遥控泊车系统技术规范
目 录
1. 版本履历... 3
2. 文档使用范围... 3
3. 术语缩写... 3
4. 系统架构... 4
5. 功能需求... 4
5.1 功能清单... 4
6.2 功能关系描述(如有)... 4
5.3 功能1. 4
5.3.1 功能总体状态动态说明(可基于流程图、状态机类)... 4
其他内容,检查,应包含:... 4
5.3.2 进入APA模式... 4
5.3.3 退出APA模式... 5
5.3.4 与驾驶员操作交互... 5
5.3.5 与其他节点交互... 5
5.3.6 失效处理... 5
5.3.7 HMI交互... 5
6. 性能需求... 5
7. 信号接口定义... 6
8. 功能安全... 6
9. 其他... 6
- 版本履历
| 序号 | 修改日期 | 作者 | 修改描述 | Bse版本 | 项目版本 |
| 1 | 2020-10-10 | 肖湘 | 所有 | V2.0 | |
- 文档使用范围
本规范用于定义泊车系统对其他子系统的需求规范,不同车型根据相对应的配置表进行需求开发。
各项目功能配置情况如下(以实际项目组最新配置表为准)
| 车型 | 配置 | 融合泊车FAPA | 遥控泊车RPA | 记忆泊车AVP | |
| A13 | 中配 高配 顶配 | ● | ● | ● | |
| A18 | 顶配 | ● | |||
| 顶配 |
| 序号 | 缩写 | 英文全称 | 中文全称 |
| 1 | APA | Autonomous Parking Assistance | 自动泊车 |
| 2 | FAPA | Fusion Autonomous Parking Assistance | 融合泊车 |
| 3 | RPA | Remote Parking Assistance | 遥控泊车 |
| 4 | AVP | Autonomous Valet Parking | 代客泊车 |
| 5 | |||
| 6 | |||
| 7 |
- 系统概述
4.1 系统功能说明
(1)泊车系统目前可分为FAPA、RPA。
自动泊车(APA)包含自动泊入和自动泊出。
自动泊入时系统通过超声波传感器寻找车位,当找到车位后,驾驶员点击激活开关激活自动泊车后可松开方向盘和刹车油门踏板,自动泊车系统可控制车辆的方向盘、刹车、油门来使车辆泊入车位中。
自动泊出时车辆在车位中,驾驶员点击激活开关激活自动泊车后可松开方向盘和刹车油门踏板,自动泊车系统可控制车辆的方向盘、刹车、油门来使车辆泊出车位。
融合泊车(FAPA)在APA的基础上融合了摄像头寻找车位,其他与APA一样。
遥控泊车(RPA)包含遥控泊入和遥控泊出。
遥控泊入时驾驶员在车内驾驶车辆寻找车位,当找到车位后驾驶员停车并下车,并通过手机APP激活遥控泊车,遥控泊车系统可自动控制车辆的方向盘、刹车、油门来使车辆泊入车位中。
遥控泊出时车辆停在车位中,驾驶员在车外通过手机APP激活遥控泊车,车辆会先被远程启动,然后再控制车辆的方向盘、刹车、油门来使车辆泊出车位。
(2)关联系统
VCU:接受ESP发送的自动泊车过程的档位需求,扭矩需求指令,综合判断整车状态执行ESP的扭矩、档位需求。
ESP: 负责接收APA的车速,档位,距离信号,并控制请求扭矩和档位信号给VCU
ICM: 负责故障信息提示
EPB:负责响应ESP的锁止/解锁指令,反馈实际状态;
EPS:负责执行APA发送的角度信号请求
4.2 泊车状态说明
APA和FAPA使用PAS_APASt信号来表示泊车状态,具体如下:
| 泊车状态信号 | 泊车状态说明 |
| PAS_APASt=0x0 Off | |
| PAS_APASt=0x1 Standby | |
| PAS_APASt=0x2 Searching | |
| PAS_APASt=0x3 Guidance active | |
| PAS_APASt=0x4 Completed | |
| PAS_APASt=0x5 Failure | |
| PAS_APASt=0x6 Terminated |
- 产品
- 融合泊车功能
- 功能清单
| 序号 | 子功能 | 功能描述 |
| 1 | 功能开启和关闭 | |
| 2 | 功能激活 | |
| 3 | 功能暂停/退出 | |
