【C51】10-基础51单片机的小车项目(51完结)
10.1小车的安装
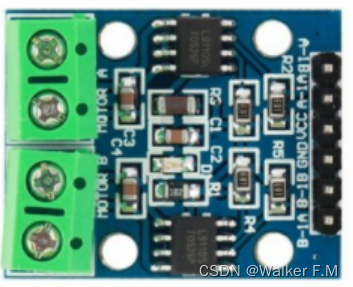
10.2电机模块的开发(L9110S)

10.3驱动电机模块让小车动起来(前后左右)
#include "reg52.h"
#include "intrins.h"sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void main()
{while(1){goForward();Delay1000ms();Delay1000ms();goBack();Delay1000ms();Delay1000ms();goLeft();Delay1000ms();Delay1000ms();goRight();Delay1000ms();Delay1000ms();}
}10.4通过串口控制小车方向
1.通过串口调试工具 利用串口中断
#include "reg52.h"
#include "motor.h"
#include <string.h>#define SIZE 12sfr AUXR = 0x8E;char buffer[SIZE];void UartInit(void) //9600bps@11.0592MHz
{AUXR = 0x01;SCON = 0x50; //配置串口工作方式1,REN使能接收TMOD &= 0x0F;TMOD |= 0x20;//定时器1工作方式位8位自动重装TH1 = 0xFD;TL1 = 0xFD;//9600波特率的初值TR1 = 1;//启动定时器EA = 1;//开启总中断ES = 1;//开启串口中断
}//通过串口中断的方式进行 M1 前 M2 后 M3左 M4右
void Uart_Handler() interrupt 4
{static int i = 0;//静态变量,被初始化一次char tmp;if(RI)//中断处理函数中,对于接收中断的响应{RI = 0;//清除接收中断标志位tmp = SBUF;if(tmp == 'M'){i = 0;}buffer[i++] = tmp;//灯控指令if(buffer[0] == 'M'){switch(buffer[1]){case '1':goForward(); break;case '2':goBack();break;case '3':goLeft();break;case '4':goRight();break;default:stop();break;}}if(i == 12){i = 0;memset(buffer, '\0', SIZE);} }}2.通过蓝牙


