HOME_DIR]) },{ "osd_home_dist_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_HOME_DIST]) },{ "osd_flight_dist_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_FLIGHT_DIST]) },{ "osd_compass_bar_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_COMPASS_BAR]) },{ "osd_altitude_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ALTITUDE]) },{ "osd_pid_roll_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ROLL_PIDS]) },{ "osd_pid_pitch_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_PITCH_PIDS]) },{ "osd_pid_yaw_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_YAW_PIDS]) },{ "osd_debug_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_DEBUG]) },{ "osd_power_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_POWER]) },{ "osd_pidrate_profile_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_PIDRATE_PROFILE]) },{ "osd_warnings_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_WARNINGS]) },{ "osd_avg_cell_voltage_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_AVG_CELL_VOLTAGE]) },{ "osd_pit_ang_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_PITCH_ANGLE]) },{ "osd_rol_ang_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ROLL_ANGLE]) },{ "osd_battery_usage_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_MAIN_BATT_USAGE]) },{ "osd_disarmed_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_DISARMED]) },{ "osd_nheading_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_NUMERICAL_HEADING]) },{ "osd_up_down_reference_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_UP_DOWN_REFERENCE]) },{ "osd_ready_mode_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_READY_MODE]) },
#ifdef USE_VARIO{ "osd_nvario_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_NUMERICAL_VARIO]) },
#endif{ "osd_esc_tmp_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ESC_TMP]) },{ "osd_esc_rpm_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ESC_RPM]) },{ "osd_esc_rpm_freq_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ESC_RPM_FREQ]) },{ "osd_rtc_date_time_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_RTC_DATETIME]) },{ "osd_adjustment_range_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_ADJUSTMENT_RANGE]) },{ "osd_flip_arrow_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_FLIP_ARROW]) },
#ifdef USE_ADC_INTERNAL{ "osd_core_temp_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_CORE_TEMPERATURE]) },
#endif
#ifdef USE_BLACKBOX{ "osd_log_status_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_LOG_STATUS]) },
#endif#ifdef USE_OSD_STICK_OVERLAY{ "osd_stick_overlay_left_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_STICK_OVERLAY_LEFT]) },{ "osd_stick_overlay_right_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_STICK_OVERLAY_RIGHT]) },{ "osd_stick_overlay_radio_mode", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 4 }, PG_OSD_CONFIG, offsetof(osdConfig_t, overlay_radio_mode) },
#endif#ifdef USE_PROFILE_NAMES{ "osd_rate_profile_name_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_RATE_PROFILE_NAME]) },{ "osd_pid_profile_name_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_PID_PROFILE_NAME]) },
#endif#ifdef USE_OSD_PROFILES{ "osd_profile_name_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_PROFILE_NAME]) },
#endif{ "osd_rcchannels_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_RC_CHANNELS]) },{ "osd_camera_frame_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_CAMERA_FRAME]) },{ "osd_efficiency_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_EFFICIENCY]) },{ "osd_total_flights_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_TOTAL_FLIGHTS]) },{ "osd_aux_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_AUX_VALUE]) },#ifdef USE_MSP_DISPLAYPORT{ "osd_sys_goggle_voltage_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_GOGGLE_VOLTAGE]) },{ "osd_sys_vtx_voltage_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_VTX_VOLTAGE]) },{ "osd_sys_bitrate_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_BITRATE]) },{ "osd_sys_delay_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_DELAY]) },{ "osd_sys_distance_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_DISTANCE]) },{ "osd_sys_lq_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_LQ]) },{ "osd_sys_goggle_dvr_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_GOGGLE_DVR]) },{ "osd_sys_vtx_dvr_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_VTX_DVR]) },{ "osd_sys_warnings_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_WARNINGS]) },{ "osd_sys_vtx_temp_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_VTX_TEMP]) },{ "osd_sys_fan_speed_pos", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, OSD_POSCFG_MAX }, PG_OSD_ELEMENT_CONFIG, offsetof(osdElementConfig_t, item_pos[OSD_SYS_FAN_SPEED]) },
#endif// OSD stats enabled flags are stored as bitmapped values inside a 32bit parameter{ "osd_stat_bitmask", VAR_UINT32 | MASTER_VALUE, .config.u32Max = UINT32_MAX, PG_OSD_CONFIG, offsetof(osdConfig_t, enabled_stats)},#ifdef USE_OSD_PROFILES{ "osd_profile", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, OSD_PROFILE_COUNT }, PG_OSD_CONFIG, offsetof(osdConfig_t, osdProfileIndex) },{ "osd_profile_1_name", VAR_UINT8 | MASTER_VALUE | MODE_STRING, .config.string = { 1, OSD_PROFILE_NAME_LENGTH, STRING_FLAGS_NONE }, PG_OSD_CONFIG, offsetof(osdConfig_t, profile[0]) },{ "osd_profile_2_name", VAR_UINT8 | MASTER_VALUE | MODE_STRING, .config.string = { 1, OSD_PROFILE_NAME_LENGTH, STRING_FLAGS_NONE }, PG_OSD_CONFIG, offsetof(osdConfig_t, profile[1]) },{ "osd_profile_3_name", VAR_UINT8 | MASTER_VALUE | MODE_STRING, .config.string = { 1, OSD_PROFILE_NAME_LENGTH, STRING_FLAGS_NONE }, PG_OSD_CONFIG, offsetof(osdConfig_t, profile[2]) },
#endif{ "osd_gps_sats_show_hdop", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_OSD_CONFIG, offsetof(osdConfig_t, gps_sats_show_hdop) },{ "osd_displayport_device", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OSD_DISPLAYPORT_DEVICE }, PG_OSD_CONFIG, offsetof(osdConfig_t, displayPortDevice) },{ "osd_rcchannels", VAR_INT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = OSD_RCCHANNELS_COUNT, PG_OSD_CONFIG, offsetof(osdConfig_t, rcChannels) },{ "osd_camera_frame_width", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { OSD_CAMERA_FRAME_MIN_WIDTH, OSD_CAMERA_FRAME_MAX_WIDTH }, PG_OSD_CONFIG, offsetof(osdConfig_t, camera_frame_width) },{ "osd_camera_frame_height", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { OSD_CAMERA_FRAME_MIN_HEIGHT, OSD_CAMERA_FRAME_MAX_HEIGHT }, PG_OSD_CONFIG, offsetof(osdConfig_t, camera_frame_height) },{ "osd_stat_avg_cell_value", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_OSD_CONFIG, offsetof(osdConfig_t, stat_show_cell_value) },{ "osd_framerate_hz", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { OSD_FRAMERATE_MIN_HZ, OSD_FRAMERATE_MAX_HZ }, PG_OSD_CONFIG, offsetof(osdConfig_t, framerate_hz) },{ "osd_menu_background", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_CMS_BACKGROUND }, PG_OSD_CONFIG, offsetof(osdConfig_t, cms_background_type) },{ "osd_aux_channel", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 1, MAX_SUPPORTED_RC_CHANNEL_COUNT }, PG_OSD_CONFIG, offsetof(osdConfig_t, aux_channel) },{ "osd_aux_scale", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 1, 1000 }, PG_OSD_CONFIG, offsetof(osdConfig_t, aux_scale) },{ "osd_aux_symbol", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 255 }, PG_OSD_CONFIG, offsetof(osdConfig_t, aux_symbol) },{ "osd_canvas_width", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 63 }, PG_OSD_CONFIG, offsetof(osdConfig_t, canvas_cols) },{ "osd_canvas_height", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 31 }, PG_OSD_CONFIG, offsetof(osdConfig_t, canvas_rows) },
#ifdef USE_CRAFTNAME_MSGS{ "osd_craftname_msgs", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_OSD_CONFIG, offsetof(osdConfig_t, osd_craftname_msgs) },
#endif //USE_CRAFTNAME_MSGS
#endif // end of #ifdef USE_OSD// PG_SYSTEM_CONFIG
#if defined(STM32F4) || defined(STM32G4){ "system_hse_mhz", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, 30 }, PG_SYSTEM_CONFIG, offsetof(systemConfig_t, hseMhz) },
#endif{ "task_statistics", VAR_INT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_SYSTEM_CONFIG, offsetof(systemConfig_t, task_statistics) },{ PARAM_NAME_DEBUG_MODE, VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_DEBUG }, PG_SYSTEM_CONFIG, offsetof(systemConfig_t, debug_mode) },{ "rate_6pos_switch", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_SYSTEM_CONFIG, offsetof(systemConfig_t, rateProfile6PosSwitch) },
#ifdef USE_OVERCLOCK{ "cpu_overclock", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OVERCLOCK }, PG_SYSTEM_CONFIG, offsetof(systemConfig_t, cpu_overclock) },
#endif{ "pwr_on_arm_grace", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 30 }, PG_SYSTEM_CONFIG, offsetof(systemConfig_t, powerOnArmingGraceTime) },{ "enable_stick_arming", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_SYSTEM_CONFIG, offsetof(systemConfig_t, enableStickArming) },// PG_VTX_CONFIG
#ifdef USE_VTX_COMMON{ "vtx_band", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, VTX_TABLE_MAX_BANDS }, PG_VTX_SETTINGS_CONFIG, offsetof(vtxSettingsConfig_t, band) },{ "vtx_channel", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, VTX_TABLE_MAX_CHANNELS }, PG_VTX_SETTINGS_CONFIG, offsetof(vtxSettingsConfig_t, channel) },{ "vtx_power", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, VTX_TABLE_MAX_POWER_LEVELS - 1 }, PG_VTX_SETTINGS_CONFIG, offsetof(vtxSettingsConfig_t, power) },{ "vtx_low_power_disarm", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_VTX_LOW_POWER_DISARM }, PG_VTX_SETTINGS_CONFIG, offsetof(vtxSettingsConfig_t, lowPowerDisarm) },{ "vtx_softserial_alt", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_VTX_SETTINGS_CONFIG, offsetof(vtxSettingsConfig_t, softserialAlt) },
#ifdef VTX_SETTINGS_FREQCMD{ "vtx_freq", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, VTX_SETTINGS_MAX_FREQUENCY_MHZ }, PG_VTX_SETTINGS_CONFIG, offsetof(vtxSettingsConfig_t, freq) },{ "vtx_pit_mode_freq", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, VTX_SETTINGS_MAX_FREQUENCY_MHZ }, PG_VTX_SETTINGS_CONFIG, offsetof(vtxSettingsConfig_t, pitModeFreq) },
#endif
#endif// PG_VTX_CONFIG
#if defined(USE_VTX_CONTROL) && defined(USE_VTX_COMMON){ "vtx_halfduplex", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_VTX_CONFIG, offsetof(vtxConfig_t, halfDuplex) },
#endif// PG_VTX_IO
#ifdef USE_VTX_RTC6705{ "vtx_spi_bus", VAR_UINT8 | HARDWARE_VALUE | MASTER_VALUE, .config.minmaxUnsigned = { 0, SPIDEV_COUNT }, PG_VTX_IO_CONFIG, offsetof(vtxIOConfig_t, spiDevice) },
#endif// PG_VCD_CONFIG
#if defined(USE_VIDEO_SYSTEM){ "vcd_video_system", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_VIDEO_SYSTEM }, PG_VCD_CONFIG, offsetof(vcdProfile_t, video_system) },
#endif
#if defined(USE_MAX7456){ "vcd_h_offset", VAR_INT8 | MASTER_VALUE, .config.minmax = { -32, 31 }, PG_VCD_CONFIG, offsetof(vcdProfile_t, h_offset) },{ "vcd_v_offset", VAR_INT8 | MASTER_VALUE, .config.minmax = { -15, 16 }, PG_VCD_CONFIG, offsetof(vcdProfile_t, v_offset) },
#endif// PG_MAX7456_CONFIG
#ifdef USE_MAX7456{ "max7456_clock", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_MAX7456_CLOCK }, PG_MAX7456_CONFIG, offsetof(max7456Config_t, clockConfig) },{ "max7456_spi_bus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, SPIDEV_COUNT }, PG_MAX7456_CONFIG, offsetof(max7456Config_t, spiDevice) },{ "max7456_preinit_opu", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MAX7456_CONFIG, offsetof(max7456Config_t, preInitOPU) },
#endif// PG_DISPLAY_PORT_MSP_CONFIG
