在魔改PLUS-F5280开发板上使用合封qsp iflash
文章目录
- 引言
- 硬件调整
- 软件调整
- 总结
引言
由于目前灵动官网暂未发布正式版的PLUS-F5280开发板,可以使用现有的PLUS-F5270 v1.2开发板(下文简称PLUS-F5270开发版)替换为MM32F5280微控制器芯片,改装为PLUS-F5280开发板。本文记录了使用现有的PLUS-F5270开发板评估MM32F5280微控制器的软硬件调整过程。
硬件调整
PLUS-F5270 开发板上,使用MM32F5270微控制器的qspi接口对接了外置flash存储芯片。PLUS-F5270 板载华邦flash存储芯片的 W25Q64JVSIQ,容量为 8MB (64Mb),3.3V 供电,默认情况下,四线模式处于打开状态。
MM32F5270连接该 QSPI Flash 所使用的引脚号如图1所示:

MM32F5280微控制器芯片,是在MM32F5270微控制器的基础之上,在芯片内部合封了一块2MB容量的flash,合封flash芯片同MM32F5270的die也是通过qspi接口对接。但当前版本的PLUS-F5270开发板外界flash芯片的qspi引脚同MM32F5280合封内部使用的qspi引脚不相同。见表1所示。
| qspi function | PLUS-F5270 pin | MM32F5280 pin |
|---|---|---|
| CS | PB10 | PF6 |
| SCK | PG7 | PG7 |
| D0 | PG6 | PG6 |
| D1 | PA3 | PF8 |
| D2 | PB3 | PF10 |
| D3 | PG8 | PG8 |
MM32F5270微控制器芯片同MM32F5280除了合封qspi接口的引脚未引出,其余引脚完全相同,故改装后的PLUS-F5280可以使用绝大多数原PLUS-F5270开发板的功能,除了少量功能,包括:
- ADC温感、电位器功能将无法使用
- 以太网功能将无法使用(原RMII模式连线已弃用)
软件调整
同时,需要在MindSDK为PLUS-F5270开发的样例工程中,修改pin_init.c文件中引脚复用配置。以spiflash_sfud_qspi工程为例。
原PLUS-F5270工程中的pin_init.c源文件:
void BOARD_InitPins(void)
{.../* PB10 - QSPI_CS. */gpio_init.Pins = GPIO_PIN_10;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &gpio_init);GPIO_PinAFConf(GPIOB, gpio_init.Pins, GPIO_AF_10);/* PG7 - QSPI_SCK. */gpio_init.Pins = GPIO_PIN_7;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &gpio_init);GPIO_PinAFConf(GPIOG, gpio_init.Pins, GPIO_AF_10);/* PG6 - QSPI_IO0. */gpio_init.Pins = GPIO_PIN_6;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &gpio_init);GPIO_PinAFConf(GPIOG, gpio_init.Pins, GPIO_AF_10);/* PA3 - QSPI_IO1. */gpio_init.Pins = GPIO_PIN_3;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &gpio_init);GPIO_PinAFConf(GPIOA, gpio_init.Pins, GPIO_AF_10);/* PB3 - QSPI_IO2. */gpio_init.Pins = GPIO_PIN_3;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &gpio_init);GPIO_PinAFConf(GPIOB, gpio_init.Pins, GPIO_AF_10);/* PG8 - QSPI_IO3. */gpio_init.Pins = GPIO_PIN_8;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &gpio_init);GPIO_PinAFConf(GPIOG, gpio_init.Pins, GPIO_AF_10);
}
魔改PLUS-F5280工程中的pin_init.c源文件:
void BOARD_InitPins(void)
{.../* PF6 - QSPI_CS. */gpio_init.Pins = GPIO_PIN_6;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOF, &gpio_init);GPIO_PinAFConf(GPIOF, gpio_init.Pins, GPIO_AF_10);/* PG7 - QSPI_SCK. */gpio_init.Pins = GPIO_PIN_7;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &gpio_init);GPIO_PinAFConf(GPIOG, gpio_init.Pins, GPIO_AF_10);/* PG6 - QSPI_IO0. */gpio_init.Pins = GPIO_PIN_6;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &gpio_init);GPIO_PinAFConf(GPIOG, gpio_init.Pins, GPIO_AF_10);/* PF8 - QSPI_IO1. */gpio_init.Pins = GPIO_PIN_8;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOF, &gpio_init);GPIO_PinAFConf(GPIOF, gpio_init.Pins, GPIO_AF_10);/* PF10 - QSPI_IO2. */gpio_init.Pins = GPIO_PIN_10;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOF, &gpio_init);GPIO_PinAFConf(GPIOF, gpio_init.Pins, GPIO_AF_10);/* PG8 - QSPI_IO3. */gpio_init.Pins = GPIO_PIN_8;gpio_init.PinMode = GPIO_PinMode_AF_PushPull; //GPIO_PinMode_AF_OpenDraingpio_init.Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &gpio_init);GPIO_PinAFConf(GPIOG, gpio_init.Pins, GPIO_AF_10);
}还要注意,因为新增使用了GPIOF端口,还需要在clock_init.c文件中启用GPIOF端口的总线访问时钟。
void BOARD_InitBootClocks(void)
{CLOCK_ResetToDefault();CLOCK_BootToHSE120MHz();.../* GPIOF. */RCC_EnableAHB1Periphs(RCC_AHB1_PERIPH_GPIOF, true);RCC_ResetAHB1Periphs(RCC_AHB1_PERIPH_GPIOF);...
}
总结
魔改之后,可以使用MindSDK中为PLUS-F5270微控制器提供的软件包(启动代码、驱动程序、样例及演示工程),评估MM32F5280微控制器芯片。
相关文章:
在魔改PLUS-F5280开发板上使用合封qsp iflash
文章目录引言硬件调整软件调整总结引言 由于目前灵动官网暂未发布正式版的PLUS-F5280开发板,可以使用现有的PLUS-F5270 v1.2开发板(下文简称PLUS-F5270开发版)替换为MM32F5280微控制器芯片,改装为PLUS-F5280开发板。本文记录了使…...

