ROS笔记(4)——发布者Publisher与订阅者Subscribe的编程实现
发布者
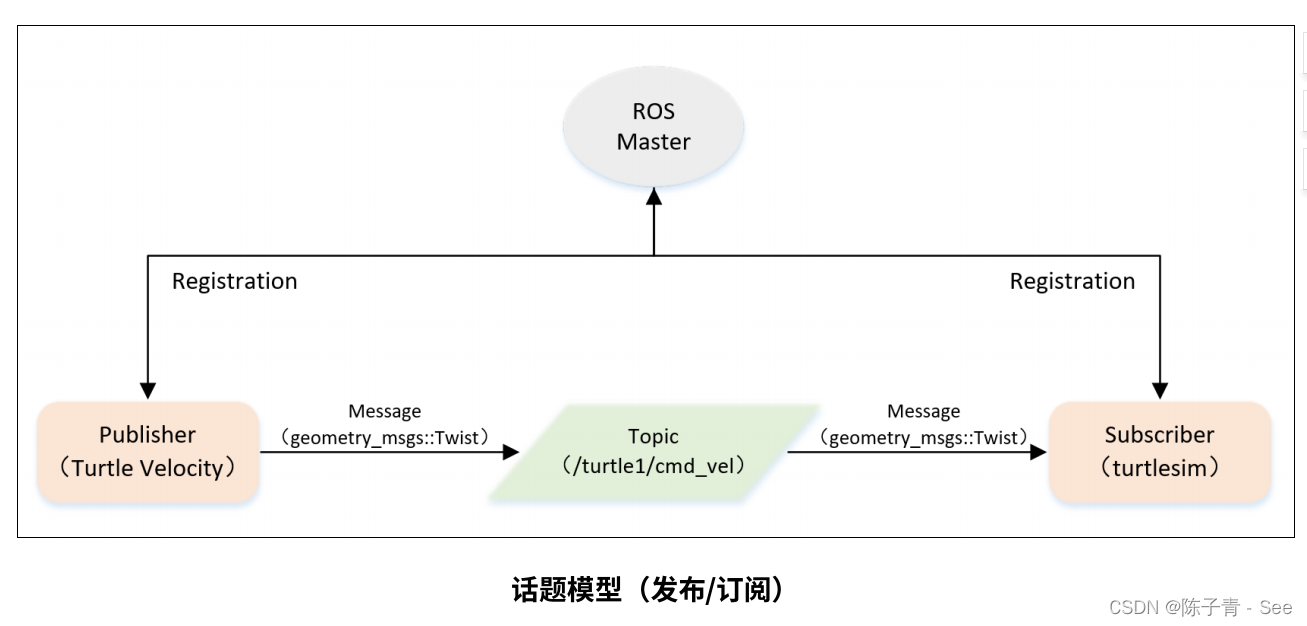
以小海龟的话题消息为例,编程实现发布者通过/turtle1/cmd_vel 话题向 turtlesim节点发送消息,流程如图
步骤一 创建功能包(工作空间为~/catkin_ws/src)
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
步骤二 编写C++代码,如下
#include<ros/ros.h>
#include<geometry_msgs/Twist.h>int main(int argc, char*argv[])
{/* 初始化ros节点 */ros::init(argc,argv,"velovity_publisher");//创建节点句柄ros::NodeHandle n;//创建一个Publisher,发布名为turtle1/cmd_vel 的topic,消息类型为 geometry_msgs ::Twist.h 队列长度为10 ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("turtle1/cmd_vel",10);ros::Rate loop_rate(10);while(ros::ok()){//初始化消息geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0.5;vel_msg.angular.z = 0.2;//发布消息turtle_vel_pub.publish(vel_msg);//打印日志ROS_INFO("velocity_publisher : msg [%0.2f m/s,%0.2f rad/s]",vel_msg.linear.x,vel_msg.angular.z);loop_rate.sleep();}return 0;
}补充项:使用vscode编写C++代码,ROS的头文件引用问题
解决方案如下:
打开您的VS Code项目或工作空间。
在菜单栏中,选择“查看”(View) -> “命令面板”(Command Palette)。
在搜索框中输入“C++: Edit Configuration”,并选择“C++: Edit Configurations (UI)”选项。
在这个UI界面中,您需要添加以下两个路径:
在“编译”(Compile)标签页下,选择“高级”(Advanced)选项。
在“includePath”中添加ROS的include文件夹的路径,如
/opt/ros/<ROS_VERSION>/include。在“browse.path”中添加ROS的lib文件夹的路径,如
