轨迹误差评估指标[APE/RPE]和EVO
轨迹误差评估指标[APE/RPE]和EVO
- 1. ATE/APE
- 2. RPE
- 3. EVO
- 3.1 评估指标
- 3.2 使用
- 3.2.1 轨迹可视化
- 3.2.2 APE
- 3.2.3 RPE
Reference:
- 高翔,张涛 《视觉SLAM十四讲》
- 视觉SLAM基础:算法精度评价指标(ATE、RPE)
在实际工程中,我们经常需要评估一个算法的估计轨迹与真实轨迹的差异来评价算法的精度。真实轨迹往往通过某些更高精度的系统获得,而估计轨迹则是由待评价的算法计算得到的。考虑一条估计轨迹 Testi,iT_{esti,i}Testi,i 和真实轨迹 Tgt,iT_{gt,i}Tgt,i,其中 i=1,⋅⋅⋅,Ni=1,\cdot\cdot\cdot,Ni=1,⋅⋅⋅,N,那么我们可以定义一些误差指标来描述它们之间的差别。
1. ATE/APE
《视觉SLAM十四讲》上的命名感觉跟 EVO 稍微有一点点区别,比如绝对轨迹误差(Absolute Trajectory Error, ATE):
ATEall=1N∑i=1N∥log(Tgt,i−1Testi ,i)∨∥22,\mathrm{ATE}_{\mathrm{all}}=\sqrt{\frac{1}{N} \sum_{i=1}^N\left\|\log \left(T_{\mathrm{gt}, i}^{-1} T_{\text {esti }, i}\right)^{\vee}\right\|_2^2}, ATEall=N1i=1∑Nlog(Tgt,i−1Testi ,i)∨22,这玩意儿应该就是 EVO 中的 绝对位姿误差(Absolute Pose Error, APE),后面这个概念统称 APE。
这个公式实际上是每个位姿李代数的均方根误差(Root-Mean-Squared Error, RMSE)。这种误差可以刻画两条轨迹的旋转和平移误差。同时,也有的地方仅考虑平移误差,从而可以定义绝对平移误差(Absolute Translational Error, ATE):