| 4 | 功能状态指示 | |
| 5 | 故障指示 | |
| 6 | 运行参数变更 | |
| 7 | 搜索车位(支持后台融合车位) | |
| 8 | 水平泊入 | |
| 9 | 垂直泊入 | |
| 10 | 水平泊出 | |
| 11 | 斜车位泊入(自动判断车头或车尾泊入) | |
| 12 | 自动判断功能模式 | |
| 13 | 限位杆识别 | |
| 14 | 地锁识别 | |
| 15 | 禁停车位识别 禁停标识 | |
| 16 | 自选车位 | |
| 17 | 紧急刹车 | |
| 18 | 语音播报泊车操作 | |
-
- 功能概述
6.2.1 功能开启和关闭
车辆启动后,用户可通过以下方式的一种或多种开启全自动泊车,具体根据项目需求来定:
- 硬按键
- 软按键
- 语音方式
硬按键或软按键的布置应容易让用户理解且美观、方便、触摸灵敏。
语音方式:驾驶员可通过主机的语音功能打开全自动泊车。当驾驶员语音“(打开/开启)全自动泊车”等字样时,主机会发送相关语音信号给到全自动泊车系统,全自动泊车系统需根据主机语音信号开启全自动泊车界面。
若车辆带有自动启停功能,全自动泊车需要在车辆进入启停后仍然能开启全自动泊车界面;当开启全自动泊车系统后,发动机启停功能应该禁止停机。
当开启全自动泊车功能后,用户可通过硬按键或软按键关闭全自动泊车。
6.2.2 功能激活
用户开启全自动泊车界面后,当系统判断表1的激活条件同时满足时,会显示功能激活界面,用户可通过硬按键或软按键激活全自动泊车。全自动泊车激活后,系统可自动控制车辆方向盘、刹车、油门、档位等使车辆泊入或泊出车位。
表 1 功能激活条件
| 序号 | 激活条件 |
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 |
6.2.3 功能暂停/退出
全自动泊车激活过程中,若满足表2的任一条件,泊车功能会暂停,当暂停条件恢复后则泊车可继续。
表2 功能暂停条件
| 序号 | 暂停条件 |
| 1 | |
| 2 | |
| 3 | |
| 4 |
全自动泊车激活过程中,若满足表3的任一条件,泊车功能会退出,泊车功能退出后整车需进入驻车状态。
表3 功能退出条件
| 序号 | 退出条件 |
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 13 | |
| 14 | |
| 15 |
6.2.4 功能状态指示
- 功能状态指示主要在全景界面上显示,用户需要根据状态指示界面来了解系统处于哪个状态,泊车开启/搜索到车位/激活/暂停/退出状态界面如下示意图所示,这些示意图仅供参考,具体表现形式根据项目需求来定。
泊车开启界面示意图 搜索到车位界面示意图
泊车激活时的界面示意图 泊车激活后的界面示意图
泊车暂停界面示意图 泊车退出界面示意图
- 在搜索到车位、泊车完成或泊车退出时,需要有声音提醒。
6.2.5 故障指示
当系统出现故障,需发出对应的状态指示提醒驾驶员。以下仅为故障显示示意图,具体根据项目需求来定。
全景显示故障图标示意图
仪表显示故障图标示意图
6.2.6 运行参数变更
运行参数变更指的是驾驶员可以通过界面设置来改变系统的运行情况。
全自动泊车中的运行参数变更主要有语音播报选项(可选)。
若存在语音播报功能,则对语音播报有如下定义:
语音播报是通过人声提示来指导用户进行下一步操作或者提示用户当前的泊车情况,可在主机设置中进行设置。
语音播报默认开启,带记忆功能,即关闭语音播报后,车辆重启后仍保持关闭状态。
语音播报和雷达报警音可同时存在。
语音播报和电话声可同时存在。
6.2.7 搜索车位
车辆启动后,用户开启全自动泊车功能界面后,系统会通过超声波雷达搜索车位,并提示用户搜索车位的状态,并有相关信息提示用户操作,例如向前搜索车位、找到车位请停车、搜索速度过高等提示。搜索车位界面建议显示全景,便于用户观察周围环境,具体根据项目需求来定。
后台搜索车位:若用户未开启全自动泊车功能界面,系统需具备后台搜索车位功能。即系统会在后台自动搜索车位并记住搜索到的车位,当用户打开泊车功能界面时可以立刻显示搜索到的车位。
双边搜索车位:系统应具有双边搜索车位功能,即系统会同时搜索左右两侧的车位,并显示给用户。
