法规标准-UN R158标准解读
UN R158是做什么的?
UN R158全名为针对驾驶员识别车辆后方弱势道路使用者,联合国对倒车系统和机动车的统一规定,该法规涉及批准倒车和机动车辆的装置,主要为保证倒车时避免碰撞,方便驾驶员观察了解车辆后部人员和物体
倒车系统配置
在后退事件期间,至少向驾驶员提供一种视觉或感知的方式
——视觉方式有:
a) 直接视野
b) 符合UN R-46规定的设备
c) 符合本法规的近距离后视镜
d) 符合本法规的后视摄像头系统
——感知方式有:
a) 符合本法规的探测系统
近距离后视野

水平范围
a) 通过车辆尾部最外点后0.3m处的横向垂直面;
b) 通过车辆尾部最外点后3.5m处的横向垂直面;
c) 与通过车辆两侧最外点纵向垂直中面平行的两个纵向垂直面。
视场高度
视场高度定义为视场边界内的9个位置,测试对象高度为0.8m,直径为0.3m,位于地平线
a) 对于最靠近测试车辆第一排的测试对象 (测试对象A, B和C),每个测试对象上至少能观察到其中一个可见的0.15 m x 0.15 m的区域或试验对象的顶部
b) 对于第二排测试对象 (测试对象D, E和F) 和第三排 (测试对象G, H和I): 全部试验对象应被看见
探测区域

a) 经过车辆尾部最外点后0.2m点的横向垂面;
b) 经过车辆尾部最外点后1m点的横向垂面;
c) 与经过车辆两侧最外点的纵向垂直中面平行的2个纵向垂面。
功能要求
系统就绪
1.系统无法运行应被驾驶员识别(例如通过预警指示、显示信息、黑屏、缺少状态指示来表示RVCS系统故障),向驾驶员提供的信息应由操作手册予以解释
系统激活
1.当后退时间开始时,系统应当激活。如果无法正常运行,系统应自动关闭或由驾驶员应当能够手动关闭
2.只要车辆处于倒挡,系统应当保持激活
3.在车辆检测到耦合装置时,系统可以被关闭
默认视野
1.默认情况下后视摄像头(RVCS)系统应至少展示近距离后视野所示区域;
2.在每次后退事件开始,RVCS系统都默认显示后视图,忽略驾驶员之前对视图的任何更改
目标尺寸
1.最后一排的全部3个试验对象平均值应不少于5弧分;相关计算参考【测试方法-目标尺寸】
2.每个单独试验对象不应少于3弧分
响应时间
1.后视图要求在后退事件开始后2秒内显示
所需视野内的覆盖要求
1.覆盖应仅显示向后行驶有关的视觉信息或安全相关的信息。在所需视野内出于其他目的的覆盖信息是不允许的
2.只有当驾驶员需要启动向后行驶有关的功能或安全相关的功能(例如清洁透镜或启动拖车挂钩观察)或在这种环境下要求特定信息时,允许手动启动覆盖。驾驶员也可以选择关闭覆盖
自动视角切换
1.当有碰撞风险时,视角可改变并聚焦于碰撞区域。应向监测机构证明这种视角改变提高安全性
2.当车辆非直线行驶,视野可根据车辆轨迹变化
系统关闭
1.在后退事件期间后方视野图像应保持可见,直到驾驶员改变视角或车辆不再处于R挡
2.改变视角指切换到任意其他摄像头的视角
3.当车辆不再向后运动时,可手动关闭视角
4.当车辆检测到牵引拖挂装置的耦合动作,系统可以被关闭
驾驶员界面和信息显示策略
1.系统应至少具有从声学、光学和触觉中选择的两种信息信号
2.只要有一个信息信号保持开启,驾驶员可以关闭其他的信息信号
3.声学信息:
——当在车辆后方水平区域内检测到目标物时,且车辆位于倒车挡位,应发出符合ISO 15006:2011的声学提示
——在呈现声学信息时,可以分为二级或者更多级来提示;可以通过改变间歇声音的频率来指示这些通过等级(距离)和检测宽度区分的区域,并且随着距离的接近,应使用更快的间歇声音或连续声音
4.信号持续时间:
——只要探测到目标,目标信号就应持续发出,当不再探测到目标或当系统关闭时,目标信号应当终止。
——为减少驾驶员不适,在系统保持开启的前提下,在经过制造商设定的某个时间后,声学信号可自动暂停。如果当声学信号自动暂停时与目标间的距离变短,声学信号应自动恢复。如果与目标间的距离变长,声音信号可保持暂停状态
5.光学信息:
——在光学信息被置于用于其他信息的显示器(例如仪表组显示或其他显示)的情况下,允许覆盖叠加,并且应当满足【所需视野内的覆盖要求】
6.响应时间:
——在后退事件开始后最大0.6s内至少有一个声学或触觉信息信号发送给驾驶员
试验方法
近距离后视野试验方法
试验目标