uni-app 瀑布流
效果图 一、组件 components/u-myWaterfall.vue <template><view class"u-waterfall"><view id"u-left-column" class"u-column"><slot name"left" :leftList"leftList"></slot></view&…...
| 真题+思路+考点+代码+岗位)
华为OD机试 - 去除多余空格(Python)| 真题+思路+考点+代码+岗位
去除多余空格 题目 去除文本多余空格,但不去除配对单引号之间的多余空格。给出关键词的起始和结束下标,去除多余空格后刷新关键词的起始和结束下标。 条件约束: [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oQABYuJD-1676475739950)(https://…...

MyBatis 二级缓存简单使用步骤
1、二级缓存使用 在 MyBatis 中默认二级缓存是不开启的,如果要使用需手动开启。在 mybatis-config.xml 配置文件中设置 cacheEnabled true ,配置如下: <?xml version"1.0" encoding"UTF-8" ?> <!DOCTYPE c…...

kubeadmin kube-apiserver Exited 始终起不来查因记录
kubeadmin kube-apiserver Exited 始终起不来查因记录 [rootk8s-master01 log]# crictl ps -a CONTAINER IMAGE CREATED STATE NAME ATTEMPT POD ID POD b7af23a98302e …...

论文投稿指南——中文核心期刊推荐(工程材料学)
【前言】 🚀 想发论文怎么办?手把手教你论文如何投稿!那么,首先要搞懂投稿目标——论文期刊 🎄 在期刊论文的分布中,存在一种普遍现象:即对于某一特定的学科或专业来说,少数期刊所含…...
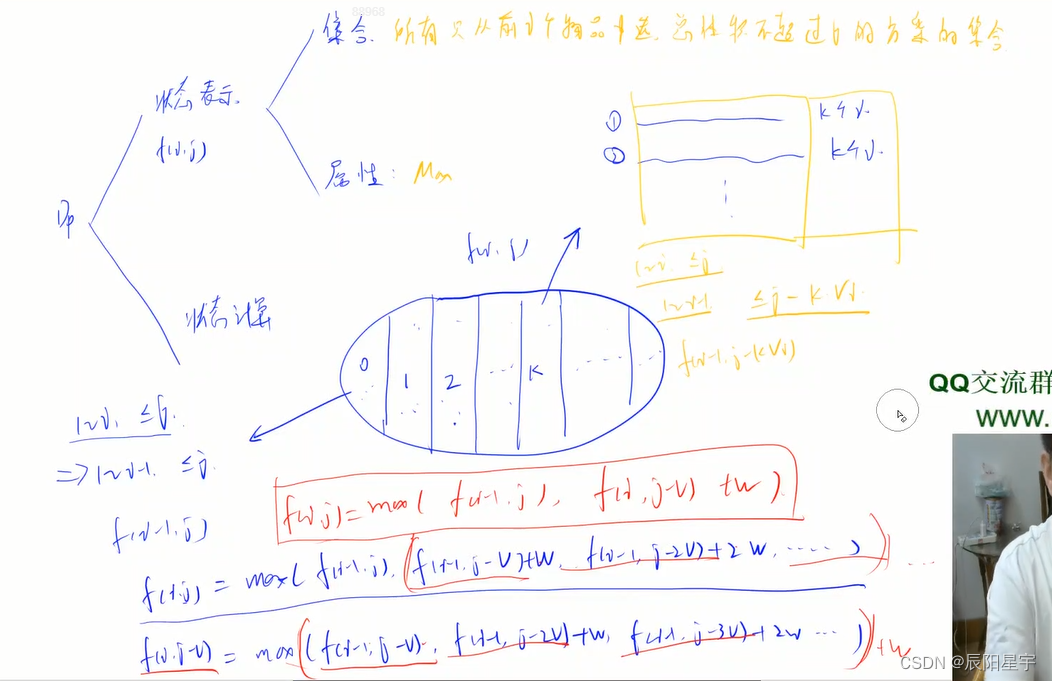
【动态规划】背包问题题型及方法归纳
背包问题的种类 背包问题是在规定背包容量为j的前提下,每个物品对应的体积为v[i],价值为w[i],从物品0到物品i中选择物品放入背包中,找出符合某种要求的价值。 (1)背包问题种类 01背包:每种物…...

