【重器】GPS北斗卫星时钟基准与卫星授时服务技术原理
【重器】GPS北斗卫星时钟基准与卫星授时服务技术原理
【重器】GPS北斗卫星时钟基准与卫星授时服务技术原理
1.前言
由计算机网络系统组成的分布式系统,若想协调一致进行:IT行业的“整点开拍”、“秒杀”、“Leader选举”,通信行业的“同步组网”之类业务处理,毫秒级甚至微秒级的时间同步是重要基础之一。
2.术语描述
2.0 世界时
世界时UT,可以简单理解为按照地球自转一周来计量24小时的时间标准,由于地球自转速率的变化,世界时的秒长会有微小的变化,每天的快慢可以达到千分之几秒。
2.1 TAI时间
世界时不准,因此国际组织定义了TAI时间,即国际原子时( International Atomic Time),其起点是1958年的开始(世界时UT),以铯原子钟走秒连续计时的时间。
2.2 UTC时间
计算机网络普遍使用的UTC时间(协调世界时),由国际计量局BIPM综合全世界多个守时实验室的钟组计算得到,为了使UTC时间与地球自转1天的时间(世界时UT)协调一致,每隔1到2年, BIPM会通告在UTC时间6月30日或12月31日最后一分钟“加一秒”或“减一秒”等闰秒调整。也就是说,UTC时间会出现60秒或少了59秒的情况。
最近一次闰秒是UTC时间2015年6月底:
2015 年6月30日,23时 59分 59秒
2015 年6月30日,23时 59分 60秒
2015 年7月 1日, 0时 0分 0秒
由于存在闰秒,UTC时间与TAI时间是有差别的,UTC = TAI - n,这个n现在(2016年1月)是36秒,也就是说UTC时间比TAI时间慢了36秒。
2.3 北京时间
北京时间也就是东八区时间,在UTC时间基础上加8小时,中国的北京标准时间由位于陕西的国家授时中心发播。
2.4 GPS时间
由GPS系统通过卫星信号发播的原子时间,GPS时间用自1980年1月6日零点(UTC时间)起的星期数和该星期内内的秒数来表示。
工程上,GPS接收机会根据闰秒数将GPS时间换算为我们通常使用的UTC时间。GPS时间的源头是美国海军天文台的守时原子钟组。
2.5 北斗(BDS)时间
由北斗卫星导航系统通过卫星信号发播的原子时间,同样,北斗接收机会根据闰秒数将北斗时间换算为我们通常使用的UTC时间。
北斗时间的时钟源是位于北京的解放军时频中心的守时原子钟组,陕西的国家授时中心好尴尬:(。
2.6 频率
时间的导数就是频率,机械发条、石英晶体振荡器、原子钟等各种时钟源通过产生频率信号,按照频率均匀打拍计数,模拟时间的等间隔流逝,就有了可见的“时间”。
2.7 频率准确度
手表有准和不准的,反映的就是频率准不准,时钟频率和标准频率的偏差可以用频率准确度来衡量。1E-9量级表示1秒会差1ns,我们使用的个人电脑,它的守时时钟是个32. 768kHz的石英晶振,准确度大概只有2E-5量级(20ppm),也就是说1秒会差0.02ms,1天会跑偏大概2秒。
2.8 时间同步
广义的“时间同步”包括的时间和频率的同步。上级时钟将时间频率信号通过各种有线(以太网、SDH数字网、同轴电缆、电话等)、无线(卫星、长波、电台、微波、WIFI、Zigbee等)链路传递给下级时钟,下级时钟接受时间频率信息后,与上级时钟保持相位、频率的一致。
3.时间同步原理
3.1 单向授时
上级时钟主动发播时间信息,下级用户端被动接受时间信息,并调整本地时钟使时差控制在一定范围内。
要想提高授时精度,用户端必须计算出时间信息在传播链路中的延时,GPS/北斗等卫星授时,可以通过用户端定位与卫星之间距离确定电磁传输延时,消除大部分误差,而电缆、网络等如果是单向授时方式就无法准确计算单向链路时延了。
3.2 双向授时
用户端将接受的时间信息原路返回给上级时钟服务端,服务端将往返时间除以二即得到单向链路时延,再把单向时延告诉客户端,在此基础上,客户端得到服务端更准确的时间信息。比如:北斗单向卫星授时精度100ns,双向卫星授时精度可做到20ns。
3.3 网络时间同步
网络时间同步,特指在计算机网络内的服务器与客户端之间利用网络报文交换实现的时间同步。
鉴于计算机网络传输路径的不确定性和中间路由交换设备转发报文时间的不确定性,通过单播或多播实现的单向网络授时是不可靠的。因此,前辈们发明的网络时间同步技术NTP/PTP等,基本原理都是通过对网络报文打时间戳(标记),往返交换报文计算传输时延和同步误差。
3.4 频率同步
频率同步指的是主从时钟的频率误差保持在一定范围内,频率同步有2种类型:
第1种是直接传递模拟频率信号,比如用电缆或光缆传递10MHz、5Mhz、2.048MHz等标准频率,或者传递bit位宽脉冲;
第2种是通过测量得到的主从时钟时差,通过锁定主从相差实现频率锁定(PLL),或者间接计算频率偏差,完成频率修正。
4.计算机网络时间同步
计算机网络时间同步只是时间同步的一种应用场景,其时间传递的链路可能是SDH网、以太网、WIFI无线网络等。
4.1 NTP
NTP(Network Time Protocol)从1985年诞生来,目前仍在在大部分的计算机网络中起着同步系统时间的作用。
• 基本原理
服务器和客户端之间通过二次报文交换,确定主从时间误差,客户端校准本地计算机时间,完成时间同步,有条件的话进一步校准本地时钟频率。