10.5利用PWM对小车进行调速
//main.c
extern char speed;
void main()
{
Time0Init();
//UartInit();
while(1){
speed = 10;//10份单位时间全速运行,30份停止,所以慢,20ms是40份的500us
Delay1000ms();
Delay1000ms();
speed = 20;
Delay1000ms();
Delay1000ms();
speed = 40;
Delay1000ms();
Delay1000ms();
}
}
//time.c
#include "motor.h"
#include "reg52.h"
char speed;
char cnt = 0;
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time0Handler() interrupt 1
{
cnt++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
//控制PWM波
if(cnt < speed){
//前进
goForward();
}else{
//停止
stop();
}
if(cnt == 40){//爆表40次,经过了20ms
cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
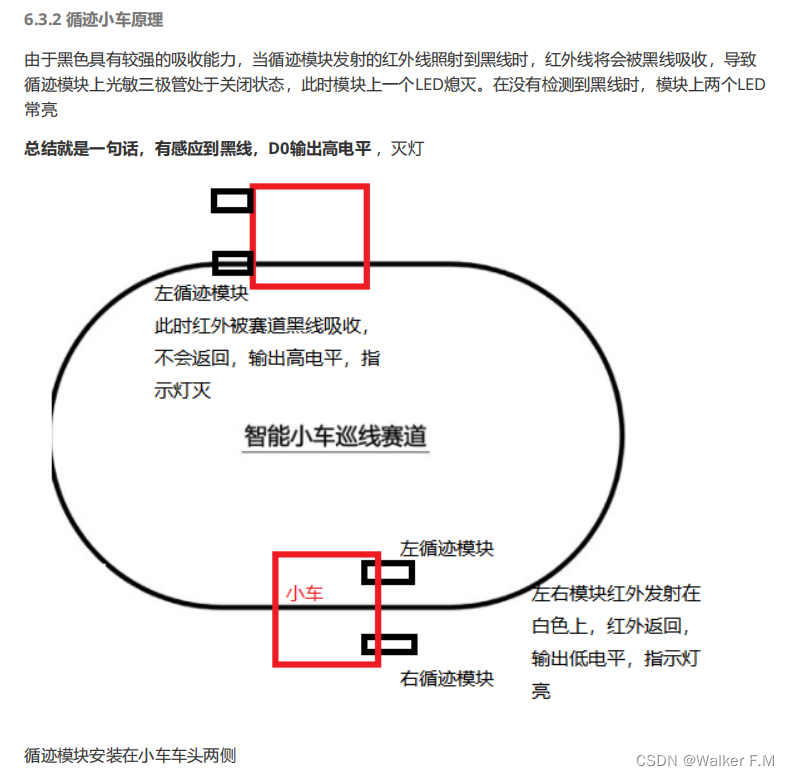
}10.6循迹小车
1.循迹模块使用
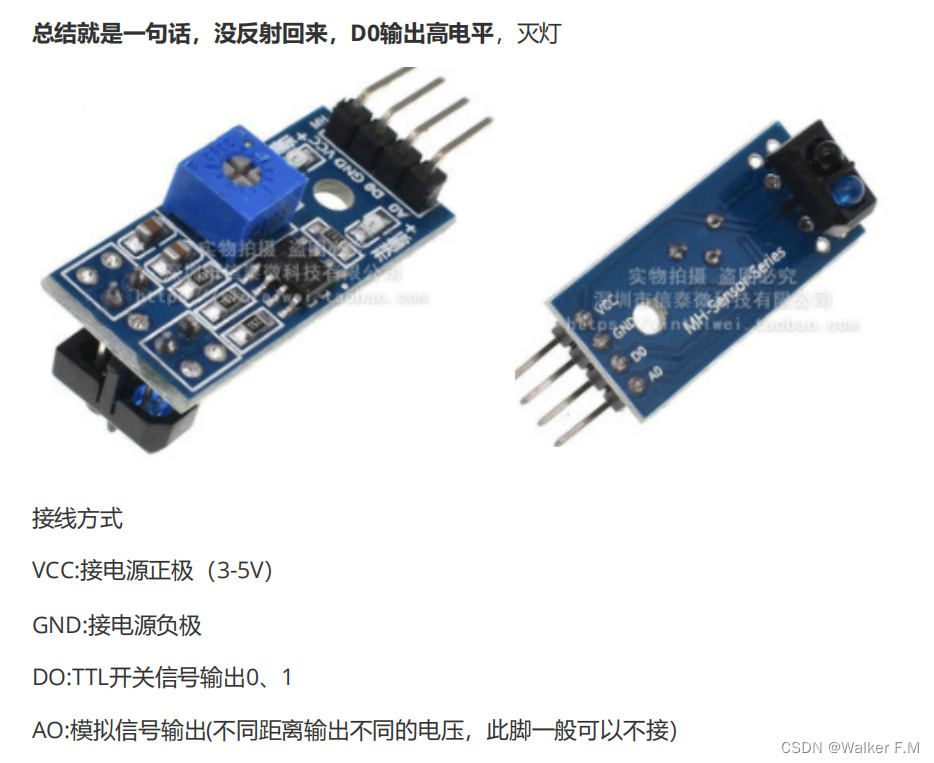
TCRT5000传感器的红外发射二极管不断发射红外线
当发射出的红外线 没有 被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态, 此时模块的输出端为高电平 ,指示二极管一直处于 熄灭状态被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为 低电平 ,指示 二极管被点亮

//main.c#include "motor.h"
#include "delay.h"
#include "reg52.h"sbit Leftxunji = P2^7; //左循迹模块
sbit Rightxunji = P2^6; //右循迹模块void main()
{while(1){/*下方小车两个模块都能反射回来红外,输出低电平,灯亮,直走
上方小车左模块遇到黑线,红外被吸收,左模块输出高电平,右模块输出低电平,左转,反之右转*/if(Leftxunji == 0 && Rightxunji == 0){goForward();//前进}if(Leftxunji == 1 && Rightxunji == 1){stop(); //停止}if(Leftxunji == 0 && Rightxunji == 1){goRight(); //向右}if(Leftxunji == 1 && Rightxunji == 0){goLeft(); //向左}}
}//motor.c#include "reg52.h"sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void stop()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 0;
}语音控制小车 SU-03T LD3320