搜索车位时支持的档位为D档。
搜索车位支持的标准车位类型如下表4
表4 标准车位类型示意图
| 序号 | 示意图 | 说明 |
| 1 | ||
| 2 | ||
| 3 | ||
| 4 |
6.2.8 水平泊入
水平车位搜索完成后,用户激活全自动泊车,泊车系统规划出合适的泊车路径并控制车辆的方向盘、油门、刹车、档位使得车辆泊入目标车位。
泊车路径规划需满足以下约束:
- 泊车安全性,即车辆沿该路径行驶时不与周围物体发生碰撞;
- 车辆参数约束,即满足车辆转向角及转向角速度约束和纵向速度约束,使得车辆可以跟踪;
- 车辆停放位置约束,即车辆泊入车位后的实际停放位置应与目标车位接近,车身尽量与车位平行。
车辆泊入车位后,车辆应自动完成驻车,并提示用户泊车完成。若车辆未泊入车位或未完成驻车,应提示用户接管车辆。
水平泊入
要求:
- 线车位2.2*6.2
- 过道要求。
6.2.9 垂直泊入
全自动泊车系统搜索到垂直车位后,用户激活泊车系统,系统自动控制车辆的方向盘、油门、刹车、档位使得车辆泊入目标车位。
泊车路径规划需要满足和水平泊入一样的3个约束即泊车安全性约束、车辆参数约束、车辆停放位置约束。车辆泊入车位后,车辆应自动完成驻车,并提示用户泊车完成。若车位未泊入车位或未完成驻车,应提示用户接管车辆。
垂直泊入
要求:
- 线车位2.2*6.2
- 过道要求。
6.2.10水平泊出
水平泊出支持前后有车和仅前方有车两种类型,若前雷达未探测到障碍物,则水平泊出功能不可用,提示用户路径通畅。
水平泊出时,车辆控制车辆的方向盘、油门、刹车、档位使得车辆泊出车位。
泊出完成的评价标准为:当保持车辆的方向盘角度不变时车辆可直行驶出车位并且在前雷达探测范围内无碰撞风险发生。
水平泊出-前后有车 水平泊出-仅前方有车
水平泊出完成
6.2.11 自动刹车避碰
在泊车激活过程中,所有超声波雷达都应时刻检测周围障碍物,若检测到与障碍物有碰撞危险时,泊车系统需自动刹车避免碰撞。
刹车类型分舒适刹车和紧急刹车,若障碍物较早探测到,应进行舒适刹车,在保证安全性的前提下提高系统使用的舒适性;若障碍物紧急出现,则需进行紧急刹车,优先保证安全。
-
- 工作模式(状态机)
6.3.1状态机
6.3.2状态描述
| 状态 | 状态描述 |
| Off | |
| Standby | |
| Searching | |
| Guidance Active | |
| Teminated | |
| Complete | |
| Failed |
6.3.3状态迁移描述
| 状态迁移 | 迁移条件 |
| Off—>Standby | |
| Standby—>Search ing | |
| Searching—> Standby | |
| Searching—>Guid ance Active | |
| GuidanceActive— >Teminated | |
| Searching—>Temi nated | |
| Teminated—> Standby | |
| GuidanceActive— >Complete | |
| Complete—>Stand by | |
| OFF/Standby/Sear ching/Guid nceActive/Teminat ed—>Failed | |
| Failed—>Off |
- 工作流程
- 后台推送,主机推图,客户点击后进去。
- 也可以用客点击进入。
-
- 交互信号
-
- 功能定义
-
- 标定定义
-
- 故障处理
-
- 诊断配置
-
- 功能安全
见功能安全规范
| SG11 |
- 遥控泊车功能
- 功能清单
| 序号 | 子功能 | 功能描述 |
| 1 | 遥控水平泊入 | |
| 2 | 遥控垂直泊入 | |
| 3 | 遥控斜列泊入 | |
| 4 | 遥控水平泊出 | |
| 5 | 遥控垂直泊出 | |
| 6 | 遥控斜列泊出 | |
| 7 | 遥控直入直出 | |
|
|
| |
| 9 | 遥控搜索车位 | |
| 10 | 故障提示 | |
| 11 | ||
| 12 | ||
| 13 | ||
| 14 | ||
| 15 | ||
| 16 | ||
| 17 | ||
| 18 | ||
相关文章:

遥控泊车系统技术规范
目 录 1. 版本履历... 3 2. 文档使用范围... 3 3. 术语缩写... 3 4. 系统架构... 4 5. 功能需求... 4 5.1 功能清单... 4 6.2 功能关系描述(如有)... 4 5.3 功能1. 4 5.3.1 功能总体状态动态说…...

qt 线程状态机实现并发自动任务
一、状态机类 头文件 MyStateMachine.h#ifndef MYSTATEMACHINE_H #define MYSTATEMACHINE_H#include <QStateMachine> #include "ActionTask.h" #include...

社交机器人培育
论文: 自我繁殖的假新闻:机器人和人工智能使印度冲突地区的社会两极分化永久化 Self-Breeding Fake News: Bots and Artificial Intelligence Perpetuate Social Polarization in India’s Conflict Zones 论文链接:https://jps.library.ut…...
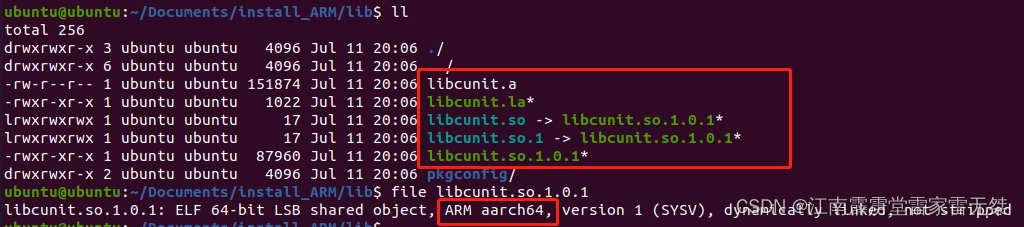
CUnit在ARM平台上的离线搭建(让CUnit编译安装成功之后的可执行文件.so变成ARM下的—ARM aarch64)(实用篇)
前言:1 CUint-2.1-3.tar.bz2压缩安装包下载并解压2 进入CUint-2.1-3目录并且通过指令./bootstrap*产生configure *执行文件3 执行./configure*命令4 make编译5 make install 安装 前言: 在X86架构上的Linux操作系统上面进行cmake编译(Cyclon…...

整数序列(山东大学考研机试题)
水仙花数(中南考研机试题) 链接:3644. 水仙花数 - AcWing题库 /* 暴力枚举罢了 */ #include<iostream> using namespace std; const int N1e3100; int book[N]; int pow3(int k){return k*k*k; } int main() {int m,n;for(int i100;i<999;i){int t1,t2,t3;t1 i%10;t…...
k8s集群安装
目录 一 主机准备 1.1 设备配置 ⚠️注意1 ⚠️注意2 1.2 环境准备 1.3docker安装 二 安装kubeadm、kubectl、kubelet 2.1 添加镜像源 2.2 安装 三 master节点部署 四 node节点加入集群 五 CNI网络插件calico 六 其他节点使用kubectl 1.拷贝文件 2.添加到环境变量…...