每个试验目标应为高0.8m,外径0.3m的正圆柱体。每个试验目标应按照如下进行标记:
a) 试验目标应有一块0.15 m x 0.15 m的涂漆补丁可以从圆柱体侧面的底部移动到顶部。
b) 涂漆补丁的颜色应与圆柱体其余部分及测试路面形成鲜明对比。
试验目标的位置和方向

试验目标按照a)到h)中定义的位置进行放置,如图B所示。根据图B展示俯视视角,测量试验目标圆柱中心轴之间的距离。每个试验目标应安放使其轴线垂直
a) 放置试验目标A、B和C使其中心位于距离与车辆最后端表面相切的横向垂直平面0.3m的横向垂直平面上
b) 放置试验目标B使其中心位于通过车辆纵向中心线的纵向垂直平面内
c) 放置试验目标D、E和F使其中心位于距离与车辆最后端表面相切的横向垂直平面1.5m的横向垂直平面上
d) 放置试验目标E使其中心位于通过车辆纵向中心线的纵向垂直平面内
e) 放置试验目标G、H和I使其中心位于距离与车辆最后端表面相切的横向垂直平面3.5m的横向垂直平面上
f) 放置试验目标H使其中心位于通过车辆纵向中心线的纵向垂直平面内
g) 放置试验目标A、D和G使其最外侧处于与车辆左侧最外表面相切的纵向垂直平面内
h) 放置试验目标C、F和I使其最外侧处于与车辆右侧最外表面相切的纵向垂直平面内
试验条件
1.照明:进行测试的环境照明条件包括从上方均匀分布的灯光,强度在7,000 lux 和10,000 lux之间,在车顶外表面的中心处测量
2.温度:试验期间车辆内部温度介于15 °C和25 °C之间
3.车辆条件:
——轮胎:车辆轮胎设定为车辆制造商推荐的冷充气压力
——车辆负载:车辆处于有关车辆制造的联合决议定义的行驶状态
——可调节悬架:如果车辆装备可调节悬架,它应被设置为最恶劣条件
——后舱盖和行李箱盖:如果车辆装备后舱盖或行李箱盖,它们应在正常车辆运行条件下关闭和锁定
试验程序
1.每个立柱的可见性应逐一测试
2.作为备选,一排立柱可以同时测试。在成功识别立柱后,该立柱可移除
3.第一排立柱(A, B, C)可旋转方向使其涂漆补丁尽可能可见。
系统可用性试验方法
试验条件
1.车辆应保持泊车完成状态,直到确保所有电子系统关闭;或至少泊车30分钟。
2.允许试验人员或设备位于车辆内
3. 确保车辆挡位处于空挡或前进档
4.试验可从打开驾驶员侧车门开始,一旦车门打开,它应当再次关闭
试验程序
1.将车辆设定为主动车辆模式。该动作应初始化/启动第一个计时器
2. 等待至少6s
3. 通过选择倒车模式开始后退事件。如果将车辆设定为主动车辆模式6s后不能将车辆设定为倒车模式,后退事件应在技术上尽快开始。
4. 根据制造商的定义初始化/启动第二个计时器,且不迟于挂入倒车模式或倒车挡位
5. 记录第二个计时器的响应时间,直到后视野在显示屏上完全可见
目标尺寸试验方法

