【Ubuntu18.04使用yolov5教程】
- 欢迎大家阅读2345VOR的博客【Ubuntu18.04使用yolov5教程】🥳🥳🥳
- 2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空🛹🛹🛹
- 本文章属于《Ubuntu学习》和《ROS机器人学习》
:这里主要是记录Ubuntu下简单使用yolov5测试检测效果的过程,我是使用realsense d435i摄像头的RGB图像。👍👍👍

1. 前言
Ubuntu环境搭建
【经典Ubuntu20.04版本U盘安装双系统教程】
【Windows10安装或重装ubuntu18.04双系统教程】
【Ubuntu同步系统时间】
【Ubuntu中截图工具】
【Ubuntu安装QQ】
【Ubuntu安装后基本配置】
【Ubuntu启动菜单的默认项】
【ubuntu系统中修改hosts配置】
【18.04Ubuntu中解决无法识别显示屏】
【ROS 开发神器 Visual Studio Code 的安装和设置】
【基于Ubuntu18.04+Melodic的realsense D435安装】
【Ubuntu18配置Anaconda深度学习环境】
ROS学习笔记
【1. Ubuntu18.04安装ROS Melodic】
【2. 在Github上寻找安装ROS软件包】
【3. 初学ROS,年轻人的第一个Node节点】
【4. ROS的主要通讯方式:Topic话题与Message消息】
【5. ROS机器人的运动控制】
【6. 激光雷达接入ROS】
【7. ROS 中的 IMU 惯性测量单元消息包】
我在Ubuntu下配置深度环境的过程可参考:
【Ubuntu18配置Anaconda深度学习环境】
本篇文章主要参考:
Ubuntu下使用yolov5
https://github.com/ultralytics/yolov5
这里参考的github上的yolo v5程序版本和功能比较全面,图片、视频、摄像头实时画面都可以使用,可以以这个程序为基础进行修改。
2. yolov5源码配置
源码地址; https://github.com/ultralytics/yolov5

