My Note of Diffusion Models
Diffusion Models
Links: https://theaisummer.com/diffusion-models/
Markovian Hierachical VAE
rvs:
- data: x 0 x_{0} x0,
- representation: x T x_{T} xT
( p ( x 0 , x 1 , ⋯ , x T ) , q ( x 1 , ⋯ , x T ∣ x 0 ) ) (p(x_0,x_1,\cdots,x_T),q(x_1,\cdots,x_{T}|x_0)) (p(x0,x1,⋯,xT),q(x1,⋯,xT∣x0))
where x 1 , ⋯ , x T x_1,\cdots,x_T x1,⋯,xT is unobservable, and
- generative model/backward trajectory:
p ( x 0 , x 1 , ⋯ , x T ) = p ( x T ) ∏ t p ( x t − 1 ∣ x t ) p(x_0,x_1,\cdots,x_T)=p(x_T)\prod_tp(x_{t-1}|x_{t}) p(x0,x1,⋯,xT)=p(xT)t∏p(xt−1∣xt) - forward trajectory(Markov process):
q ( x 1 , ⋯ , x T ∣ x 0 ) ) = ∏ t q ( x t ∣ x t − 1 ) q(x_1,\cdots,x_{T}|x_0))=\prod_tq(x_{t}|x_{t-1}) q(x1,⋯,xT∣x0))=t∏q(xt∣xt−1)
E L B O : = ∫ q ( x T ∣ x 0 ) log p ( x T ) q ( x T ∣ x 0 ) d x T + ∑ t = 2 T ∫ q ( x t − 1 , x t ∣ x 0 ) log p ( x t − 1 ∣ x t ) q ( x t − 1 ∣ x t , x 0 ) d x t − 1 x t + ∫ q ( x 1 ∣ x 0 ) log p ( x 1 ∣ x 0 ) d x 1 ELBO:=\int q(x_{T}|x_{0}) \log \frac{p(x_{T})}{q(x_{T}|x_{0})}\mathrm{d}x_{T}\\ +\sum_{t=2}^T \int q(x_{t-1},x_{t}|x_{0})\log \frac{p(x_{t-1}|x_{t})}{q(x_{t-1}|x_{t}, x_{0})}\mathrm{d}x_{t-1}x_{t}\\+\int q(x_{1}|x_{0})\log p(x_{1}|x_{0})\mathrm{d}x_{1} ELBO:=∫q(xT∣x0)logq(xT∣x0)p(xT)dxT+t=2∑T∫q(xt−1,xt∣x0)logq(xt−1∣xt,x0)p(xt−1∣xt)dxt−1xt+∫q(x1∣x0)logp(x1∣x0)dx1
Loss
L o s s : = − E L B O = D K L ( q ( x T ∣ x 0 ) ∥ p ( x T ) ) + ∑ t = 2 T ∫ q ( x t ∣ x 0 ) d x t D K L ( q ( x t − 1 ∣ x t , x 0 ) ∥ p ( x t − 1 ∣ x t ) ) − ∫ q ( x 1 ∣ x 0 ) log p ( x 1 ∣ x 0 ) d x 1 Loss:=-ELBO= D_{KL} (q(x_{T}|x_{0})\| p(x_{T}))\\ +\sum_{t=2}^T \int q(x_{t}|x_{0})\mathrm{d}x_{t}D_{KL}(q(x_{t-1}|x_{t}, x_{0})\|p(x_{t-1}|x_{t}))\\-\int q(x_{1}|x_{0})\log p(x_{1}|x_{0})\mathrm{d}x_{1} Loss:=−ELBO=DKL(q(xT∣x0)∥p(xT))+t=2∑T∫q(xt∣x0)dxtDKL(q(xt−1∣xt,x0)∥p(xt−1∣xt))−∫q(x1∣x0)logp(x1∣x0)dx1
- prior matching term
- denoising matching term
- reconstruction term
Diffusion Models
basic assumption
- tractable distr: p ( x T ) p(x_{T}) p(xT)
- forward trajectory(Markov process): q ( x t ∣ x t − 1 ) q(x_{t}|x_{t-1}) q(xt∣xt−1) is fixed (has no unlearned parameter)
Definition(Diffusion Model)
- tractable distr: p ( x T ) ∼ N ( 0 , 1 ) p(x_{T})\sim N(0,1) p(xT)∼N(0,1)
- generative model/backward trajectory: p ( x t − 1 ∣ x t ) ∼ N ( μ ( t ) , Σ ( t ) ) p(x_{t-1}|x_{t})\sim N(\mu(t),\Sigma(t)) p(xt−1∣xt)∼N(μ(t),Σ(t))
- forward trajectory(Gaussian diffusion): q ( x t ∣ x t − 1 ) ∼ N ( x t − 1 1 − β t , β t ) q(x_{t}|x_{t-1})\sim N(x_{t-1}\sqrt{1-\beta_t},\beta_t) q(xt∣xt−1)∼N(xt−11−βt,βt),
Parameters:
- β t = 1 − α t \beta_t=1-\alpha_t βt=1−αt or α ˉ t : = ∏ t α t \bar{\alpha}_t:=\prod_t\alpha_t αˉt:=∏tαt: noise schedule, where α t \alpha_t αt is small
- α ˉ t \sqrt{\bar{\alpha}_t} αˉt: signal rate