【webrtc】ProcessThreadAttached
RegisterModule 调用所在的线程指针传递给ProcessThreadAttached ProcessThreadAttached 调用不是在worker thread 而是在 registers/deregister 这个module或者 start stop 这个module的时候 ** ** pacedsender是一个moudle -实现了...
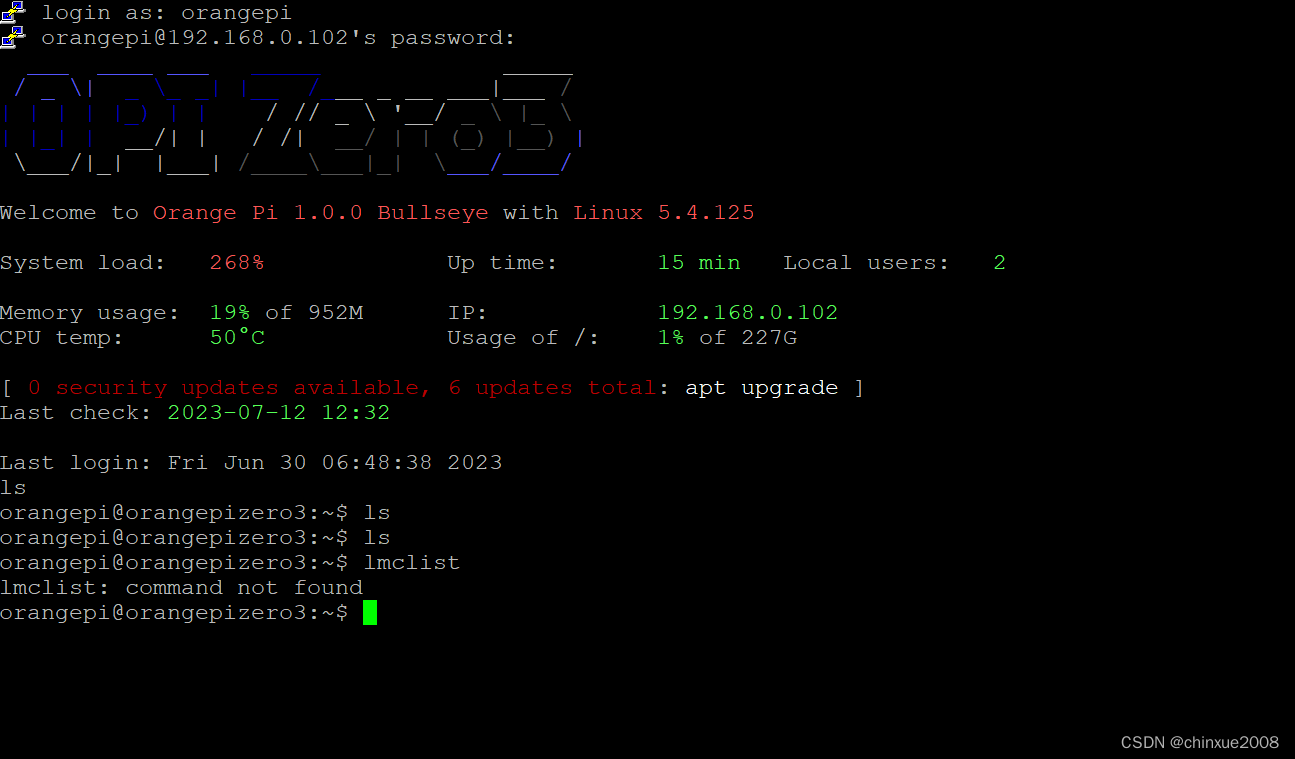
Orange pi3初调试
因为树莓派沦为理财产品1年前出手殆尽后,现在唯一一个B性能不足一直没动力调试,沦为吃灰工具。 偶然之间多多给推了个orange产品预售,看了下pi3的参数,这不和赚了差价的3B一个性能吗?果断定了个预售款,在差…...

手机里的视频怎么转换成MP4格式?简单的转换方法分享
MP4格式是一种广泛使用的视频格式,几乎所有设备和操作系统都支持MP4格式的视频播放。无论是使用 iPhone、iPad、安卓手机、电视等各种设备,都可以播放 MP4 格式的视频。这种广泛的兼容性使得 MP4 成为一种非常方便的视频格式,我们可以随时随地…...
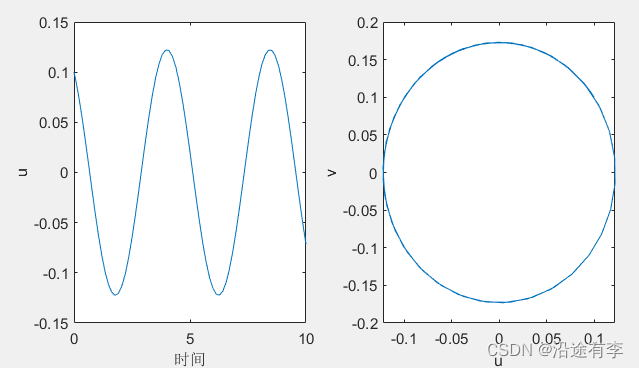
Matlab数学建模实战——(Lokta-Volterra掠食者-猎物方程)
1.题目 问题1 该数学建模的第一问和第二问主要是用Matlab求解微分方程组,直接编程即可。 求解 Step1改写 y(1)ry(2)f Step2得y的导数 y(1).2y(1)-ay(1)*y(2)y(2).-y(2)a*y(1)*y(2) Step3编程 clear; a0.01; F(t,y)[2*y(1)-a*y(1)*y(2);-y(2)a*y(1)*y(2)]; […...

windows下软件推荐
起源与目的 选择任何一个系统作为主力系统都是要好好考虑的。 在去年新买了一块1T的SSD后,就好好想了想这个问题。 Arch Linux, Ubuntu, Windows, macOS, deepin都是在考虑范围的。 不过我考虑到使用体验,最终还是选择了windows。 不选择macOS主要是不喜…...