• 时间同步过程
服务器在UDP的132端口提供授时服务,客户端发送附带T1时间戳(Timestamp)的查询报文给服务器,服务器在该报文上添加到达时刻T2和响应报文发送时刻T3,客户端记录响应报到达时刻T4。
改个维基的图:
• 时差计算
维基这个图中用蓝色标注了主从直接来回链路的时延Sigma:
Sigma = (t4-t1)-(t3-t2)
因此,假设来回网络链路是对称的,即传输时延相等,那么可以计算客户端与服务器之间的时间误差Delta为:
Delta = t2-t1-Sigma/2=((t2-t1)+(t3-t4))/2
客户端调整自身的时间Delta,即可完成一次时间同步。
• 计时方式
NTP采用UTC时间计时,NTP时间戳包括自1900-01-01 00:00:00开始的UTC总秒数,当前秒的亚秒数。
当正闰秒时,60秒和下一分钟的0秒的NTP总秒数一致的,因此NTP报文专门定义了闰秒指示域来提示。
• 误差分析
局域网内计算机利用NTP协议进行时间同步,时间同步精度在5ms左右,主要误差包括:
1)计算机打时间戳的位置在应用层,受协议栈缓存、任务调度等影响,不能在网络报文到来时马上打戳;
2)各种中间网络传输设备带来的传输时延不确定性以及链路的不对称性,将进一步降低NTP时间同步精度。
4.2 PTP
为克服NTP的各种缺点,PTP(Precision Time Protocol,精确时间同步协议)应运而生,最新协议是IEEE1588v2,可实现亚微秒量级的时间同步精度。
• 基本原理
主从节点在网络链路层打时间戳,利用支持IEEE1588协议的PHY片,精准记录时间同步网络报文接受或发送的时刻。交换机、路由器等网络中间节点准确记录时间同步报文在其中停留的时间,实现对链路时延的准确计算。
• 时间同步过程
PTP默认使用组播协议,二层或四层UDP组播都可以,一般我们使用基于UDP组播,使用319和320两个端口。
PTP定义了三种角色:OC、BC和TC。我们一般接触的是OC:主时钟和从时钟,交换机、路由器一般是BC或TC。
由于硬件性能有限,网络报文发送时记录的时刻信息,可以在随后的Follow_Up跟随报文中发出,这就是PTP的双步模式(Two-step)。
下图是两OC主从时钟之间的同步过程:
• a.主时钟向从时钟发送Sync报文,并在本地记录发送时间t1;从时钟收到该报文后,记录接收时间t2。
• b.时钟发送Sync报文之后,紧接着发送一个携带有t1的Follow_Up报文。
• c.从时钟向主时钟发送Delay_Req报文,用于发起反向传输延时的计算,并在本地记录发送时间t3;主时钟收到该报文后,记录接收时间t4。
• d.主时钟收到Delay_Req报文之后,回复一个携带有t4的Delay_Resp报文。
• 时差计算
与NTP一样的原理,从时钟根据拥有的t1~t4这四个时间戳,由此可计算出主、从时钟间的往返总延时为:
Sigma = (t4-t1)-(t3-t2)
假设网络是对称的,从时钟相对于主时钟的时钟偏差为:
Delta = t2-t1-Sigma/2=((t2-t1)+(t3-t4))/2
• 计时方式
与NTP不同,PTP采用TAI世界原子时间计时,而且PTP计时的起点与unix时间一致,即UTC时间1970年1月1日0点。
PTP主钟会告知从钟,当前UTC相对于TAI的累计偏移量,从钟据此计算当前准确的UTC时间。
• 误差分析
PTP能准确记录报文发送和接受的时间,也能计算中间链路的延时,剩下影响最大的就是网络链路的不对称性了。
在实际工程中,网络中间链路设备不支持PTP协议,大大降低了PTP的同步精度。目前,PTP主要应用在通信同步网、电力同步网等行业网络系统里。
• 同步拓扑
PTP域中所有的时钟节点都按一定层次组织在一起,可通过BMC(Best Master Clock,最佳主时钟)协议动态选举出最优时钟,最优时钟的时间最终将被同步到整个PTP域中。
BMC算法与STP(Spaning Tree Protocl)生成树协议类似,最终形成无环路的树形网络拓扑,且都是动态选举,能适应最佳主时钟切换的变化。
• 扩展应用——PTP over SDH
充分利用各行业已有的SDH通信网络,利用PTP-E1信号转换设备,架设PTP同步网络,除了需要考虑链路倒换问题之外,SDH网络的时延稳定性可大幅提升网络时间同步精度。
4.3 SyncE同步以太网
以太网最早只能传输数据信号,有另外独立的频率同步网络,随着以太网的快速发展,SyncE(Synchronized Ethernet)同步以太网技术诞生后,企业们有了新的选择。
• 基本原理
时钟节点利用以太网(1000M、1G、10G等)物理层的空闲间隙,传递位宽时钟信号,实现时钟频率信号(25M、125M等)的自上而下传递。
• 协议控制
类似于SDH网络等时间间隔传递的SSM同步状态信息,同步以太网(Sync-E)利用链路层ESMC协议封装传递SSM信息,SSM信息包含时钟质量信息,接收端据此选择合适的上级网络时钟。
• 应用
一般商业PHY片提供SyncE功能选项,开启该功能模式,即可利用PHY恢复出来的频率信号,校准本地时钟频率或分频后用于本地计时。
相关文章:

【重器】GPS北斗卫星时钟基准与卫星授时服务技术原理
【重器】GPS北斗卫星时钟基准与卫星授时服务技术原理 【重器】GPS北斗卫星时钟基准与卫星授时服务技术原理 1.前言 由计算机网络系统组成的分布式系统,若想协调一致进行:IT行业的“整点开拍”、“秒杀”、“Leader选举”,通信行业的“同步组网…...
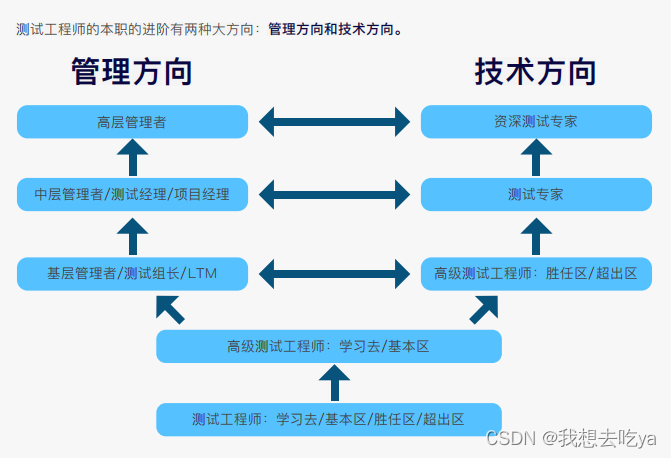
软件测试未来发展趋势怎么样
未来,互联网技术是很多企业能够活下去的关键点。互联网技术成为新的基建,互联网“基建”化就决定了软件测试行业的缺口会一直扩大。 并且,软件测试岗位,已不仅局限于互联网企业,现已逐步深入到实体产业,金…...