2.1 下载文件
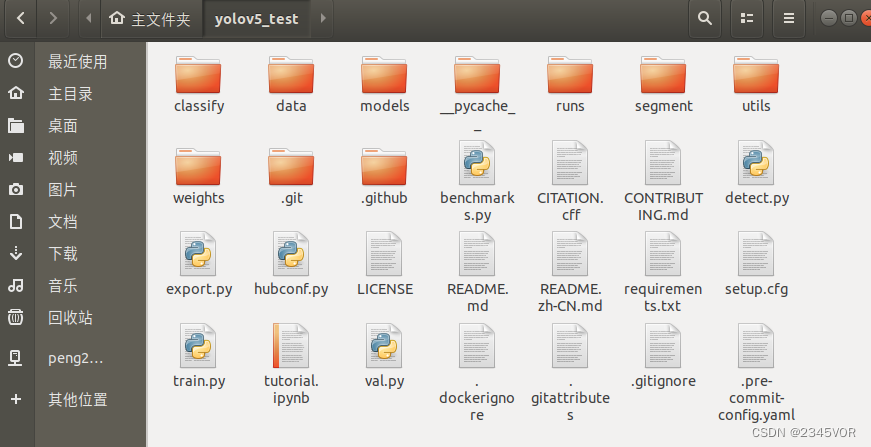
首先使用CTRL+alt+t命令下载文件到~/yolov5_test文件夹下,然后准备开始VScode配置和安装相关依赖
git clone https://github.com/ultralytics/yolov5.git yolov5_test主目录如下文件
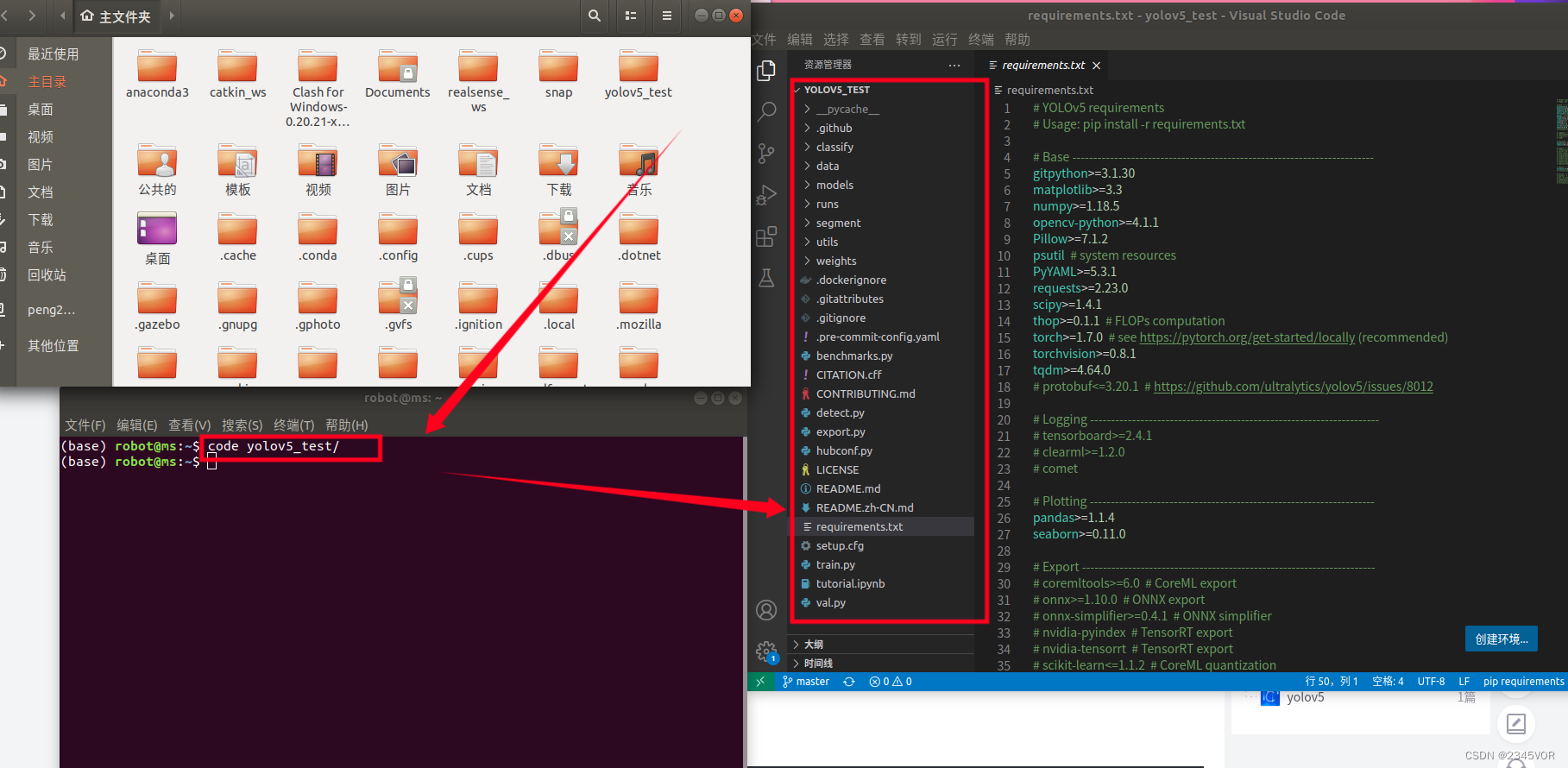
2.2 用VScode打开
进入主目录,打开终端输入code yolo,tab 回车用vscode打开,vscode可参考
【ROS 开发神器 Visual Studio Code 的安装和设置】
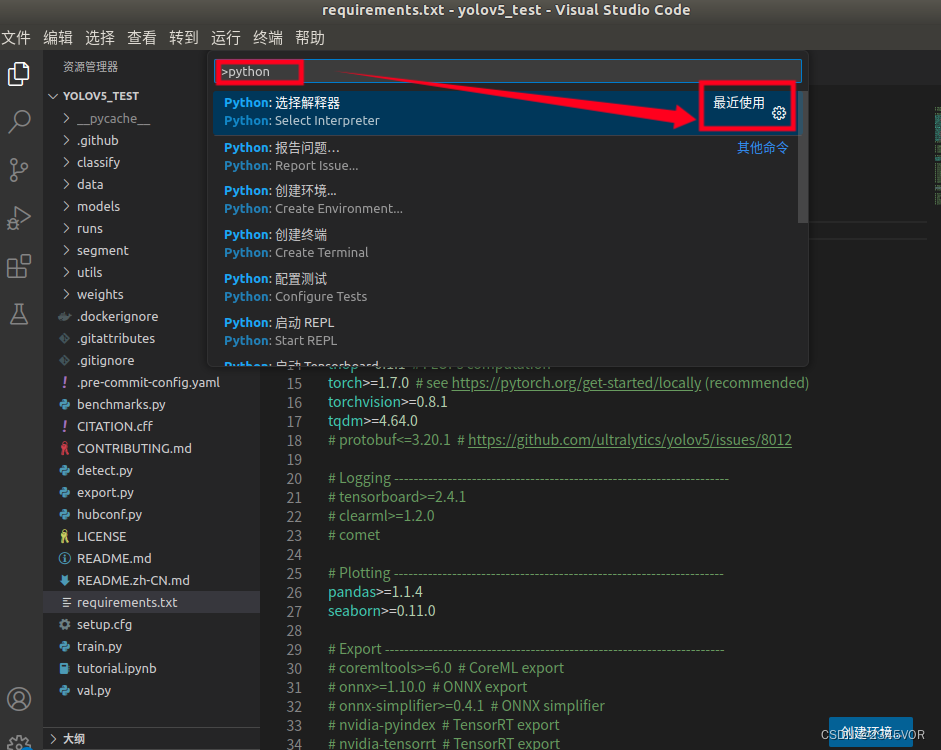
首先使用CTRL+shift+p命令: 打开命令交互面板, 在命令面板中可以输入命令进行搜索(中英文都可以),然后执行。命名面板中可以执行各种命令,包括编辑器自带的功能和插件提供的功能
在打开的命令面板中输入下述命令,如下图所示:
Python: Select Interpreter
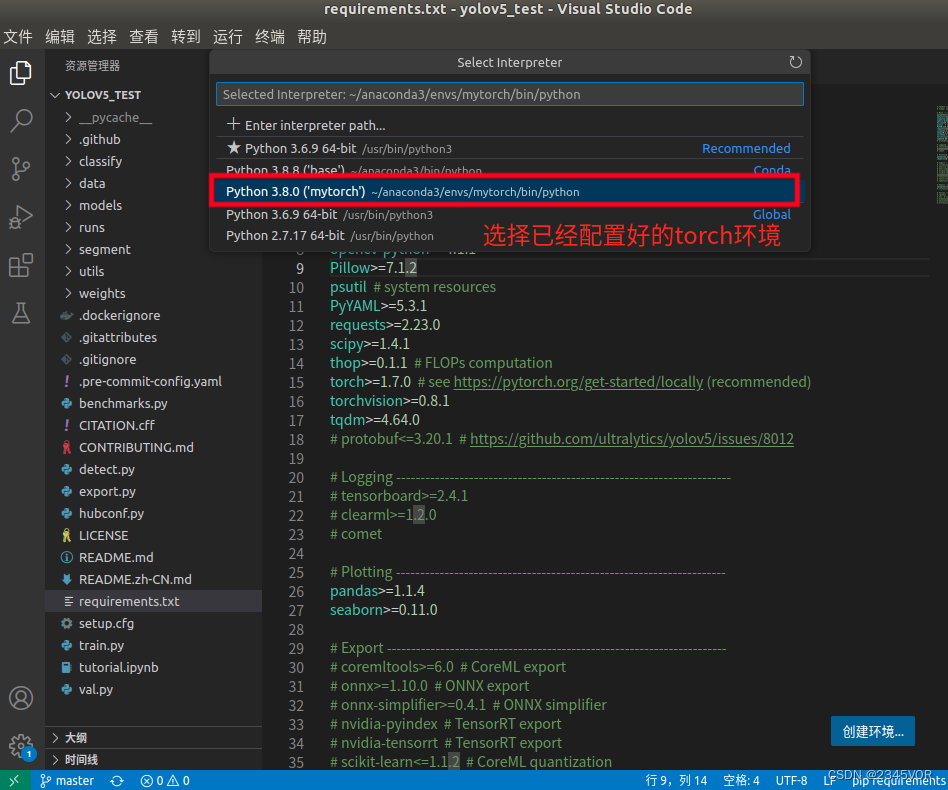
 选择已经配置好的torch环境,可参考
选择已经配置好的torch环境,可参考
【Ubuntu18配置Anaconda深度学习环境】
然后ctrl+shift+`
打开终端
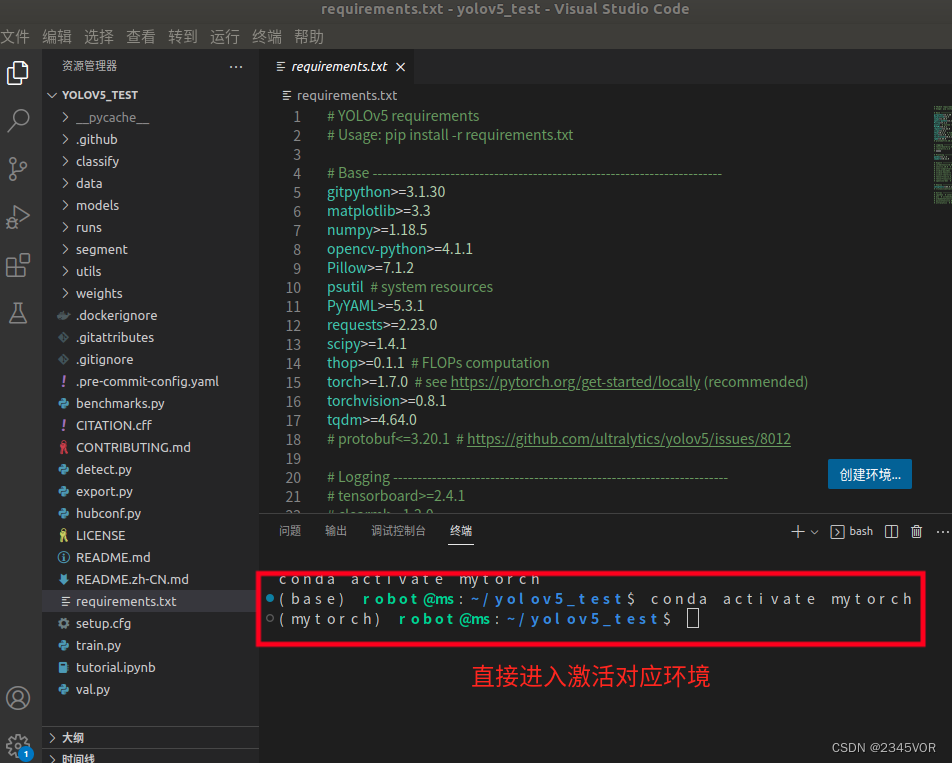 期待下面的操作啦!
期待下面的操作啦!
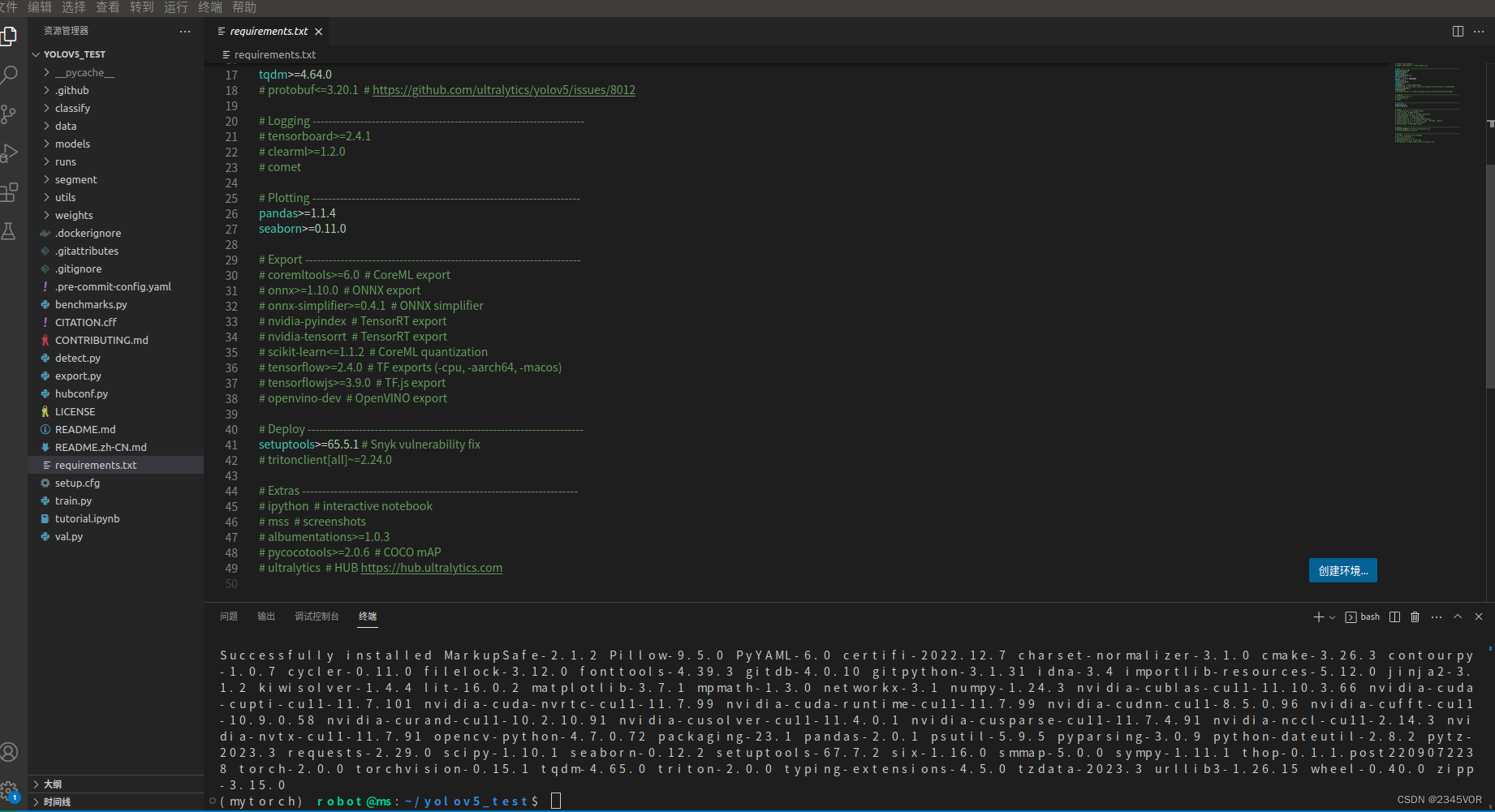
2.3 安装相关依赖
接着上面的操作,在终端中输入下面指令,下载相关依赖。如下是添加了清华镜像,下载速度比国外源快。
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple --ignore-installed
一定要完全安装,需要下载好几个G的文件包,否则后面实验会报乱七八糟的错误。反馈如下
3. 运行detect例子
3.1 语法说明
详细的可以参考https://github.com/ultralytics/yolov5中的README.md
- source:是选择测试例的来源
$ python detect.py --source 0 # webcamimg.jpg # imagevid.mp4 # videopath/ # directorypath/*.jpg # glob'https://youtu.be/Zgi9g1ksQHc' # YouTube'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
- weights:是选择模型,如果weights文件夹里有权重则直接使用,没有就下载,PyTorch框架的权重文件后缀为.pt,,也可等运行时自动下载
# weights: yolov5m, yolov5l, yolov5x, custom
python3 detect.py --source ./data/images/ --weights weights/yolov5s.pt
3.2 测试图片
图片在/data/images文件下,分别是如下两张