ATEtrans =1N∑i=1N∥trans(Tgt,i−1Test ,i)∥22\mathrm{ATE}_{\text {trans }}=\sqrt{\frac{1}{N} \sum_{i=1}^N\left\|\operatorname{trans}\left(\boldsymbol{T}_{\mathrm{gt}, i}^{-1} \boldsymbol{T}_{\text {est }, i}\right)\right\|_2^2} ATEtrans =N1i=1∑Ntrans(Tgt,i−1Test ,i)22其中 trans 表示取括号内部变量的平移部分。因为从整条轨迹上看,旋转出现误差后,随后的轨迹在瓶以上也会出现误差,所以两种指标在实际中都适用。
2. RPE
RPE 定义的是相对的误差。例如,考虑 iii 时刻到 i+Δti+\Delta ti+Δt 时刻的运动,那么相对位姿误差(Relative Pose Error, RPE)可定义为:
RPEall =1N−Δt∑i=1N−Δt∥log((Tgt,i−1Tgt,i+Δt))−1(Testi ,i−1Testi ,i+Δt))∨∥22,\mathrm{RPE}_{\text {all }}=\sqrt{\left.\frac{1}{N-\Delta t} \sum_{i=1}^{N-\Delta t} \| \log \left(\left(T_{\mathrm{gt}, i}^{-1} T_{\mathrm{gt}, i+\Delta t}\right)\right)^{-1}\left(T_{\text {esti }, i}^{-1} T_{\text {esti }, i+\Delta t}\right)\right)^{\vee} \|_2^2,} RPEall =N−Δt1i=1∑N−Δt∥log((Tgt,i−1Tgt,i+Δt))−1(Testi ,i−1Testi ,i+Δt))∨∥22,同样地,也可只取平移部分:
RPEtrans =1N−Δt∑i=1N−Δt∥trans((Tgt,i−1Tgt,i+Δt))−1(Testi ,i−1Testi ,i+Δt))∥22\mathrm{RPE}_{\text {trans }}=\sqrt{\left.\frac{1}{N-\Delta t} \sum_{i=1}^{N-\Delta t} \| \operatorname{trans}\left(\left(\boldsymbol{T}_{\mathrm{gt}, i}^{-1} \boldsymbol{T}_{\mathrm{gt}, i+\Delta t}\right)\right)^{-1}\left(T_{\text {esti }, i}^{-1} T_{\text {esti }, i+\Delta t}\right)\right) \|_2^2} RPEtrans =N−Δt1i=1∑N−Δt∥trans((Tgt,i−1Tgt,i+Δt))−1(Testi ,i−1Testi ,i+Δt))∥22
3. EVO
使用示例如下:
evo_ape kitti ground_truth.txt laser_odom.txt -r full --plot --plot_mode xyz
evo_rpe kitti ground_truth.txt laser_odom.txt -r trans_part --delta 100 --plot --plot_mode xyz
evo_ape 的默认形式是 -r trans_part,即计算的是这里的 ATE,想要计算 APE,可以使用 -r full。
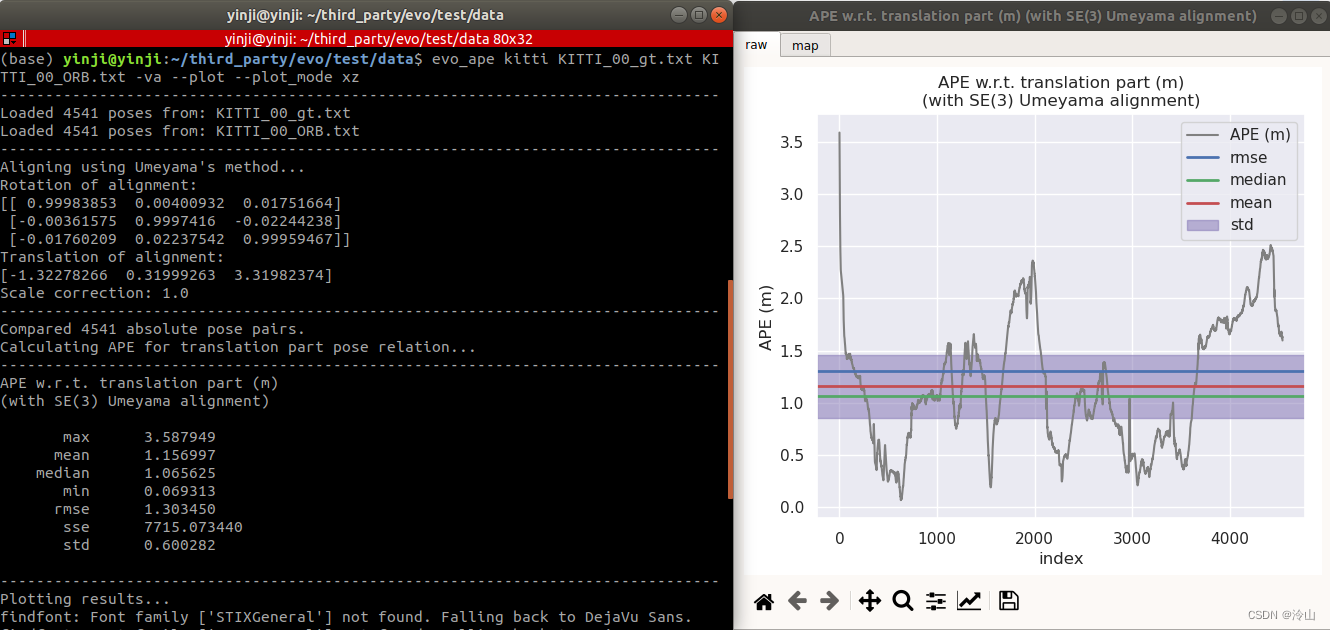
3.1 评估指标
- max:表示最大误差;
- mean:平均误差;
- median:误差中位数;
- min:最小误差;
- rmse:均方根误差;
- sse:和方差、误差平方和;
- std:标准差
3.2 使用
可以先使用 EVO 仓库中自带的数据尝试
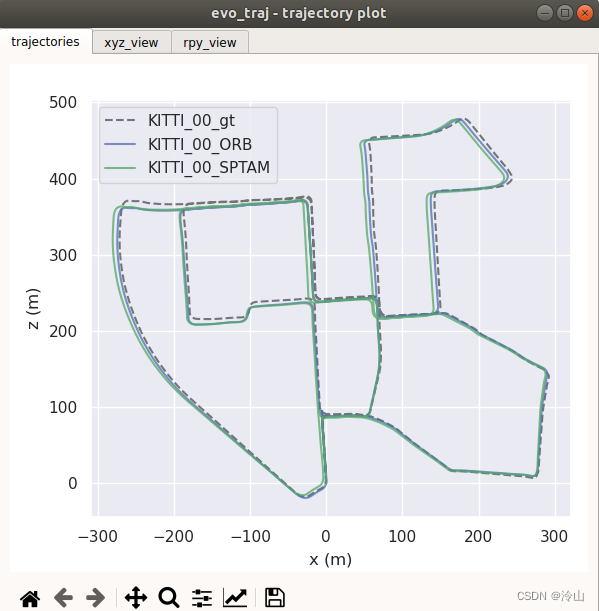
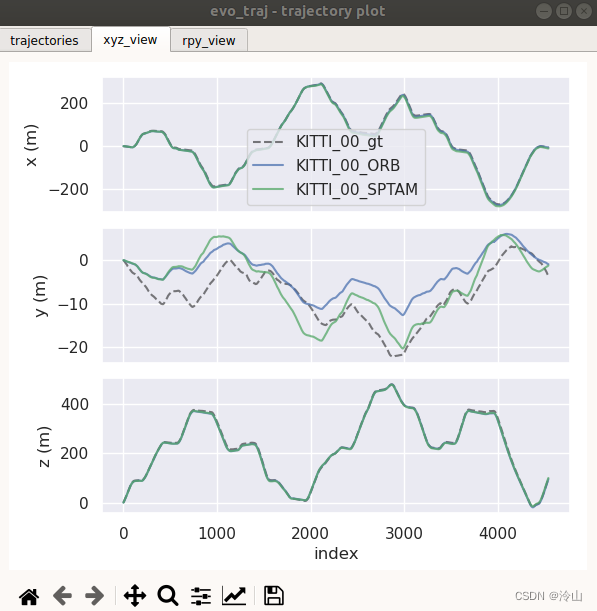