aws Distro for OpenTelemetry 可观测性workshop记录
参考资料 https://aws-otel.github.io/docs/introductionhttps://aws-otel.github.io/docs/introduction aws distro for opentelemetry 官方提供了不同语言不同使用场景下完善的使用实例和相关配置。 AWS Distro for OpenTelemetrics 由以下部分组成,用于向后端…...

Leetcode力扣秋招刷题路-0068
从0开始的秋招刷题路,记录下所刷每道题的题解,帮助自己回顾总结 68. 文本左右对齐 给定一个单词数组 words 和一个长度 maxWidth ,重新排版单词,使其成为每行恰好有 maxWidth 个字符,且左右两端对齐的文本。 你应该…...
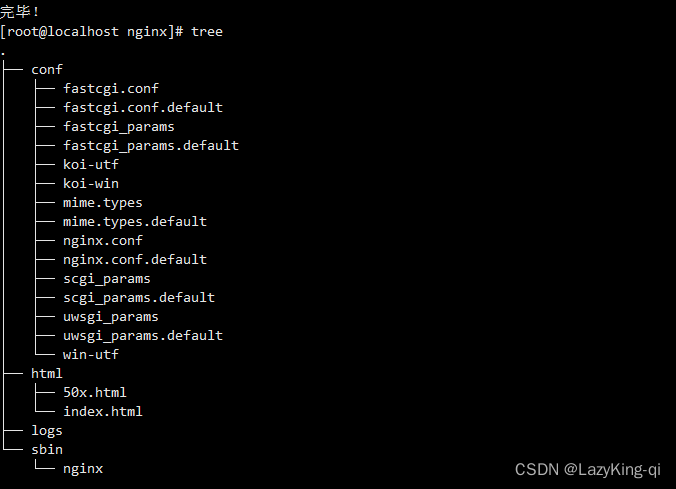
Nginx介绍及安装(windows版,Linux版)
目录 一、Nginx介绍 1、Nginx优势 2、Nginx作用 3、部署静态资源 4、代理 5、负载均衡 二、Nginx安装步骤(windows版) 三、Nginx安装步骤(Linux版) 1、官网下载安装包,下载完之后上传到Linux系统上 2、在Lin…...

Camera | 4.瑞芯微平台MIPI摄像头应用程序编写
前面3篇我们讲解了camera的基础概念,MIPI协议,CSI2,常用命令等,本文带领大家入门,如何用c语言编写应用程序来操作摄像头。 Linux下摄像头驱动都是基于v4l2架构,要基于该架构编写摄像头的应用程序ÿ…...

