FreeRTOS任务相关API函数
任务创建和删除API函数
xTaskCreate()
创建任务。RAM
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, //任务函数const char* const pcName, //任务名字const uint16_t usStackDepth,//任务堆栈大小void * const pvParameters,//传递给任务函数的参数UBaseType_t uxPriority, //任务优先级TaskHandle_t* const pxCreateTask //任务句柄。任务的任务堆栈)
xTaskCreateStatic()
创建任务。RAM
BaseType_t xTaskCreateStatic( TaskFunction_t pxTaskCode, //任务函数const char* const pcName, //任务名字const uint16_t usStackDepth,//任务堆栈大小void * const pvParameters,//传递给任务函数的参数UBaseType_t uxPriority, //任务优先级StackType_t * const puxStackBuffer,//任务堆栈StackType_t * const pxTaskBuffer //任务控制块)
xTaskCreateRestricted()
创建任务。MPU
BaseType_t xTaskCreateRestricted( const TaskParameters_t * const pxTaskDefinition,//一个结构体,描述了任务函数、堆栈大小、优先级等TaskHandle_t * pxCreatedTask //任务句柄)
vTaskDelete()
删除创建的任务。被删除的任务不再存在。用户分配的内存需要用户自行释放掉,不然会导致内存泄漏。
vTaskDelete( TaskHandle_t xTaskToDelete //要删除的任务的句柄)
任务创建和删除实验
实验目的
使用xTaskCreate() 和vTaskDelete()两个函数的使用
实验设计
start_task:用来创建其他两个任务
task1_task:当此任务运行5以后调用删除任务函数删除task2_task,控制LED0的闪烁
task2_task:控制LED1的闪烁,并周期性的刷新LCD指定区域的背景颜色。
main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "timer.h"
#include "timer.h"
#include "lcd.h"
#include "FreeRTOS.h"
#include "task.h"//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);//任务优先级
#define TASK1_TASK_PRIO 2
//任务堆栈大小
#define TASK1_STK_SIZE 128
//任务句柄,任务控制块,包含任务属性的结构体
TaskHandle_t Task1Task_Handler;
//任务函数
void task1_task(void *pvParameters);//任务优先级
#define TASK2_TASK_PRIO 3
//任务堆栈大小
#define TASK2_STK_SIZE 128
//任务句柄
TaskHandle_t Task2Task_Handler;
//任务函数
void task2_task(void *pvParameters);//LCD刷屏时使用的颜色
int lcd_discolor[14]={ WHITE, BLACK, BLUE, BRED, GRED, GBLUE, RED, MAGENTA, GREEN, CYAN, YELLOW,BROWN, BRRED, GRAY };int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4 delay_init(); //延时函数初始化 uart_init(115200); //初始化串口LED_Init(); //初始化LEDLCD_Init(); //初始化LCDPOINT_COLOR = RED;LCD_ShowString(30,10,200,16,16,"ATK STM32F103/F407"); LCD_ShowString(30,30,200,16,16,"FreeRTOS Examp 6-1");LCD_ShowString(30,50,200,16,16,"Task Creat and Del");LCD_ShowString(30,70,200,16,16,"ATOM@ALIENTEK");LCD_ShowString(30,90,200,16,16,"2016/11/25");//创建开始任务xTaskCreate((TaskFunction_t )start_task, //任务函数(const char* )"start_task", //任务名称(uint16_t )START_STK_SIZE, //任务堆栈大小(void* )NULL, //传递给任务函数的参数(UBaseType_t )START_TASK_PRIO, //任务优先级(TaskHandle_t* )&StartTask_Handler); //任务句柄 vTaskStartScheduler(); //开启任务调度
}//开始任务任务函数
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); //进入临界区//创建TASK1任务xTaskCreate((TaskFunction_t )task1_task, (const char* )"task1_task", (uint16_t )TASK1_STK_SIZE, (void* )NULL, (UBaseType_t )TASK1_TASK_PRIO, (TaskHandle_t* )&Task1Task_Handler); //创建TASK2任务xTaskCreate((TaskFunction_t )task2_task, (const char* )"task2_task", (uint16_t )TASK2_STK_SIZE,(void* )NULL,(UBaseType_t )TASK2_TASK_PRIO,(TaskHandle_t* )&Task2Task_Handler); vTaskDelete(StartTask_Handler); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}//task1任务函数
void task1_task(void *pvParameters)
{u8 task1_num=0;POINT_COLOR = BLACK;LCD_DrawRectangle(5,110,115,314); //画一个矩形 LCD_DrawLine(5,130,115,130); //画线POINT_COLOR = BLUE;LCD_ShowString(6,111,110,16,16,"Task1 Run:000");while(1){task1_num++; //任务执1行次数加1 注意task1_num1加到255的时候会清零!!LED0=!LED0;printf("任务1已经执行:%d次\r\n",task1_num);if(task1_num==5) {if(Task2Task_Handler != NULL) //任务2是否存在? {vTaskDelete(Task2Task_Handler); //任务1执行5次删除任务2Task2Task_Handler=NULL; //任务句柄清零printf("任务1删除了任务2!\r\n");}}LCD_Fill(6,131,114,313,lcd_discolor[task1_num%14]); //填充区域LCD_ShowxNum(86,111,task1_num,3,16,0x80); //显示任务执行次数vTaskDelay(1000); //延时1s,也就是1000个时钟节拍 ,调用这个函数会进入阻塞,这样就可以让下一个任务开始了。}
}//task2任务函数
void task2_task(void *pvParameters)
{u8 task2_num=0;POINT_COLOR = BLACK;LCD_DrawRectangle(125,110,234,314); //画一个矩形 LCD_DrawLine(125,130,234,130); //画线POINT_COLOR = BLUE;LCD_ShowString(126,111,110,16,16,"Task2 Run:000");while(1){task2_num++; //任务2执行次数加1 注意task1_num2加到255的时候会清零!!LED1=!LED1;printf("任务2已经执行:%d次\r\n",task2_num);LCD_ShowxNum(206,111,task2_num,3,16,0x80); //显示任务执行次数LCD_Fill(126,131,233,313,lcd_discolor[13-task2_num%14]); //填充区域vTaskDelay(1000); //延时1s,也就是1000个时钟节拍 }