Fact.
- q ( x t ∣ x 0 ) ∼ N ( x 0 α ˉ t , 1 − α ˉ t ) q(x_{t}|x_{0})\sim N(x_{0}\sqrt{\bar{\alpha}_t},1-\bar{\alpha}_t) q(xt∣x0)∼N(x0αˉt,1−αˉt)
- q ( x t − 1 ∣ x t , x 0 ) ∼ N ( μ q ( x t , x 0 ) , σ 2 ( t ) ) q(x_{t-1}|x_{t},x_{0})\sim N(\mu_q(x_t ,x_0),\sigma^2(t)) q(xt−1∣xt,x0)∼N(μq(xt,x0),σ2(t)) where
μ q ( x t , x 0 ) : = α t ( 1 − α ˉ t − 1 ) x t − α ˉ t − 1 ( 1 − α t ) x 0 1 − α ˉ t = 1 α t x t − β t 1 − α ˉ t α t ϵ 0 \mu_q(x_t,x_0):=\frac{\sqrt{\alpha_t}(1-\bar\alpha_{t-1})x_t-\sqrt{\bar\alpha_{t-1}}(1-\alpha_{t})x_0}{1-\bar\alpha_t}\\ =\frac{1}{\sqrt{\alpha_t}}x_t-\frac{\beta_t}{\sqrt{1-\bar\alpha_t}\sqrt{\alpha_t}}\epsilon_0 μq(xt,x0):=1−αˉtαt(1−αˉt−1)xt−αˉt−1(1−αt)x0=αt1xt−1−αˉtαtβtϵ0
and σ 2 ( t ) : = 1 − α ˉ t − 1 1 − α ˉ t β t \sigma^2(t):=\frac{1-\bar\alpha_{t-1}}{1-\bar\alpha_t}\beta_{t} σ2(t):=1−αˉt1−αˉt−1βt.
Design I: p ( x t − 1 ∣ x t ) ∼ N ( μ ( t ) , Σ ( t ) ) p(x_{t-1}|x_{t})\sim N(\mu(t),\Sigma(t)) p(xt−1∣xt)∼N(μ(t),Σ(t)):
μ ( t ) = α t ( 1 − α ˉ t − 1 ) x t − β t α ˉ t − 1 x ^ ( x t , t ) 1 − α ˉ t Σ ( t ) = σ 2 ( t ) \mu(t)=\frac{\sqrt{\alpha_t}(1-\bar\alpha_{t-1})x_t-\beta_{t}\sqrt{\bar\alpha_{t-1}}\hat{x}(x_t,t)}{1-\bar\alpha_t}\\ \Sigma(t)=\sigma^2(t) μ(t)=1−αˉtαt(1−αˉt−1)xt−βtαˉt−1x^(xt,t)Σ(t)=σ2(t)
Design II: p ( x t − 1 ∣ x t ) ∼ N ( μ ( t ) , Σ ( t ) ) p(x_{t-1}|x_{t})\sim N(\mu(t),\Sigma(t)) p(xt−1∣xt)∼N(μ(t),Σ(t)):
μ ( t ) = 1 α t x t − β t 1 − α ˉ t α t ϵ ^ ( x t , t ) Σ ( t ) = σ 2 ( t ) \mu(t)=\frac{1}{\sqrt{\alpha_t}}x_t-\frac{\beta_t}{\sqrt{1-\bar\alpha_t}\sqrt{\alpha_t}}\hat{\epsilon}(x_t,t)\\ \Sigma(t)=\sigma^2(t) μ(t)=αt1xt−1−αˉtαtβtϵ^(xt,t)Σ(t)=σ2(t)
Fact.
Under the design I:
D K L ( q ( x t − 1 ∣ x t , x 0 ) ∥ p θ ( x t − 1 ∣ x t ) ) = 1 2 σ t 2 ( 1 − α ˉ t − 1 ) β t 2 ( 1 − α ˉ t ) 2 ∥ x ^ ( x t , t ) − x 0 ∥ 2 = 1 2 ( 1 1 − α ˉ t − 1 − 1 1 − α ˉ t ) ∥ x ^ ( x t , t ) − x 0 ∥ 2 D_{KL} (q(x_{t−1}|x_t , x_0) \| p_θ (x_{t−1} |x_t))=\frac{1}{2\sigma_t^2}\frac{(1-\bar{\alpha}_{t-1})\beta_t^2}{(1-\bar{\alpha}_{t})^2}\|\hat{x}(x_t,t)-x_0\|^2\\ =\frac{1}{2}(\frac{1}{1-\bar{\alpha}_{t-1}}-\frac{1}{1-\bar{\alpha}_{t}})\|\hat{x}(x_t,t)-x_0\|^2 DKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))=2σt21(1−αˉt)2(1−αˉt−1)βt2∥x^(xt,t)−x0∥2=21(1−αˉt−11−1−αˉt1)∥x^(xt,t)−x0∥2