【1250. 检查「好数组」】
来源:力扣(LeetCode) 描述: 给你一个正整数数组 nums,你需要从中任选一些子集,然后将子集中每一个数乘以一个 任意整数,并求出他们的和。 假如该和结果为 1,那么原数组就是一个「…...
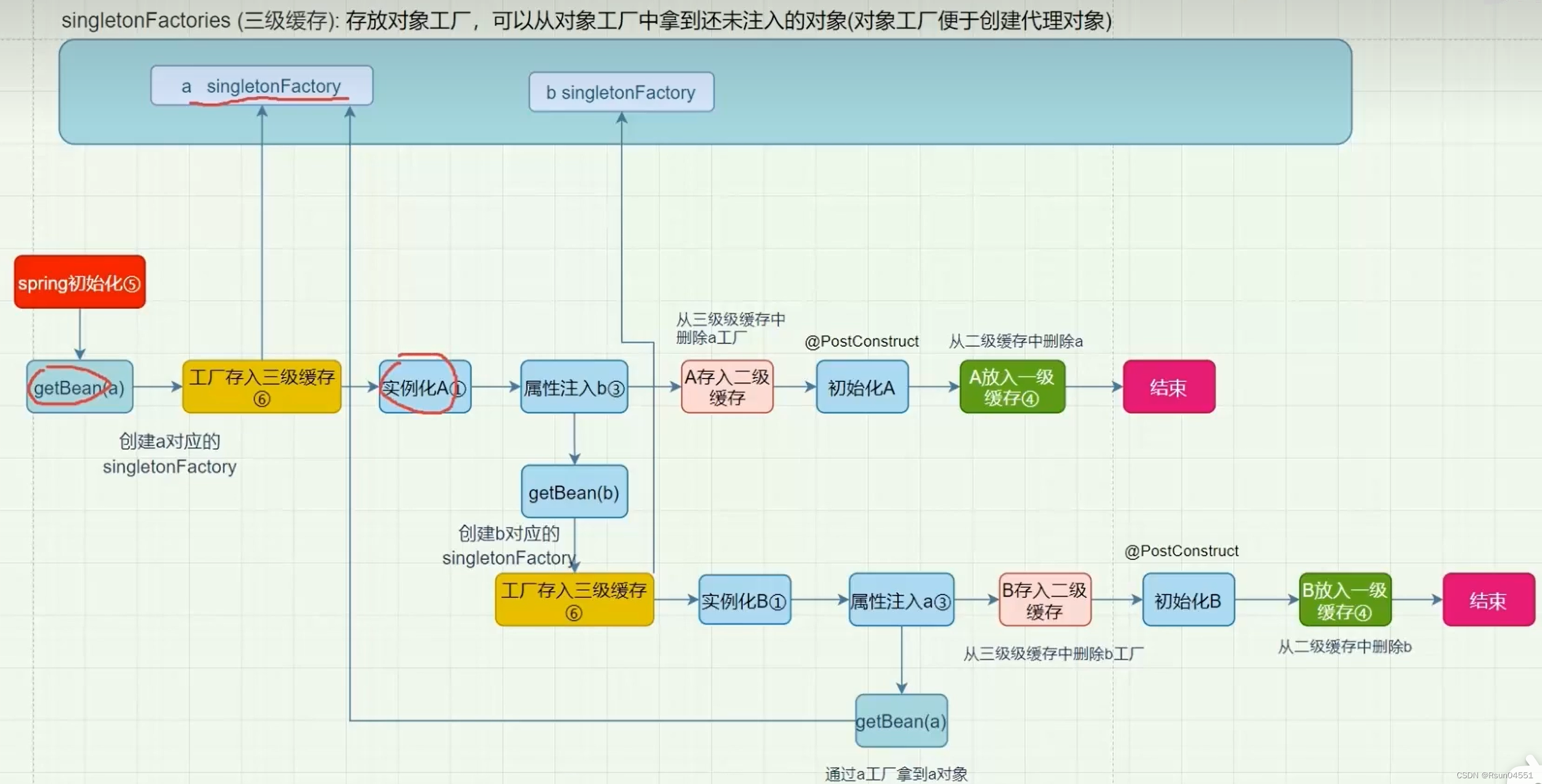
Spring 如何解决循环依赖?
什么是循环依赖 ? 一个或多个对象之间存在直接或间接的依赖关系,这种依赖关系构成一个环形调用,有下面 3 种方式。 我们看一个简单的 Demo,对标“情况 2”。 Service public class Louzai1 {Autowiredprivate Louzai2 louzai2;…...
CocoaPods使用指南
前言 对于大多数软件开发团队来说,依赖管理工具必不可少,它能针对开源和私有依赖进行安装与管理,从而提升开发效率,降低维护成本。针对不同的语言与平台,其依赖管理工具也各有不同,例如 npm 管理 Javascri…...

Kafka 消息队列
目录主流的消息队列消息队列的应用场景缓存/肖锋解耦异步处理KafkaKafka的定义Kafka的底层基础架构Kafka分区如何保证Leader选举Kafka分区如何保证Leader和Follower数据的一致性Kafka 中消费者的消费方式Kafka 高效读写数据的原因(高性能吞吐的原因)&…...
| 真题+思路+考点+代码+岗位)
华为OD机试 - 挑选字符串(Python)| 真题+思路+考点+代码+岗位
挑选字符串 题目 给定a-z,26 个英文字母小写字符串组成的字符串A和B, 其中A可能存在重复字母,B不会存在重复字母, 现从字符串A中按规则挑选一些字母可以组成字符串B 挑选规则如下: 同一个位置的字母只能挑选一次, 被挑选字母的相对先后顺序不能被改变, 求最多可以同时…...