全球十大资质正规外汇期货平台排行榜(最新版汇总)
外汇期货简称为FxFut,是“Forex Futures”的缩写,是在集中形式的期货交易所内,交易双方通过公开叫价,以某种非本国货币买进或卖出另一种非本国货币,并签订一个在未来的某一日期根据协议价格交割标准数量外汇的合约。 …...

使用Paramiko时遇到的一些问题
目录 1.背景 2.问题合集 1)“bash: command not found” 2)Paramiko中正常的输入,却到了stderr,而stdout是空 3)命令实际是alias 1.背景 在自动化脚本中,使用了库Paramiko,远程SSH到后台服…...
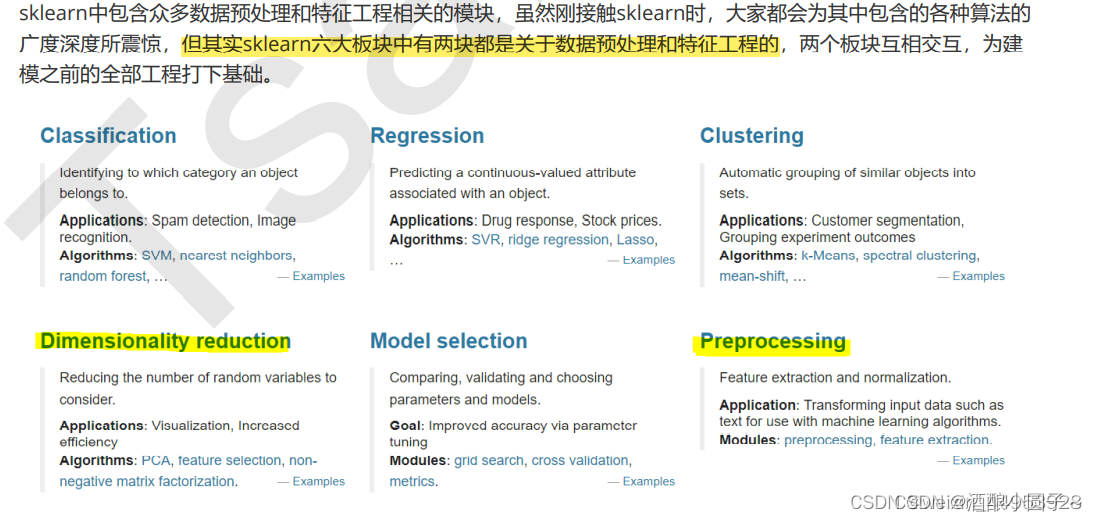
数据预处理(无量纲化、缺失值、分类特征、连续特征)
文章目录1. 无量纲化1.1 sklearn.preprocessing.MinMaxScaler1.2 sklearn.preprocessing.StandardScaler2. 缺失值3. 分类型特征4. 连续型特征数据挖掘的五大流程包括:获取数据数据预处理特征工程建模上线 其中,数据预处理中常用的方法包括数据标准化和归…...