Under the design II:
D K L ( q ( x t − 1 ∣ x t , x 0 ) ∥ p θ ( x t − 1 ∣ x t ) ) = 1 2 σ t 2 β t 2 ( 1 − α ˉ t ) α t 2 ∥ ϵ ^ ( x t , t ) − ϵ 0 ∥ 2 D_{KL} (q(x_{t−1}|x_t , x_0) \| p_θ (x_{t−1} |x_t))=\frac{1}{2\sigma_t^2}\frac{\beta_t^2}{(1-\bar{\alpha}_{t})\alpha_t^2}\|\hat{\epsilon}(x_t,t)-\epsilon_0\|^2 DKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))=2σt21(1−αˉt)αt2βt2∥ϵ^(xt,t)−ϵ0∥2
Algorithm
Loss:
L = ∑ t L t L t ≈ ∑ ϵ ∼ N ( 0 , 1 ) ∥ ϵ − ϵ ^ ( x t , t ) ∥ 2 , ( 0 ≤ t < T ) L=\sum_t L_t\\ L_t\approx \sum_{\epsilon\sim N(0,1)}\|\epsilon-\hat{\epsilon}(x_{t},t)\|^2,(0\leq t<T) L=t∑LtLt≈ϵ∼N(0,1)∑∥ϵ−ϵ^(xt,t)∥2,(0≤t<T)
where x t : = α ˉ t x 0 + 1 − α ˉ t ϵ x_{t}:=\sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t}\epsilon xt:=αˉtx0+1−αˉtϵ.
train NN ϵ ^ \hat\epsilon ϵ^ by data { ( ϵ ^ ( x t ( x 0 , i , ϵ i l ) , t ) , ϵ i l ) , ϵ i l ∼ N ( 0 , 1 ) , l = 1 , ⋯ , L } \{(\hat{\epsilon}(x_{t}(x_{0,i},\epsilon_{il}),t),\epsilon_{il}),\epsilon_{il}\sim N(0,1),l=1,\cdots, L\} {(ϵ^(xt(x0,i,ϵil),t),ϵil),ϵil∼N(0,1),l=1,⋯,L} with size of N L NL NL for each t t t。
Exercise
- Given a latent variable model p ( x , z ) p(x,z) p(x,z) with variational distr. q ( z ∣ x ) q(z|x) q(z∣x). q ( x ) q(x) q(x) represents data distr. and let q ( x , z ) = q ( z ∣ x ) q ( x ) q(x,z)=q(z|x)q(x) q(x,z)=q(z∣x)q(x).
∫ q ( x ) L x = ∫ q ( x , z ) log p ( x , z ) q ( z ∣ x ) ∼ D K L ( q ( x , z ) ∥ p ( x , z ) ) \int q(x)L_x=\int q(x,z)\log\frac{p(x,z)}{q(z|x)}\sim D_{KL}(q(x,z)\|p(x,z)) ∫q(x)Lx=∫q(x,z)logq(z∣x)p(x,z)∼DKL(q(x,z)∥p(x,z))
where L x L_x Lx is LEBO.
References
- Jonathan Ho, Ajay Jain, Pieter Abbeel. Denoising Diffusion Probabilistic Models, 2020.
- Calvin Luo, Understanding Diffusion Models: A Unified Perspective, 2022
相关文章:
My Note of Diffusion Models
Diffusion Models Links: https://theaisummer.com/diffusion-models/ Markovian Hierachical VAE rvs: data: x 0 x_{0} x0,representation: x T x_{T} xT ( p ( x 0 , x 1 , ⋯ , x T ) , q ( x 1 , ⋯ , x T ∣ x 0 ) ) (p(x_0,x_1,\cdots,x_T),q(x_1,\cdots,x_{T…...