相关文章:
【C51】10-基础51单片机的小车项目(51完结)
10.1小车的安装 10.2电机模块的开发(L9110S) 接通 VCC , GND 模块电源指示灯亮, 以下资料来源官方,但是不对,根据下节课实际调试 IA1 输入高电平, IA1 输入低电平,【 OA1 OB1 】电…...

进程、线程、锁阶段总结汇总
目录 进程 线程 锁 由于进程线程和锁的方面比较陌生,并且繁杂,所以简单总结一下学习到的函数API 进程 子进程创建 fork(); 进程结束 exit(); 进程回收 wait(); 进程回收 waitpad(); //函数可以指定进程组中的任意子进程,可以设置特殊…...

Filters.jar图片转素描
链接:https://pan.baidu.com/s/1ATlC2l1I83TPYFomHiWuFg?pwd2vm5 提取码:2vm5...
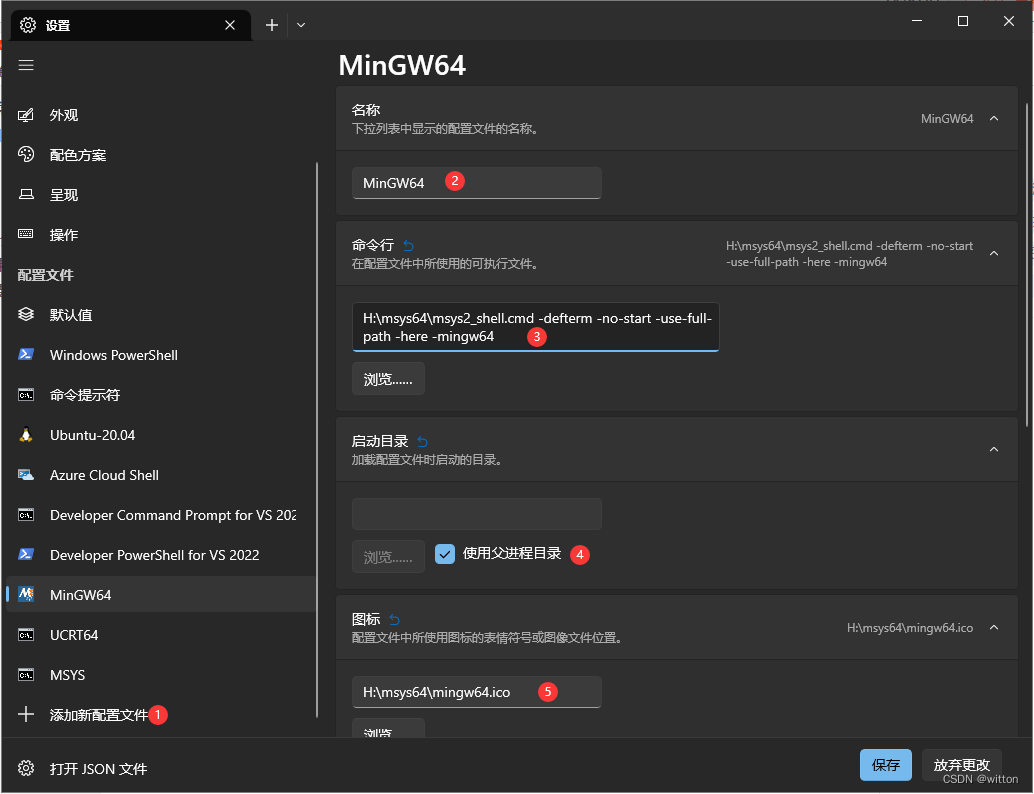
将MSYS2 MinGW集成到Windows终端
微软开发了一款Windows终端的开源软件,非常好用。安装后在Win7及以上系统会在右键菜单中添加一条“在终端中打开”的命令,非常方便。它默认配置了Windows命令行以及PowerShell,如果安装了Visual Studio 2022还会配置Visual Studio 2022的命令…...

