【论文阅读】利用道路目标特征的多期车载激光点云配准
目录
- 引 言
- 1 道路场景点云特征
- 2 配准方法
- 2.1 配准基元获取
- 2.2 特征点提取
- 2.3 两期道路场景车载点云的配准
- 2.3.1 基于特征点的4PCS 粗配准
- 3 实验与分析
- 4 结论
- 5 参考文献
摘 要 针对车载移动测量系统获取的城市道路点云场景巨大、目标复杂多样,多期道路场景重访车载点云位置一致性差、配准难度大的问题,提出一种利用道路目标特征的多期车载激光点云配准方法。首先分析道路场景的车载点云特征,以时间间隔对道路点云数据进行分段,分割条带分布的大场景道路点云为多个连续分布的小范围分段点云; 其次提取分段内的固定目标地物作为配准基元,变多目标为固定分布的规则地物; 最后结合法向量夹角和Local Surface Patches 关键点检测法提取固定目标地物的特征点,以基于特征点的4PCS( 4-Points Congruent Sets) 粗配准算法和迭代最近点ICP( Iterative Closest Point) 精配准算法,完成多期城市道路车载激光点云的配准。实验表明,该方法能够准确高效地实现城市道路多期车载激光点云位置偏差的改正,为道路场景车载激光点云的质量改善和变化检测奠定了基础。
关键词 车载激光点云; 城市道路; 点云特征; 配准基元; 点云配准
中图分类号 P 237 文献标识码 A
引 言
车载移动测量技术作为一种先进的测量手段,能够快速动态地获取高精度、高密度和高分辨率的三维激光点云数据[1],最大限度地克服遥感影像无法避免的遮挡问题[2],在获取三维道路信息方面具有独特的优势。但由于测量误差的存在,导致移动测量系统往返和不同时期采集的点云所处空间位置不同[3],为改善点云的质量和实现不同时期道路场景目标的变化发现,需要通过配准纠正点云的位置偏差。点云配准分为粗配准和精配准,精配准使用最广泛的方法是文献[4]提出的ICP 算法及其众多改进算法,它们都执行非凸误差函数的局部最小化,因此需要足够精确的粗配准,以便收敛到期望的解。粗配准一般使用同名特征点、线[5]、面[6]等几何基元构造约束条件,同名特征线和特征面的方法只适用于线、面特征十分明显的场景,同名点特征的方法适用于多种场景,因此,基于点特征的粗配准方法较多。文献[7]提出随机采样一致性RANSAC 粗配准,首先从源点云中随机选取3 个不共线的采样点,从目标点云中搜索其对应点; 然后用样本估计模型参数对点云进行变换,将变换后距离小于阈值的点对作为内点集; 重复迭代若干次,用内点数最多的变换参数实现点云的粗配准。文献[8]提出4PCS 粗配准,在RANSAC 配准算法的基础上,用随机选取的共面4 点集代替不共线的3 点,提高了算法的鲁棒性。文献[9]提出采样一致性SAC_IA 粗配准算法,首先从源点云中选取若干个采样点,确保采样点之间的距离大于某一阈值; 然后计算每一个采样点的FPFH 特征,在目标点云中找到FPFH 与采样点FPFH 相似的点集合,从这些点中随机选择一个点作为样本点的对应点; 最后计算由采样点及其对应点定义的刚性变换,完成粗配准。目前,基于车载激光点云两两配准的研究较少,针对道路场景特殊性的研究更少。对于城市道路场景下获取的大数据量车载激光点云,直接进行配准的效率低、精度差,难以满足实际工程应用的需求[10]。本文通过分析道路场景的车载点云特征,提出一种基于城市道路目标特征的多期车载激光点云配准方法,从配准基元获取、特征点提取、点云配准等方面着手,将不同时期获取的车载激光点云数据融合在一起,为改善点云质量和多期车载激光点云道路场景的变化检测奠定基础。
1 道路场景点云特征
车载移动测量系统的主要数据成果是扫描对象表面点云的空间位置信息,点云的位置精度和扫描对象表面覆盖的完整性是影响点云配准精度的重要因素。实验数据由某型车载移动测量系统获取,该系统的测距范围为0.3 ~ 119 m。在测量车的行驶过程中,组合导航系统在10 s 的中断时间内后处理的绝对位置精度为0.1 m,三维激光扫描仪通过线性扫描的方式获取路面及道路两侧地物的密集点云,能够真实再现道路场景地物的局部细节特征。图1 为道路场景示意图,道路两侧的信号灯、照明灯柱、标志牌等公共设施和行道树、低矮植被; 道路上的护栏、隔离墩、来往车辆、行人等; 路面与其他构造物之间的路缘石等; 都能在点云数据中真实再现。但是,由于三维激光扫描仪自身存在视场限制; 地物之间存在相互遮挡;来往车辆、行人等其他外在因素; 都会导致所获取的点云对扫描对象表面的覆盖不完整。