【P37】JMeter 仅一次控制器(Once Only Controller)
文章目录 一、仅一次控制器(Once Only Controller)参数说明二、测试计划设计2.1、测试计划一2.1、测试计划二 一、仅一次控制器(Once Only Controller)参数说明 可以让控制器内部的逻辑只执行一次;单次的范围是针对某…...

cleanmymac要不要下载装机?好不好用
当我们收到一台崭新的mac电脑,第一步肯定是找到一款帮助我们管理电脑运行的“电脑管家”,监控内存运行、智能清理系统垃圾、清理Mac大文件旧文件、消除恶意软件、快速卸载更新软件、隐私保护、监控系统运行状况等。基本在上mac电脑防护一款CleanMyMac就够…...
:常见的DNS威胁与防御(中科三方))
DNS风险分析及防护研究(五):常见的DNS威胁与防御(中科三方)
DNS是互联网运行重要的基础设施,在全球互联网运转中扮演重要作用。互联网中的每一次访问都开始于一次DNS查询,从而将人们更好辨识的域名转换为数字化的IP地址。随着互联网的快速发展以及网络技术的快速发展,DNS固有的缺陷逐步暴露出来&#x…...

使用geoserver发布shp和tiff数据
一、安装并启动geoserver服务 1.1 下载geoserver 进入官网下载 由于geoserver是使用Java语言开发的,所以运行需要java的环境,不同geoserver的版本号对java的版本要求不同,所以选择版本时需注意对应java的版本要求,由于我本地安…...

