QT+OpenGL光照
QT+OpenGL光照
本篇完整工程见gitee:QtOpenGL 对应点的tag,由turbolove提供技术支持,您可以关注博主或者私信博主
颜色
现实生活中看到的物体的颜色并不是这个物体真正拥有的颜色,而是它所反射的颜色
太阳光能被看见的白光是多找演的的组合

颜色的数据化的由红色,绿色和蓝色三个分量组成,他们通常被缩写为RGB
例如:珊瑚红色
QVector3D color(1.0f, 0.5f, 0.31f);
上图颜色的代码展示
// 灯光颜色
QVector3D lightColor(1.0f, 1.0f, 1.0f);
// 珊瑚红色
QVector3D toyColor(1.0f, 0.5f, 0.31f);
QVector3D result = lightColor * toyColor; // 分量相乘,不是点乘也不是叉乘
代码展示:
light.frag
#version 330 core
out vec4 FragColor;
uniform vec3 lightColor;
void main()
{FragColor = vec4(lightColor, 1.0);
}
light.vert
#version 330 core
layout (location = 0) in vec3 aPos;
layout (location = 1) in vec3 aTexCord;uniform mat4 model;
uniform mat4 view;
uniform mat4 projection;void main()
{gl_Position = projection * view * model * vec4(aPos, 1.0);
}
void TurboOpenGLWidget::paintGL()
{QMatrix4x4 model;QMatrix4x4 view;float time = m_time.elapsed() / 50.0;model.rotate(time, 1.0f, 5.0f, 0.0f);glClearColor(0.2f, 0.3f, 0.3f, 1.0f);glEnable(GL_DEPTH_TEST);glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);shader_program_.bind();glBindVertexArray(VAO);QMatrix4x4 projection;projection.perspective(camera_.getZoom(), float(width() / height()), 0.1, 100);shader_program_.setUniformValue("projection", projection);view = camera_.getViewMatrix();switch(shape_){case Rect:shader_program_.setUniformValue("model", model);shader_program_.setUniformValue("view", view);for(const auto &item: cubePositions){model.setToIdentity();model.translate(item);model.rotate(time, 1.0, 5.0, 0.5);shader_program_.setUniformValue("model", model);glDrawArrays(GL_TRIANGLES,0,36);}break;}glBindVertexArray(0);glBindVertexArray(lightVAO);light_shader_program_.bind();light_shader_program_.setUniformValue("projection", projection);light_shader_program_.setUniformValue("model", model);light_shader_program_.setUniformValue("view", view);model.setToIdentity();model.translate(lightPos);model.rotate(1.0, 1.0, 5.0, 0.5);model.scale(0.2);light_shader_program_.setUniformValue("model", model);glDrawArrays(GL_TRIANGLES,0,36);update();
}
效果展示

冯氏光照模型
冯氏光照模型的主要结构有三个:
- 环境光(ambient)
- 即使在黑暗情况下,通常也仍然有一些光亮
- 漫反射(diffuse)
- 模拟光源对物体的方向性影响
- 镜面反射(specular)
- 模拟有光泽物体表面上出现的亮点
Iphong=ka⋅Iambient+∑i=1numLightsIi⋅(kd(L^i⋅N^)+ks⋅(R^i⋅V^)nshiny)I_{phong} = k_a\cdot I_{ambient} + \sum_{i = 1}^{numLights}I_i\cdot (k_d(\hat L_i\cdot \hat N) + k_s\cdot (\hat R_i \cdot \hat V)^{n^{shiny}}) Iphong=ka⋅Iambient+i=1∑numLightsIi⋅(kd(L^i⋅N^)+ks⋅(R^i⋅V^)nshiny)
其中kakdksk_a k_d k_skakdks是系数
环境光代码:
#version 330 core
out vec4 FragColor;
uniform vec3 objectColor;
uniform vec3 lightColor;
void main()
{float ambientStrength = 0.2;vec3 ambient = ambientStrength * lightColor;vec3 result = ambient * objectColor;FragColor = vec4(result, 1.0);
}
向上面代码,如果我们只有环境光,会是如下效果,并不是完全黑的。