试验参考点
1.如图C所示前视眼睛的中心定位(Mf),使其位于H点垂直上方635mm,H点后方96mm处。
2.如图C所示头/颈关节定位中心(J),使其位于Mf后方100mm,H点垂直上方588mm处。在头/颈关节中心(J)与车辆座椅配置不兼容的情况下,调节驾驶员座椅至纵向调节范围的中点。如果座椅无法调节至纵向调剂范围的中点,应使用最接近中点后方的调节位置
3.在Mf和J垂直上方一点(定义为J2)之间画出假想的水平线
4.向后视图像方向旋转关于J2的假想线,直到Mf和用于展示本标准要求后视图像的显示屏中心间的直线距离达到最短值
5.将这个新的Mf旋转位置定义为Mr(旋转的眼中点)
试验程序
1.安放一台35mm或更大规格的静态照相机、摄像机或等效的数码设备,使相机图像平面中心位于Mr且相机镜头对准显示器后视图像中心
2.将标尺固定在后视图像底部,方向与某个试验对象圆柱体中心线垂直。如果车辆头枕遮挡显示器的摄像视野,可对头枕进行调整或移除
3.使用相机拍摄视觉显示图像和显示的后视图像
提取摄像数据
1.使用相片,测量相片中标尺50mm划定部分的表现长度,沿标尺边缘最靠近后视图像且在后视图像水平中心附近的一点处
2.使用相片,测量图B中位于G、H和I三个试验目标中的上部彩色条带的水平宽度
3.将测量得到三个试验目标的彩色条带水平宽度定义为dG、dH和dI
获得比例因子
1.使用相片显示标尺50mm部分的表现长度,将该表现长度除以50mm以获得比例因子。将比例因子定义为比例尺。
确定视野距离
1.确定从旋转的眼中点Mr到后视图像中心的实际距离。将该视野距离定义为a_eye
计算试验目标正对的视角
使用以下等式计算正对的视角:

其中i 可以取测试对象 G、H 或 I 的值,反正弦以度为单位进行计算
探测系统的试验方法
后方水平范围探测
试验条件
1.测试期间,风速应不超过1m/s
2.温度应为20±5 °C,湿度应为60±25%。不应有雨雪天气
3.试验应在平坦干燥的沥青或水泥表面进行。
4.试验不应受来自任何墙壁、附属试验设备或其他环境物体的反射声波或电磁波影响。
试验准备
1.应使用一个试验对象。从后边缘到试验对象的距离和试验对象的位置由制造商选择,以确保探测到试验对象。试验对象应位于后方水平区域的可探测网格内。初始状态的试验车辆应附带处于开启状态的探测系统(由制造商或在用户手册中声明),且应处于驻车条件。此处的驻车条件是指在车辆装备自动变速箱的情况下选择P(驻车)档,并且在车辆装备手动变速箱的情况下选择N档并且驻车制动已启用
试验方法
1.探测范围:最大探测范围应为1.0m。矩形宽度w_r等于沿后轴测量的车辆宽度。尺寸应圆整到最接近的0.1m,示例:

2.最小探测率:后方水平范围所需的最小探测率应如下:
——A1范围为90%
——A2范围为87%
——不应有大于2x2网格构成正方形的未探测孔
——当连续超过5s发出预警,判定为探测到试验对象。对每个试验对象应进行一次探测试验。如有必要,根据检测机构和制造商达成一致,在5次试验中有4次发出预警的情况下,可判定为探测到试验对象
响应时间
试验条件
1.车辆应保持泊车完成状态,直到确保所有电子系统关闭;或至少泊车30分钟。
2.允许试验人员或设备位于车辆内
3.确保车辆挡位处于空挡或前进档
4.试验可从打开驾驶员侧车门开始,一旦车门打开,它应当再次关闭
试验程序
1.在要求的探测区域内安放试验目标。
2.将车辆设定为主动车辆模式。该动作应启动第一个计时器。
3.等待至少6s。
4.通过选择倒车模式开始后退事件。如果将车辆设定为主动车辆模式6s后不能将车辆设定为倒车模式,后退事件应在技术上尽快开始。根据制造商的规格启动第二个计时器,且不迟于挂入倒车模式或倒车挡位。
5.记录第二个计时器的响应时间,直到信息信号可用
相关文章:
法规标准-UN R158标准解读
UN R158是做什么的? UN R158全名为针对驾驶员识别车辆后方弱势道路使用者,联合国对倒车系统和机动车的统一规定,该法规涉及批准倒车和机动车辆的装置,主要为保证倒车时避免碰撞,方便驾驶员观察了解车辆后部人员和物体…...

160个CrackMe之002
这道题就很简单 有了第一道题目的支持 我们就能做 首先 我们先要下载Msvbvm50.dll Msvbvm50.dll下载_Msvbvm50.dll最新版下载[修复系统丢失文件]-下载之家 然后我们可以运行程序了 比之前那个还简单 就是输入 然后比对 报错或者成功 开始逆向分析 先去常量中进行查找 找…...