2 配准方法
本文提出基于城市道路目标特征的多期车载激光点云配准方法,主要包括配准基元获取、特征点提取、由粗到精的配准和算法性能评估等4 个步骤。其具体流程如图2 所示。

2.1 配准基元获取
车载移动测量系统沿轨迹采集的道路点云具有数据量大、各类误差随时间累积等特点,为便于数据处理和减弱全局累积误差对点云配准的影响,以5~10 s 为时间间隔,将道路数据进行分段,保证点云数据的绝对位置精度在0.1 m 之内。
通在点云配准的过程中,天空的飞鸟,植被的生长、枯败,树叶的随风飘动,路面的坑槽、裂缝、车辆、行人等都会影响配准的精度。城市道路的公共设施分布规则、位置固定,路缘石高出路面10~20 cm,有足够的埋置深度,稳定性良好,除少量车辆和行人的遮挡,路缘石数据基本完整。对分段后的点云数据采用形态学滤波剔除地面点,统计滤波剔除噪点和离群点,提取公共设施和路缘石位置的点云数据作为配准基元。保证在行道树茂密,遮挡严重的情况下,仍然有路缘石边界使两期数据有足够的重叠区域。
2.2 特征点提取
特征点是点云数据中具有代表性和描述性并能够反映点云外观的关键点,能否快速准确提取特征点,这对配准的精度和效率有很大的影响[11]。法向量和曲率是点云数据中各点的重要属性,法向量夹角及曲率值均不随物体位置的变化而改变[12]。
点云数据中任一点的法向量,垂直于该点所在的切平面,如图3 所示。图3( a) 为区域较为平坦,其区域上法向量变化不大; 图3( b) 为起伏变化大的区域,其法向量变化明显。

因此,如果某点所在邻域法向量变化较大,则该点与其附近点的法向量夹角也较大,该邻域起伏变化明显,认为该邻域存在特征点。主曲率是某一点局部形状的体现,Local Surface Patches 关键点[13]检测法是用主曲率计算每一个点表面形状的定量度量形状指数 S ( p ) S( p) S(p) 检测点云表面变化较大的点,确定特征点。任一点Pi处表面的形状指数 S ( p i ) S( pi) S(pi) 定义为