漫反射代码:
计算漫反射光照需要:
- 法向量:一个垂直于顶点表面的向量
- 定向的光线:作为光源的位置与片段的位置之间的向量差的方向向量;为了计算这个光线,我们需要光的位置向量和片段的位置向量
片段着色器:
#version 330 core
out vec4 FragColor;uniform vec3 objectColor;
uniform vec3 lightColor;
uniform vec3 lightPos;in vec3 Normal;
in vec3 fragPos;void main()
{// ambientfloat ambientStrength = 0.1;vec3 ambient = ambientStrength * lightColor;// diffusevec3 norm = normalize(Normal);vec3 lightDir = normalize(lightPos - fragPos);float diff = max(dot(norm, lightDir), 0.0);vec3 diffuse = diff + lightColor;vec3 result = (ambient + diffuse) * objectColor;FragColor = vec4(result, 1.0);
}

镜面反射代码:
片段着色器:
#version 330 core
out vec4 FragColor;uniform vec3 objectColor;
uniform vec3 lightColor;
uniform vec3 lightPos;
uniform vec3 viewPos;in vec3 Normal;
in vec3 fragPos;void main()
{// ambientfloat ambientStrength = 0.1;vec3 ambient = ambientStrength * lightColor;// diffusevec3 norm = normalize(Normal);vec3 lightDir = normalize(lightPos - fragPos);float diff = max(dot(norm, lightDir), 0.0);vec3 diffuse = diff * lightColor;// specularfloat specularStrength = 0.5;vec3 viewDir = normalize(viewPos - fragPos);vec3 reflectDir = reflect(-lightDir, norm);float spec = pow(max(dot(viewDir, reflectDir), 0.0), 32);vec3 specular = specularStrength * spec * lightColor;vec3 result = (ambient + diffuse + specular) * objectColor;FragColor = vec4(result, 1.0);
}

法向量
-
如果模型矩阵执行了不等比例的缩放,顶点的改变导致法向量不再垂直与表面。
-
修复这个行为的诀窍是使用一个为法向量专门定制的模型矩阵。这个矩阵称之为法线矩阵
Normal = mat3(transpose(inverse(model))) * aNormal;
相关文章:
QT+OpenGL光照
QTOpenGL光照 本篇完整工程见gitee:QtOpenGL 对应点的tag,由turbolove提供技术支持,您可以关注博主或者私信博主 颜色 现实生活中看到的物体的颜色并不是这个物体真正拥有的颜色,而是它所反射的颜色 太阳光能被看见的白光是多找演的的组合…...

OpenCV-PyQT项目实战(7)项目案例03:鼠标框选
欢迎关注『OpenCV-PyQT项目实战 Youcans』系列,持续更新中 OpenCV-PyQT项目实战(1)安装与环境配置 OpenCV-PyQT项目实战(2)QtDesigner 和 PyUIC 快速入门 OpenCV-PyQT项目实战(3)信号与槽机制 …...
)
vue2版本《后台管理模式》(上)
后台管理模式项目开发经验总结如下,希望对你们有些帮助: 文章目录一、app 出口位置二 、 index.js 路由配置三、package.json 文件四、 main.js 既然安装插件那就需要引入五、 跨域问题总结首先需要一个完整的v2版本的项目 vue2版本思路:首先…...

C++与C基础重叠部分
Cmake CPP程序开发过程 计算机硬件—>机器语言—>汇编—>cppcpp—>机器(gcc)Make(makefile)—>本地智能批处理翻译机制Cmake—>跨平台生成不同设备上的makefile进行执行 Cpp基础学习 基本知识 基本格式 #include<iostream> using namespace std;…...