3. 响应状态码及Response对象的status_code属性
3. 响应状态码及Response对象的status_code属性 文章目录 3. 响应状态码及Response对象的status_code属性1. 响应状态码2. 响应状态码共分为5种类型2.1 1xx(临时响应)2.2 2xx (成功)2.3 3xx (重定向)2.4 4x…...

MIME 类型列表 03
看表~按照内容类型排列的 MIME 类型列表 类型/子类型扩展名application/envoyevyapplication/fractalsfifapplication/futuresplashsplapplication/htahtaapplication/internet-property-streamacxapplication/mac-binhex40hqxapplication/msworddocapplication/msworddotappl…...

SpringBoot项目登录并接入MFA二次认证
MFA多因素认证(Multi-Factor Authentication ): 一些需要身份认证的服务(如网站),为了提升安全性,通常会在账号密码登录成功后,要求用户进行第二种身份认证,以确保是正确用户登录,避…...

算法与数据结构(三)
一、堆 1,堆结构就是用数组实现的完全二叉树结构 根节点的左孩子的下标为:2i1,右孩子为2i2。两个孩子的父节点为(i-1)/2向下取整 2,完全二叉树中如果每棵子树的最大值都在顶部就是大根堆 从下往上将孩子与父节点进行比较,如果子叶…...

亚马逊云科技出海日,让数字经济出海扩展到更多行业和领域
数字化浪潮之下,中国企业的全球化步伐明显提速。从“借帆出海”到“生而全球化”,中国企业实现了从传统制造业“中国产品”出口,向创新“中国技术”和先导“中国品牌”的逐步升级。 作为全球云计算的开创者与引领者,亚马逊云科技…...
Pb协议的接口测试
【摘要】 Protocol Buffers 是谷歌开源的序列化与反序列化框架。它与语言无关、平台无关、具有可扩展的机制。用于序列化结构化数据,此工具对标 XML ,支持自动编码,解码。比 XML 性能好,且数据易于解析。更多有关工具的介绍可参考…...
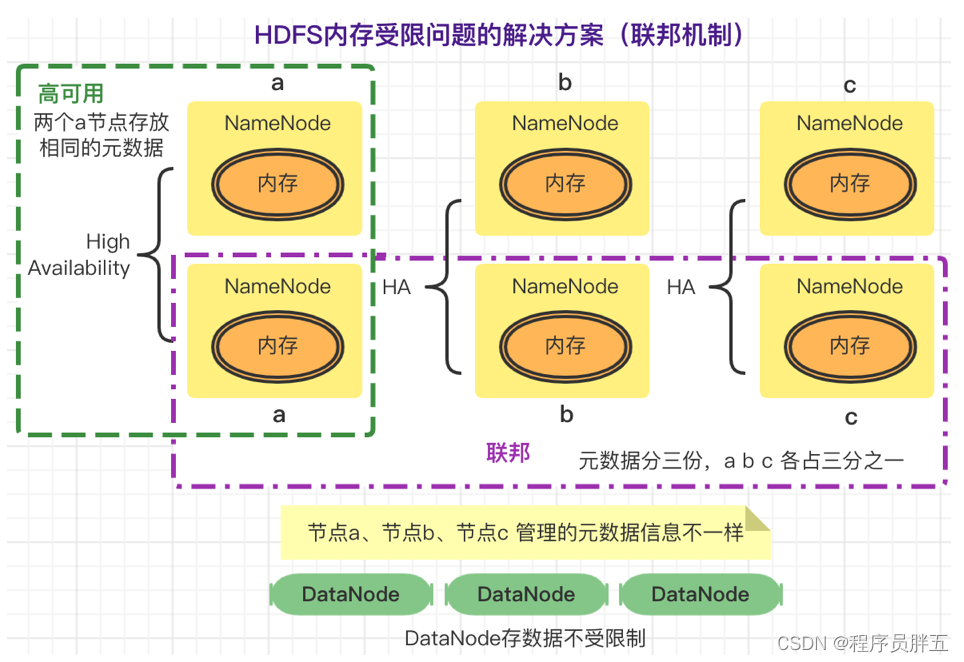
2. 分布式文件系统 HDFS
2. 分布式文件系统 HDFS 1. 引入HDFS【面试点】 问题一:如果一个文件中有 10 个数值,一行一个,并且都可以用 int 来度量。现在求 10 个数值的和 思路: 逐行读取文件的内容把读取到的内容转换成 int 类型把转换后的数据进行相加…...