式中: k 1 、 k 2 k_1、k_2 k1、k2分别是主曲率的最大值和最小值; S ( p i ) S( pi) S(pi) 的取值范围为[0,1]。曲面上任一局部表面形状指数的极大值代表凸点,极小值代表凹点,凸点和凹点作为特征点可以准确描述局部表面的变化程度。
本文结合法向量夹角和Local Surface Patches关键点检测法提取特征点的方法如下:
首先对配准基元中的点云数据建立八叉树索引,计算每个八叉树的体素中心点,记作 P C i P_{Ci} PCi;然后计算点云中每一个点的法向量 n n n 和每一个体素中心点的法向量 n P C i nPCi nPCi ; 以体素中心点 P C i PCi PCi为查询点,计算查询点与该体素邻域内所有点的法向量夹角之和,夹角之和除以体素中心点的个数进行归一化,按照从小到大的顺序排序,取中间位置处的值作为阈值,大于阈值的部分为特征区域; 特征区域中每一个八叉树体素邻域内形状指数的极值点,即为特征点。
2.3 两期道路场景车载点云的配准
两期道路场景车载点云的配准就是要寻找不同时期获取的点云数据中同一位置的点( 又称对应点) 的坐标,然后根据对应点坐标将不同期的点云变换到同一位置,使两期点云重合。整个过程表示为
Q = R P + t Q=RP+t Q=RP+t
式中: P P P 和 Q Q Q 分别是两次扫描的点集、记作源点云 P P P 和目标点云 Q Q Q; R R R表示旋转矩阵; t t t 表示平移向量; R R R 和 t t t 统称为变换矩阵。
实际应用中,两期点云的同一位置并不存在绝对一一对应的点,因此,只需对应点对数量最大化和对应点对距离最小化即可。
2.3.1 基于特征点的4PCS 粗配准
从源点云 P P P的特征点集 P T P_T PT中先随机选取不共线的3 个点,再选取第4 个共面点,组成如图4所示的一组共面4 点集作为基 B a , b , c , d B{ a,b,c,d} Ba,b,c,d 。这里的4 个共面点要求距离足够远且位于两期点云数据的重叠区域[14]。

通过仿射不变量[15]在目标点云 Q Q Q 的特征点集 Q T Q_T QT中找到所有与基B 近似全等的4 个共面点,计算得到变换矩阵 T 0 T_0 T0并作用于点集 P T P_T PT,迭代计算 L L L次; 选取两个特征点集在一个足够小的对应距离 δ δ δ内对应点对数量最多的一次变换作为最佳变换矩阵 T b T_b Tb,同时 T b T_b Tb将作用于源点云 P P P 完成粗配准。

基于此,可以确定仿射变换中的对应4 点集,但是对于平面较大的点云会寻找到错误的对应4点集导致配准失败[16]。本文采用形态学滤波剔除地面点,从而避免了点云数据中较大平面对4PCS 配准的影响,将路缘石和公共设施的点云数据作为配准基元提取特征点进行配准,保证选取的4 个点位于重叠区域且距离足够远。
最大迭代次数 L L L 的确定公式如下:

式中: f f f 为两片点云的重叠比例;$v¥ 为算法成功的期望概率; h h h 为每一个对应4 点集中对应点的个数; f f f 和 v v v 的取值范围为( 0,1) , f f f 根据实际数据进行预估, v v v 的取值为0.999 99; 对于刚性变换, h = 3 h = 3 h=3就足够了。
3 实验与分析