【C#基础】C# 运算符总结
序号系列文章2【C#基础】C# 基础语法解析3【C#基础】C# 数据类型总结4【C#基础】C# 变量和常量的使用文章目录前言运算符1,算术运算符2,布尔逻辑运算符3,位运算符4,关系运算符5,赋值运算符6,其他运算符7&am…...
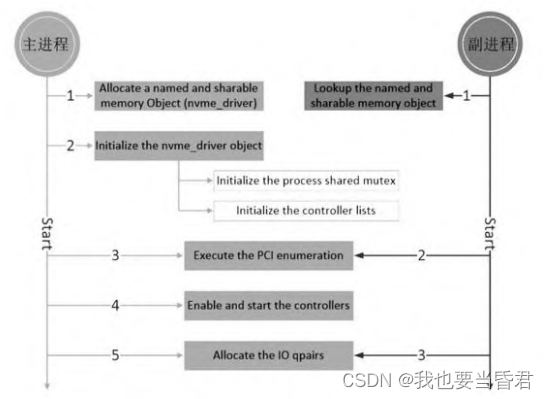
存储性能软件加速库(SPDK)
存储性能软件加速库SPDK存储加速存储性能软件加速库(SPDK)SPDK NVMe驱动1.用户态驱动1)UIO2)VFIOIOMMU(I/O Memory Management Unit)3)用户态DMA4)大页(Hugepage…...

微服务(五)—— 服务注册中心Consul
一、引入依赖 <dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-consul-discovery</artifactId></dependency>二、配置yml文件 server:port: 8006spring:application:name: cloud-payment-con…...
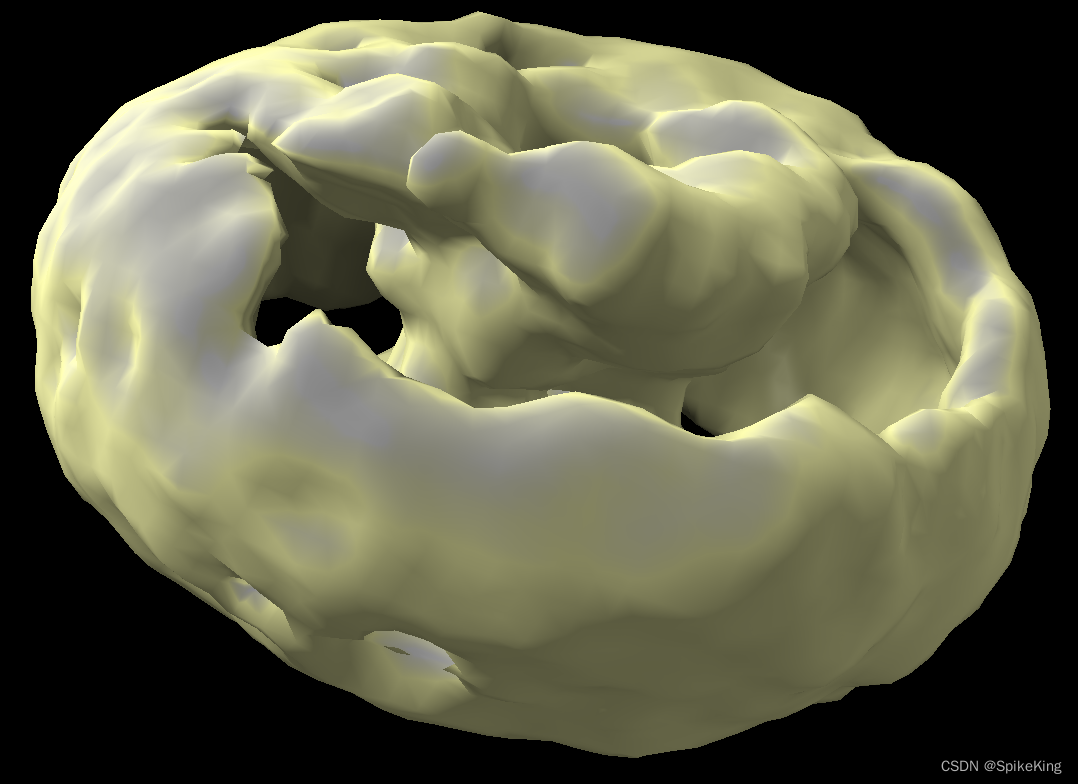
冷冻电镜 - ChimeraX Density Map 密度图 操作
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://blog.csdn.net/caroline_wendy/article/details/129055160 由冷冻电镜所生成的Volume,需要观察其内部结构,使用ChimeraX进行操作。 加载Volumes,例如my_volume.mrc 效果如下: 高斯滤波 在命令行(Co…...