SpringBoot项目使用slf4j的MDC日志打点功能
SpringBoot项目使用slf4j的MDC日志打点功能 物料准备: 1.自定义1个线程MDC打点工具类 2.配置logback打印MDC打点的traceId 3.配置webMVC使用MDC打点 4.配置ThreadPoolTaskExecutor使用MDC打点 5.配置HttpClient使用MDC打点 6.测试MDC日志打点效果 线程mdc打…...

宝塔修改默认端口后面板打不开
1、查看防火墙开启的端口,发现没有开启8888 [rootVM-12-12-centos ~]# firewall-cmd --list-ports 20/tcp 21/tcp 22/tcp 80/tcp 888/tcp 8081/tcp 39000-40000/tcp 8081/udp 2、防火墙开启8888端口 [rootVM-12-12-centos ~]# firewall-cmd --zonepublic --add-por…...
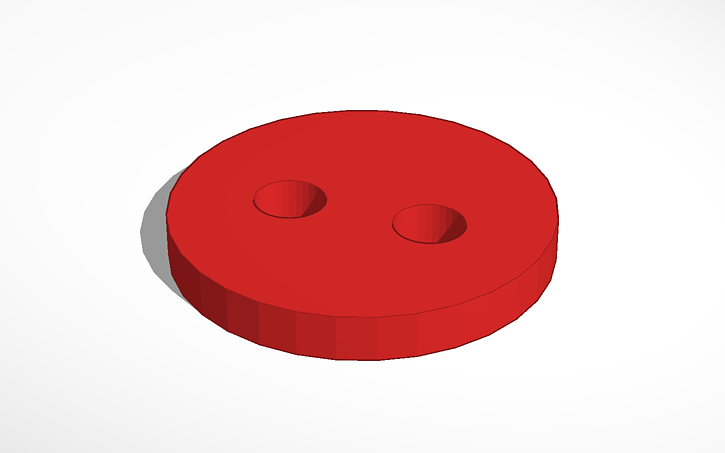
tinkerCAD案例:3.基本按钮
基本按钮 在本课中,您将学习制作具有圆柱形状的基本按钮。 说明 将圆柱体拖动到工作平面。 将其缩小到 2 毫米的高度。 提示: 您可以使用圆柱形状顶部的白点缩小圆柱体。 将其缩小到直径 16 毫米。 这将是按钮的主要形状。 现在我们可以创建允许将纽…...