}任务挂起和恢复实验
实验目的
学习使用任务挂起和恢复相关API函数,包括vTaskSuspend(),vTaskResume()和xTaskResumeFromISR()
实验设计
start_task:用来创建其他3个任务。
key_task:按键服务任务。
task1_task:任务1。
task2_task:任务2。
KEY0:中断模式,恢复任务2运行
KEY1:输入模式,恢复任务1运行
KEY2:输入模式,挂起任务2的运行
KEY_UP:输入模式,挂起任务1的运行
main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "timer.h"
#include "lcd.h"
#include "key.h"
#include "exti.h"
#include "FreeRTOS.h"
#include "task.h"//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);//任务优先级
#define KEY_TASK_PRIO 2
//任务堆栈大小
#define KEY_STK_SIZE 128
//任务句柄
TaskHandle_t KeyTask_Handler;
//任务函数
void key_task(void *pvParameters);//任务优先级
#define TASK1_TASK_PRIO 3
//任务堆栈大小
#define TASK1_STK_SIZE 128
//任务句柄
TaskHandle_t Task1Task_Handler;
//任务函数
void task1_task(void *pvParameters);//任务优先级
#define TASK2_TASK_PRIO 4
//任务堆栈大小
#define TASK2_STK_SIZE 128
//任务句柄
TaskHandle_t Task2Task_Handler;
//任务函数
void task2_task(void *pvParameters);//LCD刷屏时使用的颜色
int lcd_discolor[14]={ WHITE, BLACK, BLUE, BRED, GRED, GBLUE, RED, MAGENTA, GREEN, CYAN, YELLOW,BROWN, BRRED, GRAY };int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4 delay_init(); //延时函数初始化 uart_init(115200); //初始化串口LED_Init(); //初始化LEDKEY_Init(); //初始化按键EXTIX_Init(); //初始化外部中断LCD_Init(); //初始化LCDPOINT_COLOR = RED;LCD_ShowString(30,10,200,16,16,"ATK STM32F103/407"); LCD_ShowString(30,30,200,16,16,"FreeRTOS Examp 6-3");LCD_ShowString(30,50,200,16,16,"Task Susp and Resum");LCD_ShowString(30,70,200,16,16,"ATOM@ALIENTEK");LCD_ShowString(30,90,200,16,16,"2016/11/25");//创建开始任务xTaskCreate((TaskFunction_t )start_task, //任务函数(const char* )"start_task", //任务名称(uint16_t )START_STK_SIZE, //任务堆栈大小(void* )NULL, //传递给任务函数的参数(UBaseType_t )START_TASK_PRIO, //任务优先级(TaskHandle_t* )&StartTask_Handler); //任务句柄 vTaskStartScheduler(); //开启任务调度
}//开始任务任务函数
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); //进入临界区//创建KEY任务xTaskCreate((TaskFunction_t )key_task, (const char* )"key_task", (uint16_t )KEY_STK_SIZE, (void* )NULL, (UBaseType_t )KEY_TASK_PRIO, (TaskHandle_t* )&KeyTask_Handler); //创建TASK1任务xTaskCreate((TaskFunction_t )task1_task, (const char* )"task1_task", (uint16_t )TASK1_STK_SIZE, (void* )NULL, (UBaseType_t )TASK1_TASK_PRIO, (TaskHandle_t* )&Task1Task_Handler); //创建TASK2任务xTaskCreate((TaskFunction_t )task2_task, (const char* )"task2_task", (uint16_t )TASK2_STK_SIZE,(void* )NULL,(UBaseType_t )TASK2_TASK_PRIO,(TaskHandle_t* )&Task2Task_Handler); vTaskDelete(StartTask_Handler); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}//key任务函数
void key_task(void *pvParameters)
{u8 key,statflag=0;while(1){key=KEY_Scan(0);switch(key){case WKUP_PRES:statflag=!statflag;if(statflag==1){vTaskSuspend(Task1Task_Handler);//挂起任务printf("挂起任务1的运行!\r\n");}else if(statflag==0){vTaskResume(Task1Task_Handler); //恢复任务1printf("恢复任务1的运行!\r\n");} break;case KEY1_PRES:vTaskSuspend(Task2Task_Handler);//挂起任务2printf("挂起任务2的运行!\r\n");break;}vTaskDelay(10); //延时10ms }
}//task1任务函数
void task1_task(void *pvParameters)
{u8 task1_num=0;POINT_COLOR = BLACK;LCD_DrawRectangle(5,110,115,314); //画一个矩形 LCD_DrawLine(5,130,115,130); //画线POINT_COLOR = BLUE;LCD_ShowString(6,111,110,16,16,"Task1 Run:000");while(1){task1_num++; //任务执1行次数加1 注意task1_num1加到255的时候会清零!!LED0=!LED0;printf("任务1已经执行:%d次\r\n",task1_num);LCD_Fill(6,131,114,313,lcd_discolor[task1_num%14]); //填充区域LCD_ShowxNum(86,111,task1_num,3,16,0x80); //显示任务执行次数vTaskDelay(1000); //延时1s,也就是1000个时钟节拍 }
}//task2任务函数
void task2_task(void *pvParameters)
{u8 task2_num=0;POINT_COLOR = BLACK;LCD_DrawRectangle(125,110,234,314); //画一个矩形 LCD_DrawLine(125,130,234,130); //画线POINT_COLOR = BLUE;LCD_ShowString(126,111,110,16,16,"Task2 Run:000");while(1){task2_num++; //任务2执行次数加1 注意task1_num2加到255的时候会清零!!LED1=!LED1;printf("任务2已经执行:%d次\r\n",task2_num);LCD_ShowxNum(206,111,task2_num,3,16,0x80); //显示任务执行次数LCD_Fill(126,131,233,313,lcd_discolor[13-task2_num%14]); //填充区域vTaskDelay(1000); //延时1s,也就是1000个时钟节拍 }
}相关文章:

FreeRTOS任务相关API函数
任务创建和删除API函数 xTaskCreate() 创建任务。RAM BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, //任务函数const char* const pcName, //任务名字const uint16_t usStackDepth,//任务堆栈大小void * const …...
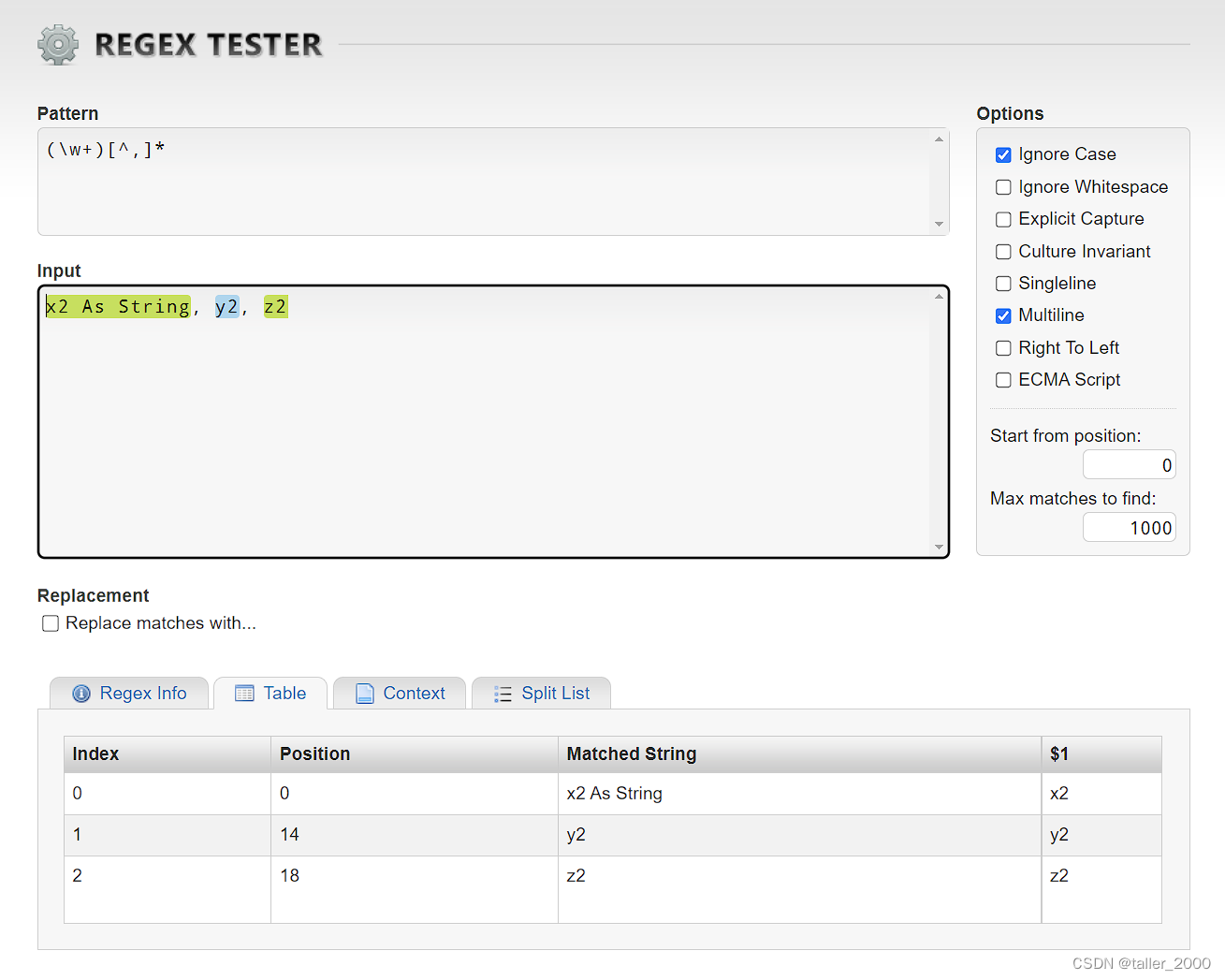
VBA之正则表达式(42)-- 提取代码中变量名称
实例需求:待处理代码段如下所示,现在需要提取其中的变量名称。 Public pFactor As Integer Sub TestCode() Dim reg As New RegExp, a As Workbook Dim ms As VBScript_RegExp_55.MatchCollection Dim m As VBScript_RegExp_55.Match Dim i, j Dim x1, y…...