/opt/ros/<ROS_VERSION>/lib。单击“确定”(OK)保存您的更改。
步骤三 配置CMakeLists.txt
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
步骤四 编译运行
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
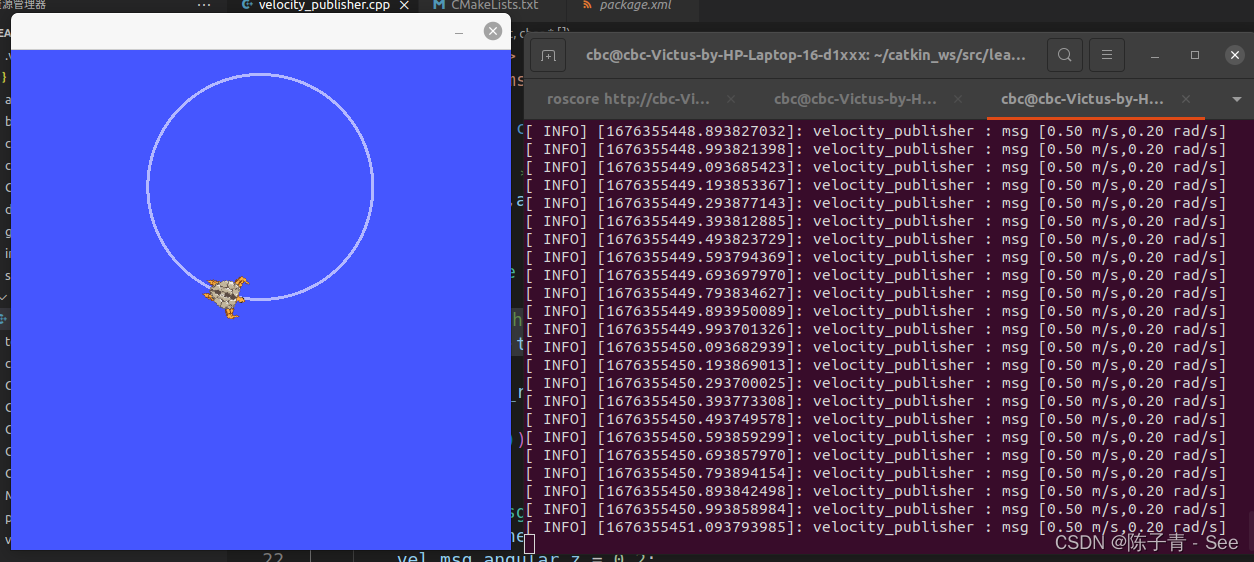
$ rosrun learning_topic velocity_publisher
此时,小海龟接受到消息作圆周运动。
订阅者
订阅者编译与运行方式同上,以订阅/turtle1/pose topic 获取小海龟坐标为例,代码如下
#include<ros/ros.h>
#include"turtlesim/Pose.h"void poseCallback(const turtlesim::Pose::ConstPtr &msg)
{ROS_INFO("pose:x %0.6f, y %0.6f",msg->x,msg->y);
}int main(int argc, char *argv[])
{/* code *///初始化ros节点ros::init(argc,argv,"pose_subscriber");//创建节点句柄ros::NodeHandle n;//创建一个订阅者,订阅名为 /turtle1/pose 的 topic ros::Subscriber pose_sub =n.subscribe("/turtle1/pose",10,poseCallback);//阻塞ros::spin();return 0;
}附录:roscpp C++官方文档 roscpp: roscpp
rospy Python官网文档 http://docs.ros.org/en/melodic/api/rospy/html/
python对应写法
发布者
# 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twistimport rospy
from geometry_msgs.msg import Twistdef velocity_publisher():# ROS节点初始化rospy.init_node('velocity_publisher', anonymous=True)# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)#设置循环的频率rate = rospy.Rate(10) while not rospy.is_shutdown():# 初始化geometry_msgs::Twist类型的消息vel_msg = Twist()vel_msg.linear.x = 0.5vel_msg.angular.z = 0.2# 发布消息turtle_vel_pub.publish(vel_msg)rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]", vel_msg.linear.x, vel_msg.angular.z)# 按照循环频率延时rate.sleep()if __name__ == '__main__':try:velocity_publisher()except rospy.ROSInterruptException:pass订阅者
# 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Poseimport rospy
from turtlesim.msg import Posedef poseCallback(msg):rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)def pose_subscriber():# ROS节点初始化rospy.init_node('pose_subscriber', anonymous=True)# 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallbackrospy.Subscriber("/turtle1/pose", Pose, poseCallback)# 循环等待回调函数rospy.spin()if __name__ == '__main__':pose_subscriber()
相关文章:
ROS笔记(4)——发布者Publisher与订阅者Subscribe的编程实现
发布者 以小海龟的话题消息为例,编程实现发布者通过/turtle1/cmd_vel 话题向 turtlesim节点发送消息,流程如图 步骤一 创建功能包(工作空间为~/catkin_ws/src) $ cd ~/catkin_ws/src $ catkin_create_pkg learning_topic roscpp rospy s…...
Linux进程概念(一)
文章目录Linux进程概念(一)1. 冯诺依曼体系结构2. 操作系统(Operator System)2.1 考虑2.2 如何理解操作系统对硬件做管理?2.3 操作系统为什么要对软硬件资源做管理呢?2.4 系统调用和库函数概念2.5 计算机体系结构3. 进程的初步理解…...
Leetcode.1124 表现良好的最长时间段
题目链接 Leetcode.1124 表现良好的最长时间段 Rating : 1908 题目描述 我们认为当员工一天中的工作小时数大于 8 小时的时候,那么这一天就是「劳累的一天」。 所谓「表现良好的时间段」,意味在这段时间内,「劳累的天数」是严格…...