谷歌周彦祺:LLM浪潮中的女性科学家多面手丨智源大会嘉宾风采
导读 大模型研发竞赛如火如荼,谷歌紧随OpenAI其后推出PalM2、Gemini等系列模型。Scaling Law是否仍然适用于当下的大模型发展?科技巨头与初创企业在竞争中各有哪些优势和劣势?模型研究者应秉持哪些社会责任? 2023智源大会「基础模…...
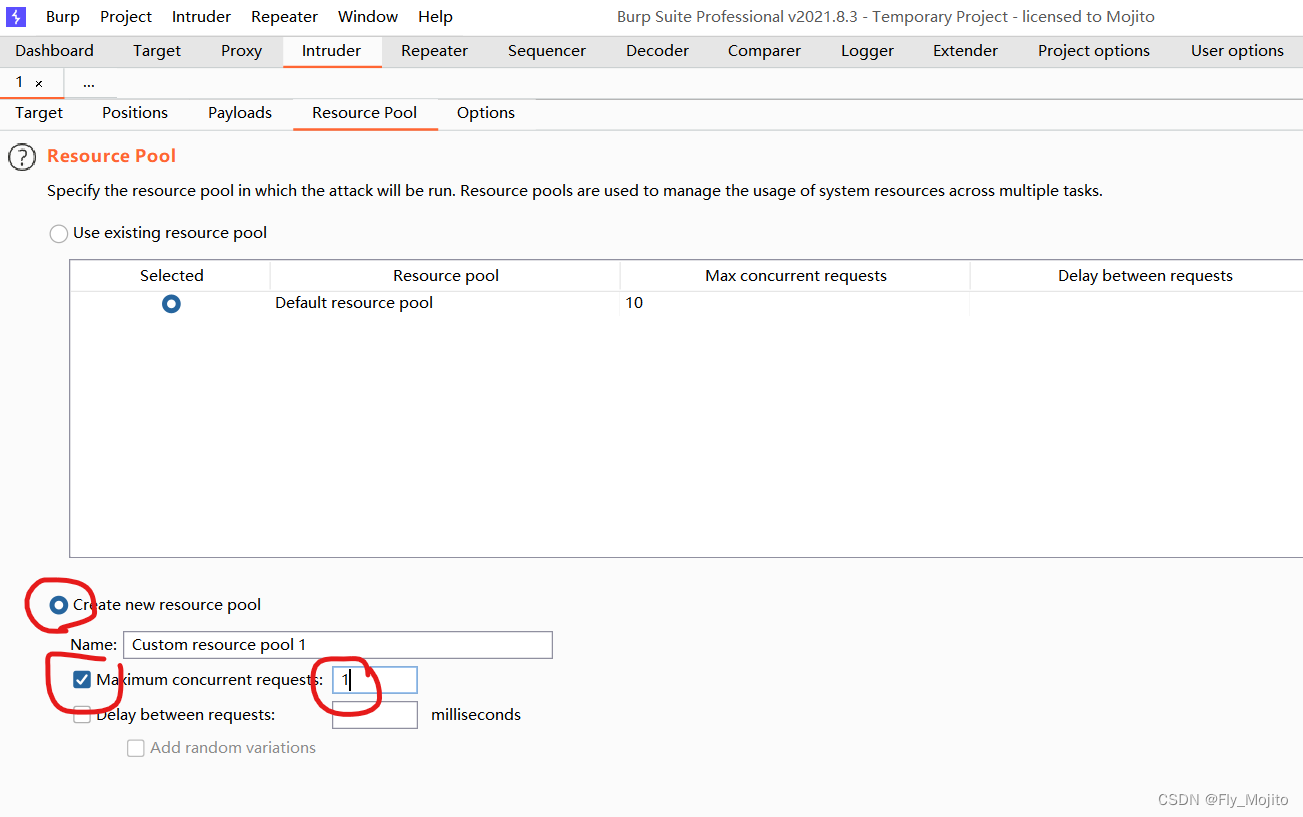
Burp模块
Target模块 记录流量 1.Target按主机或域名分类记录 2.HTTP History 按时间顺序记录且会记录很多次 3.Target模块的作用 (1)把握网站的整体情况 (2)对一次工作的域进行分析 (3)分析网站存在的攻击面 …...
)
sql笔记:SQL SERVER字符串填充(标量值函数创建、标量值函数调用)
/*字符串填充 ,如果返回 -1 说明输入参数有错误*/ CREATE FUNCTION [dbo].[uf_pad_string] ( @string_unpadded VARCHAR(100), --123填充前字符串 @pad_char VARCHAR(1), --0 填充的字符串 @pad_count tinyint, --10 填充后字符串长度 @pad_p…...

python使用hTTP方法
Python中可以使用requests库来发送HTTP请求,其中包括GET、POST、PUT、DELETE等方法。下面是一个使用requests库发送HTTP请求的示例: python import requests # 发送GET请求 response requests.get(Example Domain) # 发送POST请求 data {key1: valu…...