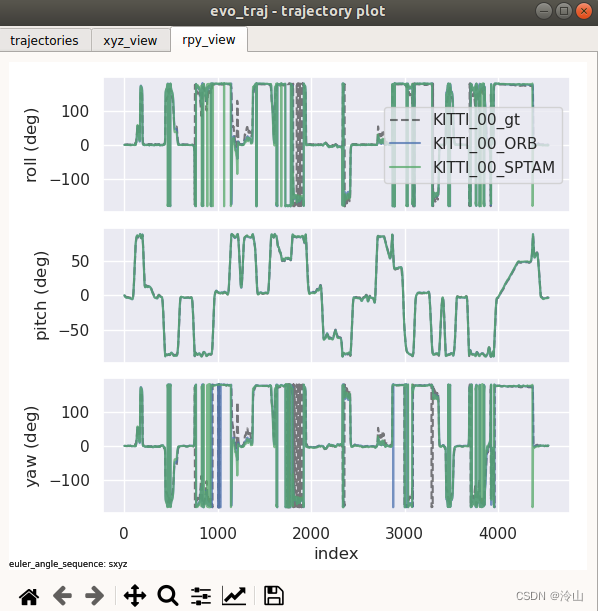
3.2.1 轨迹可视化
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz
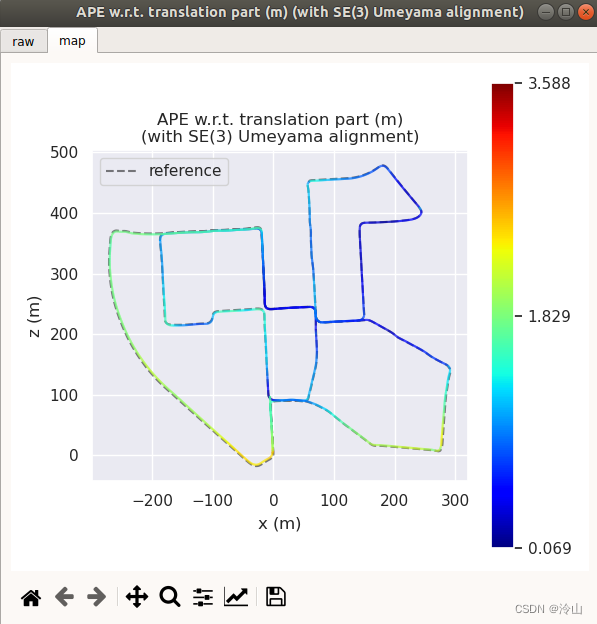
3.2.2 APE
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -va --plot --plot_mode xz
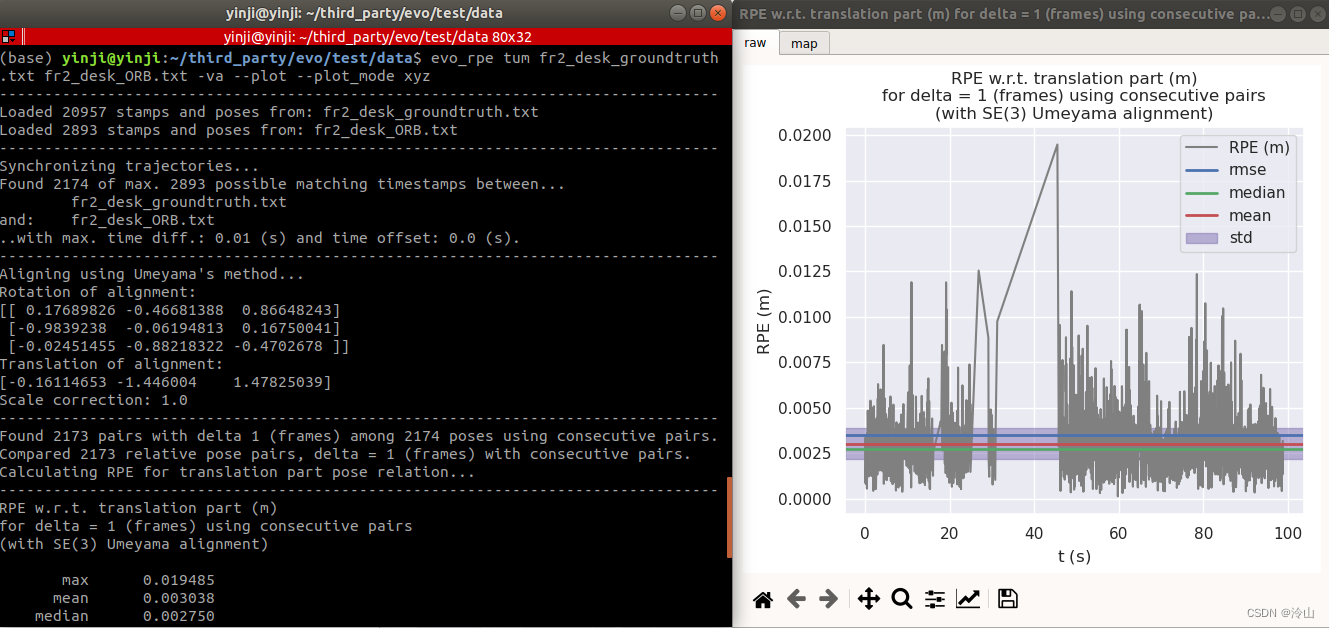
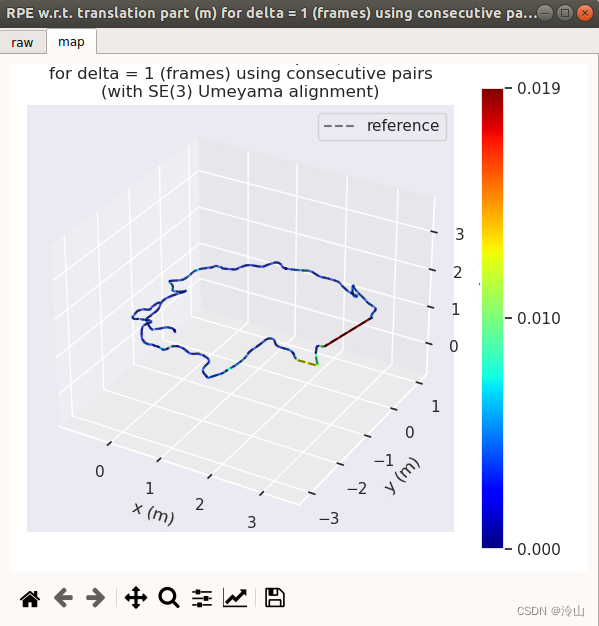
3.2.3 RPE
evo_rpe tum fr2_desk_groundtruth.txt fr2_desk_ORB.txt -va --plot --plot_mode xyz
相关文章:
轨迹误差评估指标[APE/RPE]和EVO
轨迹误差评估指标[APE/RPE]和EVO1. ATE/APE2. RPE3. EVO3.1 评估指标3.2 使用3.2.1 轨迹可视化3.2.2 APE3.2.3 RPEReference: 高翔,张涛 《视觉SLAM十四讲》视觉SLAM基础:算法精度评价指标(ATE、RPE) 在实际工程中,我…...
uni-app 消息推送功能UniPush
uni-app 消息推送功能UniPush,这里用的是uni-app自带的UniPush1.0(个推服务),所以只针对UniPush1.0介绍实现步骤。 建议查阅的文章: UniPush 1.0 使用指南[2] Unipush 常见问题[3] 当然现在已经出了UniPush2.0(HBuilde…...
场景应用)
面试题(二十六)场景应用
1. 场景应用 1.1 微信红包相关问题 参考答案 概况:2014年微信红包使用数据库硬抗整个流量,2015年使用cache抗流量。 微信的金额什么时候算? 微信红包的金额是拆的时候实时算出来,不是预先分配的,采用的是纯内存计…...