在终端输入如下
clear
python3 detect.py --source ./data/images/ --weights weights/yolov5s.pt
效果:
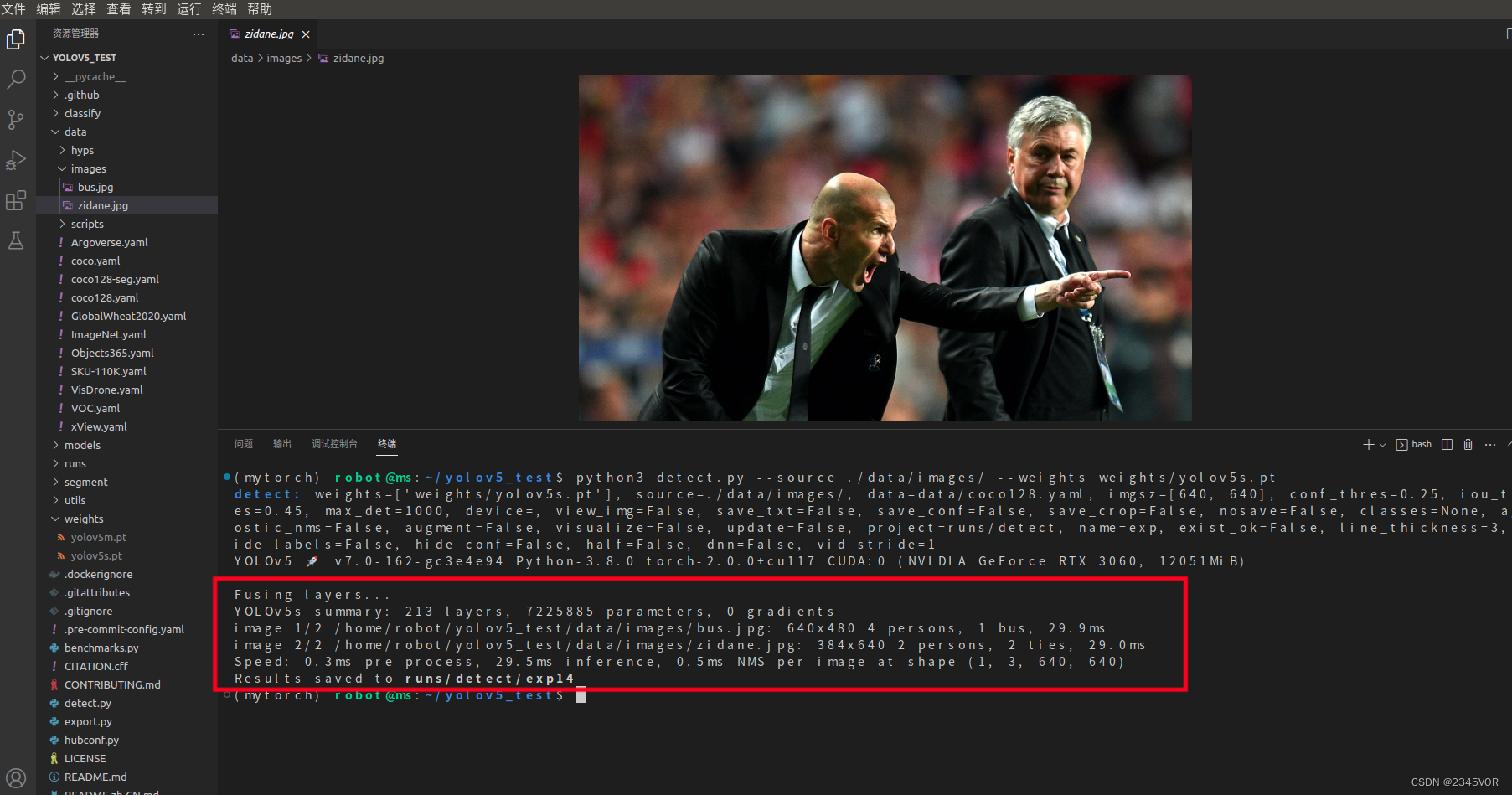
(mytorch) robot@ms:~/yolov5_test$ python3 detect.py --source ./data/images/ --weights weights/yolov5s.pt
detect: weights=['weights/yolov5s.pt'], source=./data/images/, data=data/coco128.yaml, imgsz=[640, 640], conf_thres=0.25, iou_thres=0.45, max_det=1000, device=, view_img=False, save_txt=False, save_conf=False, save_crop=False, nosave=False, classes=None, agnostic_nms=False, augment=False, visualize=False, update=False, project=runs/detect, name=exp, exist_ok=False, line_thickness=3, hide_labels=False, hide_conf=False, half=False, dnn=False, vid_stride=1
YOLOv5 🚀 v7.0-162-gc3e4e94 Python-3.8.0 torch-2.0.0+cu117 CUDA:0 (NVIDIA GeForce RTX 3060, 12051MiB)Fusing layers...
YOLOv5s summary: 213 layers, 7225885 parameters, 0 gradients
image 1/2 /home/robot/yolov5_test/data/images/bus.jpg: 640x480 4 persons, 1 bus, 29.9ms
image 2/2 /home/robot/yolov5_test/data/images/zidane.jpg: 384x640 2 persons, 2 ties, 29.0ms
Speed: 0.3ms pre-process, 29.5ms inference, 0.5ms NMS per image at shape (1, 3, 640, 640)
Results saved to runs/detect/exp14
检测出图片内容如下,效果还不错,一张0.03秒,基本都识别出来了。
image 1/2 /home/robot/yolov5_test/data/images/bus.jpg: 640x480 4 persons, 1 bus, 29.9ms
image 2/2 /home/robot/yolov5_test/data/images/zidane.jpg: 384x640 2 persons, 2 ties, 29.0ms
Speed: 0.3ms pre-process, 29.5ms inference, 0.5ms NMS per image at shape (1, 3, 640, 640)
3.3 测试RealSense摄像头实时图像
RealSense摄像头可以采用以下教程配置,主要调用SDK
的图像配置。
【基于Ubuntu18.04+Melodic的realsense D435安装】
在上面终端输入如下,首先查看USB占用情况
lsusb