借助金融科技差异化发展,不一样的“破茧”手法
撰稿 | 多客 来源 | 贝多财经 民营银行的诞生顺应了普惠金融的要求,承担着支持民营经济、服务小微的历史使命。经过近年来的发展,19家民营银行形成了特色化、差异化的发展模式,并用各自本领实践普惠金融的初心。 本文从多家民营银行在核心技…...

typescript中type、interface的区别
一、概念定义 interface:接口 在TS 中主要用于定义【对象类型】,可以对【对象】的形状进行描述。type :类型别名 为类型创建一个新名称,它并不是一个类型,只是一个别名。 二,区别 interface: …...

Ingress详解
Ingress Service对集群外暴露端口两种方式,这两种方式都有一定的缺点: NodePort :会占用集群集群端口,当集群服务变多时,缺点明显LoadBalancer:每个Service都需要一个LB,并且需要k8s之外设备支…...

【递归算法的Java实现及其应用】
文章目录 递归算法概述递归算法的实现步骤递归算法的Java实现递归算法的底层工作原理递归算法的底层代码讲解(优先级高)递归算法的实际应用场景递归算法在场景中解决的问题递归算法的优点和缺点总结 递归算法概述 递归算法是一种通过调用自身来解决问题…...
2023年度第四届全国大学生算法设计与编程挑战赛(春季赛)
目录 2023年度第四届全国大学生算法设计与编程挑战赛(春季赛)1、A2、Bx3、Cut4、Diff5、EchoN6、Farmer7、GcdGame8、HouseSub9、IMissYou!10、Jargonless 2023年度第四届全国大学生算法设计与编程挑战赛(春季赛) 1、A 题目描述…...

如何用PHP获取各大电商平台的数据
PHP获取API数据是指使用PHP语言从web服务中提取数据。API是指应用程序接口,它允许应用程序之间进行交互和通信,并且允许一个应用程序从另一个应用程序获取数据。PHP是一种网站开发语言,它可以使用多种方式来获取API数据。 在PHP中࿰…...
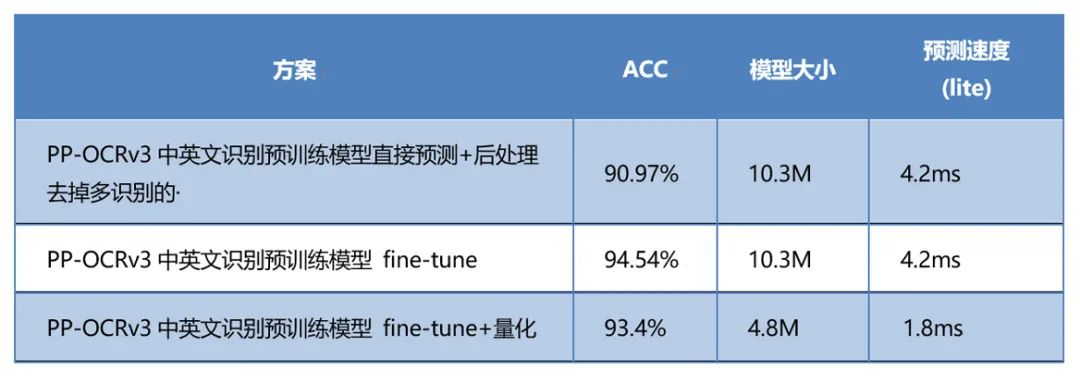
一站式完成车牌识别任务:从模型优化到端侧部署
交通领域的应用智能化不断往纵深发展,其中最为成熟的车牌识别早已融入人们的日常生活之中,在高速公路电子收费系统、停车场等场景中随处可见。一些企业在具体业务中倾向采用开源方案降低研发成本,但现有公开的方案中少有完成端到端的车牌应用…...
Linux4.8Nginx Rewrite
文章目录 计算机系统5G云计算第六章 LINUX Nginx Rewrite一、Nginx Rewrite 概述1.常用的Nginx 正则表达式2.rewrite和location3.location4.实际网站使用中,至少有三个匹配规则定义5.rewrite6.rewrite 示例 计算机系统 5G云计算 第六章 LINUX Nginx Rewrite 一、…...
DHT11温湿度传感器
接口定义 传感器通信 DHT11采用简化的单总线通信。单总线仅有一根数据线(SDA),通信所进行的数据交换、挂在单总线上的所有设备之间进行信号交换与传递均在一条通讯线上实现。 单总线上必须有一个上拉电阻(Rp)以实现单…...