Unity Lightmapping Setting
如下图: Lightmapper: 使用什么硬件或算法渲染 Progressive CPU、Progressive GPU、Enlighten(新的算放目前用的比较少) 此数值会被用于分别乘以Direct Samples,Indirect Samples和Environment Samples这三个数值。这三个数值会被应用于…...

Android 12.0Camera2 静音时拍照去掉快门声音
1.概述 在12.0定制化开发时,在Camera2静音情况下有快门拍照声音,这就不符合使用规范了 静音的情况下拍照也不应该发出声音,所以在静音拍照流程中要求去掉快门声音 2.Camera2静音拍照去掉快门声音核心代码 Camera2拍照主要代码:/packages/apps/Camera2/src/com/android/cam…...
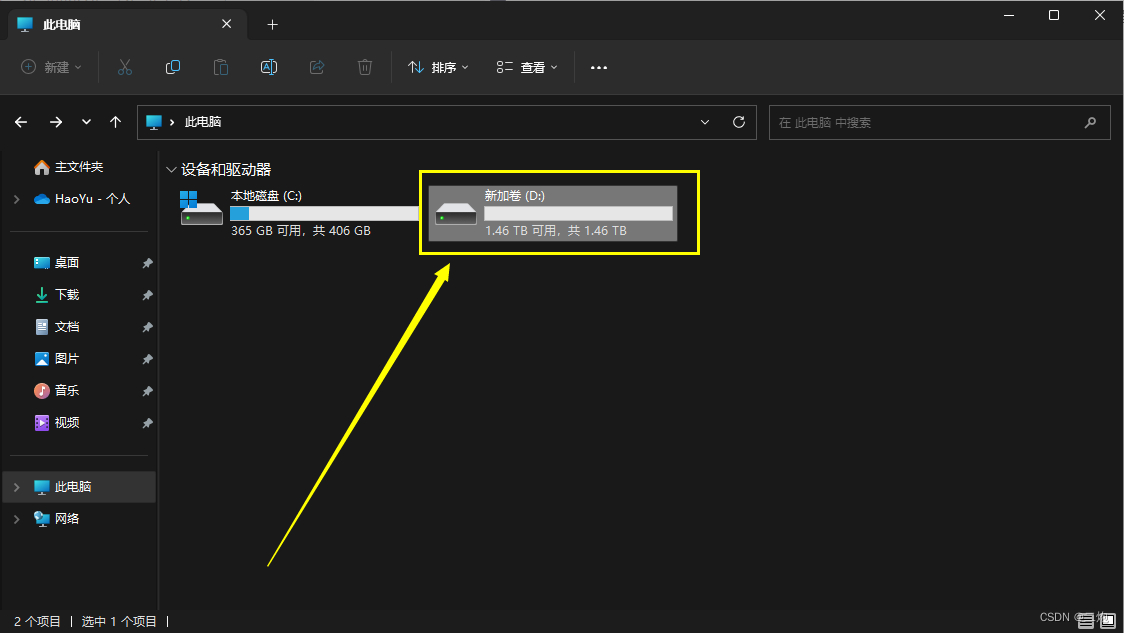
Win11硬盘分区
电脑重装了Win11系统,按WinE打开主文件夹,再点击此电脑,发现: 磁盘只有一个C盘。硬盘的所有空间都在该盘上了,那么我们怎么将其分区呢? Win11硬盘分区步骤: 步骤1: 按WinR输入dis…...