Matlab 点云旋转之轴角式
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 三维空间中表示旋转的方法有很多种,轴角式是其中非常经典的一种表示方式。虽然欧拉角表示旋转的方法很是常用,但欧拉角存在着万向锁这个问题,因此轴角式旋转在旋转使用中更为合适。其原理也很是明了,如下所述:…...
2023美赛数学建模资料思路模型
美赛我们为大家准备了大量的资料,我们会在比赛期间给大家分析美题目和相关的思路 全文都是干货,大家仔细阅读,资料文末自取! 首先我们来看美赛23年题型的一个变化: 美赛23年题目变化: A题:连…...

Nginx配置HTTP强制跳转到HTTPS
https 访问我们的测试域名 https://www.xxx.com 站点,但是当我们直接在浏览器地址栏中直接输入 www.xxx.com 的时候却发现进入的是 http 协议的网站,这与我们的初衷不一致。由于浏览器默认访问域名使用的是80端口,而当我们使用SSL证书后&…...
从实现到原理,聊聊Java中的SPI动态扩展
原创:微信公众号 码农参上,欢迎分享,转载请保留出处。 八股文背多了,相信大家都听说过一个词,SPI扩展。 有的面试官就很喜欢问这个问题,SpringBoot的自动装配是如何实现的? 基本上,…...

3、MySQL字符集
1.MySQL字符集和校验规则 字符集:是一套符号和编码的规则校验规则:是对该套符号和编码的校验,定义字符的排序和比较规则,其中是否区分大小写,跟校验规则有关。2.查看字符集方法 netstat -lntup |grep 3306 tcp6 0 0 :::3306 :::* …...
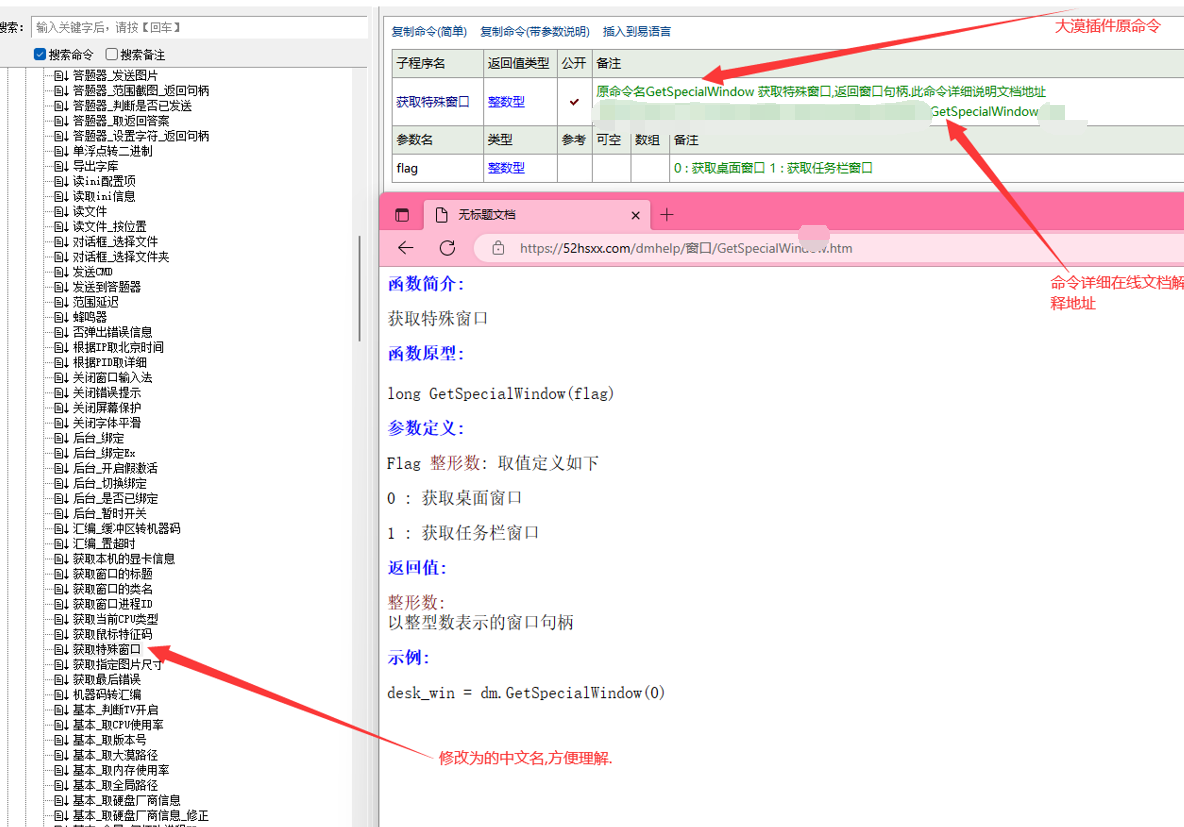
大漠插件最新中文易语言模块7.2302
模块名称:大漠插件中文模块最新通用7.2302模块简介:大漠插件中文模块最新通用7.2302模块特色:原翻译:花老板完善命令备注:易生易世本人花费一个月时间才将命令完善了插件的备注说明.且用且珍惜去掉了大漠插件定制版类.因为没用.模块特色:什么是中文模块?大漠插件模块是由大漠类…...