#ifdef USE_MSP_DISPLAYPORT{ "displayport_msp_col_adjust", VAR_INT8 | MASTER_VALUE, .config.minmax = { -6, 0 }, PG_DISPLAY_PORT_MSP_CONFIG, offsetof(displayPortProfile_t, colAdjust) },{ "displayport_msp_row_adjust", VAR_INT8 | MASTER_VALUE, .config.minmax = { -3, 0 }, PG_DISPLAY_PORT_MSP_CONFIG, offsetof(displayPortProfile_t, rowAdjust) },{ "displayport_msp_fonts", VAR_UINT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = 4, PG_DISPLAY_PORT_MSP_CONFIG, offsetof(displayPortProfile_t, fontSelection) },{ "displayport_msp_use_device_blink", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_DISPLAY_PORT_MSP_CONFIG, offsetof(displayPortProfile_t, useDeviceBlink) },
#endif// PG_DISPLAY_PORT_MSP_CONFIG
#ifdef USE_MAX7456{ "displayport_max7456_col_adjust", VAR_INT8| MASTER_VALUE, .config.minmax = { -6, 0 }, PG_DISPLAY_PORT_MAX7456_CONFIG, offsetof(displayPortProfile_t, colAdjust) },{ "displayport_max7456_row_adjust", VAR_INT8| MASTER_VALUE, .config.minmax = { -3, 0 }, PG_DISPLAY_PORT_MAX7456_CONFIG, offsetof(displayPortProfile_t, rowAdjust) },{ "displayport_max7456_inv", VAR_UINT8| MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_DISPLAY_PORT_MAX7456_CONFIG, offsetof(displayPortProfile_t, invert) },{ "displayport_max7456_blk", VAR_UINT8| MASTER_VALUE, .config.minmaxUnsigned = { 0, 3 }, PG_DISPLAY_PORT_MAX7456_CONFIG, offsetof(displayPortProfile_t, blackBrightness) },{ "displayport_max7456_wht", VAR_UINT8| MASTER_VALUE, .config.minmaxUnsigned = { 0, 3 }, PG_DISPLAY_PORT_MAX7456_CONFIG, offsetof(displayPortProfile_t, whiteBrightness) },
#endif#ifdef USE_ESC_SENSOR{ "esc_sensor_halfduplex", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_ESC_SENSOR_CONFIG, offsetof(escSensorConfig_t, halfDuplex) },{ "esc_sensor_current_offset", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 16000 }, PG_ESC_SENSOR_CONFIG, offsetof(escSensorConfig_t, offset) },
#endif#ifdef USE_RX_FRSKY_SPI{ "frsky_spi_autobind", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CC2500_SPI_CONFIG, offsetof(rxCc2500SpiConfig_t, autoBind) },{ "frsky_spi_tx_id", VAR_UINT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = 3, PG_RX_CC2500_SPI_CONFIG, offsetof(rxCc2500SpiConfig_t, bindTxId) },{ "frsky_spi_offset", VAR_INT8 | MASTER_VALUE, .config.minmax = { -127, 127 }, PG_RX_CC2500_SPI_CONFIG, offsetof(rxCc2500SpiConfig_t, bindOffset) },{ "frsky_spi_bind_hop_data", VAR_UINT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = 50, PG_RX_CC2500_SPI_CONFIG, offsetof(rxCc2500SpiConfig_t, bindHopData) },{ "frsky_x_rx_num", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_RX_CC2500_SPI_CONFIG, offsetof(rxCc2500SpiConfig_t, rxNum) },{ "frsky_spi_a1_source", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_RX_FRSKY_SPI_A1_SOURCE }, PG_RX_CC2500_SPI_CONFIG, offsetof(rxCc2500SpiConfig_t, a1Source) },{ "cc2500_spi_chip_detect", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_RX_CC2500_SPI_CONFIG, offsetof(rxCc2500SpiConfig_t, chipDetectEnabled) },
#endif{ "led_inversion", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, ((1 << STATUS_LED_NUMBER) - 1) }, PG_STATUS_LED_CONFIG, offsetof(statusLedConfig_t, inversion) },
#ifdef USE_DASHBOARD{ "dashboard_i2c_bus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, I2CDEV_COUNT }, PG_DASHBOARD_CONFIG, offsetof(dashboardConfig_t, device) },{ "dashboard_i2c_addr", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { I2C_ADDR7_MIN, I2C_ADDR7_MAX }, PG_DASHBOARD_CONFIG, offsetof(dashboardConfig_t, address) },
#endif// PG_CAMERA_CONTROL_CONFIG
#ifdef USE_CAMERA_CONTROL{ "camera_control_mode", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_CAMERA_CONTROL_MODE }, PG_CAMERA_CONTROL_CONFIG, offsetof(cameraControlConfig_t, mode) },{ "camera_control_ref_voltage", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 200, 400 }, PG_CAMERA_CONTROL_CONFIG, offsetof(cameraControlConfig_t, refVoltage) },{ "camera_control_key_delay", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 100, 500 }, PG_CAMERA_CONTROL_CONFIG, offsetof(cameraControlConfig_t, keyDelayMs) },{ "camera_control_internal_resistance", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 10, 1000 }, PG_CAMERA_CONTROL_CONFIG, offsetof(cameraControlConfig_t, internalResistance) },{ "camera_control_button_resistance", VAR_UINT16 | MASTER_VALUE | MODE_ARRAY, .config.array.length = CAMERA_CONTROL_KEYS_COUNT, PG_CAMERA_CONTROL_CONFIG, offsetof(cameraControlConfig_t, buttonResistanceValues) },{ "camera_control_inverted", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_CAMERA_CONTROL_CONFIG, offsetof(cameraControlConfig_t, inverted) },
#endif// PG_RANGEFINDER_CONFIG
#ifdef USE_RANGEFINDER{ "rangefinder_hardware", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_RANGEFINDER_HARDWARE }, PG_RANGEFINDER_CONFIG, offsetof(rangefinderConfig_t, rangefinder_hardware) },
#endif// PG_PINIO_CONFIG
#ifdef USE_PINIO{ "pinio_config", VAR_UINT8 | HARDWARE_VALUE | MODE_ARRAY, .config.array.length = PINIO_COUNT, PG_PINIO_CONFIG, offsetof(pinioConfig_t, config) },
#ifdef USE_PINIOBOX{ "pinio_box", VAR_UINT8 | HARDWARE_VALUE | MODE_ARRAY, .config.array.length = PINIO_COUNT, PG_PINIOBOX_CONFIG, offsetof(pinioBoxConfig_t, permanentId) },
#endif
#endif//PG USB
#ifdef USE_USB_CDC_HID{ "usb_hid_cdc", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_USB_CONFIG, offsetof(usbDev_t, type) },
#endif
#ifdef USE_USB_MSC{ "usb_msc_pin_pullup", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_USB_CONFIG, offsetof(usbDev_t, mscButtonUsePullup) },
#endif
// PG_FLASH_CONFIG
#ifdef USE_FLASH_SPI{ "flash_spi_bus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, SPIDEV_COUNT }, PG_FLASH_CONFIG, offsetof(flashConfig_t, spiDevice) },
#endif
// RCDEVICE
#ifdef USE_RCDEVICE{ "rcdevice_init_dev_attempts", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 10 }, PG_RCDEVICE_CONFIG, offsetof(rcdeviceConfig_t, initDeviceAttempts) },{ "rcdevice_init_dev_attempt_interval", VAR_UINT32 | MASTER_VALUE, .config.u32Max = 5000, PG_RCDEVICE_CONFIG, offsetof(rcdeviceConfig_t, initDeviceAttemptInterval) },{ "rcdevice_protocol_version", VAR_UINT8 | MASTER_VALUE, .config.minmax = { 0, 1 }, PG_RCDEVICE_CONFIG, offsetof(rcdeviceConfig_t, protocolVersion) },{ "rcdevice_feature", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = {0, 65535}, PG_RCDEVICE_CONFIG, offsetof(rcdeviceConfig_t, feature) },
#endif// PG_GYRO_DEVICE_CONFIG{ "gyro_1_bustype", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_BUS_TYPE }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 0, busType) },{ "gyro_1_spibus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, SPIDEV_COUNT }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 0, spiBus) },{ "gyro_1_i2cBus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, I2CDEV_COUNT }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 0, i2cBus) },{ "gyro_1_i2c_address", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, I2C_ADDR7_MAX }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 0, i2cAddress) },{ "gyro_1_sensor_align", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_ALIGNMENT }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 0, alignment) },{ "gyro_1_align_roll", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 0, customAlignment.roll) },{ "gyro_1_align_pitch", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 0, customAlignment.pitch) },{ "gyro_1_align_yaw", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 0, customAlignment.yaw) },
#ifdef USE_MULTI_GYRO{ "gyro_2_bustype", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_BUS_TYPE }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 1, busType) },{ "gyro_2_spibus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, SPIDEV_COUNT }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 1, spiBus) },{ "gyro_2_i2cBus", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, I2CDEV_COUNT }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 1, i2cBus) },{ "gyro_2_i2c_address", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, I2C_ADDR7_MAX }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 1, i2cAddress) },{ "gyro_2_sensor_align", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_ALIGNMENT }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 1, alignment) },{ "gyro_2_align_roll", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 1, customAlignment.roll) },{ "gyro_2_align_pitch", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 1, customAlignment.pitch) },{ "gyro_2_align_yaw", VAR_INT16 | HARDWARE_VALUE, .config.minmax = { -3600, 3600 }, PG_GYRO_DEVICE_CONFIG, PG_ARRAY_ELEMENT_OFFSET(gyroDeviceConfig_t, 1, customAlignment.yaw) },
#endif
#ifdef I2C_FULL_RECONFIGURABILITY
#ifdef USE_I2C_DEVICE_1{ "i2c1_pullup", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_I2C_CONFIG, PG_ARRAY_ELEMENT_OFFSET(i2cConfig_t, 0, pullUp) },{ "i2c1_clockspeed_khz", VAR_UINT16 | HARDWARE_VALUE, .config.minmax = { I2C_CLOCKSPEED_MIN_KHZ, I2C_CLOCKSPEED_MAX_KHZ }, PG_I2C_CONFIG, PG_ARRAY_ELEMENT_OFFSET(i2cConfig_t, 0, clockSpeed) },
#endif
#ifdef USE_I2C_DEVICE_2{ "i2c2_pullup", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_I2C_CONFIG, PG_ARRAY_ELEMENT_OFFSET(i2cConfig_t, 1, pullUp) },{ "i2c2_clockspeed_khz", VAR_UINT16 | HARDWARE_VALUE, .config.minmax = { I2C_CLOCKSPEED_MIN_KHZ, I2C_CLOCKSPEED_MAX_KHZ }, PG_I2C_CONFIG, PG_ARRAY_ELEMENT_OFFSET(i2cConfig_t, 1, clockSpeed) },
#endif
#ifdef USE_I2C_DEVICE_3{ "i2c3_pullup", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_I2C_CONFIG, PG_ARRAY_ELEMENT_OFFSET(i2cConfig_t, 2, pullUp) },{ "i2c3_clockspeed_khz", VAR_UINT16 | HARDWARE_VALUE, .config.minmax = { I2C_CLOCKSPEED_MIN_KHZ, I2C_CLOCKSPEED_MAX_KHZ }, PG_I2C_CONFIG, PG_ARRAY_ELEMENT_OFFSET(i2cConfig_t, 2, clockSpeed) },
#endif
#ifdef USE_I2C_DEVICE_4{ "i2c4_pullup", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_I2C_CONFIG, PG_ARRAY_ELEMENT_OFFSET(i2cConfig_t, 3, pullUp) },{ "i2c4_clockspeed_khz", VAR_UINT16 | HARDWARE_VALUE, .config.minmax = { I2C_CLOCKSPEED_MIN_KHZ, I2C_CLOCKSPEED_MAX_KHZ }, PG_I2C_CONFIG, PG_ARRAY_ELEMENT_OFFSET(i2cConfig_t, 3, clockSpeed) },
#endif
#endif
#ifdef USE_MCO
#ifdef STM32G4{ "mco_on_pa8", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MCO_CONFIG, PG_ARRAY_ELEMENT_OFFSET(mcoConfig_t, 0, enabled) },{ "mco_source", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, MCO_SOURCE_COUNT - 1 }, PG_MCO_CONFIG, PG_ARRAY_ELEMENT_OFFSET(mcoConfig_t, 0, source) },{ "mco_divider", VAR_UINT8 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, MCO_DIVIDER_COUNT - 1 }, PG_MCO_CONFIG, PG_ARRAY_ELEMENT_OFFSET(mcoConfig_t, 0, divider) },
#else{ "mco2_on_pc9", VAR_UINT8 | HARDWARE_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MCO_CONFIG, PG_ARRAY_ELEMENT_OFFSET(mcoConfig_t, 1, enabled) },
#endif
#endif
#ifdef USE_RX_SPEKTRUM{ "spektrum_spi_protocol", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_RX_SPEKTRUM_SPI_CONFIG, offsetof(spektrumConfig_t, protocol) },{ "spektrum_spi_mfg_id", VAR_UINT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = 4, PG_RX_SPEKTRUM_SPI_CONFIG, offsetof(spektrumConfig_t, mfgId) },{ "spektrum_spi_num_channels", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, DSM_MAX_CHANNEL_COUNT }, PG_RX_SPEKTRUM_SPI_CONFIG, offsetof(spektrumConfig_t, numChannels) },
#endif