访客管理系统:Lobby Track Crack
Lobbytrack桌面 for 微软视窗 一个强大的、功能齐全的现场访客管理系统解决方案。在本地管理您的数据,网络工作站一起配置访客管理流程的各个方面。 扩展您的系统将本地 Web 模块 添加到您的 Lobbytrack 桌面系统,并允许您的员工使用本地 Intranet 上的 …...

Lidar AI Solution环境配置
目录 Lidar AI Solution环境配置前言1. Lidar AI Solution1.1 Pipeline overview1.2 GetStart 2. CUDA-BEVFusion2.1 3D目标检测(nuScenes验证集)2.2 演示2.3 模型和数据2.4 前置条件2.5 快速开始推理2.5.1 下载模型和数据到CUDA-BEVFusion文件夹2.5.2 配置environment.sh2.5.3…...

子串--子字符串 0528
210102 201012 A1A2…An An…A2A1 如何做, 翻转的是21,因为2>1; 翻转的是210,因为2>0; 翻转的是2101,因为2>1; 翻转的是21010,因为2>0; 翻转的是210102,因为22且1&…...

大数据教程【01.04】--excel的使用
更多信息请关注WX搜索GZH:XiaoBaiGPT Excel中的大数据处理 Excel是一款功能强大的电子表格软件,它广泛用于数据处理和分析。对于大数据处理,Excel提供了多种功能和工具,可以帮助用户处理大量的数据。在本教程中,我们…...

Java输入输出流
目录 一、数据流概念 1.输入输出的概念 2.流的概念 3.流的操作 二、常用的流分类 三、文件输入输出流 1.FileReader和FileWriter 2.FileInputStream和FileOutStream 四、复制文件 一、数据流概念 1.输入输出的概念 输入输出技术用于处理设备之间的数据传输&#x…...