达梦数据库会话、事务阻塞排查步骤
查询阻塞的事务IDselect * from v$trxwait order by wait_time desc;--单机select * from v$dsc_trxwait order by wait_time desc;–DSC集群查询阻塞事务的会话信息select sf_get_session_sql(sess_id),* from v$sessions where trx_id69667;--单机select sf_get_session_sql(…...

sqlServer 2019 开发版(Developer)下载及安装
下载软件 官网只有2022的,2019使用百度网盘进行下载 安装下崽器 选择自定义安装 选择语言、以及安装位置 点击“安装” 安装 SQL Server 可能的故障 以上步骤安装后会弹出以上界面,如果未弹出,手动去安装目录下点击 SETUP.EXE 文件…...
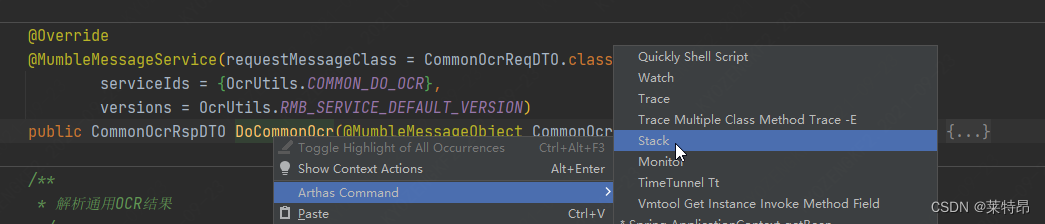
使用Arthas定位问题
功能概述 首先,Arthas的常用功能大概有以下几个: 解决依赖冲突 sc命令:模糊查看当前 JVM 中是否加载了包含关键字的类,以及获取其完全名称。 sc -d 关键字 注意使用 sc -d 命令,获取 classLoaderHash命令:…...
性能测试之tomcat+nginx负载均衡
nginx tomcat 配置准备工作:两个tomcat 执行命令 cp -r apache-tomcat-8.5.56 apache-tomcat-8.5.56_2修改被复制的tomcat2下conf的server.xml 的端口号,不能与tomcat1的端口号重复,不然会启动报错 ,一台电脑上想要启动多个tomcat,…...
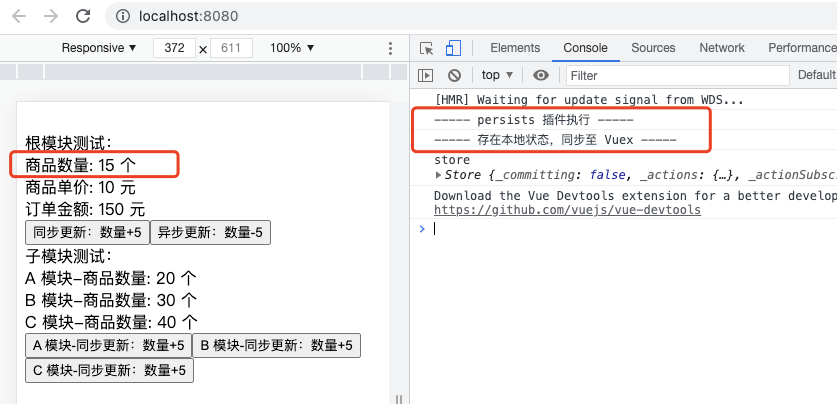
【手写 Vuex 源码】第十一篇 - Vuex 插件的开发
一,前言 上一篇,主要介绍了 Vuex-namespaced 命名空间的实现,主要涉及以下几个点: 命名空间的介绍和使用;命名空间的逻辑分析与代码实现;命名空间核心流程梳理; 本篇,继续介绍 Vu…...
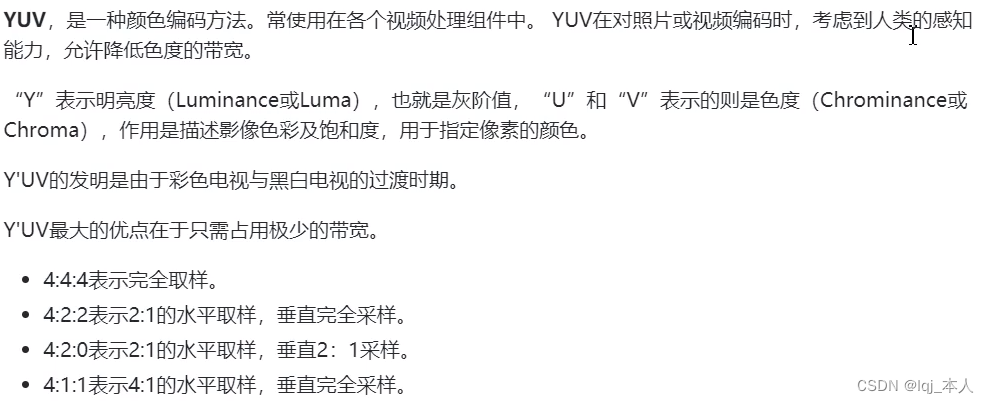
opencv基础知识和绘图图形
大家好,我是csdn的博主:lqj_本人 这是我的个人博客主页: lqj_本人的博客_CSDN博客-微信小程序,前端,python领域博主lqj_本人擅长微信小程序,前端,python,等方面的知识https://blog.csdn.net/lbcyllqj?spm1011.2415.3001.5343哔哩哔哩欢迎关注…...