对比Hashtable、HashMap、TreeMap有什么不同?
第9讲 | 对比Hashtable、HashMap、TreeMap有什么不同? Map 是广义 Java 集合框架中的另外一部分,HashMap 作为框架中使用频率最高的类型之一,它本身以及相关类型自然也是面试考察的热点。 今天我要问你的问题是,对比 Hashtable、…...
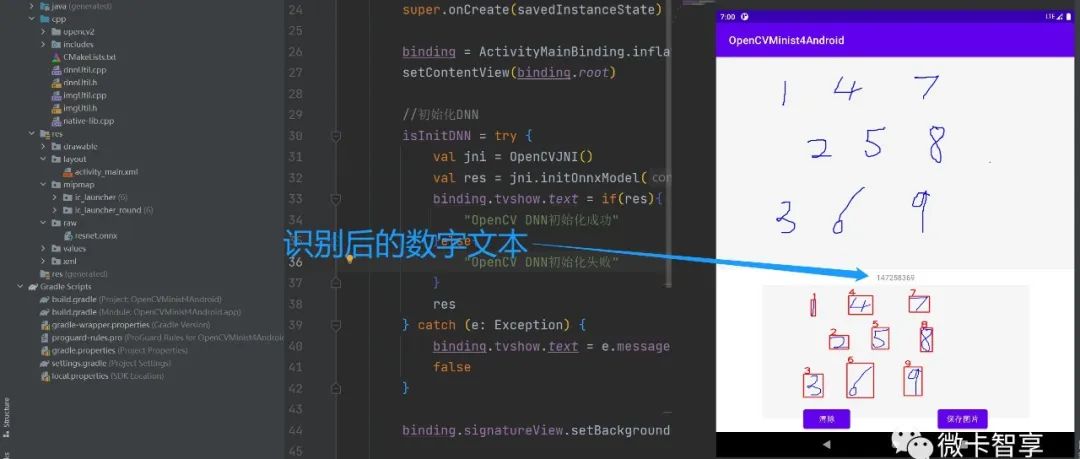
测试新版Android Studio的手机镜像效果
学更好的别人, 做更好的自己。 ——《微卡智享》 本文长度为669字,预计阅读2分钟 前言 春节刚上班,就开始了疯狂出差的节奏,期间发现Android Studio发布新的版本2022.1.1(Electric Eel),里面两个更新的内容蓝牙模拟器和…...

女生可以参加IT培训吗?
2023年了,就不要把性别当作选择专业的前提条件了。虽然这句话说过很多次了,作为IT行业来说,是非常欢迎女生的加入;尤其是整天都是面对一大堆男攻城狮,工作氛围一点都不活跃,反而显得压抑和杂乱,…...
刷题25-重排链表
重排链表 解题思路:通过观察链表可以发现,把链表一分为二,后半段链表反转,然后两个链表穿插连接,当链表的节点总数是奇数时,要保证链表的前半段比后半段多一个节点。 关于把链表一分为二,可以…...
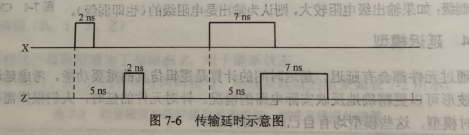
VHDL-延迟模型-惯性延迟与传输延迟
目录 1,惯性延时 2,传输延时 信号通过元件都会有延迟,延迟时间的计算是逻辑仿真的重要功能。考虑延迟信息得到的仿真输出波形可以更精确地反映实际电路的情况。针对元件的延时,人们根据需要建立了一些用的延时模型,这…...

2023年美赛(MCM/ICM)简介
2023年美赛将要如期开赛,这里为了 让大家对今年的美赛有一个直接 客观的了解。对2023年美赛(MCM/ICM)进行一下简要的介绍。相关资料大家可以查看另一篇文章一、竞赛时间February 16-20, 2023开赛时间 北京时间 17号(本周五) 6:00结束时间 北京时间 21号(…...

5min完成linux环境Jenkins的安装
5min搞定linux环境Jenkins的安装安装Jenkinsstep1: 使用wget 命令下载Jenkinsstep2、创建Jenkins日志目录并运行jekinsstep3、访问jenkins并解锁jenkins,安装插件以及创建管理员用户step4、到此,就完成了Finish、以上步骤中遇到的问题1、 jenkins启动不了…...
| 真题+思路+考点+代码+岗位)
华为OD机试 - 字母计数(Python)| 真题+思路+考点+代码+岗位
字母计数 题目 给出一个只包含字母的字符串, 不包含空格,统计字符串中各个子字母(区分大小写)出现的次数, 并按照字母出现次数从大到小的顺序输出各个字母及其出现次数 如果次数相同,按照自然顺序排序,且小写字母在大写字母之前 输入 输入一行仅包含字母的字符串 输出 按…...