1688商品ID采集一件代发详情页面数据
本篇博文介绍了对1688商品详情API的二次封装,将URL参数封装成Python函数,直接传入参数即可获取搜索结果,例如1688商品标题、价格、一件代发、sku属性和URL等。提供了详细的代码示例和接口调用Demo。 1688.item_get-获得1688商品详情数据 1.请…...
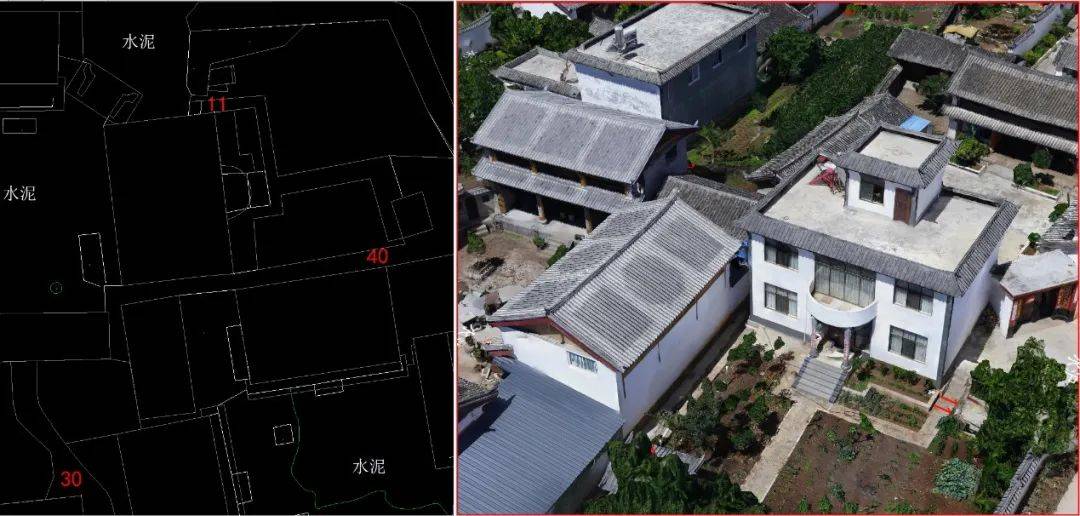
丽江“美丽县城”建设,高精度地籍免像控案例分享
一、项目背景 云南省地矿测绘院于2020年6月承接丽江市玉龙县“美丽县城”建设项目1:500倾斜摄影及地形图测绘项目。项目要求对玉龙县城区及其周边等约30平方公里区域进行优于3CM倾斜摄影测量。 并基于三维模型完成地形高程点、地貌、地物特征点的采集成图…...