密码技术在车联网安全中的应用与挑战
随着智慧交通和无人驾驶的快速发展,车联网产业呈现蓬勃发展态势,车与云、车与车、车与路、车与人等综合网络链接的融合程度越来越高,随之而来的安全挑战也更加严峻。解决车联网的安全问题需要一个整体的防护体系,而密码技术凭借技…...

富媒体数据管理解决方案:简化、优化、自动化
富媒体数据管理解决方案:简化、优化、自动化 适用于富媒体的 NetApp 解决方案有助于简化和降低数据管理成本,优化全球媒体工作流并自动执行媒体资产管理。这将有助于减轻您的负担。 为什么选择 NetApp 的富媒体数据管理解决方案? 成本更低…...
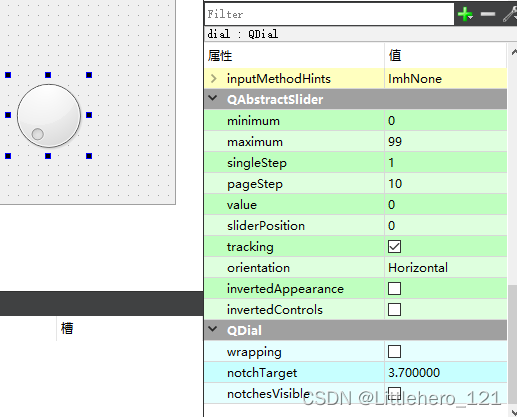
QT入门Input Widgets之QFontComboBox、QTextEdit、QPlainTextEdit、QDial、QKeySequenceEdit
目录 一、QFontComboBox的相关介绍 1、实际使用 二、QTextEdit与QPlainTextEdit 三、QDial的相关介绍 四、QKeySequenceEdit的相关介绍 此文为作者原创,创作不易,转载请标明出处! 一、QFontComboBox的相关介绍 1、实际使用 一般使用较…...
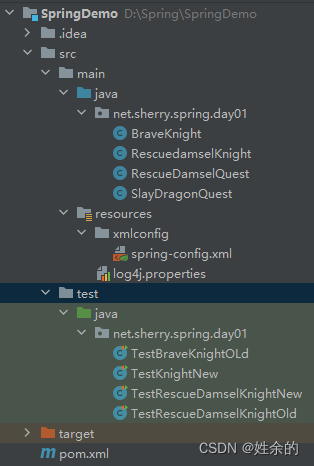
Java企业级开发学习笔记
文章目录一、Spring1.1、Slay Dragon1.2、RescueDamselQuest一、Spring 第一周写了两个小项目均使用了原始调用和容器的方法 两个项目:<斩杀大龙与上路保卫战> 配一张文件位置图 1.1、Slay Dragon BraveKnight package net.sherry.spring.day01;public c…...