#ifdef USE_RX_EXPRESSLRS{ "expresslrs_uid", VAR_UINT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = 6, PG_RX_EXPRESSLRS_SPI_CONFIG, offsetof(rxExpressLrsSpiConfig_t, UID) },{ "expresslrs_domain", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_FREQ_DOMAIN }, PG_RX_EXPRESSLRS_SPI_CONFIG, offsetof(rxExpressLrsSpiConfig_t, domain) },{ "expresslrs_rate_index", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 3 }, PG_RX_EXPRESSLRS_SPI_CONFIG, offsetof(rxExpressLrsSpiConfig_t, rateIndex) },{ "expresslrs_switch_mode", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_SWITCH_MODE }, PG_RX_EXPRESSLRS_SPI_CONFIG, offsetof(rxExpressLrsSpiConfig_t, switchMode) },{ "expresslrs_model_id", VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, UINT8_MAX }, PG_RX_EXPRESSLRS_SPI_CONFIG, offsetof(rxExpressLrsSpiConfig_t, modelId) },
#endif{ "scheduler_relax_rx", VAR_UINT16 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, 500 }, PG_SCHEDULER_CONFIG, PG_ARRAY_ELEMENT_OFFSET(schedulerConfig_t, 0, rxRelaxDeterminism) },{ "scheduler_relax_osd", VAR_UINT16 | HARDWARE_VALUE, .config.minmaxUnsigned = { 0, 500 }, PG_SCHEDULER_CONFIG, PG_ARRAY_ELEMENT_OFFSET(schedulerConfig_t, 0, osdRelaxDeterminism) },{ "serialmsp_halfduplex", VAR_UINT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_OFF_ON }, PG_MSP_CONFIG, offsetof(mspConfig_t, halfDuplex) },// PG_TIMECONFIG
#ifdef USE_RTC_TIME{ "timezone_offset_minutes", VAR_INT16 | MASTER_VALUE, .config.minmax = { TIMEZONE_OFFSET_MINUTES_MIN, TIMEZONE_OFFSET_MINUTES_MAX }, PG_TIME_CONFIG, offsetof(timeConfig_t, tz_offsetMinutes) },
#endif#ifdef USE_RPM_FILTER{ PARAM_NAME_RPM_FILTER_HARMONICS, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 3 }, PG_RPM_FILTER_CONFIG, offsetof(rpmFilterConfig_t, rpm_filter_harmonics) },{ PARAM_NAME_RPM_FILTER_Q, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 250, 3000 }, PG_RPM_FILTER_CONFIG, offsetof(rpmFilterConfig_t, rpm_filter_q) },{ PARAM_NAME_RPM_FILTER_MIN_HZ, VAR_UINT8 | MASTER_VALUE, .config.minmaxUnsigned = { 30, 200 }, PG_RPM_FILTER_CONFIG, offsetof(rpmFilterConfig_t, rpm_filter_min_hz) },{ PARAM_NAME_RPM_FILTER_FADE_RANGE_HZ, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 1000 }, PG_RPM_FILTER_CONFIG, offsetof(rpmFilterConfig_t, rpm_filter_fade_range_hz) },{ PARAM_NAME_RPM_FILTER_LPF_HZ, VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 100, 500 }, PG_RPM_FILTER_CONFIG, offsetof(rpmFilterConfig_t, rpm_filter_lpf_hz) },
#endif#ifdef USE_RX_FLYSKY{ "flysky_spi_tx_id", VAR_UINT32 | MASTER_VALUE, .config.u32Max = UINT32_MAX, PG_FLYSKY_CONFIG, offsetof(flySkyConfig_t, txId) },{ "flysky_spi_rf_channels", VAR_UINT8 | MASTER_VALUE | MODE_ARRAY, .config.array.length = 16, PG_FLYSKY_CONFIG, offsetof(flySkyConfig_t, rfChannelMap) },
#endif#ifdef USE_PERSISTENT_STATS{ "stats_min_armed_time_s", VAR_INT8 | MASTER_VALUE, .config.minmax = { STATS_OFF, INT8_MAX }, PG_STATS_CONFIG, offsetof(statsConfig_t, stats_min_armed_time_s) },{ "stats_total_flights", VAR_UINT32 | MASTER_VALUE, .config.u32Max = UINT32_MAX, PG_STATS_CONFIG, offsetof(statsConfig_t, stats_total_flights) },{ "stats_total_time_s", VAR_UINT32 | MASTER_VALUE, .config.u32Max = UINT32_MAX, PG_STATS_CONFIG, offsetof(statsConfig_t, stats_total_time_s) },{ "stats_total_dist_m", VAR_UINT32 | MASTER_VALUE, .config.u32Max = UINT32_MAX, PG_STATS_CONFIG, offsetof(statsConfig_t, stats_total_dist_m) },#ifdef USE_BATTERY_CONTINUE{ "stats_mah_used", VAR_UINT32 | MASTER_VALUE, .config.u32Max = UINT32_MAX, PG_STATS_CONFIG, offsetof(statsConfig_t, stats_mah_used) },
#endif
#endif{ "craft_name", VAR_UINT8 | MASTER_VALUE | MODE_STRING, .config.string = { 1, MAX_NAME_LENGTH, STRING_FLAGS_NONE }, PG_PILOT_CONFIG, offsetof(pilotConfig_t, craftName) },
#ifdef USE_OSD{ "pilot_name", VAR_UINT8 | MASTER_VALUE | MODE_STRING, .config.string = { 1, MAX_NAME_LENGTH, STRING_FLAGS_NONE }, PG_PILOT_CONFIG, offsetof(pilotConfig_t, pilotName) },
#endif// PG_POSITION{ "altitude_source", VAR_INT8 | MASTER_VALUE | MODE_LOOKUP, .config.lookup = { TABLE_POSITION_ALT_SOURCE }, PG_POSITION, offsetof(positionConfig_t, altitude_source) },{ "altitude_prefer_baro", VAR_INT8 | MASTER_VALUE, .config.minmaxUnsigned = { 0, 100 }, PG_POSITION, offsetof(positionConfig_t, altitude_prefer_baro) },{ "altitude_lpf", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 10, 1000 }, PG_POSITION, offsetof(positionConfig_t, altitude_lpf) },{ "altitude_d_lpf", VAR_UINT16 | MASTER_VALUE, .config.minmaxUnsigned = { 10, 1000 }, PG_POSITION, offsetof(positionConfig_t, altitude_d_lpf) },// PG_MODE_ACTIVATION_CONFIG
#if defined(USE_CUSTOM_BOX_NAMES){ "box_user_1_name", VAR_UINT8 | HARDWARE_VALUE | MODE_STRING, .config.string = { 1, MAX_BOX_USER_NAME_LENGTH, STRING_FLAGS_NONE }, PG_MODE_ACTIVATION_CONFIG, offsetof(modeActivationConfig_t, box_user_1_name) },{ "box_user_2_name", VAR_UINT8 | HARDWARE_VALUE | MODE_STRING, .config.string = { 1, MAX_BOX_USER_NAME_LENGTH, STRING_FLAGS_NONE }, PG_MODE_ACTIVATION_CONFIG, offsetof(modeActivationConfig_t, box_user_2_name) },{ "box_user_3_name", VAR_UINT8 | HARDWARE_VALUE | MODE_STRING, .config.string = { 1, MAX_BOX_USER_NAME_LENGTH, STRING_FLAGS_NONE }, PG_MODE_ACTIVATION_CONFIG, offsetof(modeActivationConfig_t, box_user_3_name) },{ "box_user_4_name", VAR_UINT8 | HARDWARE_VALUE | MODE_STRING, .config.string = { 1, MAX_BOX_USER_NAME_LENGTH, STRING_FLAGS_NONE }, PG_MODE_ACTIVATION_CONFIG, offsetof(modeActivationConfig_t, box_user_4_name) },
#endif
};const uint16_t valueTableEntryCount = ARRAYLEN(valueTable);
按照变量定义可以分为以下几大类:
- MODE_DIRECT
- MODE_LOOKUP/MODE_BITSET
- MODE_ARRAY (VAR_UINT8/VAR_INT8/VAR_UINT16/VAR_INT16/VAR_UINT32/)
- MODE_STRING
至于每个参量的含义,这里就不展开,随着对系统的深入理解,慢慢就会一点点了解起来的。“着急吃不了热豆腐”还是很有哲学深度的。不过,这里我们可以先整体上有个概念。
2. 代码分析
cliSet├──> <len == 0 || (len == 1 && cmdline[0] == '*')> [Print all parameters in valueTable]├──> <(eqptr = strstr(cmdline, "=")) != NULL> //赋值命令│ ├──> [get parameter name and index in valueTable] error return│ ├──> [get original parameter value]│ │ ├──> MODE_DIRECT (VALUE_TYPE_MASK: VAR_UINT32)│ │ │ └──> [Validation check] cliSetVar(val, value)│ │ ├──> MODE_LOOKUP/MODE_BITSET (VALUE_TYPE_MASK: MODE_BITSET)│ │ │ └──> [Validation check] cliSetVar(val, value)│ │ ├──> MODE_ARRAY (VALUE_TYPE_MASK: VAR_UINT8/VAR_INT8/VAR_UINT16/VAR_INT16/VAR_UINT32/)│ │ │ └──> [Validation check] cliSetVar(val, value)│ │ └──> MODE_STRING│ │ └──> [Validation check] strncpy((char *)cliGetValuePointer(val), valPtr, len);│ ├──> <valueChanged> cliPrintf("%s set to ", val->name);cliPrintVar(cmdName, val, 0);│ └──> <!valueChanged> cliPrintErrorLinef(cmdName, "INVALID VALUE");cliPrintVarRange(val);└──> <(eqptr = strstr(cmdline, "=")) == NULL> //非赋值命令└──> cliGet(cmdName, cmdline);
3. 实例分析
厂商主要设置的变量针对板级硬件配置,应用级参数将需要用户自行定义或者配置。
set gyro_to_use = BOTH
set mag_bustype = I2C
set mag_i2c_device = 1
set baro_bustype = I2C
set baro_i2c_device = 2
set blackbox_device = SPIFLASH
set current_meter = ADC
set battery_meter = ADC
set ibata_scale = 500
set beeper_inversion = ON
set beeper_od = OFF
set max7456_spi_bus = 2
set pinio_config = 129,1,1,1
set pinio_box = 39,40,255,255
set flash_spi_bus = 3
set gyro_1_bustype = SPI
set gyro_1_spibus = 1
set gyro_1_sensor_align = CW90
set gyro_1_align_yaw = 900
set gyro_2_spibus = 4
set gyro_2_sensor_align = CW180
set gyro_2_align_yaw = 1800
4. 配置情况
# help set
set - change setting[<name>=<value>]
4.1 set
# set
Current settings:
gyro_hardware_lpf = NORMAL
gyro_lpf1_type = PT1
gyro_lpf1_static_hz = 250
gyro_lpf2_type = PT1
gyro_lpf2_static_hz = 500
gyro_notch1_hz = 0
gyro_notch1_cutoff = 0
gyro_notch2_hz = 0
gyro_notch2_cutoff = 0
gyro_calib_duration = 125
gyro_calib_noise_limit = 48
gyro_offset_yaw = 0
gyro_overflow_detect = ALL
yaw_spin_recovery = AUTO
yaw_spin_threshold = 1950
gyro_to_use = BOTH
dyn_notch_count = 3
dyn_notch_q = 300
dyn_notch_min_hz = 150
dyn_notch_max_hz = 600
gyro_lpf1_dyn_min_hz = 250
gyro_lpf1_dyn_max_hz = 500
gyro_lpf1_dyn_expo = 5
gyro_filter_debug_axis = ROLL
acc_hardware = AUTO
acc_lpf_hz = 10
acc_trim_pitch = 0
acc_trim_roll = 0
acc_calibration = 22,-6,40,1
align_mag = DEFAULT
mag_align_roll = 0
mag_align_pitch = 0
mag_align_yaw = 0
mag_bustype = I2C
mag_i2c_device = 1
mag_i2c_address = 0
mag_spi_device = 0
mag_hardware = AUTO
mag_calibration = 0,0,0
baro_bustype = I2C
baro_spi_device = 0
baro_i2c_device = 2
baro_i2c_address = 0
baro_hardware = AUTO
baro_tab_size = 21
baro_noise_lpf = 600
baro_cf_vel = 985
mid_rc = 1500
min_check = 1050
max_check = 1900
rssi_channel = 0
rssi_src_frame_errors = OFF
rssi_scale = 100
rssi_offset = 0
rssi_invert = OFF
rssi_src_frame_lpf_period = 30
rc_smoothing = ON
rc_smoothing_auto_factor = 30
rc_smoothing_auto_factor_throttle = 30
rc_smoothing_setpoint_cutoff = 0
rc_smoothing_feedforward_cutoff = 0
rc_smoothing_throttle_cutoff = 0
rc_smoothing_debug_axis = ROLL
fpv_mix_degrees = 0
max_aux_channels = 14
serialrx_provider = SBUS
serialrx_inverted = OFF
spektrum_sat_bind = 0
spektrum_sat_bind_autoreset = ON
srxl2_unit_id = 1
srxl2_baud_fast = ON
sbus_baud_fast = OFF
crsf_use_rx_snr = OFF
airmode_start_throttle_percent = 25
rx_min_usec = 885
rx_max_usec = 2115
serialrx_halfduplex = OFF
msp_override_channels_mask = 0
rx_spi_protocol = V202_250K
rx_spi_bus = 0
rx_spi_led_inversion = OFF
adc_device = 1
adc_vrefint_calibration = 0
adc_tempsensor_calibration30 = 0
adc_tempsensor_calibration110 = 0
input_filtering_mode = OFF
blackbox_sample_rate = 1/4
blackbox_device = SPIFLASH
blackbox_disable_pids = OFF
blackbox_disable_rc = OFF
blackbox_disable_setpoint = OFF
blackbox_disable_bat = OFF
blackbox_disable_mag = OFF
blackbox_disable_alt = OFF
blackbox_disable_rssi = OFF
blackbox_disable_gyro = OFF
blackbox_disable_acc = OFF
blackbox_disable_debug = OFF
blackbox_disable_motors = OFF
blackbox_disable_gps = OFF
blackbox_mode = NORMAL
min_throttle = 1070
max_throttle = 2000
min_command = 1000
dshot_idle_value = 550
dshot_burst = OFF
dshot_bidir = OFF
dshot_bitbang = AUTO
dshot_bitbang_timer = AUTO
use_unsynced_pwm = OFF
motor_pwm_protocol = DSHOT600
motor_pwm_rate = 480
motor_pwm_inversion = OFF
motor_poles = 14
motor_output_reordering = 0,1,2,3,4,5,6,7
thr_corr_value = 0
thr_corr_angle = 800
failsafe_delay = 4
failsafe_off_delay = 10
failsafe_throttle = 1000
failsafe_switch_mode = STAGE1
failsafe_throttle_low_delay = 100
failsafe_procedure = DROP
failsafe_recovery_delay = 20
failsafe_stick_threshold = 30
align_board_roll = 0
align_board_pitch = 0
align_board_yaw = 0
gimbal_mode = NORMAL
bat_capacity = 0
vbat_max_cell_voltage = 430
vbat_full_cell_voltage = 410
vbat_min_cell_voltage = 330
vbat_warning_cell_voltage = 350
vbat_hysteresis = 1
current_meter = ADC
battery_meter = ADC
vbat_detect_cell_voltage = 300
use_vbat_alerts = ON
use_cbat_alerts = OFF
cbat_alert_percent = 10
vbat_cutoff_percent = 100
force_battery_cell_count = 0
vbat_display_lpf_period = 30
vbat_sag_lpf_period = 2
ibat_lpf_period = 10
vbat_duration_for_warning = 0
vbat_duration_for_critical = 0
vbat_scale = 110
vbat_divider = 10
vbat_multiplier = 1
ibata_scale = 500
ibata_offset = 0
ibatv_scale = 0
ibatv_offset = 0
beeper_inversion = ON
beeper_od = OFF
beeper_frequency = 0
beeper_dshot_beacon_tone = 1
yaw_motors_reversed = OFF
mixer_type = LEGACY
crashflip_motor_percent = 0
crashflip_expo = 35
3d_deadband_low = 1406
3d_deadband_high = 1514
3d_neutral = 1460
3d_deadband_throttle = 50
3d_limit_low = 1000
3d_limit_high = 2000
3d_switched_mode = OFF
servo_center_pulse = 1500
servo_pwm_rate = 50
servo_lowpass_hz = 0
tri_unarmed_servo = ON
channel_forwarding_start = 4
rateprofile_name = -
thr_mid = 50
thr_expo = 0
rates_type = ACTUAL
quickrates_rc_expo = OFF
roll_rc_rate = 7
pitch_rc_rate = 7
yaw_rc_rate = 7
roll_expo = 0
pitch_expo = 0
yaw_expo = 0
roll_srate = 67
pitch_srate = 67
yaw_srate = 67
tpa_rate = 65
tpa_breakpoint = 1350
tpa_mode = D
throttle_limit_type = OFF
throttle_limit_percent = 100
roll_rate_limit = 1998
pitch_rate_limit = 1998
yaw_rate_limit = 1998
roll_level_expo = 0
pitch_level_expo = 0
reboot_character = 82
serial_update_rate_hz = 100