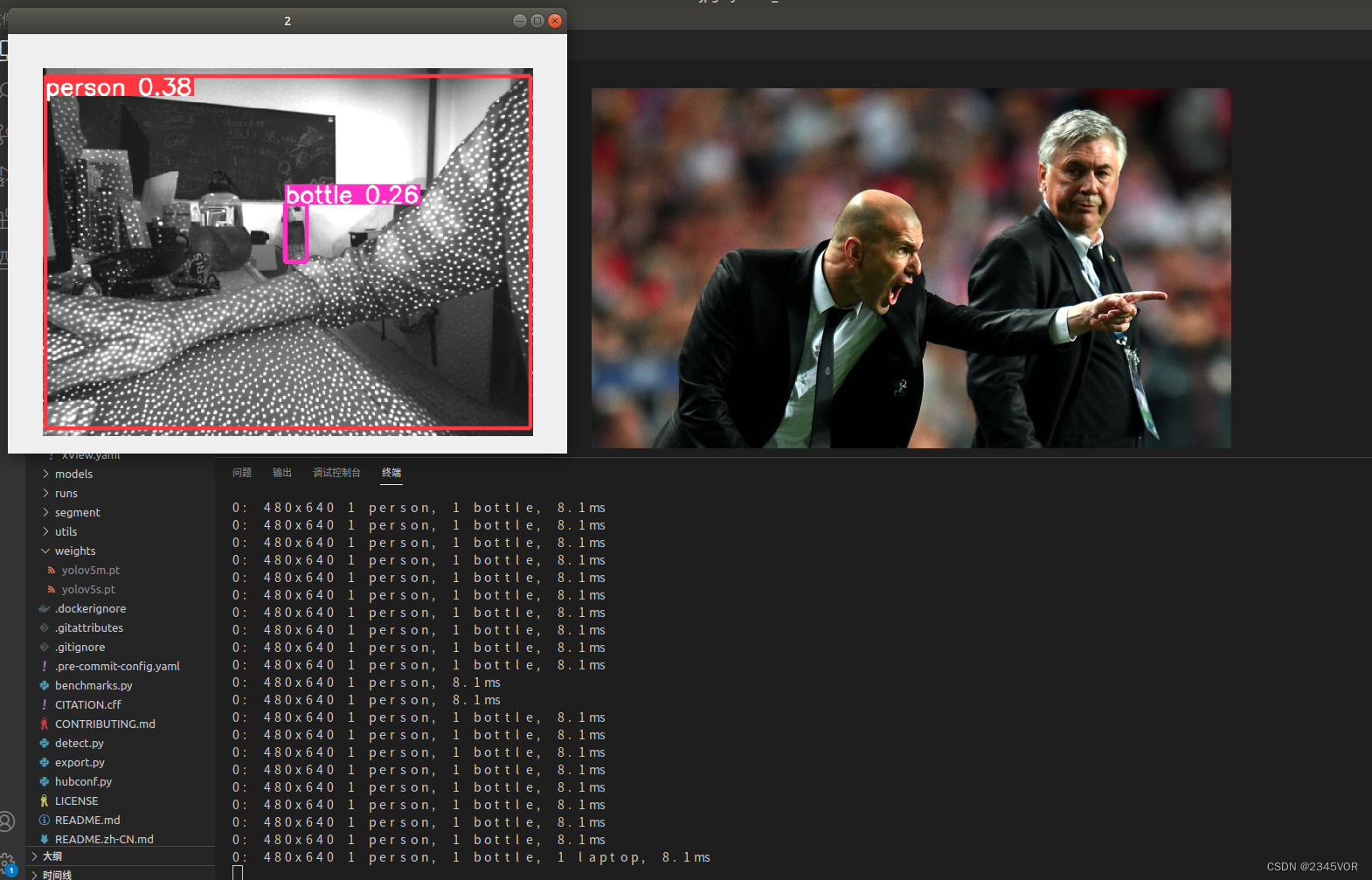
- 红外画面测试及效果
在上面终端输入如下,红外画面测试
python3 detect.py --source 2 --weights weights/yolov5m.pt
效果
ctrl+c中止当前终端任务
- RGB画面测试及效果
在上面终端输入如下,RGB画面测试
python3 detect.py --source 4 --weights weights/yolov5m.pt
效果
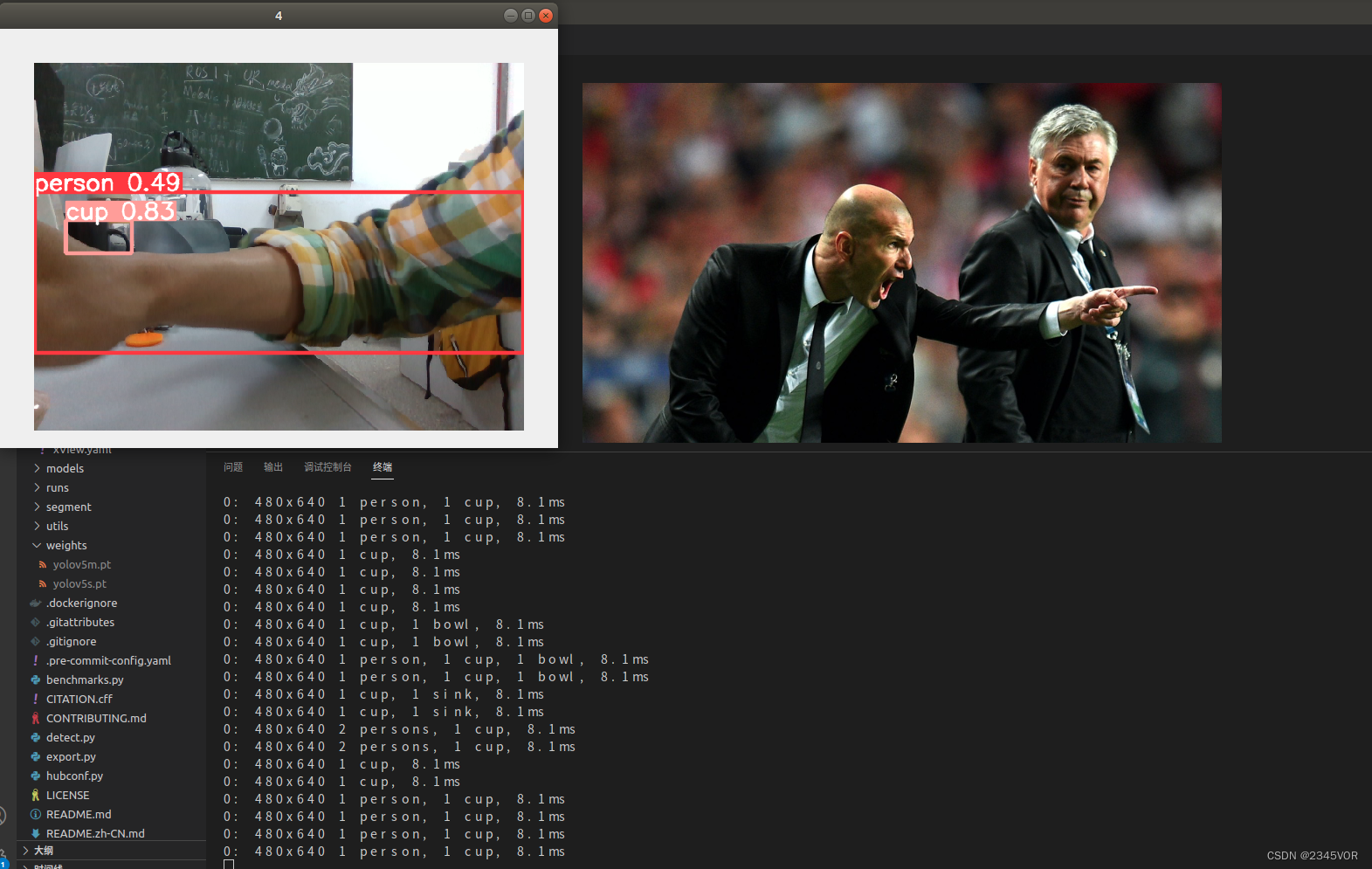
注意事项:
- 对于深度相机,不能像普通的usb相机一样,opencv打开id直接为0。
- 对于id为2时打开的是红外的画面,id为4打开的是RBG画面。
相关文章:
【Ubuntu18.04使用yolov5教程】
欢迎大家阅读2345VOR的博客【Ubuntu18.04使用yolov5教程】🥳🥳🥳2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空…...