神经网络基础部件-卷积层详解
前言 在全连接层构成的多层感知机网络中,我们要通过将图像数据展平成一维向量来送入模型,但这会忽略了每个图像的空间结构信息。理想的策略应该是要利用相近像素之间的相互关联性,将图像数据二维矩阵送给模型中学习。 卷积神经网络(convolu…...
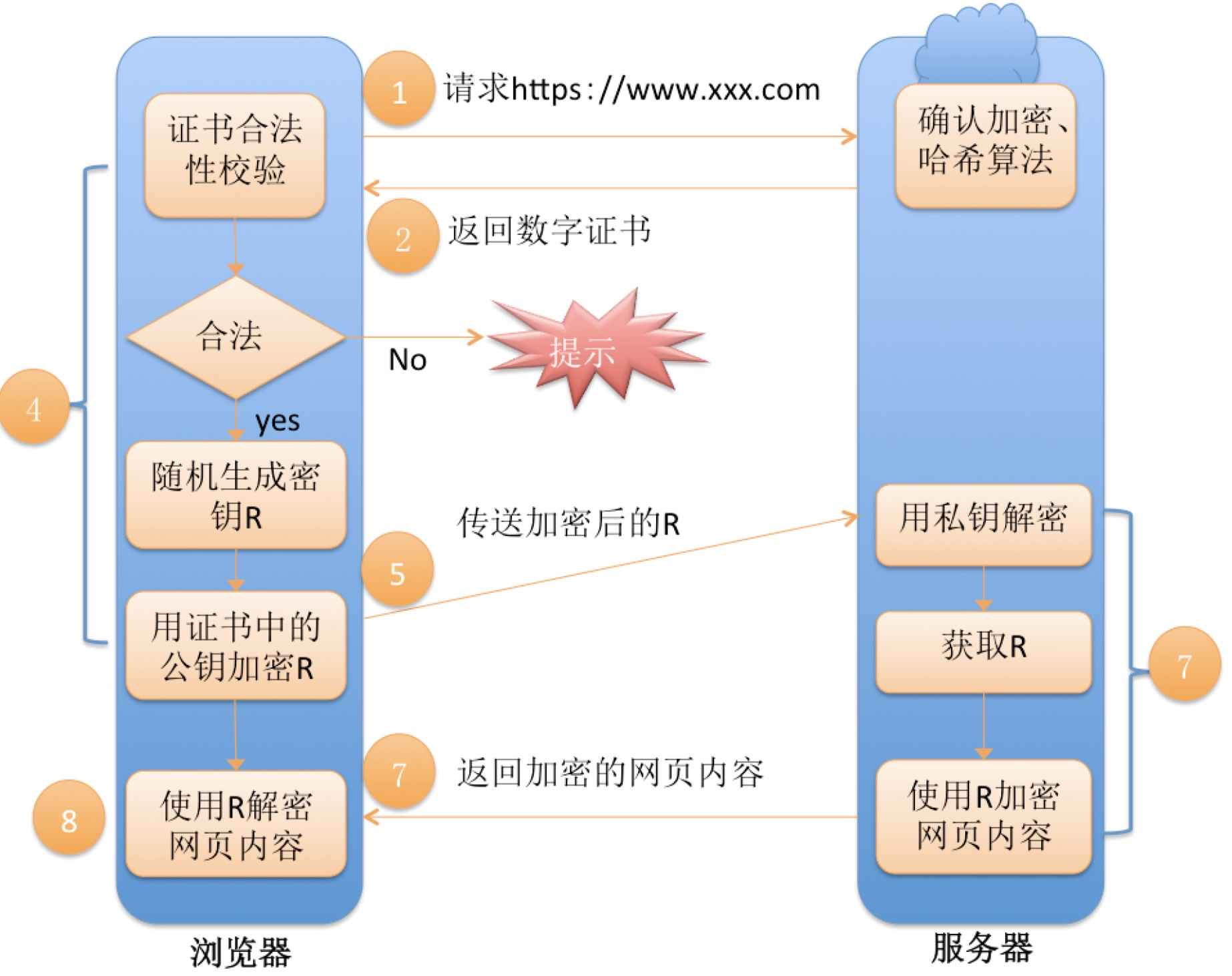
【计算机网络】HTTPS协议原理
文章目录一、认识HTTPS协议二、为什么要发明HTTPS三、HTTP与HTTPS的区别四、常见的加密方式1. 对称加密2. 非对称加密3. 数据摘要4. 数字签名五、HTTPS的原理探究方案1:只使用对称加密方案2:只使用非对称加密方案3:双方都使用非对称加密方案4…...