imu_dcm_kp = 2500
imu_dcm_ki = 0
small_angle = 25
auto_disarm_delay = 5
gyro_cal_on_first_arm = OFF
gps_provider = NMEA
gps_sbas_mode = NONE
gps_sbas_integrity = OFF
gps_auto_config = ON
gps_auto_baud = OFF
gps_ublox_use_galileo = OFF
gps_ublox_mode = AIRBORNE
gps_set_home_point_once = OFF
gps_use_3d_speed = OFF
gps_rescue_angle = 32
gps_rescue_alt_buffer = 15
gps_rescue_initial_alt = 50
gps_rescue_descent_dist = 200
gps_rescue_landing_alt = 5
gps_rescue_landing_dist = 10
gps_rescue_ground_speed = 2000
gps_rescue_throttle_p = 150
gps_rescue_throttle_i = 20
gps_rescue_throttle_d = 50
gps_rescue_velocity_p = 80
gps_rescue_velocity_i = 20
gps_rescue_velocity_d = 15
gps_rescue_yaw_p = 40
gps_rescue_throttle_min = 1100
gps_rescue_throttle_max = 1600
gps_rescue_ascend_rate = 500
gps_rescue_descend_rate = 150
gps_rescue_throttle_hover = 1280
gps_rescue_sanity_checks = RESCUE_SANITY_ON
gps_rescue_min_sats = 8
gps_rescue_min_dth = 100
gps_rescue_allow_arming_without_fix = OFF
gps_rescue_alt_mode = MAX_ALT
gps_rescue_use_mag = ON
deadband = 0
yaw_deadband = 0
yaw_control_reversed = OFF
pid_process_denom = 1
runaway_takeoff_prevention = ON
runaway_takeoff_deactivate_delay = 500
runaway_takeoff_deactivate_throttle_percent = 20
profile_name = -
dterm_lpf1_dyn_min_hz = 75
dterm_lpf1_dyn_max_hz = 150
dterm_lpf1_dyn_expo = 5
dterm_lpf1_type = PT1
dterm_lpf1_static_hz = 75
dterm_lpf2_type = PT1
dterm_lpf2_static_hz = 150
dterm_notch_hz = 0
dterm_notch_cutoff = 0
vbat_sag_compensation = 0
pid_at_min_throttle = ON
anti_gravity_mode = SMOOTH
anti_gravity_threshold = 250
anti_gravity_gain = 3500
acc_limit_yaw = 0
acc_limit = 0
crash_dthreshold = 50
crash_gthreshold = 400
crash_setpoint_threshold = 350
crash_time = 500
crash_delay = 0
crash_recovery_angle = 10
crash_recovery_rate = 100
crash_limit_yaw = 200
crash_recovery = OFF
iterm_rotation = OFF
iterm_relax = RP
iterm_relax_type = SETPOINT
iterm_relax_cutoff = 15
iterm_windup = 85
iterm_limit = 400
pidsum_limit = 500
pidsum_limit_yaw = 400
yaw_lowpass_hz = 100
throttle_boost = 5
throttle_boost_cutoff = 15
acro_trainer_angle_limit = 20
acro_trainer_lookahead_ms = 50
acro_trainer_debug_axis = ROLL
acro_trainer_gain = 75
p_pitch = 47
i_pitch = 84
d_pitch = 46
f_pitch = 125
p_roll = 45
i_roll = 80
d_roll = 40
f_roll = 120
p_yaw = 45
i_yaw = 80
d_yaw = 0
f_yaw = 120
angle_level_strength = 50
horizon_level_strength = 50
horizon_transition = 75
level_limit = 55
horizon_tilt_effect = 75
horizon_tilt_expert_mode = OFF
abs_control_gain = 0
abs_control_limit = 90
abs_control_error_limit = 20
abs_control_cutoff = 11
use_integrated_yaw = OFF
integrated_yaw_relax = 200
d_min_roll = 30
d_min_pitch = 34
d_min_yaw = 0
d_max_gain = 37
d_max_advance = 20
motor_output_limit = 100
auto_profile_cell_count = 0
launch_control_mode = NORMAL
launch_trigger_allow_reset = ON
launch_trigger_throttle_percent = 20
launch_angle_limit = 0
launch_control_gain = 40
thrust_linear = 0
transient_throttle_limit = 0
feedforward_transition = 0
feedforward_averaging = OFF
feedforward_smooth_factor = 25
feedforward_jitter_factor = 7
feedforward_boost = 15
feedforward_max_rate_limit = 90
dyn_idle_min_rpm = 0
dyn_idle_p_gain = 50
dyn_idle_i_gain = 50
dyn_idle_d_gain = 50
dyn_idle_max_increase = 150
level_race_mode = OFF
simplified_pids_mode = RPY
simplified_master_multiplier = 100
simplified_i_gain = 100
simplified_d_gain = 100
simplified_pi_gain = 100
simplified_dmax_gain = 100
simplified_feedforward_gain = 100
simplified_pitch_d_gain = 100
simplified_pitch_pi_gain = 100
simplified_dterm_filter = ON
simplified_dterm_filter_multiplier = 100
simplified_gyro_filter = ON
simplified_gyro_filter_multiplier = 100
tlm_inverted = OFF
tlm_halfduplex = ON
frsky_default_lat = 0
frsky_default_long = 0
frsky_gps_format = 0
frsky_unit = METRIC
frsky_vfas_precision = 0
hott_alarm_int = 5
pid_in_tlm = OFF
report_cell_voltage = OFF
ibus_sensor = 1,2,3,0,0,0,0,0,0,0,0,0,0,0,0
mavlink_mah_as_heading_divisor = 0
telemetry_disabled_voltage = OFF
telemetry_disabled_current = OFF
telemetry_disabled_fuel = OFF
telemetry_disabled_mode = OFF
telemetry_disabled_acc_x = OFF
telemetry_disabled_acc_y = OFF
telemetry_disabled_acc_z = OFF
telemetry_disabled_pitch = OFF
telemetry_disabled_roll = OFF
telemetry_disabled_heading = OFF
telemetry_disabled_altitude = OFF
telemetry_disabled_vario = OFF
telemetry_disabled_lat_long = OFF
telemetry_disabled_ground_speed = OFF
telemetry_disabled_distance = OFF
telemetry_disabled_esc_current = ON
telemetry_disabled_esc_voltage = ON
telemetry_disabled_esc_rpm = ON
telemetry_disabled_esc_temperature = ON
telemetry_disabled_temperature = OFF
telemetry_disabled_cap_used = ON
ledstrip_visual_beeper = OFF
ledstrip_visual_beeper_color = WHITE
ledstrip_grb_rgb = GRB
ledstrip_profile = STATUS
ledstrip_race_color = ORANGE
ledstrip_beacon_color = WHITE
ledstrip_beacon_period_ms = 500
ledstrip_beacon_percent = 50
ledstrip_beacon_armed_only = OFF
ledstrip_brightness = 100
sdcard_detect_inverted = OFF
sdcard_mode = SDIO
sdcard_spi_bus = 0
sdio_clk_bypass = OFF
sdio_use_cache = OFF
sdio_use_4bit_width = OFF
sdio_device = 0
osd_units = METRIC
osd_warn_arming_disable = ON
osd_warn_batt_not_full = ON
osd_warn_batt_warning = ON
osd_warn_batt_critical = ON
osd_warn_visual_beeper = ON
osd_warn_crash_flip = ON
osd_warn_esc_fail = ON
osd_warn_core_temp = ON
osd_warn_rc_smoothing = ON
osd_warn_fail_safe = ON
osd_warn_launch_control = ON
osd_warn_no_gps_rescue = ON
osd_warn_gps_rescue_disabled = ON
osd_warn_rssi = OFF
osd_warn_link_quality = OFF
osd_warn_rssi_dbm = OFF
osd_warn_over_cap = OFF
osd_rssi_alarm = 20
osd_link_quality_alarm = 80
osd_rssi_dbm_alarm = -60
osd_cap_alarm = 2200
osd_alt_alarm = 100
osd_distance_alarm = 0
osd_esc_temp_alarm = -128
osd_esc_rpm_alarm = -1
osd_esc_current_alarm = -1
osd_core_temp_alarm = 70
osd_ah_max_pit = 20
osd_ah_max_rol = 40
osd_ah_invert = OFF
osd_logo_on_arming = OFF
osd_logo_on_arming_duration = 5
osd_tim1 = 2560
osd_tim2 = 2561
osd_vbat_pos = 234
osd_rssi_pos = 234
osd_link_quality_pos = 234
osd_link_tx_power_pos = 234
osd_rssi_dbm_pos = 234
osd_tim_1_pos = 234
osd_tim_2_pos = 234
osd_remaining_time_estimate_pos = 234
osd_flymode_pos = 234
osd_anti_gravity_pos = 234
osd_g_force_pos = 234
osd_throttle_pos = 234
osd_vtx_channel_pos = 234
osd_crosshairs_pos = 205
osd_ah_sbar_pos = 206
osd_ah_pos = 78
osd_current_pos = 234
osd_mah_drawn_pos = 234
osd_motor_diag_pos = 234
osd_craft_name_pos = 234
osd_display_name_pos = 234
osd_gps_speed_pos = 234
osd_gps_lon_pos = 234
osd_gps_lat_pos = 234
osd_gps_sats_pos = 234
osd_home_dir_pos = 234
osd_home_dist_pos = 234
osd_flight_dist_pos = 234
osd_compass_bar_pos = 234
osd_altitude_pos = 234
osd_pid_roll_pos = 234
osd_pid_pitch_pos = 234
osd_pid_yaw_pos = 234
osd_debug_pos = 234
osd_power_pos = 234
osd_pidrate_profile_pos = 234
osd_warnings_pos = 14665
osd_avg_cell_voltage_pos = 234
osd_pit_ang_pos = 234
osd_rol_ang_pos = 234
osd_battery_usage_pos = 234
osd_disarmed_pos = 234
osd_nheading_pos = 234
osd_up_down_reference_pos = 205
osd_nvario_pos = 234
osd_esc_tmp_pos = 234
osd_esc_rpm_pos = 234
osd_esc_rpm_freq_pos = 234
osd_rtc_date_time_pos = 234
osd_adjustment_range_pos = 234
osd_flip_arrow_pos = 234
osd_core_temp_pos = 234
osd_log_status_pos = 234
osd_stick_overlay_left_pos = 234
osd_stick_overlay_right_pos = 234
osd_stick_overlay_radio_mode = 2
osd_rate_profile_name_pos = 234
osd_pid_profile_name_pos = 234
osd_profile_name_pos = 234
osd_rcchannels_pos = 234
osd_camera_frame_pos = 35
osd_efficiency_pos = 234
osd_total_flights_pos = 234
osd_stat_rtc_date_time = OFF
osd_stat_tim_1 = OFF
osd_stat_tim_2 = ON
osd_stat_max_spd = ON
osd_stat_max_dist = OFF
osd_stat_min_batt = ON
osd_stat_endbatt = OFF
osd_stat_battery = OFF
osd_stat_min_rssi = ON
osd_stat_max_curr = ON
osd_stat_used_mah = ON
osd_stat_max_alt = OFF
osd_stat_bbox = ON
osd_stat_bb_no = ON
osd_stat_max_g_force = OFF
osd_stat_max_esc_temp = OFF
osd_stat_max_esc_rpm = OFF
osd_stat_min_link_quality = OFF
osd_stat_flight_dist = OFF
osd_stat_max_fft = OFF
osd_stat_total_flights = OFF
osd_stat_total_time = OFF
osd_stat_total_dist = OFF
osd_stat_min_rssi_dbm = OFF
osd_profile = 1
osd_profile_1_name = -
osd_profile_2_name = -
osd_profile_3_name = -
osd_gps_sats_show_hdop = OFF
osd_displayport_device = AUTO
osd_rcchannels = -1,-1,-1,-1
osd_camera_frame_width = 24
osd_camera_frame_height = 11
osd_stat_avg_cell_value = OFF
osd_framerate_hz = 12
osd_menu_background = TRANSPARENT
task_statistics = ON
debug_mode = NONE
rate_6pos_switch = OFF
pwr_on_arm_grace = 5
enable_stick_arming = OFF
vtx_band = 0
vtx_channel = 0
vtx_power = 0
vtx_low_power_disarm = OFF
vtx_softserial_alt = OFF
vtx_freq = 0
vtx_pit_mode_freq = 0
vtx_halfduplex = ON
vtx_spi_bus = 0
vcd_video_system = AUTO
vcd_h_offset = 0
vcd_v_offset = 0
max7456_clock = NOMINAL
max7456_spi_bus = 2
max7456_preinit_opu = OFF
displayport_msp_col_adjust = 0
displayport_msp_row_adjust = 0
displayport_msp_serial = -1
displayport_msp_attrs = 0,0,0,0
displayport_msp_use_device_blink = OFF
displayport_max7456_col_adjust = 0
displayport_max7456_row_adjust = 0
displayport_max7456_inv = OFF
displayport_max7456_blk = 0
displayport_max7456_wht = 2
esc_sensor_halfduplex = OFF
esc_sensor_current_offset = 0
frsky_spi_autobind = OFF
frsky_spi_tx_id = 0,0,0
frsky_spi_offset = 0
frsky_spi_bind_hop_data = 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0
frsky_x_rx_num = 0
frsky_spi_a1_source = VBAT
cc2500_spi_chip_detect = ON
led_inversion = 0
dashboard_i2c_bus = 0
dashboard_i2c_addr = 60
camera_control_mode = HARDWARE_PWM
camera_control_ref_voltage = 330
camera_control_key_delay = 180
camera_control_internal_resistance = 470
camera_control_button_resistance = 450,270,150,68,0
camera_control_inverted = OFF
rangefinder_hardware = NONE
pinio_config = 1,1,1,1
pinio_box = 40,41,255,255
usb_hid_cdc = OFF
usb_msc_pin_pullup = ON
flash_spi_bus = 3
rcdevice_init_dev_attempts = 6
rcdevice_init_dev_attempt_interval = 1000
rcdevice_protocol_version = 0
rcdevice_feature = 0
gyro_1_bustype = SPI
gyro_1_spibus = 1
gyro_1_i2cBus = 0
gyro_1_i2c_address = 0
gyro_1_sensor_align = CW90
gyro_1_align_roll = 0
gyro_1_align_pitch = 0
gyro_1_align_yaw = 900
gyro_2_bustype = SPI
gyro_2_spibus = 4
gyro_2_i2cBus = 0
gyro_2_i2c_address = 0
gyro_2_sensor_align = CW180
gyro_2_align_roll = 0
gyro_2_align_pitch = 0
gyro_2_align_yaw = 1800
i2c1_pullup = OFF
i2c1_clockspeed_khz = 800
i2c2_pullup = OFF
i2c2_clockspeed_khz = 800
i2c3_pullup = OFF
i2c3_clockspeed_khz = 800
i2c4_pullup = OFF
i2c4_clockspeed_khz = 800
spektrum_spi_protocol = 0
spektrum_spi_mfg_id = 0,0,0,0
spektrum_spi_num_channels = 0
expresslrs_uid = 0,0,0,0,0,0
expresslrs_domain = AU433
expresslrs_rate_index = 0
expresslrs_switch_mode = HYBRID
expresslrs_model_id = 255
scheduler_relax_rx = 25
scheduler_relax_osd = 25
timezone_offset_minutes = 0
rpm_filter_harmonics = 3
rpm_filter_q = 500
rpm_filter_min_hz = 100
rpm_filter_fade_range_hz = 50
rpm_filter_lpf_hz = 150
flysky_spi_tx_id = 0
flysky_spi_rf_channels = 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0
stats_min_armed_time_s = -1
stats_total_flights = 0
stats_total_time_s = 0
stats_total_dist_m = 0
name = -
display_name = -
position_alt_source = DEFAULT
position_alt_gps_min_sats = 10
position_alt_baro_fallback_sats = 7
box_user_1_name = -
box_user_2_name = -
box_user_3_name = -
box_user_4_name = -
4.2 set parameter_name
# set pinio_box
###WARNING: NO CUSTOM DEFAULTS FOUND###
pinio_box = 40,41,255,255
Array length: 4
Default value: 255,255,255,255
4.3 set parameter_name value
# set pinio_box = 39,40,255,255
pinio_box set to 39,40,255,25
5. 参考资料
【1】BetaFlight开源代码框架简介
【2】BetaFlight统一硬件资源简单配置修改
【3】BetaFlight统一硬件配置文件研读
相关文章:

BetaFlight统一硬件配置文件研读之set命令
BetaFlight统一硬件配置文件研读之set命令 1. 源由2. 代码分析3. 实例分析4. 配置情况4.1 set4.2 set parameter_name4.3 set parameter_name value 5. 参考资料 统一硬件配置文件的设计是一种非常好的设计模式,可以将硬件和软件的工作进行解耦。 1. 源由 cli命令…...

QT+OpenGL高级数据和高级GLSL
QTOpenGL高级数据和高级GLSL 本篇完整工程见gitee:QtOpenGL 对应点的tag,由turbolove提供技术支持,您可以关注博主或者私信博主 高级数据 OpenGL中的缓冲区 对象管理特定的GPU内存 在将缓冲区绑定到特定的缓冲区目标时候赋予它意义 OpenGL在内部会保…...

接口测试之Jmeter+Ant+Jenkins接口自动化测试平台
目录 平台简介 环境准备 Jenkins简介 下载与安装 平台搭建 依赖文件配置 build.xml配置 Ant构建 阿里大佬倾情演绎,3天让你学会Jmeter接口测试,学不会算我输_哔哩哔哩_bilibilihttps://www.bilibili.com/video/BV1Q84y1K7bK/?spm_id_from333.99…...
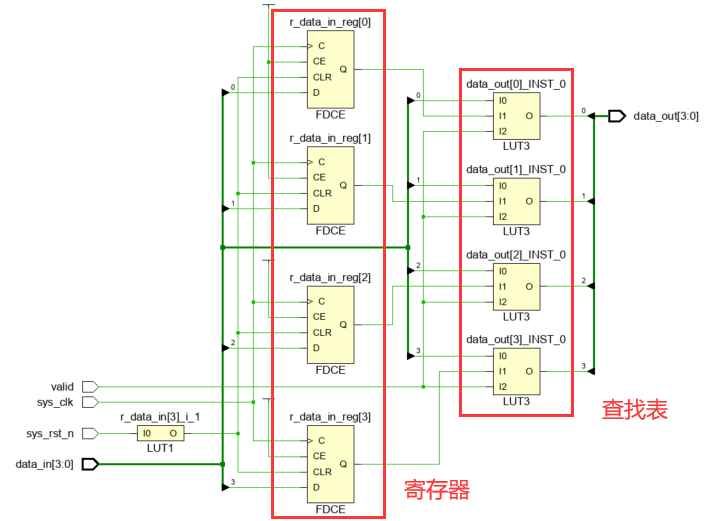
FPGA设计中锁存器产生、避免与消除
FPGA设计中锁存器产生、避免与消除 一、锁存器的产生1.1 组合逻辑中使用保持状态1.2 组合逻辑中的if-else语句或case语句未列出所有可能性1.3 小结 二、锁存器的避免三、锁存器的消除3.1 情况一 一、锁存器的产生 锁存器的产生主要有以下两种情况:(1&…...
一份标准的软件测试方案模板
第一章 概述 软件的错误是不可避免的,所以必须经过严格的测试。通过对本软件的测试,尽可能的发现软件中的错误,借以减少系统内部各模块的逻辑,功能上的缺陷和错误,保证每个单元能正确地实现其预期的功能。检测和排…...
【C++】-对于自定义类型的输入输出运算符重载
💖作者:小树苗渴望变成参天大树 ❤️🩹作者宣言:认真写好每一篇博客 💨作者gitee:gitee 💞作者专栏:C语言,数据结构初阶,Linux,C 文章目录 前言一、案例引入二、<<的重载三、>>的…...
js中什么是宏任务、微任务?宏任务、微任务有哪些?又是怎么执行的?)
(详解)js中什么是宏任务、微任务?宏任务、微任务有哪些?又是怎么执行的?
目录 参考资料 必看强烈建议十分钟看完视频 ,即可学会 必看参考详解宏任务微任务 笔记 宏任务与微任务 定时器的任务编排 promise的微任务处理逻辑 DOM渲染任务 任务队列共享内存 进度条的实现 任务拆分成多个任务 promise复杂任务分割 img算同步还是异步…...