SQlite数据库
SQlite数据库 1.SQLite简介 轻量化,易用的嵌入式数据库,用于设备端的数据管理,可以理解成单点的数据库。传统服务器型数据库用于管理多端设备,更加复杂 SQLite是一个无服务器的数据库,是自包含的。这也称为嵌入式数…...

Doris-问题
1.启动BE报错 设置系统最大打开文件句柄数(注意这里的*不要去掉) 重启生效!!!重启生效!!!重启生效!!! sudo vim /etc/security/limits.conf * soft nofile 65536 * hard nofile 65536 * soft nproc 131072 * hard nproc 131072 重启生效...

什么是OA系统,什么是工单系统,有啥区别?
一、OA系统与工单系统介绍 1、什么是OA系统 OA系统全称为Office Automation,即办公自动化系统。它是一种专门为企业和机构的日常办公工作提供服务的综合性软件平台,具有信息管理、流程管理、知识管理(档案和业务管理)、协同办公…...

DDoS攻击:网络安全的威胁
什么是DDoS攻击? DDoS(分布式拒绝服务)攻击是一种恶意网络攻击,目的是通过发送大量的请求或占用目标系统的资源,使其无法正常运行。在DDoS攻击中,攻击者使用分布在多个地理位置的多台计算机(也称…...

docker版jxTMS使用指南:device的调整
本文讲解4.2版jxTMS对device的调整,整个系列的文章请查看:docker版jxTMS使用指南:4.2版升级内容 docker版本的使用,请参考docker版jxTMS使用指南 4.0版jxTMS的说明,请查看:4.0版升级内容 为了适应拉取模…...

AI智能语音机器人的功能和作用都有哪些?
智能语音机器人是一种能够使用自然语言处理技术和人工智能算法,通过声音与用户进行交互的机器人。它可以回答用户提出的问题、处理用户的投诉、提供产品或服务的相关信息等等。 实现一个智能语音机器人需要涉及多个技术领域,包括自然语言处理、语音识别…...

vue3+vite+Ts 基于Antv/x6 绘制流程图
需求效果: 需求: 实现一个流程图,双击可对相应的组件进行一些功能操作; 工具栈: 这里使用antv/x6, 基于vue3vitets进行开发 官网地址: https://x6.antv.antgroup.com/examples/showcase/pra…...
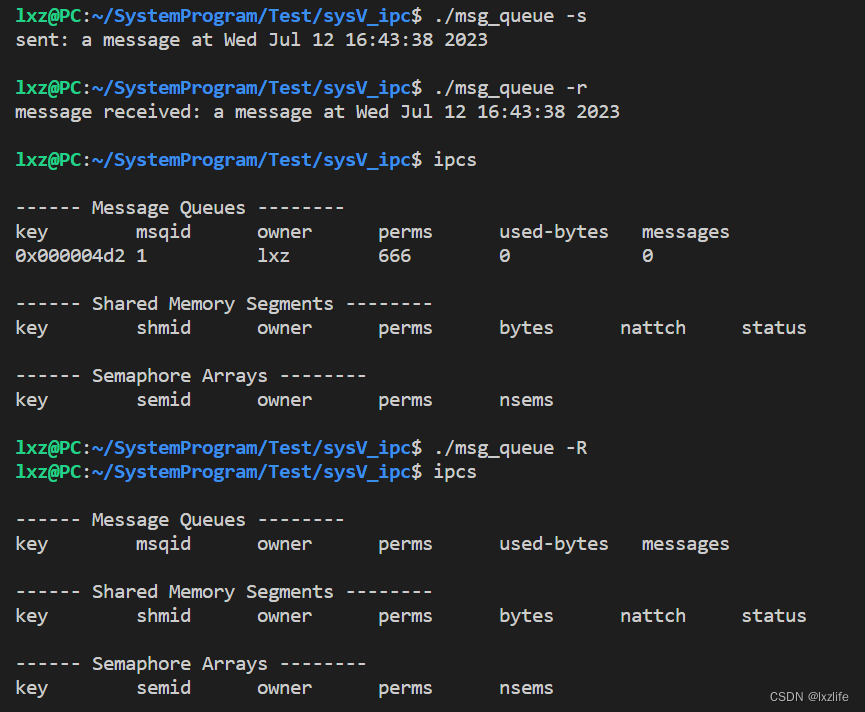
sys V 进程间通信之消息队列
note msgget获取内核消息队列实例 msgctl可以删除内核消息队列实例 msgsnd\msgrcv函数注意struct msgbuf字段的填充 code #include <stdio.h> #include <stdlib.h> #include <string.h> #include <time.h> #include <unistd.h> #include &l…...