CocoaPods如何发布新版本的Pod Library
当我们修改了一个Pod Library中的代码时,如何让依赖该库的项目能更新到最新代码,步骤如下: 假设现在修改了SamplePod(Pod名称)的代码,希望将最新版本更新到1.0.1,目前版本是1.0.0 修改SamplePo…...
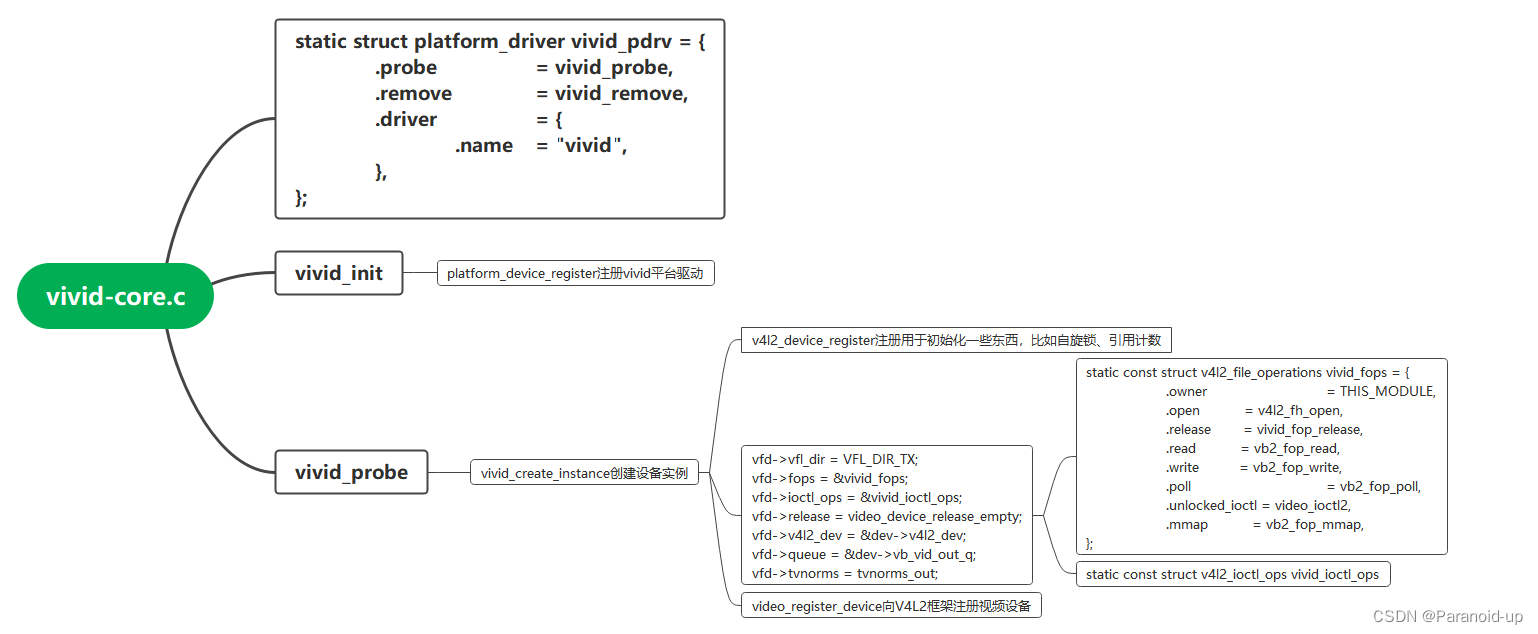
v4l2框架
v4l2框架 文章目录 v4l2框架框架1.硬件相关层uvc_probeuvc_register_chainsuvc_register_termsuvc_register_video 2.核心层__video_register_device 3.虚拟视频驱动vivid分析入口vivid_init注册vivid平台驱动vivid_probevivid_create_instance 框架 1.硬件相关层 driver/medi…...