21岁,华科博士在读,我的赛事Top经验
Datawhale干货 作者:vaew,华中科技大学,博士二年级在读简介笔者vaew,21岁,现为华中科技大学机械科学与工程学院陶波教授课题组博士二年级学生。主要研究方向是基于视触融合的机器人灵巧操作。学业之余的研究兴趣包括图…...

基于ThinkPHP6.0+Vue+uni-app的多商户商城系统好用吗?
likeshop多商户商城系统适用于B2B2C、多商户、商家入驻、平台商城场景。完美契合平台自营联营加盟等多种经营方式使用,系统拥有丰富的营销玩法,强大的分销能力,支持官方旗舰店,商家入驻,平台抽佣商家独立结算ÿ…...

Linux中断
文章目录 前言一、Linux 中断介绍二、中断上文和中断下文三、中断相关函数1 获取中断号相关函数2.申请中断3.释放中断4.中断处理函数四.中断下文之 tasklet1.概念2.Linux 内核中的 tasklet 结构体:3.使用步骤4.相关函数a.初始化 tasklet结构体b.调度 taskletc.杀死 tasklet总结…...

Excel+SQL实战项目 - 餐饮业日销售情况分析仪
目录1、要完成的任务2、认识数据3、SQL数据加工4、excel形成分析仪1、要完成的任务 目标:结合SQL和excel实现餐饮业日销售情况分析仪,如下表: 认识分析仪: 切片器:店面 分为四部分:KPI 、组合图、饼图、数…...

电商导购CPS,京东联盟如何跟单实现用户和订单绑定
前言 大家好,我是小悟 做过自媒体的小伙伴都知道,不管是发图文还是发短视频,直播也好,可以带货。在你的内容里面挂上商品,你自己都不需要囤货,如果用户通过这个商品下单成交了,自媒体平台就会…...

Redis学习【6】之BitMap、HyperLogLog、Geospatial操作命令 (1)
文章目录前言BitMap 操作命令1.1 BitMap 简介1.2 setbit1.3 getbit1.4 bitcount1.5 bitpos[pos:position]1.6 bitop1.7 应用场景二 HyperLogLog 操作命令2.1 HyperLogLog 简介2.2 pfadd2.3 pfcount2.4 pfmerge2.5 应用场景三 Geospatial【地理空间】操作命令3. 1 Geospatial 简…...
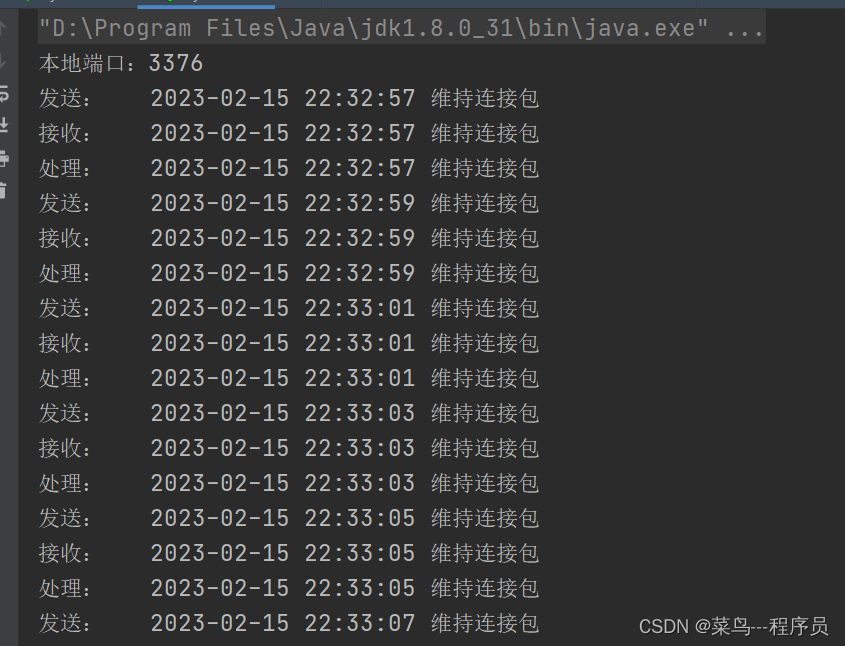
JAVA实现心跳检测【长连接】
文章目录1、心跳机制简介2、心跳机制实现方式3、客户端4 、服务端5、代码实现5.1 KeepAlive.java5.2 MyClient.java5.3 MyServer5.4 测试结果1、心跳机制简介 在分布式系统中,分布在不同主机上的节点需要检测其他节点的状态,如服务器节点需要检测从节点…...