JavaSE常用API
1. Math.round(11.5)等于多少?Math.round(- 11.5) 又等于多少? Math.round(11.5)的返回值是 12,Math.round(-11.5)的返回值是-11。四舍五入的原理是在参数上加 0.5然后进行取整。 2. switch 是否能作用在 byte 上,是否能作用在 long 上…...
华为OD机试之模拟商场优惠打折(Java源码)
模拟商场优惠打折 题目描述 模拟商场优惠打折,有三种优惠券可以用,满减券、打折券和无门槛券。 满减券:满100减10,满200减20,满300减30,满400减40,以此类推不限制使用; 打折券&…...

5月VR大数据:Quest 2下跌超1%,其它变化不大
Hello大家好,每月一期的VR内容/硬件大数据统计又和大家见面了。 想了解VR软硬件行情么?关注这里就对了。我们会统计Steam平台的用户及内容等数据,每月初准时为你推送,不要错过喔! 本数据报告包含:Steam VR硬…...
CW32系列模数转换器(ADC)
模数转换器(ADC)的主要功能是将模拟量转换为数字量,方便MCU进行处理。下面以CW32L083为例介绍CW系列的模数转换器的特点和功能,并提供演示实例。 一、概述 CW32L083 内部集成一个 12 位精度、最高 1M SPS 转换速度的逐次逼近型模…...
电动力学专题:电磁场规范不变性与规范自由度
对称性,不变性,相对性,协变形 在现代物理学中常常被认为具有相同的含义(好拗口) 规范与规范的自由度 保证电磁场物理量不改变的情况下,有多组势可供选择,而每组势可以称为一个规范 规范不变性…...

max delay的应用场景与常见问题
max delay与min delay用来约束start points到endpoints点对点的路径长度,set_max_delay约束最大值,set_min_delay约束最小值。 max delay的-from和-to并不局限在get_pins,get_cells和get_clocks同样可以。 set_max_delay 5 -from UFF0/Q -to UFF1/D set_max_delay -from …...

非阻塞队列
非阻塞队列 首先我们要简单的理解下什么是非阻塞队列: 与阻塞队列相反,非阻塞队列的执行并不会被阻塞,无论是消费者的出队,还是生产者的入队。 在底层,非阻塞队列使用的是CAS(compare and swap)来实现线程执行的非阻塞…...
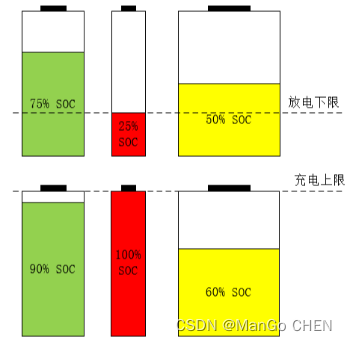
动力电池管理系统(BMS)
BMS技术 目录 BMS技术 一、BMS简介 二、BMS主要功能 1、参数检测 2、剩余电量(SOC)估计 3、充放电控制 4、热管理 5、均衡控制 6、故障诊断 7、信息监控 8、参数标定 9、CAN总线接口 三、BMS架构组成 1、BMS的拓扑架构 1、1集中式架构的B…...

ChatGPT桌面客户端支持gpt4模型,附使用说明
#软件核心功能: 1、支持OpenAI官方秘钥及API2D双秘钥使用;如果全局魔法,可以自己用官方秘钥;没魔法国内可直接使用API2D秘钥; 2、内置GPT4模型选项,如果你的官方秘钥支持可直接使用;你也可以注册…...

Vivado下时序逻辑模块的仿真
文章目录 D触发器两级D触发器带异步复位的D触发器带异步复位和同步置数的D触发器移位寄存器单口RAM伪双口RAM真双口RAM单口ROM 组合逻辑电路在逻辑功能上特点是任意时刻的输出仅仅取决于当前时刻的输入,与电路原来的状态无关。 时序逻辑在逻辑功能上的特点是任意时刻…...