我是如何精通软件工程的
软件工程是一个庞大且不断演化的领域,涉及许多创新。虽然如此,大多数技术 —— 如果不是全部 —— 在软件工程中往往最终汇聚为几个基本原则。工程师更好地掌握软件工程的方法是熟悉软件工程的基础知识,而不是那些不断变化的框架、语言或平台…...
如何使用 Python Nornir 实现基于 CLI 的网络自动化?
在现代网络环境中,网络自动化已成为管理和配置网络设备的重要工具。Python Nornir 是一个强大的自动化框架,它提供了一个简单而灵活的方式来执行网络自动化任务。本文将详细介绍如何使用 Python Nornir 实现基于 CLI 的网络自动化。 1. Python Nornir 概…...
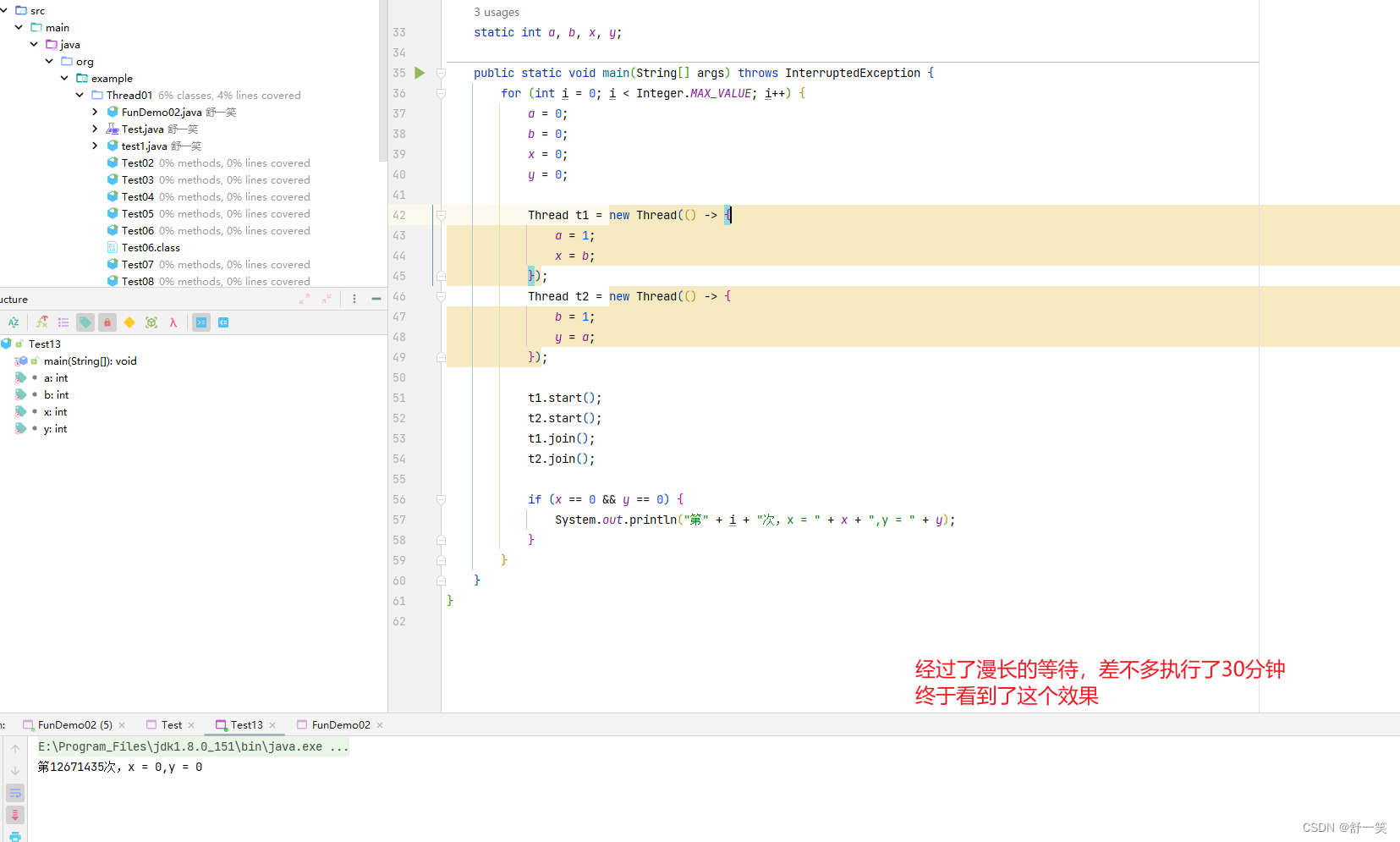
并发编程的三大特性之有序性
有序性的概念 Java文件在被cpu执行前会进行编译成cpu可以执行的指令,为了提高cpu的执行效率会对其中的一些语句进行重排序。Java指令最终是乱序执行的目的是为了提高cpu的执行效率,发挥cpu的性能 单例模式由于指令重排可能会出现上述的问题࿰…...

LeetCode:相交链表(java)
相交链表 题目描述指针法解题 #LeetCode 160题:相交链表,原题链接 原题链接。相交链表–可以打开测试 题目描述 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返…...

利用PHP导出MySQL数据表结构和SQL文件
目录 一、获取数据库所有的数据表 方法一:TP5 方法二:原生PHP 二、导出指定数据表的数据结构 三、 导出SQL文件 四、生成SQL语句 五、完整代码 前端 后端 语言:PHP 数据库:MySQL 功能:分为四部分,① 查出数…...

接口测试框架分析
框架大体上已经写完了,不过说实话好多代码让我自己写我也写不出来,那该怎么办呢?很简单,把现在已经写好的代码保存起来,等用的时候拿出来复制粘贴就好了,如果你是大神,自己会写,那就…...
spring boot日志
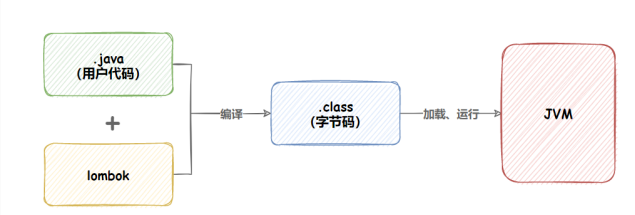
日志介绍日志的使用日志级别日志持久化更简单的输入日志lombok的运行原理 日志介绍 日志的作用: 1:发现问题; 2:定位问题; 3:记录用户的行为:看哪些是方法用户;还能拿到用户的ip&am…...