python3.9安装和pandas安装踩坑处理
0、先决条件:系统内最好先安装有gcc、libffi-devel等 1、安装包下载 https://www.python.org/downloads/source/ 2、解压安装包并上传到/usr/local/python3.9 3、打开shell cd /usr/local/python3.9要先把python3.9的所有文件复制到/usr/local/python3.9才会成功…...
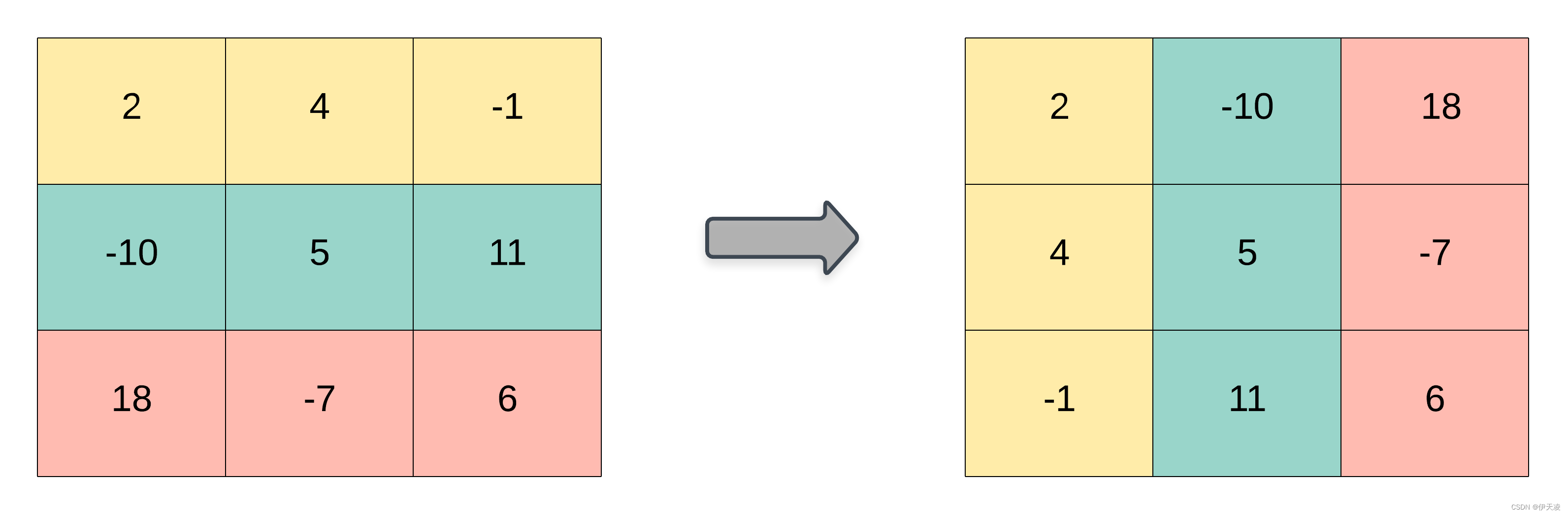
2023.2.15每日一题——867. 转置矩阵
每日一题题目描述解题核心解法一:二维表示 模拟解法二:一维表示 模拟题目描述 题目链接:867. 