15- 决策回归树, 随机森林, 极限森林 (决策树优化) (算法)
1. 决策回归树: from sklearn.tree import DecisionTreeRegressor model DecisionTreeRegressor(criterionmse,max_depth3) model.fit(X,y) # X是40个点 y是一个圆 2. 随机森林 稳定预测: from sklearn.ensemble import RandomForestClassifier # model RandomForestC…...

Flink相关的记录
Flink源码编译首次编译的时候,去除不必要的操作,同时install会把Flink中的module安装到本地仓库,这样依赖当前module的其他组件就无需去远程仓库拉取当前module,节省了时间。mvn clean install -T 4 -DskipTests -Dfast -Dmaven.c…...

配置可视化-基于form-render的无代码配置服务(一)
背景 有些业务场景需要产品或运营去配置JSON数据提供给开发去使用(后面有实际业务场景的说明),原有的业务流程,非开发人员(后面直接以产品指代)把数据交给开发,再由开发去更新JSON数据。对于产…...
Java 代理模式详解
1、代理模式 代理模式是一种比较好理解的设计模式。简单来说就是 我们使用代理对象来代替对真实对象(real object)的访问,这样就可以在不修改原目标对象的前提下,提供额外的功能操作,扩展目标对象的功能。 代理模式的主要作用是扩展目标对象…...
知识付费小程序怎么做_分享知识付费小程序的作用
在线知识付费产业的主要业务逻辑是基于用户的主动学习需求,为其提供以跨领域基础知识与技能为核心的在线知识服务,提升其达到求知目的的效率。公众号和小程序的迅速发展,又为知识付费提供了技术支持,从而促进了行业的进一步发展。…...
14- 决策树算法 (有监督学习) (算法)
决策树是属于有监督机器学习的一种决策树算法实操: from sklearn.tree import DecisionTreeClassifier # 决策树算法 model DecisionTreeClassifier(criterionentropy,max_depthd) model.fit(X_train,y_train)1、决策树概述 决策树是属于有监督机器学习的一种,起源…...

如何编译和运行C++程序?
C 和C语言类似,也要经过编译和链接后才能运行。在《C语言编译器》专题中我们讲到了 VS、Dev C、VC 6.0、Code::Blocks、C-Free、GCC、Xcode 等常见 IDE 或编译器,它们除了可以运行C语言程序,还可以运行 C 程序,步骤是一样的&#…...

Golang 给视频添加背景音乐 | Golang工具
目录 前言 环境依赖 代码 总结 前言 本文提供给视频添加背景音乐,一如既往的实用主义。 主要也是学习一下golang使用ffmpeg工具的方式。 环境依赖 ffmpeg环境安装,可以参考我的另一篇文章:windows ffmpeg安装部署_阿良的博客-CSDN博客 …...

让AI护理医疗:解决卫生系统的痛点
一、引言 1.对医疗领域中AI技术的介绍 随着人工智能的不断发展,它已经成为了各个领域中的重要组成部分。在医疗领域中,AI技术也逐渐发挥着越来越重要的作用。从诊断到治疗,从健康管理到研究,人工智能已经深刻地影响着医疗领域的…...
Windows 离线安装 MySQL 8
目录 1. 下载离线安装包 2. 上传解压 3 配置 my.ini 文件 4 设置系统环境变量 5 安装 MySQL 6 登录 MySQL 客户环境是内网环境,不能访问外网,只能离线安装 MySQL 了。 1. 下载离线安装包 MySQL 离线压缩包官网下载地址:MySQL :: Down…...

【前端攻城狮之vue基础】02路由+嵌套路由+路由query/params传参+路由props配置+replace属性+编程式路由导航+缓存路由组件
路由的基础知识1.路由简介2.路由基本使用3.嵌套路由4.传递路由的query传参# 5.传递路由的params参数6.路由的props传参配置7.路由router-link标签的replace属性8.编程式路由导航9.缓存路由组件1.路由简介 路由是一条条对应的key-value关系,key就是前端地址栏的路径…...