DENSE 数据集 - STF 数据集(CVPR 2020)
DENSE 数据集 - STF 数据集 - Seeing Through Fog Without Seeing Fog: Deep Multimodal Sensor Fusion in Unseen Adverse Weather(CVPR 2020)摘要1. 引言2. 相关工作3. 多模式恶劣天气数据集3.1 多模态传感器设置3.2 记录4. 自适应深度融合4.1 自适应多…...

终极解决方案:VisualCppRedist AIO一站式修复Windows运行库问题
终极解决方案:VisualCppRedist AIO一站式修复Windows运行库问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否经常在Windows系统上遇到"…...

AI架构绘图副驾驶:用自然语言生成专业Excalidraw架构图
1. 项目概述与核心价值 如果你和我一样,每天都要面对陌生的、动辄几十个微服务的复杂代码库,或者需要向团队解释一个新系统的设计,那你一定理解那种“认知过载”的痛苦。在脑海里构建整个系统的架构图,试图理清服务间的调用关系和…...

2026 极简环境搭建:使用 Miniconda + pip-tools 锁定 PyTorch 生态依赖全链路方案
前言:一个被依赖管理“毒打”过的故事 不知道你是否有过这样的经历——花了一整天终于把模型训练跑通,隔了一周想在同一台机器上复现结果,环境居然崩了。一通排查才发现,某个依赖偷偷升了一个小版本,API 变了,训练逻辑静默出错。更崩溃的是,把代码交给同事,他花了三个…...

LNG船BOG再液化系统流程优化与动态蒸发率控制【附模型】
✨ 本团队擅长数据搜集与处理、建模仿真、程序设计、仿真代码、EI、SCI写作与指导,毕业论文、期刊论文经验交流。 ✅ 专业定制毕设、代码 ✅如需沟通交流,点击《获取方式》 (1)液氮预冷BOG缓冲再液化系统流程设计与Aspen HYSYS建模…...
)
从‘代码打架’到‘和谐共舞’:用Gogs实战演练多人Git协作全流程(附冲突解决脚本)
从‘代码打架’到‘和谐共舞’:用Gogs实战演练多人Git协作全流程(附冲突解决脚本) 在团队开发中,Git冲突就像两个程序员同时修改同一行代码时的"拳脚相加",而解决冲突的过程则是让代码重新"和谐共舞&q…...

3分钟极速获取百度网盘提取码:开源工具的终极使用指南
3分钟极速获取百度网盘提取码:开源工具的终极使用指南 【免费下载链接】baidupankey 项目地址: https://gitcode.com/gh_mirrors/ba/baidupankey 还在为百度网盘分享链接的提取码而烦恼吗?每次看到那个小小的输入框,是不是感觉宝贵的…...

AI绘画工作流自动化:从NovelAI到Pixiv的Semi-Auto工具实战
1. 项目概述:从手动到自动,解放AI绘画生产力的桌面利器如果你和我一样,是个深度沉迷于AI绘画的创作者,那你一定经历过这样的痛苦:在NovelAI的WebUI里,吭哧吭哧地调好一组参数,生成一张图&#x…...

AI智能体如何通过区块链钱包实现自动化加密云存储
1. 项目概述:当AI智能体遇上加密云存储如果你正在使用OpenClaw这类AI智能体平台,并且头疼于如何让它们自动、安全地处理云端数据——比如备份对话记录、上传生成的文件,或者管理需要付费的API服务——那么你很可能需要一个既懂区块链支付、又…...

如何用SketchUp STL插件轻松实现3D打印:从设计到实物的完整指南
如何用SketchUp STL插件轻松实现3D打印:从设计到实物的完整指南 【免费下载链接】sketchup-stl A SketchUp Ruby Extension that adds STL (STereoLithography) file format import and export. 项目地址: https://gitcode.com/gh_mirrors/sk/sketchup-stl 你…...

5分钟解决Windows热键冲突:Hotkey Detective完全指南
5分钟解决Windows热键冲突:Hotkey Detective完全指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否曾经…...