基础算法 ---高精度)
【算法基础】(一)基础算法 ---高精度
✨个人主页:bit me ✨当前专栏:算法基础 🔥专栏简介:该专栏主要更新一些基础算法题,有参加蓝桥杯等算法题竞赛或者正在刷题的铁汁们可以关注一下,互相监督打卡学习 🌹 🌹 dz…...
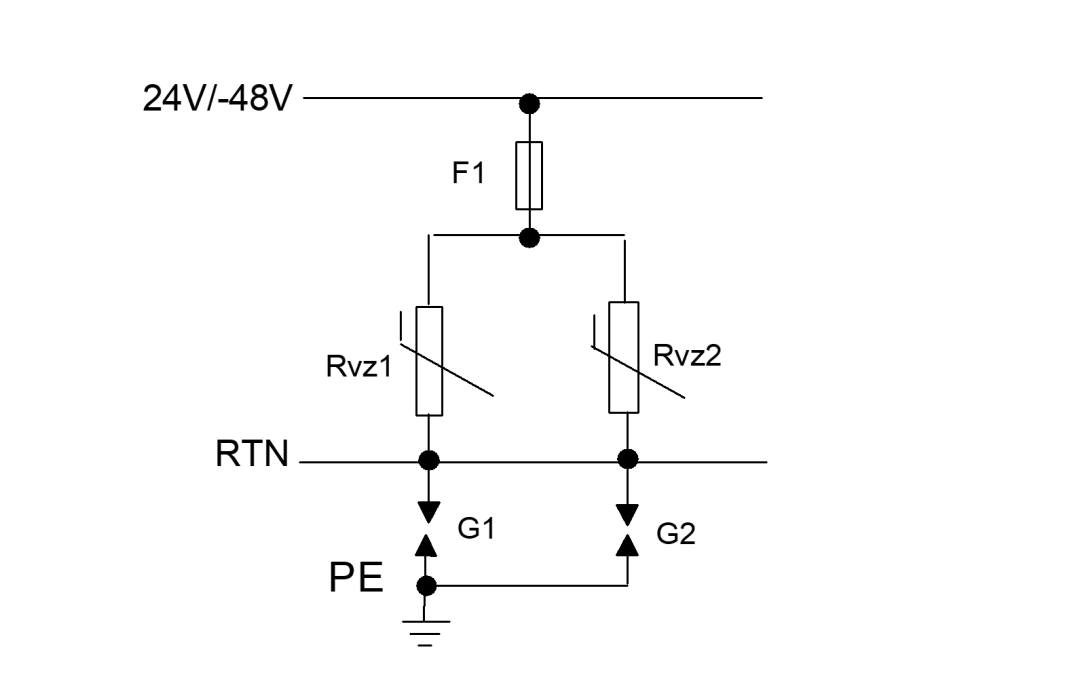
电源口防雷器电路设计方案
电源口防雷电路的设计需要注意的因素较多,有如下几方面:1、防雷电路的设计应满足规定的防护等级要求,且防雷电路的残压水平应能够保护后级电路免受损坏。2、在遇到雷电暂态过电压作用时,保护装置应具有足够快的动作响应速度&#…...
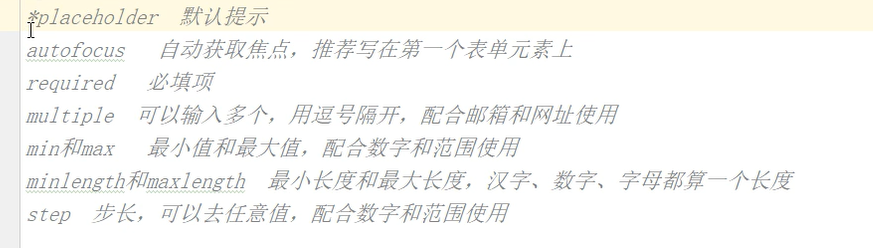
【零基础入门前端系列】—表单(七)
【零基础入门前端系列】—表单(七) 一、什么是表单 表单在Web网页中用来给访问者填写信息,从而采集客户信息端,使得网页具有交互功能。一般是将表单设计在一个HTML文档中,当用户填写完信息后做提交操作,于…...
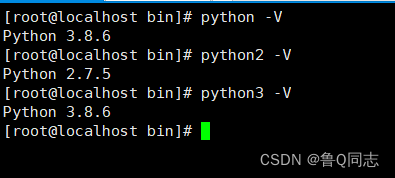
Linux安装python3
Linux安装python3一.介绍二.下载三.配置1.文件夹2.安装依赖3.安装4.配置4.1python关系4.2配置测试-映射python3文件4.2.1 不用设置默认python3为默认版本4.2.2 将python3设置默认版本一.介绍 因为我的Centos7虚拟机里面只有python2.7.5,我想安装一个python3但是还要…...