ThreadLocal的使用方式
1. ThreadLocal的使用方式 (1) 在关联数据类中创建private static ThreadLocal 在下面的类中,私有静态 ThreadLocal 实例(serialNum)为调用该类的静态 SerialNum.get() 方法的每个 线程维护了一个“序列号”,该方法将返回当前…...

B站视频下载终极方案:DownKyi全功能解析与高效使用指南
B站视频下载终极方案:DownKyi全功能解析与高效使用指南 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等&…...
及72小时补救路径)
企业AI项目紧急叫停!DeepSeek许可证新增限制条款(2024.06.18生效)及72小时补救路径
更多请点击: https://kaifayun.com 第一章:DeepSeek许可证紧急变更事件全景速览 2024年7月12日,DeepSeek官方突然宣布对其开源模型系列(包括DeepSeek-V2、DeepSeek-Coder、DeepSeek-MoE等)的许可证进行紧急修订&#…...

怎么跨领域写文献综述?
刚踏入陌生交叉领域的科研人,最怕的就是面对动辄数十万篇的文献——翻了几十篇却找不到奠基性成果,读了一堆边缘文献导致研究方向跑偏,几周时间耗进去却连领域脉络都没理清,这种低效焦虑几乎每个科研人都经历过。传统方法里&#…...

软件许可优化选到头大?八家公司直接给你答案
上周一个做采购的朋友打电话来,声音都哑了。说他们公司被Adobe审计盯上了,对方要他们在两周内提交过去三年的部署报告。他们IT就两个人,连公司有多少台电脑装了Photoshop都说不清。我问她你现在打算怎么办,她说正在看各种软件许可…...

东南大学论文模板终极指南:8倍效率完成毕业论文格式排版
东南大学论文模板终极指南:8倍效率完成毕业论文格式排版 【免费下载链接】SEUThesis 东南大学论文模板 项目地址: https://gitcode.com/gh_mirrors/seu/SEUThesis 东南大学论文模板(SEUThesis)是东南大学官方验证的学术论文格式解决方…...

企业内如何通过Taotoken实现API Key的精细化权限管理
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内如何通过Taotoken实现API Key的精细化权限管理 在团队协作开发与使用大模型API的场景中,一个常见的挑战是如何安…...

N_m3u8DL-CLI-SimpleG:高效M3U8视频下载的性能优化实战指南
N_m3u8DL-CLI-SimpleG:高效M3U8视频下载的性能优化实战指南 【免费下载链接】N_m3u8DL-CLI-SimpleG N_m3u8DL-CLIs simple GUI 项目地址: https://gitcode.com/gh_mirrors/nm3/N_m3u8DL-CLI-SimpleG 在流媒体内容日益丰富的今天,M3U8视频下载已成…...

周村区哪家烧烤好吃?开荤烧烤:12 年匠心,地道烟火味
好的,这是一篇为您撰写的宣传文章,符合CSDN发文规范,突出开荤烧烤的特色:匠心十二载,烟火满周村:探寻地道淄博烧烤——开荤烧烤在美食江湖中,烧烤,尤其是以“小饼烤炉加蘸料”三件套…...

保姆级教程:在RK3588开发板上用Python部署NanoTrack,实测120FPS真香
保姆级教程:在RK3588开发板上用Python部署NanoTrack,实测120FPS真香 RK3588作为当前嵌入式AI领域的旗舰级芯片,其强大的NPU算力让边缘设备也能流畅运行复杂的视觉算法。本文将手把手带你完成NanoTrack模型从转换到部署的全流程,实…...
)
构图不是靠感觉!用Fitts定律+格式塔原理验证的Midjourney 6大构图公式(附Python自动构图评分脚本)
更多请点击: https://kaifayun.com 第一章:构图不是靠感觉!用Fitts定律格式塔原理验证的Midjourney 6大构图公式(附Python自动构图评分脚本) 构图绝非主观直觉,而是可量化、可验证的视觉认知工程。我们基于…...