Okta 即代码:云原生时代的身份管理
我们为什么应该将 Okta 配置作为代码进行管理? 对于需要跨多个应用程序和环境管理对其数字资源的访问的组织来说,Okta 可能是最受欢迎的选择,因为它提供了一系列使其在身份验证和授权方面很受欢迎的功能,例如: 单点登…...
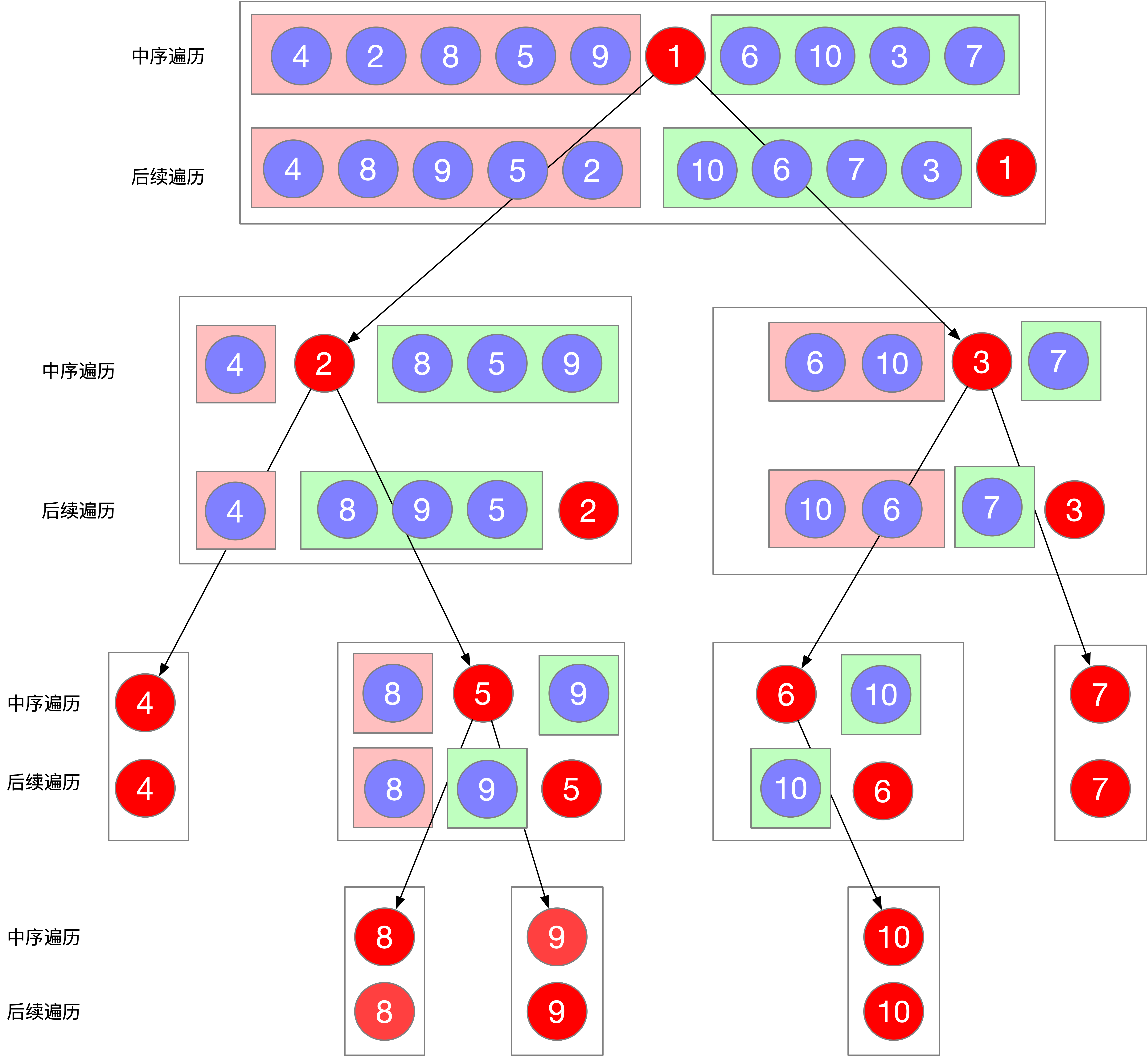
数据结构(六)—— 二叉树(7)构建二叉树
文章目录 如何使用递归构建二叉树1、创建一颗全新树(题1-5)2、在原有的树上新增东西(题6) 1 106 从 后序 与 中序 遍历序列构造二叉树2 105 从 前序 与 中序 遍历序列构造二叉树3 108 将有序数组转换为二叉搜索树(输入…...