【Vue2.0源码学习】虚拟DOM篇-Vue中的DOM-更新子节点
文章目录 1. 前言2. 更新子节点3. 创建子节点4. 删除子节点5. 更新子节点6. 移动子节点7. 回到源码8. 总结 1. 前言 在上一篇文章中,我们了解了Vue中的patch过程,即DOM-Diff算法。并且知道了在patch过程中基本会干三件事,分别是:…...

独立游戏开发者如何用Tap广告联盟实现首月变现?我的Unity激励视频接入与调优心得
独立游戏开发者的Tap广告联盟实战指南:从零到首笔收益的完整路径当我在Steam上发布第一款独立游戏时,曾天真地认为"酒香不怕巷子深"。直到账户余额持续三个月停留在两位数,才意识到商业化设计的重要性。作为小型团队,我…...

iOS Frida spawn失败排查:Bundle ID匹配与MobileInstallation缓存解析
1. 这个报错不是App没装,而是Frida根本“看不见”它刚接触iOS逆向的朋友常被这句报错卡住好几天:“Failed to spawn: unable to find application with identifier”。第一反应是——我明明在手机上装了这个App,图标就在主屏,为什…...

祖玛游戏核心原理:状态机驱动的链式消除系统
1. 祖玛游戏的本质:不是“打珠子”,而是状态机驱动的链式消除系统很多人第一次听说要实现祖玛,第一反应是“不就是把彩色球连成三个以上就炸掉吗?”——这个理解对了一半,但恰恰漏掉了祖玛区别于其他消除类游戏的核心骨…...

基于变分自编码器的类星体光谱无监督分析:QUEST工具原理与实践
1. 项目概述与核心价值如果你也和我一样,长期和斯隆数字巡天(SDSS)这类大型巡天项目产生的海量光谱数据打交道,那你一定理解那种感受:面对动辄数十万条光谱,传统的基于模板匹配或人工特征提取的分析方法&am…...
)
手把手教你解锁影驰B360M主板隐藏的fTPM 2.0,绕过限制升级Win11(附BIOS修改避坑指南)
解锁影驰B360M主板fTPM 2.0的完整实战手册当Windows 11的升级提示弹出时,许多使用影驰B360M主板的用户发现自己的设备被系统要求拒之门外——原因很简单:主板BIOS中缺少必要的fTPM 2.0支持选项。这并非硬件不支持,而是厂商在固件层面隐藏了相…...

量子机器学习模拟器性能优化与门层特性解析
1. 量子机器学习模拟器的性能优化之道量子机器学习(QML)作为量子计算与经典机器学习的交叉领域,其核心挑战在于如何高效模拟量子电路的演化过程。传统量子模拟器如PennyLane的default.qubit采用通用方法处理各类量子门操作,未能充分考虑不同门类型的数学…...

TinyML模型压缩实战:SHAP特征选择与非结构化剪枝优化边缘AI检测
1. 项目概述与核心价值在电动汽车充电基础设施(EVCI)的网络安全领域,实时、高效的异常检测是保障系统稳定运行的关键。传统的云端检测方案虽然强大,但面临着网络延迟、数据隐私和持续云端连接依赖等挑战。随着边缘计算和物联网设备…...

反向散射通信:无电池物联网的低功耗革命
1. 反向散射通信技术演进概述十年前,当我第一次在实验室接触到RFID技术时,完全没想到这种简单的无线识别技术会演变成今天这样复杂的通信范式。反向散射通信(Backscatter Communication)已经从最初的射频识别工具,发展…...

昇腾NPU实战:vllm-ascend深度解锁大模型推理新境界
昇腾NPU实战:vllm-ascend深度解锁大模型推理新境界 【免费下载链接】vllm-ascend Community maintained hardware plugin for vLLM on Ascend 项目地址: https://gitcode.com/gh_mirrors/vl/vllm-ascend 在AI推理加速的竞技场上,昇腾NPU正以其独特…...

ARM SME指令集:矩阵运算与数据传输优化指南
1. ARM SME指令集概述 在当今高性能计算领域,向量化和矩阵运算已成为提升计算效率的核心技术。ARM架构通过Scalable Matrix Extension(SME)指令集,为矩阵运算提供了硬件级的支持。SME引入了一种名为ZA tile的新型寄存器结构&#…...