转置矩阵 给你一个二维整数数组 matrix, 返回 matrix 的 转置矩阵 。 矩阵的 转置 是指将矩阵的主对角线翻转,交换矩阵…...
【人脸识别】Partial-FC:让你在一台机器上训练1000万个id人脸数据集成为可能!
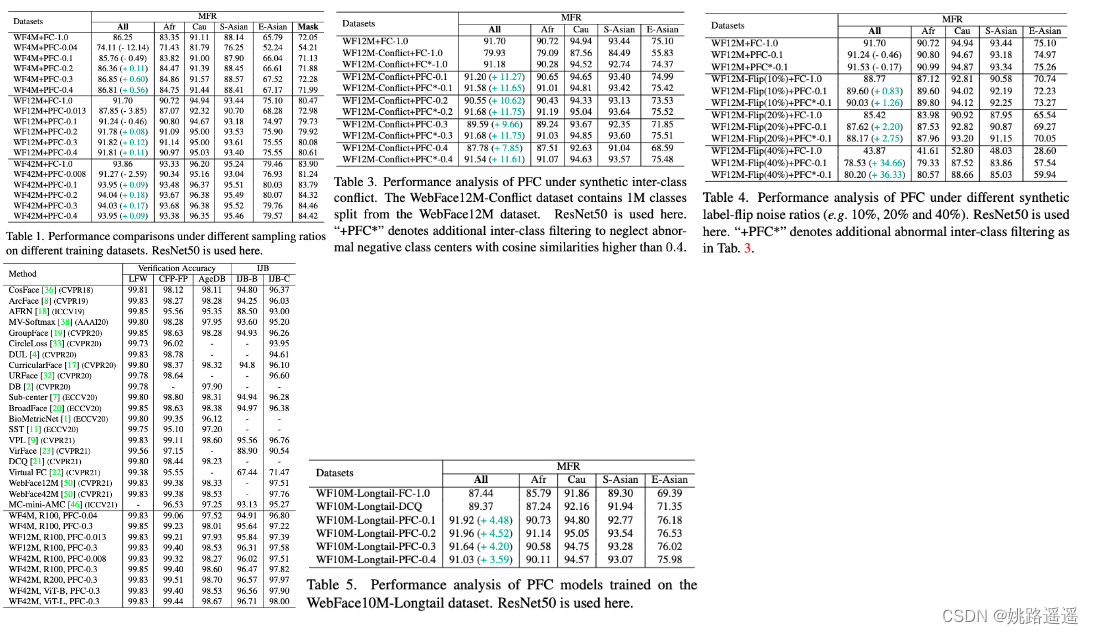
论文题目:”Killing Two Birds with One Stone: Efficient and Robust Training of Face Recognition CNNs by Partial FC“ -CVPR 2022 代码地址:https://arxiv.org/pdf/2203.15565.pdf 代码地址:https://github.com/deepinsight/insightfac…...