AI应用安全实战:使用SecurityLayer构建防护中间件
1. 项目概述:一个为AI应用量身定制的安全防护层最近在折腾AI应用开发,特别是那些需要调用外部API或者处理敏感用户输入的场景,安全问题总是让人头疼。你辛辛苦苦搭了个智能客服,结果用户输入一串精心构造的恶意提示词,…...

不止于configparser:用Python-dotenv管理敏感配置,让config.ini更安全
不止于configparser:用Python-dotenv管理敏感配置的进阶实践 在Python项目开发中,配置文件管理是每个开发者必须面对的基础问题。当你的代码需要连接数据库、调用第三方API或部署到不同环境时,如何安全高效地管理这些配置项就成了关键挑战。传…...
——深入分析Ring AllReduce算法与带宽最优性)
训练篇第5节:NCCL(二)——深入分析Ring AllReduce算法与带宽最优性
理解Ring AllReduce,你就掌握了数据并行分布式训练的通信命脉 前言 上一节我们学习了分布式训练的三种并行策略,其中数据并行最核心的通信原语就是AllReduce。在深入篇中,我们简单介绍了NCCL和AllReduce,但那一节更侧重API使用。今天,我们将深入Ring AllReduce算法的内部…...

2025届毕业生推荐的五大AI辅助写作网站实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 眼下,在学术以及职场文本生成这个范畴里,AI检测率过高这样的问题越发…...
)
Wireshark抓包实战:手把手教你解析IEC61850 GOOSE报文(附ASN.1解码技巧)
Wireshark实战解析IEC61850 GOOSE报文:从抓包到ASN.1解码全流程 在智能变电站自动化系统中,GOOSE(Generic Object Oriented Substation Event)报文作为IEC61850标准的核心通信机制,承担着保护跳闸、断路器位置信号等关…...

DPlayer:5个理由让你选择这款HTML5弹幕视频播放器
DPlayer:5个理由让你选择这款HTML5弹幕视频播放器 【免费下载链接】DPlayer :lollipop: Wow, such a lovely HTML5 danmaku video player 项目地址: https://gitcode.com/gh_mirrors/dp/DPlayer 还在为网页视频播放体验发愁吗?DPlayer用它的优雅设…...

JavaScript条形码生成技术:JsBarcode架构设计与跨平台实现方案
JavaScript条形码生成技术:JsBarcode架构设计与跨平台实现方案 【免费下载链接】JsBarcode Barcode generation library written in JavaScript that works in both the browser and on Node.js 项目地址: https://gitcode.com/gh_mirrors/js/JsBarcode 在现…...
)
告别延时函数!用STM32F103的TIM3 PWM精准驱动WS2812灯带(附完整代码)
STM32F103精准驱动WS2812灯带:PWM方案全解析与实战代码 在嵌入式LED控制领域,WS2812智能灯带因其级联控制、色彩丰富的特性广受欢迎。然而许多开发者在使用STM32驱动时,常陷入延时函数精度不足的困境——灯光闪烁、颜色失真、CPU占用率飙升等…...

野火IM 1.4.7版本发布:新增多项Server API接口,附多版本升级注意事项
野火IM 1.4.7:新增接口拓展功能边界野火IM 1.4.7版本正式发布,带来了一系列功能更新。新增了获取所有机器人的Server API接口、获取某个电话号码的用户列表的Server API接口,还为机器人添加了根据邮箱获取用户信息和批量获取用户信息的接口。…...
完整体系与战略应用)
贾子竞争哲学(Kucius Competition Philosophy)完整体系与战略应用
贾子竞争哲学(Kucius Competition Philosophy)完整体系与战略应用摘要贾子竞争哲学(Kucius Competition Philosophy)是一套彻底颠覆西方传统竞争范式的文明级战略理论,其核心主张是:竞争的本质从来不是主动…...