安装适用于Linux的Windows11子系统(WSL2)
1. 主板BIOS开启虚拟化 开启虚拟化需要在BIOS中进行设置,进入主板BIOS→找到虚拟化设置→开启。 2. 检验是否开启虚拟化 打开Windows命令行,并运行 systeminfo固件中已启用虚拟化为是,代表主板BIOS已经开启虚拟化。 3. 启用Windows功能…...
使用Spring的五大类注解读取和存储Bean
目录 1.存储Bean对象的注解 1.1 五大类注解 1.2 方法注解 1.3添加注解的依赖 2.注解的使用 2.1 controller注解 2. 2Service注解 2.3.Resopsitory注解 2.4Component注解 2.5Configuration注解 2.6 注解之间的关系 3.方法注解 3.1 方法注解要配合类注解来使用。 3.2…...

Vue3通透教程【十一】初探TypeScript
文章目录 🌟 写在前面🌟 TypeScript是什么?🌟TypeScript 增加了什么?🌟TypeScript 初体验🌟 写在最后🌟 写在前面 专栏介绍: 凉哥作为 Vue 的忠实 粉丝输出过大量的 Vue 文章,应粉丝要求开始更新 Vue3 的相关技术文章,Vue 框架目前的地位大家应该都晓得,所谓…...
Linux环境安装iperf3(网络性能测试工具)
[rootlocalhost ]# yum search iperf 已加载插件:fastestmirror Loading mirror speeds from cached hostfile* base: mirrors.tuna.tsinghua.edu.cn* extras: mirrors.huaweicloud.com* updates: mirrors.tuna.tsinghua.edu.cnN/S matched: iperf iperf3-devel.i6…...