递归方法读取任意深度的 JSON 对象的键值
有以下json字符串 {"name":"John","age":30,"address":{"city":"New York","state":"NY","zip":"10001","coordinates":{"latitude":40.712776,&q…...
黑马redis学习记录:分布式锁
一、基本原理和实现方式对比 分布式锁:满足分布式系统或集群模式下多进程可见并且互斥的锁。 分布式锁的核心思想就是让大家都使用同一把锁,只要大家使用的是同一把锁,那么我们就能锁住线程,不让线程进行,让程序串行…...

对React-Fiber的理解,它解决了什么问题?
对React-Fiber的理解,它解决了什么问题?Fiber用来解决什么问题?Fiber是什么?Fiber是如何解决问题的?Fiber用来解决什么问题? JavaScript引擎和页面渲染引擎两个线程是互斥的,当其中一个线程执行…...
【Linux】初学Linux你需要掌握这些基本指令(二)
目录 1.man指令 2.cp指令 3.mv指令 4.tree指令 5.echo指令 6.more指令 7.less指令(重要) 8.head与tail指令 9.date指令 显示时间常用参数: 设置时间常用参数: 10.cal指令 11.find & whereis & which指令 …...

掌握显卡性能调优:NVIDIA Profile Inspector 7个实用技巧
掌握显卡性能调优:NVIDIA Profile Inspector 7个实用技巧 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector NVIDIA Profile Inspector是一款强大的显卡配置工具,能够深度修改NVIDI…...

中国科学技术大学学位论文LaTeX模板ustcthesis:学术写作的终极解决方案
中国科学技术大学学位论文LaTeX模板ustcthesis:学术写作的终极解决方案 【免费下载链接】ustcthesis LaTeX template for USTC thesis 项目地址: https://gitcode.com/gh_mirrors/us/ustcthesis 中国科学技术大学学位论文LaTeX模板ustcthesis是专为中科大师生…...

IPBan快速入门:一键安装配置,立即阻止僵尸网络入侵
IPBan快速入门:一键安装配置,立即阻止僵尸网络入侵 【免费下载链接】IPBan Since 2011, IPBan is the worlds most trusted, free security software to block hackers and botnets. With both Windows and Linux support, IPBan has your dedicated or …...

只狼mod 深红誓约 法环boss分享 剑星解压即鲁版本
mod大全下载地址:https://pan.quark.cn/s/dcc6f9af1537#/list/share/7a4c672d5cc34ddf8ce899a057f361a1 安装方法:https://www.bilibili.com/video/BV13T421r79p/?spm_id_from333.337.search-card.all.click&vd_sourced68ed178f151e80fea1e02efd205802c 剑星解压即鲁版本 …...
)
下载 | Win11 官方精简版,系统占用空间极少!(4月末更新、Win11 IoT物联网 LTSC版、适合老电脑安装使用)
⏩ 【资源A023】Win11 LTSC 2024 ISO系统映像 🔶Win11 物联网IoT LTSC版,默认无TPM等硬件限制,更方便老电脑安装使用。LTSC是长期服务渠道版本,网友俗称“老坛酸菜版”,相当于微软官方的精简版Win11,精简了…...

从LTV-M501到系统集成:高速光耦隔离通信的选型与实战设计
1. 高速光耦隔离通信的核心价值 第一次接触工业现场总线改造项目时,我被电机控制器和PLC之间的通信干扰问题折磨了整整两周。直到老工程师递给我几个LTV-M501光耦,问题才迎刃而解。这种通过光信号传递电信号的器件,就像给通信线路装上了"…...

PCL 方向向量约束的RANSAC拟合平面【2026最新版】
目录 一、算法概述 二、代码实现 三、结果展示 本文由CSDN点云侠原创,博客长期更新,本文最近一次更新时间为:2026年5月10日。 一、算法概述 SampleConsensusModelPerpendicularPlane使用额外的角度约束来定义三维平面分割的模型。平面必须垂直于用户指定的轴(setAxis),直到…...

多模态大语言模型如何优化多机器人系统协同
1. 多模态大语言模型驱动的多机器人系统架构设计多模态大语言模型(MLLM)正在彻底改变多机器人系统的协同工作方式。这种新型架构通过将自然语言理解、多模态感知和分布式决策能力深度融合,使机器人团队能够像人类工作组一样理解复杂指令并自主…...

CANN/ops-nn动态量化RMS归一化融合算子
aclnnAddRmsNormDynamicQuantV2 【免费下载链接】ops-nn 本项目是CANN提供的神经网络类计算算子库,实现网络在NPU上加速计算。 项目地址: https://gitcode.com/cann/ops-nn 📄 查看源码 产品支持情况 产品是否支持Ascend 950PR/Ascend 950DT√A…...

【大模型灰度发布黄金法则】:奇点智能大会首次披露7大避坑指标与实时熔断阈值
更多请点击: https://intelliparadigm.com 第一章:大模型灰度发布策略:奇点智能大会 在2024年奇点智能大会上,多家头部AI企业联合发布了面向生产环境的大模型灰度发布参考架构,强调“可控、可观、可退”三大核心原则。…...