客户线上反馈:从信息搜集到疑难 bug 排查全流程经验分享
写在前面:本文是我在前端团队的第三次分享,应该很少会有开发者写客户反馈处理流程以及 bug 排查的心得技巧,全文比较长,写了一个多星期大概1W多字(也是我曾经2年工作的总结),如果你有耐心阅读&a…...
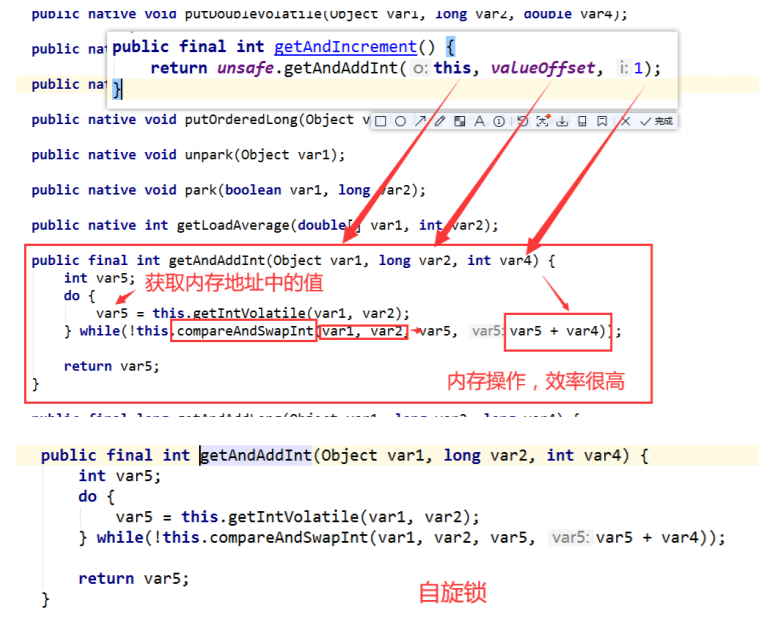
悲观锁、乐观锁、自旋锁
悲观锁、乐观锁、自旋锁 (1)乐观锁 乐观锁是一种乐观的思想,即认为读多写少,遇到并发的可能性低,每次拿数据时都认为别人不会修改,所以不会上锁,但是在更新的时候会判断一下在此期间别人有没有…...
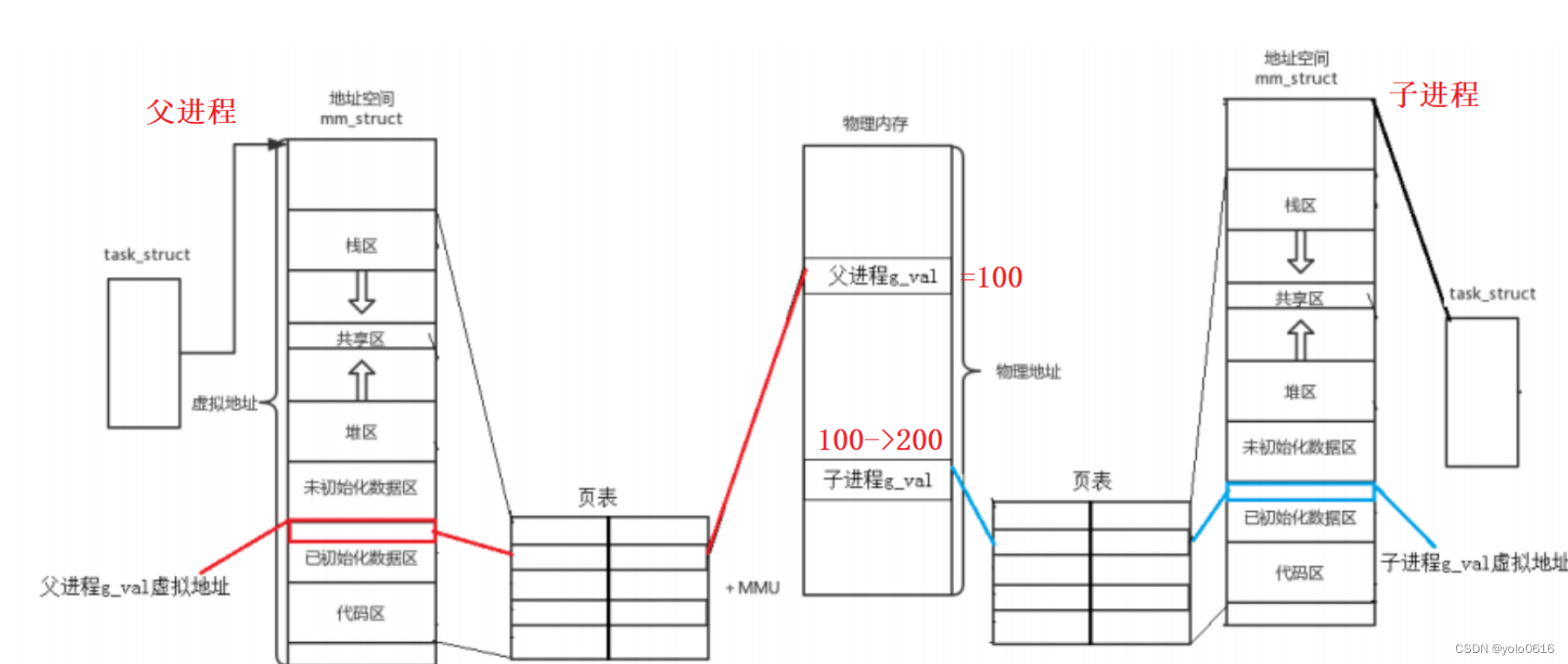
七、进程地址空间
一、环境变量 (一)概念 环境变量(environment variables):系统当中用做特殊用途的系统变量。 如:我们在编写C/C代码的时候,在链接的时候,从来不知道我们的所链接的动态静态库在哪里,但是照样可…...
浅谈智能微电网供电系统的谐波治理
摘要:智能微电网供电系统的特性容易引发谐波,而谐波导致电力损耗加大,降低供电质量。本文从谐波的产 生原因和危害做出详细阐述,并结合智能微电网提出了治 理谐波的方法和措施。 关键词:智能微电网;谐波危害…...