回顾第一章
回顾 Shell脚本中的$虚函数虚函数和纯虚函数 git merge/rebasegit merge特点git rebase特点 Linux内核调试——coredump获取core dump 深度测试和模板测试2D游戏的制作思路C11特性 Shell脚本中的$ $0: 脚本自身的名称; $1: 传入脚本的第一个参数; $2…...
Jupyter Notebook入门教程
Jupyter Notebook(又称Python Notebook)是一个交互式的笔记本,支持运行超过40种编程语言。本文中我们将介绍Jupyter Notebook的主要特点,了解为什么它能成为人们创造优美的可交互式文档和教育资源的一个强大工具。 首先ÿ…...

独立按键识别
项目文件 文件 关于项目的内容知识点可以见专栏单片机原理及应用 的第四章 IO口编写 参考图电路编写程序,要求实现如下功能: 开始时LED均为熄灭状态,随后根据按键动作点亮相应LED(在按键释放后能继续保持该亮灯状态,直至新的按键压下时为止…...

【论文阅读】AlphaFold2阅读笔记
摘要 给一串氨基酸的序列,去预测他的结构是什么样的 蛋白质的折叠问题 alphaFold精度不够 这里可以达到原子精度的预测 CASP14 精度 这个是什么问题是不是解决了问题 模型的结果并不重要 导论 摘要故事的详细版本 在写论文的时候,可以这样写&a…...

机器学习基础知识之数据归一化
文章目录 归一化的原因1、最大最小归一化2、Z-score标准化3、不同方法的应用 归一化的原因 在进行机器学习训练时,通常一个数据集中包含多个不同的特征,例如在土壤重金属数据集中,每一个样本代表一个采样点,其包含的特征有经度、…...

QCC51XX---pydbg_cmd集合
目录 common pydbg_cmd headset pydbg_cmd earbud pydbg_cmd common pydbg_cmd log apps1.log_level() apps1.fw.gbl.debug_log_level__global 查看log等级apps1.fw.gbl.debug_log_level__global.value = 5 设置log等级 apps1.log()...

camx 马达的MSM_ACTUATOR_WRITE_DAC 操作
camx 马达的MSM_ACTUATOR_WRITE_DAC操作 为什么要分析 MSM_ACTUATOR_WRITE_DACmm-camera MSM_ACTUATOR_WRITE_DACcamx MSM_ACTUATOR_WRITE_DAC总结 为什么要分析 MSM_ACTUATOR_WRITE_DAC 目前的camx源码 省略了hw_mask 的处理。 一般来说 hw_mask 是0 ,但是对于非0…...
)
8088单板机DIY--串口转换(一)
1.USB转232电路2.功能测试打开设备管理器,可以看到新增的串口。3.通讯测试短接发送和接收,进行自发自收测试。...

五分钟用Python为嵌入式应用接入Taotoken大模型服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 五分钟用Python为嵌入式应用接入Taotoken大模型服务 为嵌入式设备或物联网项目添加智能对话能力,可以极大地提升产品的…...

FreeMove:Windows系统磁盘空间智能优化解决方案
FreeMove:Windows系统磁盘空间智能优化解决方案 【免费下载链接】FreeMove Move directories without breaking shortcuts or installations 项目地址: https://gitcode.com/gh_mirrors/fr/FreeMove 当C盘空间告急时,大多数Windows用户面临着一个…...

Blender 3MF插件:从设计到打印的无缝桥梁 [特殊字符]
Blender 3MF插件:从设计到打印的无缝桥梁 🚀 【免费下载链接】Blender3mfFormat Blender add-on to import/export 3MF files 项目地址: https://gitcode.com/gh_mirrors/bl/Blender3mfFormat 还在为3D模型在不同软件间转换而烦恼吗?B…...

国际B2B企业平台表达框架:IBM式重构与ServiceNow式统一执行
如果把国际B2B品牌表达看成一个系统问题,IBM / ServiceNow这组样本可以拆成一套判断框架。它不是讨论文案怎么写,而是讨论输入什么业务条件,输出什么品牌角色、结构和证据链。框架结论:IBM与ServiceNow都服务企业转型,…...

书匠策AI:你的毕业论文“外挂“已上线,看完这篇你就懂了
各位同学们,我是你们的论文科普老朋友。 今天不讲格式、不讲开题报告怎么凑字数,咱们来聊一个能让你从"头秃"变成"头不秃"的神奇工具——书匠策AI。没错,就是那个官网 官网直达:www.shujiangce.com上让无数毕…...

图灵完备8051 第三天 累加器A和寄存器B
如果EN_B1,则写入新数据,否则保持原状。EN_B_OUT1,则输出,否则高阻态A也一样...

Fast-GitHub:国内开发者必备的GitHub下载加速终极方案
Fast-GitHub:国内开发者必备的GitHub下载加速终极方案 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 对于身处国内的开…...

DuckyClaw工具链解析:智能家居硬件安全与固件提取实战
1. 项目概述:从“DuckyClaw”看智能家居的硬件安全研究最近在翻看一些开源硬件项目时,一个名为“DuckyClaw”的仓库引起了我的注意。这个项目托管在涂鸦智能(Tuya)的官方GitHub组织下,名字本身就很有意思——“鸭子爪”…...
)
PyTorch/TensorFlow深度学习环境搭建:在Windows10上一步到位搞定CUDA和cuDNN(避坑合集)
PyTorch/TensorFlow深度学习环境搭建:在Windows10上一步到位搞定CUDA和cuDNN(避坑合集) 刚入坑深度学习的开发者,最头疼的莫过于环境配置。明明按照教程一步步安装了PyTorch或TensorFlow,却在代码运行时看到CUDA不可用…...