怎么通过中级职称有窍门吗?
中级职称评审对人才加薪、升职自然不必说,更重要的是职称证书对于公司和企业同样具有重要的价值和意义,因此只要是说公司办理资质或者有项目招投标的公司对于人才参加中级职称评审毫无疑问会给予大力支持,既然工程师职称有这么多的好处&#…...
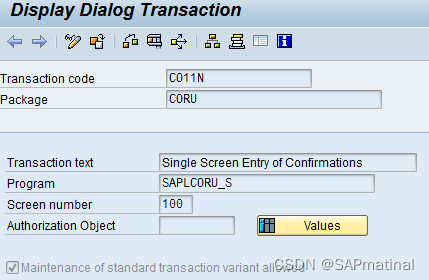
SAP ABAP根据事务码查找增强最直接的方法
下面是为任意事务代码查找用户出口的步骤: 方法一: 第 1 步:使用 事务代码:SE93。输入您要搜索用户出口的 事务代码。 在我们的场景中,我们将使用 CO11N。 第 2 步:点击显示: 第 3 步…...

HTTP协议——详细讲解
目录 一、HTTP协议 1.http 2.url url的组成: url的保留字符: 3.http协议格式编辑 ①http request ②http response 4.对request做出响应 5.GET与POST方法 ①GET ②POST 7.HTTP常见Header ①Content-Type:: 数据类型(text/html等)在上文…...
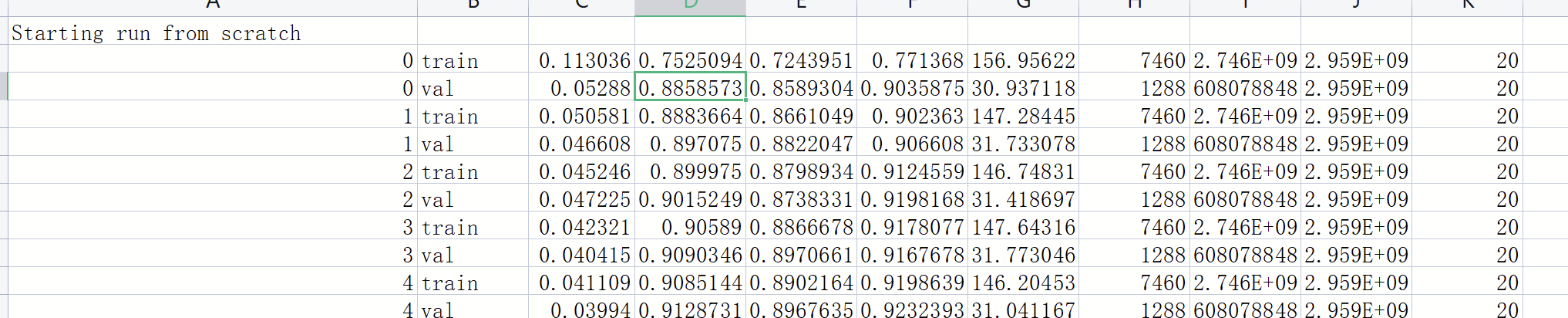
echonet-dynamic代码解读
1 综述 一共是这些代码,我们主要看echo.py,segmentation.py,video.py,config.py。 2 配置文件config.py 基于配置文件设置路径。 """Sets paths based on configuration files."""import conf…...
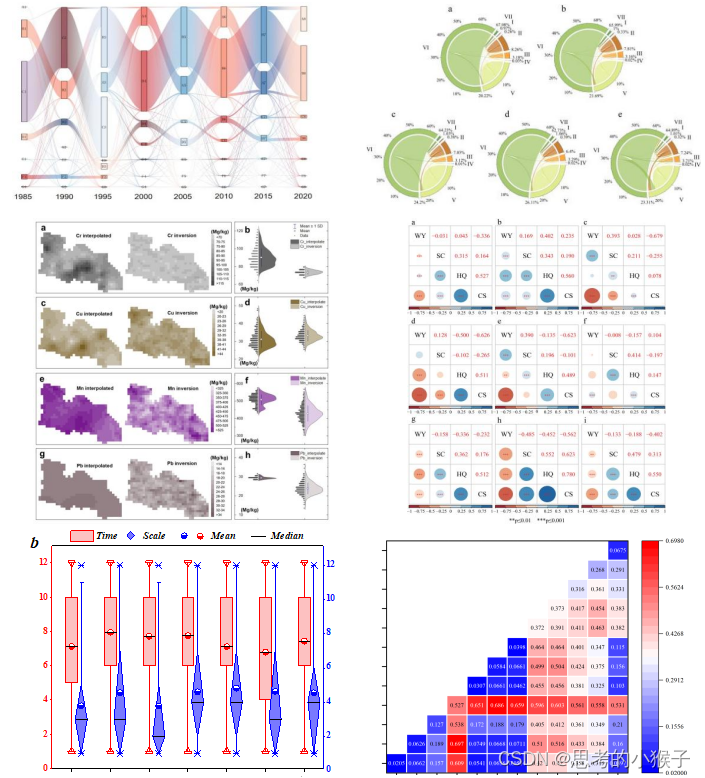
大气温室气体浓度不断增加,导致气候变暖加剧,随之会引发一系列气象、生态和环境灾害怎样解决?
大气温室气体浓度不断增加,导致气候变暖加剧,随之会引发一系列气象、生态和环境灾害。如何降低温室气体浓度和应对气候变化已成为全球关注的焦点。海洋是地球上最大的“碳库”,“蓝碳”即海洋活动以及海洋生物(特别是红树林、盐沼和海草&…...
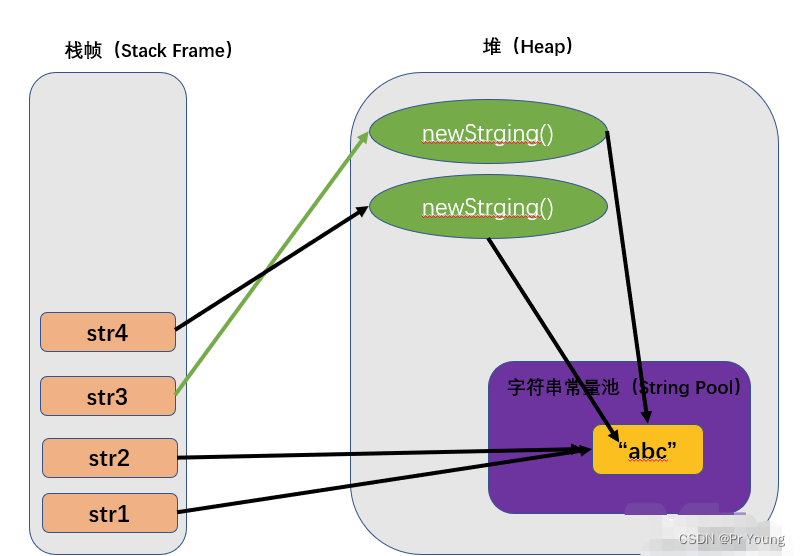
字符串内存分配
涉及三块区域:栈,堆,字符串常量池(jdk1.7之前在方法区,jdk1.7之后在堆中) 关于字符串常量池到底在不在堆中: jdk1.6及以前,方法区独立存在(不在堆里面)&…...