vue项目中生成LICENSE文件
vue项目中生成LICENSE文件 简介 LICENSE 文件是一个文本文件,它包含了你的项目所使用的开源软件的许可证信息。 在开发过程中,我们经常会使用到各种各样的第三方开源软件,这些软件是有版权和许可证的,我们在使用时需要遵循它们的…...

NewBing最新更新使用体验(无需等待人人可用)
NewBing最新更新使用体验 微软Bing爆炸级更新!无需等待人人可用! 今天,微软突然官宣全面开放BingChat: 无需任何等待。只需注册一个账户,首页即可体验。 NewBing最新更新新特性官方文档 https://www.microsoft.com/en-…...

欧拉奔赴品牌2.0时代,女性汽车真实用户需求被定义?
每年的上海国际汽车工业展览会,不仅是各大汽车品牌的技术“秀场”,也是品牌的营销“修罗场”。今年上海车展出圈的营销事件特别多,热度甚至一再蔓延到汽车行业外,其中欧拉也贡献了不少流量。 据了解,在2023上海车展欧…...

机器视觉工程师,听我一句劝,别去外包,干了三年,废了....对女人没了兴趣
外包三年,干了就废,最后只会安装软件。 对于年轻人来说,需要工作,更需要生活。 对于年轻人来说,需要努力,更需要“面包”。 对于年轻人来说,需要规划,更需要发展。 对于外包,虽说废的不是很彻底,但那三年几乎是出差了三年、玩了三年、荒废了三年,那三年,技术…...
)
PBDB Data Service:Special parameters(特殊参数)
Special parameters(特殊参数) 描述参数1:下列参数在大部分请求中可用2:以下参数只与文本格式(.csv, .tsv, .txt)相关 描述 本文将介绍一组特殊参数,它们几乎可以在此数据服务的任何请求中使用…...
腾讯云轻量应用服务器使用限制说明(十大限制)
腾讯云轻量应用服务器和云服务器CVM相比具有一些限制,比如轻量服务器不支持更换内网IP地址,轻量服务器只能套餐整体升级且不支持降配,轻量不支持用户自定义配置私有网络VPC,还有如实例配额、云硬盘配额、备案限制和内网连通性等限…...

Python每日一练(20230507) 丑数I\II\III、超级丑数
目录 1. 丑数 Ugly Number I 2. 丑数 Ugly Number II 3. 丑数 Ugly Number III 4. 超级丑数 Super Ugly Number 🌟 每日一练刷题专栏 🌟 Golang每日一练 专栏 Python每日一练 专栏 C/C每日一练 专栏 Java每日一练 专栏 1. 丑数 Ugly Number I …...

K8S常见异常事件与解决方案
集群相关 Coredns容器或local-dns容器重启 集群中的coredns组件发生重启(重新创建),一般是由于coredns组件压力较大导致oom,请检查业务是否异常,是否存在应用容器无法解析域名的异常。 如果是local-dns重启,说明local-dns的性能…...
测试5年从中兴 15K 跳槽去腾讯 32K+16,啃完这份笔记你也可以
粉丝小王转行做测试已经是第5个年头,一直是一个不温不火的小职员,本本分分做着自己的事情,觉得自己的工作已经遇到了瓶颈,一个偶然的机会,获得了一份软件测试全栈知识点学习笔记,通过几个月的学习ÿ…...

CentOS 临时IP与永久IP配置
CentOS 临时IP与永久IP配置 CentOS是一种广泛使用的Linux发行版,通常用于服务器和企业网络中。在安装和配置CentOS服务器时,必须为其配置IP地址以便访问。在本文中,我们将介绍如何在CentOS中配置临时IP地址和永久IP地址。 临时IP地址配置 临…...

集线器、网桥、交换机
一.集线器 集线器(HUB),它是工作在物理层的设备, 由于它只是工作在物理层的设备,所以它并不关心也不可能关心OSI上面几层所涉及的,它的工作机制流程是:从一个端口接收到数据包时,会在…...

api接口怎么用?
API接口是一种应用程序编程接口,它允许不同的软件应用程序之间进行通信和交互。通过使用API接口,开发人员可以轻松地将自己的应用程序集成到其他应用程序中,从而实现更丰富的功能和更好的用户体验。 API接口的使用方法一般包括以下几个步骤&a…...