springboot项目的社区/博客系统
课前导读: 你学完一篇,你就多会一项技能,多多少少对你还是有点帮助的不是吗?~~~ 这是博主网页的url:优文共享社区 开发环境:JDK1.8,IDEA2021,MySQL5.7,Windows11 开发技术…...

go语言基础——函数、结构体、接口
由于go不是一门面向对象的语言,因此在有一些特性上和java是有一些区别的,比如go中就没有类这样的概念。下面来介绍一下go的一些特性。 结构体 结构体类似与java中的类,但又不完全一样。在类中,可以定义字段和方法,但…...
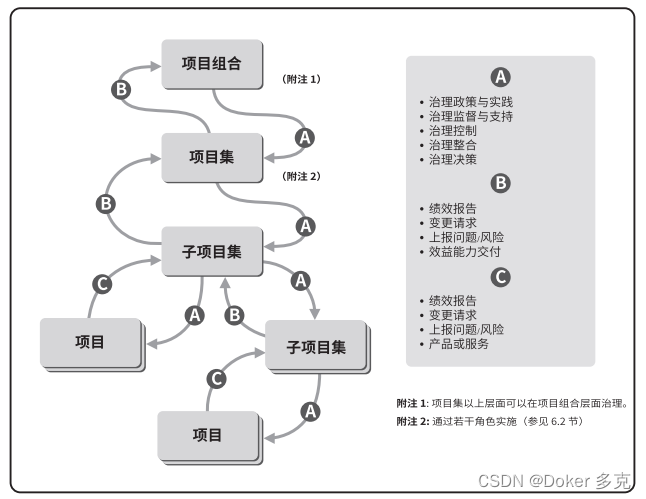
项目集管理—项目集治理
一、概述 项目集治理是实现和执行项目集决策,为支持项目集而制定实践,并维持项目集监督的绩效领域。 本章包括: 项目集治理实践项目集治理角色项目集治理设计与实施 项目集治理包括为了满足组织战略和运营目标的要求,对项目集实…...

MySQL了解之复制(一)
1.1、复制解决的问题 数据复制技术有以下一些特点: (1) 数据分布 (2) 负载平衡(load balancing) (3) 备份 (4) 高可用性(high availability)和容错 1.2、复制如何工作 从高层来看,复制分成三步: (1) master将改变记录到二进制…...

Halcon得出三角形内切圆
Halcon得出三角形内切圆 news2023/5/27 7:14: 目录 一、得出三角形的三个角点二、用类似尺规作图法得出三角形圆心 1、以三角形三角点画出圆形轮廓2、求出三角形轮廓与圆形轮廓之间的交点3、获得角平分线,三边角平分线交点为圆心三、求出圆心到边最短距离即半径 …...

2023年6月北京/广州/深圳CDGA/CDGP数据治理认证招生
DAMA认证为数据管理专业人士提供职业目标晋升规划,彰显了职业发展里程碑及发展阶梯定义,帮助数据管理从业人士获得企业数字化转型战略下的必备职业能力,促进开展工作实践应用及实际问题解决,形成企业所需的新数字经济下的核心职业…...
)
KMP 算法(Knuth-Morris-Pratt)
tip:作为程序员一定学习编程之道,一定要对代码的编写有追求,不能实现就完事了。我们应该让自己写的代码更加优雅,即使这会费时费力。 推荐:体系化学习Java(Java面试专题) 文章目录 一、什么是 …...