CHI协议通道概念
通道定义为一组结点之间的通信信号。CHI协议定义了四种通道,请求REQ、响应RSP、侦听SNP和数据DAT。 RN结点上CHI协议通道信号组包括: 请求发送端信号,RN结点发送读/写等请求,从不接收请求响应接收端信号,RN结点接收来…...
XQuery 简介
XQuery 简介 解释 XQuery 最佳方式是这样讲:XQuery 相对于 XML 的关系,等同于 SQL 相对于数据库表的关系。 XQuery 被设计用来查询 XML 数据 - 不仅仅限于 XML 文件,还包括任何可以 XML 形态呈现的数据,包括数据库。 您应该具备的…...

Spring的Bean的生命周期与自动注入细节
1. Bean的生命周期 通过一个LifeCycleBean和一个MyBeanPostProcessor来观察Bean的生命周期: 构造(实例化)->依赖注入(前后处理)->初始化(前后处理)->销毁 LifeCycleBean Component public class LifeCycleBean {private static final Logger log LoggerFactory.g…...

污水处理通气帽标准尺寸参数与国标通气帽定制要点
在好些个工程现场当中,人们往往会忽略掉一个看起来平常但是特别要害的小部件——通气帽。特别是在污水处理的体系当中,它承担平衡内部和外部的气压,阻止异味向外溢出,阻拦异物进入等好几个方面的功能。要是选择类型不适合…...
)
FPGA仿真入门:手把手教你配置Quartus Prime 21.1里的Questa Starter版(附12个月免费许可攻略)
FPGA仿真工具链实战:从Questa Starter许可申请到Quartus Prime深度集成 当数字逻辑设计从纸上谈兵进入硬件实现阶段,仿真验证便成为FPGA开发流程中不可逾越的质量关卡。作为Intel FPGA生态中的黄金搭档,Quartus Prime与Questa的协同工作能帮助…...

在模型广场根据任务需求与预算快速筛选合适的大模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在模型广场根据任务需求与预算快速筛选合适的大模型 对于开发者而言,面对市场上众多的大模型,如何快速找到…...

不精确计算:芯片设计中的功耗优化与精度权衡技术
1. 不精确计算:从学术概念到芯片设计的功耗革命在移动设备、物联网终端和边缘计算节点无处不在的今天,功耗已经取代了单纯的性能,成为许多芯片设计的首要约束。我们习惯了处理器以全精度、零误差的方式执行每一条指令,但你是否想过…...

如何免费解锁Cursor Pro:完整破解方案与实战指南
如何免费解锁Cursor Pro:完整破解方案与实战指南 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your trial re…...

Python 3.14.5 发布:多项改进,垃圾回收器回滚,还有这些新特性!
Python 3.14.5 发布Python 3.14.5 现已发布,这是 3.14 的第五个维护版本。自 3.14.4 以来,包含约 154 项错误修复、构建改进和文档更改。垃圾回收器回滚值得注意的是,Python 3.14.5 中的垃圾回收器 (GC) 发生了变化。由于一些原因,…...

Cangaroo:开源CAN总线分析软件的技术架构与部署指南
Cangaroo:开源CAN总线分析软件的技术架构与部署指南 【免费下载链接】cangaroo Open source can bus analyzer software - with support for CANable / CANable2, CANFD, and other new features 项目地址: https://gitcode.com/gh_mirrors/ca/cangaroo Cang…...

Linux 系统运行速度慢有哪些排查方法?
Linux 系统变慢通常是资源供需失衡导致的,建议按 CPU、内存、磁盘 I/O、网络的顺序依次排查,优先使用 top、free、iostat 等基础命令定位瓶颈。 先说结论:系统卡顿本质是核心资源被过度占用,需先定位具体瓶颈资源,再针…...

R3nzSkin英雄联盟皮肤修改器完整教程:免费体验全皮肤的终极指南
R3nzSkin英雄联盟皮肤修改器完整教程:免费体验全皮肤的终极指南 【免费下载链接】R3nzSkin Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3n/R3nzSkin R3nzSkin是一款专为《英雄联盟》玩家设计的开源皮肤修改工具&a…...

【Claude Kubernetes配置终极指南】:20年SRE亲授生产环境零失误部署的7大黄金法则
更多请点击: https://intelliparadigm.com 第一章:Claude Kubernetes配置的核心理念与演进脉络 Claude 并非原生 Kubernetes 组件,而是 Anthropic 推出的大型语言模型系列;当将其部署于 Kubernetes 集群时,“Claude K…...