Bad minute in crontab?
ERROR 详细 修改crontab出现如下错误: crontab: installing new crontab “/tmp/crontab.MswKCq”:0: bad minute errors in crontab file, can’t install. Do you want to retry the same edit? n crontab: edits left in /tmp/crontab.MswKCq 根因定位 通过…...
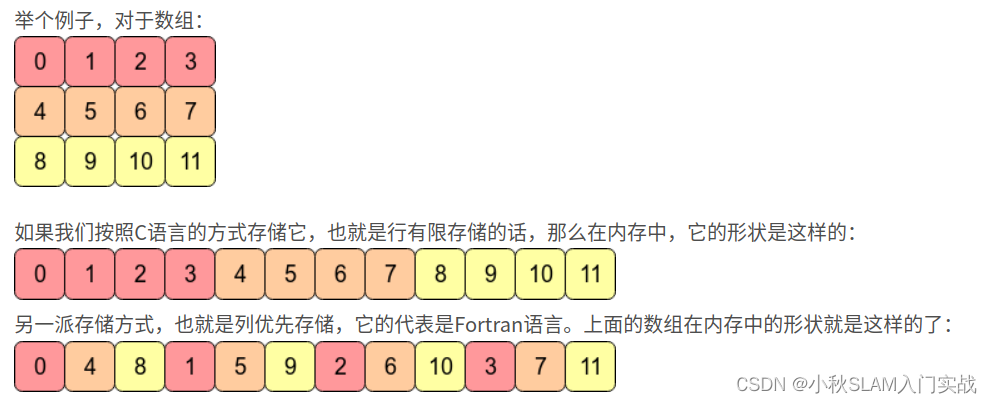
【二维矩阵如何存储在一维数组中(行优先和列优先)】
列优先和行优先的性能取决于具体的硬件架构和代码访问模式。在现代计算机中,内存访问的局部性(locality of reference)对性能至关重要。局部性分为两类:时间局部性(temporal locality)和空间局部性(spatial locality)。时间局部性表示最近访问过的数据项很可能在不久的…...
使用Gradle7.6+SpringBoot 3.0+java17创建微服务项目
系列文章目录 学习新版本,菜鸟一枚 会持续更新的 文章目录 系列文章目录前言一、搭建项目1.1、创建git仓库1.1.1、登录gitee,新建仓库1.1.2、得到如下命令(新建仓库使用创建git仓库 即可) 1.2、使用IDEA创建项目1.2.1、开发工具1.…...
pandas使用教程:apply函数、聚合函数agg和transform
文章目录 apply函数调用apply函数描述性统计apply函数lambda自定义 聚合函数aggregate/agg用字典实现聚合 transform函数多函数 Transform 重置索引与更换标签行重置索引行和列同时重置索引 apply函数调用 apply函数描述性统计 import numpy as np df.loc[:,Q1:Q4].apply(np.…...

使用rasterio裁剪遥感影像
文章目录 0. 数据准备1. polygon的坐标系转换1.1 polygon生成1.1.1 输入数据是shapefile1.1.2 输入数据是polygon 1.2 搞清楚遥感的坐标系和polygon的坐标系(重点)1.3 开始转换 2. 基于polygon的遥感影像裁剪2.1 基础裁剪方法2.1.1 使用rasterio保存2.1.2 使用numpy保存2.2 多线…...

手把手教你配置i.MX RT1052的BOOT引脚:从HyperFlash到QSPI的启动选择实战
手把手教你配置i.MX RT1052的BOOT引脚:从HyperFlash到QSPI的启动选择实战 在嵌入式系统开发中,启动配置是硬件工程师和开发者面临的第一个关键挑战。i.MX RT1052作为一款高性能跨界处理器,其灵活的启动选项既带来了强大的适应性,也…...

从AgentKit看AI应用工程化:架构演进与可靠性设计
1. 项目概述:一个已归档的AI应用快速启动器如果你在2023年到2024年初关注过AI应用开发,特别是基于大语言模型(LLM)的智能体(Agent)构建,那么你很可能听说过或者尝试过AgentKit。这个由BCG X&…...

设计程序统计行业淡季旺季,职场工作量数据,合理调配人力,解决忙闲不均,人力资源浪费职场现状。
一、实际应用场景描述在许多行业(如零售、旅游、物流、电商、教育培训等)中,普遍存在明显的季节性波动:- 旺季:订单/任务激增,员工超负荷加班- 淡季:业务量骤减,人员闲置、工时不足-…...

GPT-4 Turbo访问权、优先响应、高级数据分析——ChatGPT Plus五大隐藏权益深度拆解,92%用户根本没用全
更多请点击: https://intelliparadigm.com 第一章:ChatGPT Plus订阅值不值得买 ChatGPT Plus 提供每月 $20 的固定订阅服务,主打 GPT-4 模型访问、优先响应队列、文件上传解析(PDF/CSV/TXT 等)及自定义 GPTs 功能。是…...

从零打造你的AI图像放大神器:waifu2x-caffe完全指南
从零打造你的AI图像放大神器:waifu2x-caffe完全指南 【免费下载链接】waifu2x-caffe waifu2xのCaffe版 项目地址: https://gitcode.com/gh_mirrors/wa/waifu2x-caffe 想象一下,你珍藏多年的动漫壁纸分辨率太低,无法作为4K显示器背景&a…...

3分钟快速上手:Sonar CNES Report代码质量报告生成完整指南
3分钟快速上手:Sonar CNES Report代码质量报告生成完整指南 【免费下载链接】sonar-cnes-report Generates analysis reports from SonarQube web API. 项目地址: https://gitcode.com/gh_mirrors/so/sonar-cnes-report Sonar CNES Report 是一个强大的开源工…...

观察Taotoken在多模型并发请求下的稳定性与响应表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察Taotoken在多模型并发请求下的稳定性与响应表现 在实际业务开发中,我们常常需要同时调用多个不同的大模型来处理不…...

6.1B激活,三榜开源第一!蚂蚁·安诊儿医疗大模型发布
刚刚,由浙江省卫生健康信息中心、蚂蚁健康与浙江省安诊儿医学人工智能科技有限公司联合研发,迄今为止规模最大、能力最强的开源医疗语言模型 AntAngelMed 发布并开源。模型基于 Ling-flash-2.0,MoE架构,100B 总参数仅激活 6.1B 即…...

JD-GUI深度解析:Java字节码逆向工程的瑞士军刀
JD-GUI深度解析:Java字节码逆向工程的瑞士军刀 【免费下载链接】jd-gui A standalone Java Decompiler GUI 项目地址: https://gitcode.com/gh_mirrors/jd/jd-gui 在Java开发的世界里,我们常常需要面对只有字节码没有源码的困境——第三方库的调试…...

基于PM波谱的二级海浪三维数值建模与可视化仿真
摘要:海浪的数值建模与三维可视化仿真在海洋工程、船舶设计及海上作业安全评估等领域具有重要的应用价值。针对二级海况(有义波高约 1.0 m、风速约7 m/s)条件下的不规则海浪模拟需求,本文提出了一种基于Pierson-Moskowitz…...