Java泛型详解
泛型的理解 泛型的概念 所谓泛型,就是允许在定义类、接口时通过一个标识表示类中某个属性的类型 或者是 某个方法的返回值类型及参数类型。这个类型参数将在使用时(例如,继承或实现这个接口,用这个类型声明变量、创建对象时&#…...

2023上海国际嵌入式展 | 如何通过人工智能驱动的自动化测试工具提升嵌入式开发效率
2023年6月14日到16日,龙智将在2023上海国际嵌入式展(embedded world China 2023)A055展位亮相。同时,6月14日下午3:00-3:30,龙智资深DevSecOps顾问巫晓光将于创新技术及应用发展论坛第二论坛区(A325展位&am…...

CANN/ops-nn快速层归一化算子
aclnnFastLayerNorm 【免费下载链接】ops-nn 本项目是CANN提供的神经网络类计算算子库,实现网络在NPU上加速计算。 项目地址: https://gitcode.com/cann/ops-nn 📄 查看源码 产品支持情况 产品是否支持Ascend 950PR/Ascend 950DTAtlas A3 训练系…...

CANN/ops-nn自适应平均池化3D反向计算
aclnnAdaptiveAvgPool3dBackward 【免费下载链接】ops-nn 本项目是CANN提供的神经网络类计算算子库,实现网络在NPU上加速计算。 项目地址: https://gitcode.com/cann/ops-nn 产品支持情况 📄 查看源码 产品是否支持Ascend 950PR/Ascend 950DT√…...

Let‘s Encrypt证书有效期缩短至90天后,如何实现自动续期
Let’s Encrypt证书有效期缩短至90天后,如何实现自动续期 打开网站突然发现浏览器地址栏一把红色小锁,提示"您的连接不是专用连接"——SSL证书过期了。这可能是站长最不想看到的画面之一:用户无法正常访问、搜索引擎排名下降、甚至…...

CANN/asc-devkit注册默认Tiling
REGISTER_TILING_DEFAULT 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https:…...

从零构建AI编程助手:Rust实现与模型上下文协议实践
1. 项目概述:一个从零开始的教学型AI编程助手如果你和我一样,对Cursor、GitHub Copilot这类AI编程助手背后的工作原理感到好奇,甚至有点“黑盒恐惧症”,那么这个名为Groundhog的项目,绝对值得你花时间深入研究。它不是…...

手机端数据恢复神器,值得收藏
今天给大家推荐一款好用的安卓端数据恢复工具,非常好用的,还有一款Wifi信号检测工具,有需要的小伙伴及时下载收藏! 软件介绍 第一款:数据恢复大师dumpster 提到数据恢复大师,之前好像也有推荐过࿰…...

JetBrains IDE重置插件:终极免费解决方案告别30天试用期限制
JetBrains IDE重置插件:终极免费解决方案告别30天试用期限制 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 你是否曾经在项目开发的关键时刻,突然被JetBrains IDE弹出的"试用期已到期…...

TeamHero:基于规则引擎的智能任务自动化分配系统设计与实战
1. 项目概述与核心价值 最近在GitHub上看到一个挺有意思的项目,叫“TeamHero”,作者是sagiyaacoby。乍一看这个名字,你可能会联想到团队协作或者英雄联盟,但实际上,它是一个专注于自动化团队管理与任务分发的工具。简…...

终极指南:如何用NPYViewer快速可视化NumPy数组数据
终极指南:如何用NPYViewer快速可视化NumPy数组数据 【免费下载链接】NPYViewer Load and view .npy files containing 2D and 1D NumPy arrays. 项目地址: https://gitcode.com/gh_mirrors/np/NPYViewer 还在为NumPy数组数据可视化而烦恼吗?面对二…...

机器学习之逻辑回归详解
摘要逻辑回归(Logistic Regression)是机器学习中最基础且应用最广泛的分类算法之一。尽管名字中带有“回归”二字,但它实际上是一种经典的分类算法,主要用于解决二分类和多分类问题。本文将从几何回归的原理出发,详细介…...