快速验证汽车电子创意:用快马AI十分钟搭建CAN总线通信原型
在汽车电子和工业控制领域,CAN总线通信是最基础也最重要的技术之一。最近我在做一个车载设备的小项目,需要快速验证CAN通信功能。传统开发方式往往要花大量时间搭建底层驱动,但这次我尝试用InsCode(快马)平台的AI辅助功能,居然十分…...

3分钟终极指南:如何永久冻结IDM试用期实现免费使用
3分钟终极指南:如何永久冻结IDM试用期实现免费使用 【免费下载链接】IDM-Activation-Script IDM Activation & Trail Reset Script 项目地址: https://gitcode.com/gh_mirrors/id/IDM-Activation-Script Internet Download Manager(IDM&#…...

如何轻松获取网页媒体资源?猫抓开源工具让资源提取效率提升3倍
如何轻松获取网页媒体资源?猫抓开源工具让资源提取效率提升3倍 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否曾在浏览网页时遇…...

气象数据可视化实战:从雷达图到三维风场,前端技术栈全解析
气象数据可视化实战:从雷达图到三维风场,前端技术栈全解析 气象数据的可视化一直是前端开发领域最具挑战性的方向之一。想象一下,当你需要将每小时更新的全球气象数据转化为直观的动态图像,让气象学家一眼就能看出台风路径、让飞行…...

AI报告文档审核助力本地化升级:IACheck如何支撑食品加工行业数据安全与质量协同发展
在食品加工行业不断强化质量控制与数据安全要求的背景之下,“本地部署”正逐渐成为企业数字化转型中的关键路径之一,尤其是在涉及检测数据与质量报告的场景中,数据不仅需要具备高度准确性,还必须满足合规与安全要求,因…...

别再被@JsonFormat和@DateTimeFormat搞晕了!SpringBoot中时间处理的完整避坑指南
SpringBoot时间格式化终极指南:从JsonFormat到实战避坑 凌晨三点的办公室,咖啡杯已经见底,屏幕上却再次弹出那个熟悉的400错误——"Failed to parse Date value"。这可能是每个Java开发者在处理时间格式时都经历过的噩梦。时间数据…...
)
Ubuntu 24.04 内核 Kernel Panic 问题排查与解决流程(第二次出现该问题后,永久性解决)
问题描述 系统更新后重启,出现以下错误: Kernel panic - not syncing: VFS: Unable to mount root fs on unknown-block(0,0)系统无法正常启动。问题原因分析 错误含义 内核在启动过程中无法找到并挂载根文件系统。unknown-block(0,0) 表示内核完全不知道…...

新手入门指南:基于快马生成的代码理解设备配对功能实现
今天想和大家分享一个特别适合新手学习的设备配对功能实现案例。这个例子用最基础的HTML、CSS和原生JavaScript就能完成,特别适合刚接触前端开发的朋友理解交互逻辑。 项目结构设计 整个项目分为三个部分:两个模拟设备(用不同图标表示&#x…...

硬件解放:开源工具突破设备限制的深度探索指南
硬件解放:开源工具突破设备限制的深度探索指南 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 当你的设备被厂商贴上"过时"标签&#x…...

基于S7-300与组态王的智能药片装瓶机控制系统优化设计
1. 智能药片装瓶机控制系统的核心价值 在制药生产线上,药片装瓶环节看似简单却暗藏玄机。传统的人工装瓶方式不仅效率低下,还容易出现计数错误、交叉污染等问题。我曾在某药企亲眼见过工人因疲劳导致装瓶数量出错,最终整批药品不得不报废的案…...