Android 报错,闪退(错误)日志保存到手机内存中,以文本文件的形式保存
1.直接贴代码 import android.app.AlarmManager; import android.app.PendingIntent; import android.content.Context; import android.content.Intent; import android.os.Environment; import android.util.Log;import com.nuotu.atmBookClient.App;import java.io.File; i…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...
)
React Native 导航系统实战(React Navigation)
导航系统实战(React Navigation) React Navigation 是 React Native 应用中最常用的导航库之一,它提供了多种导航模式,如堆栈导航(Stack Navigator)、标签导航(Tab Navigator)和抽屉…...
)
React Native 开发环境搭建(全平台详解)
React Native 开发环境搭建(全平台详解) 在开始使用 React Native 开发移动应用之前,正确设置开发环境是至关重要的一步。本文将为你提供一份全面的指南,涵盖 macOS 和 Windows 平台的配置步骤,如何在 Android 和 iOS…...
从WWDC看苹果产品发展的规律
WWDC 是苹果公司一年一度面向全球开发者的盛会,其主题演讲展现了苹果在产品设计、技术路线、用户体验和生态系统构建上的核心理念与演进脉络。我们借助 ChatGPT Deep Research 工具,对过去十年 WWDC 主题演讲内容进行了系统化分析,形成了这份…...

在 Nginx Stream 层“改写”MQTT ngx_stream_mqtt_filter_module
1、为什么要修改 CONNECT 报文? 多租户隔离:自动为接入设备追加租户前缀,后端按 ClientID 拆分队列。零代码鉴权:将入站用户名替换为 OAuth Access-Token,后端 Broker 统一校验。灰度发布:根据 IP/地理位写…...
Mac软件卸载指南,简单易懂!
刚和Adobe分手,它却总在Library里给你写"回忆录"?卸载的Final Cut Pro像电子幽灵般阴魂不散?总是会有残留文件,别慌!这份Mac软件卸载指南,将用最硬核的方式教你"数字分手术"࿰…...

Fabric V2.5 通用溯源系统——增加图片上传与下载功能
fabric-trace项目在发布一年后,部署量已突破1000次,为支持更多场景,现新增支持图片信息上链,本文对图片上传、下载功能代码进行梳理,包含智能合约、后端、前端部分。 一、智能合约修改 为了增加图片信息上链溯源,需要对底层数据结构进行修改,在此对智能合约中的农产品数…...
安宝特案例丨Vuzix AR智能眼镜集成专业软件,助力卢森堡医院药房转型,赢得辉瑞创新奖
在Vuzix M400 AR智能眼镜的助力下,卢森堡罗伯特舒曼医院(the Robert Schuman Hospitals, HRS)凭借在无菌制剂生产流程中引入增强现实技术(AR)创新项目,荣获了2024年6月7日由卢森堡医院药剂师协会࿰…...

如何配置一个sql server使得其它用户可以通过excel odbc获取数据
要让其他用户通过 Excel 使用 ODBC 连接到 SQL Server 获取数据,你需要完成以下配置步骤: ✅ 一、在 SQL Server 端配置(服务器设置) 1. 启用 TCP/IP 协议 打开 “SQL Server 配置管理器”。导航到:SQL Server 网络配…...

高防服务器价格高原因分析
高防服务器的价格较高,主要是由于其特殊的防御机制、硬件配置、运营维护等多方面的综合成本。以下从技术、资源和服务三个维度详细解析高防服务器昂贵的原因: 一、硬件与技术投入 大带宽需求 DDoS攻击通过占用大量带宽资源瘫痪目标服务器,因此…...