RestTemplate超简单上手
目录 1.什么是RestTemplate? 2.RestTemplate的使用 2.1spring环境下 注意1:RestTemplate中发送请求execute()和exchange()方法的区别 execute()方式 exchange()方式 二者的区别 注意2:进阶配置——底层HTTP客户端 2.2非spring环境下 1.什么是R…...

监控系统设计原则及实现目标
1.1.1.1 1 .完善的设计理念: 包括符合国际发展潮流的特性化设计,完整的安防监控及围墙周界报警系统 的布线、设备安装、调试、测试、验收的“交钥匙”工程管理制度,以及符合标 准的质量控制体系。 1.1.1.2 设计原则…...

不使用库函数,实现 strcpy,strcat,strcmp
文章目录 1、strcpy 原型2、strcmp 原型 1、strcpy 原型 char* strcpy(char* des, const char* source) {char* r des;assert((des ! NULL) && (source ! NULL));while((*r *source)!\0);return des; }可以自行实现: char* myStrcpy(char* dest, char* …...

别再自己造轮子了!.NET 8项目里用BouncyCastle库快速集成SM4国密加密
在.NET 8中高效集成SM4国密算法的工程实践 金融级应用开发中,数据加密是保障业务安全的基石。当项目需要符合国内密码行业标准时,SM4算法往往成为首选方案。但现实开发中,许多团队仍在重复造轮子——从零实现加密算法不仅耗时耗力,…...

终极ViGEmBus驱动指南:如何让Windows完美识别任何游戏控制器
终极ViGEmBus驱动指南:如何让Windows完美识别任何游戏控制器 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus 你是否曾经遇到过这样的情况&#x…...

ROFL Player终极指南:英雄联盟回放分析工具完整使用教程
ROFL Player终极指南:英雄联盟回放分析工具完整使用教程 【免费下载链接】ROFL-Player (No longer supported) One stop shop utility for viewing League of Legends replays! 项目地址: https://gitcode.com/gh_mirrors/ro/ROFL-Player 还在为英雄联盟回放…...

2026年透明背景图片制作方法完全指南|免费工具推荐
最近有个朋友问我:"怎样才能快速制作透明背景图片?"我才意识到,很多人在处理图片时都会遇到这个问题——无论是做电商商品图、证件照换底色,还是简单的社交媒体配图,都需要把背景去掉。今天我就根据自己这几…...

5分钟上手Efficient-KAN:高效Kolmogorov-Arnold网络实战指南
5分钟上手Efficient-KAN:高效Kolmogorov-Arnold网络实战指南 【免费下载链接】efficient-kan An efficient pure-PyTorch implementation of Kolmogorov-Arnold Network (KAN). 项目地址: https://gitcode.com/GitHub_Trending/ef/efficient-kan 还在为传统神…...

基础设施即代码最佳实践:自动化云原生基础设施管理
基础设施即代码最佳实践:自动化云原生基础设施管理 一、基础设施即代码概述 1.1 基础设施即代码的定义 基础设施即代码(Infrastructure as Code, IaC)是一种将基础设施配置和管理通过代码来实现的方法。它允许开发者使用版本控制、自动化测试…...

手把手教你:用闲置安卓手机+IP摄像头App,5分钟搭建一个免费的RTSP监控流
闲置安卓手机变身专业监控摄像头:零成本RTSP视频流搭建全指南 你是否曾想过,抽屉里那台落灰的旧安卓手机还能发挥余热?今天我们将彻底释放它的潜能——无需额外硬件投入,仅用5分钟就能将其改造为支持RTSP协议的专业级监控摄像头。…...

K8s网络插件Flannel与Calico:从原理到实战的选型与部署指南
1. Kubernetes网络插件基础认知 刚接触Kubernetes时,最让我头疼的就是容器网络问题。为什么Pod之间需要通信?为什么有的服务跨节点就访问不了?这些问题的答案都藏在CNI(Container Network Interface)插件里。Flannel和…...

基于MCP协议构建本地AI多代理协作平台:Roundtable AI实战指南
1. 项目概述:告别单打独斗,开启AI圆桌会议如果你和我一样,每天在IDE里写代码、调试、优化,那你肯定也经历过这种场景:遇到一个复杂的性能问题,你打开Claude的聊天窗口,把前端错误日志贴进去&…...