4 结论
本文以车载激光点云数据为研究对象,通过分析道路场景车载激光点云的特征,提出针对道路目标特征的多期道路重访车载激光点云配准方法。以道路的公共设施和路缘石为配准基元,变复杂场景为规则分布的特征地物; 结合法向量和曲率信息提取均匀而不失描述性的特征点,提高了配准算法的精度和效率; 完成多期车载道路激光点云数据的配准,实现位置偏差的改正。从可视化分析和定量指标评价,本文方法能较好地解决实际工程应用中城市道路场景重访车载点云位置不一致问题。此外,本文提出的特征点提取算法还可以应用到任何一种点云数据上,具有很强的可行性和实用性。虽然本文方法能够有效完成城市道路场景点云的配准,但是对于提高点云的预处理效率和配准精度还有待进一步研究。
5 参考文献
卢秀山,刘如飞,田茂义,等.利用改进的数学形态法进行车载激光点云地面滤波[J]. 武汉大学学报( 信息科学版) ,2014,39( 5) : 514-519.
LU X S,LIU R F,TIAN M Y,et al. Application of improved mathematical morphology for vehicle-mounted laser point cloud ground filtering[J]. Geomatics and Information Science of Wuhan University,2014,39( 5) : 514-519.
高新,靳国旺,熊新,等.融合差异图与高斯混合模型相结合的SAR 图像变化检测[J]. 测绘科学技术学报,2020,37( 1) : 68-73.
GAO X,JIN G W,XIONG X,et al. Change detection in synthetic aperture radar images based on image fusion and gaussian mixture model[J]. Journal of Geomatics Science and Technology,2020,37( 1) : 68-73.
邹响红,杨必胜,李健平,等.城市场景重访车载点云位置一致性改正[J].测绘科学技术,2019,7( 2) : 101-111.
ZOU X H,YANG B S,LI J P,et al. Position consistency correction of revisit mobile laser scanning point cloud in urban scene[J]. Geomatics Science and Technology,2019,7 ( 2) :101-111.
BESL P J,MCKAY N D. A method for registration of 3-D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1992,14( 2) : 239-256.
STAMOS I,LEORDEANU M. Automated feature-based range registration of urban scenes of large scale[C]∥IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Madison,WI,USA,2003: 555-561.
HU L,XIAO J,WANG Y. An automatic 3D registration method for rock mass point clouds based on plane detection and polygon matching[J]. The Visual Computer,2020,36( 4) : 669-681.
FISCHLER M A,BOLLES R C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography[J].Communications of the ACM,1981,24( 6) : 381-395.
AIGER D,MITRAL N J,COHEN-OR D. 4-points congruent sets for robust pairwise surface registration[J]. ACM Transactions on Graphics,2008,27( 3) : 1-10.
RUSU R B,BLODOW N,BEETZ M. Fast point feature histograms ( FPFH) for 3D registration[C]∥IEEE International Conference on Robotics and Automation. Kobe,Japan,2009: 3212-3217.
YAN L,TAN J X,LIU H,et al. Automatic non-rigid registration of multi-strip point clouds from mobile laser scanning systems [J]. International Journal of Remote Sensing,2018,39( 6) : 1713-1728.
ZHAN X,CAI Y,LI H,et al. A point cloud registration algorithm based on normal vector and particle swarm optimization[J]. Measurement and Control,2020,53( 3) : 265-275.
程效军.海量点云数据处理理论与技术[M]. 上海: 同济大学出版社,2014: 24-28.
CHENG X J. Theory and technology of mass point cloud data proce
CHEN H,BIR B. 3D free-form object recognition in range images using local surface patches[J] Pattern Recognition Letters,2007,28( 10) : 1252-1262.
THEILER P W,WEGNER J D,SCHINDLER K. Keypointbased 4-points congruent sets-automated marker-less registration of laser scans[J]. ISPRS Journal of Photogrammetry and Remote Sensing,2014,96( 10) : 149-163.
HUTTENLOCHER D P. Fast affine point matching: An output sensitive method[C]∥IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Maui,HI,USA,
1991: 263-268.
王佳婧,王晓南,郑顺义,等.三维点云初始配准方法的比较分析[J].测绘科学,2018,43( 2) : 16-23.WANG J J,WANG X N,ZHENG S Y,et al. Comparative analysis of initial registration methods for 3D point clouds[J]. Science of Surveying and Mapping,2018,43( 2) : 16-23.
韩培,舒红,许剑辉.顺序数据同化算法的敏感性分析[J].测绘科学技术学报,2015,32( 5) : 483-488.HAN P,SHU H,XU J H. Sensitivity analysis of sequential data assimilation algorithm[J]. Journal of Geomatics Science and Technology,2015,32( 5) : 483-488.
相关文章:
【论文阅读】利用道路目标特征的多期车载激光点云配准
目录 引 言1 道路场景点云特征2 配准方法2.1 配准基元获取2.2 特征点提取2.3 两期道路场景车载点云的配准 2.3.1 基于特征点的4PCS 粗配准 3 实验与分析4 结论5 参考文献 摘 要 针对车载移动测量系统获取的城市道路点云场景巨大、目标复杂多样,多期道路场景重访车载…...
L---泰拉瑞亚---2023河南萌新联赛第(三)场:郑州大学
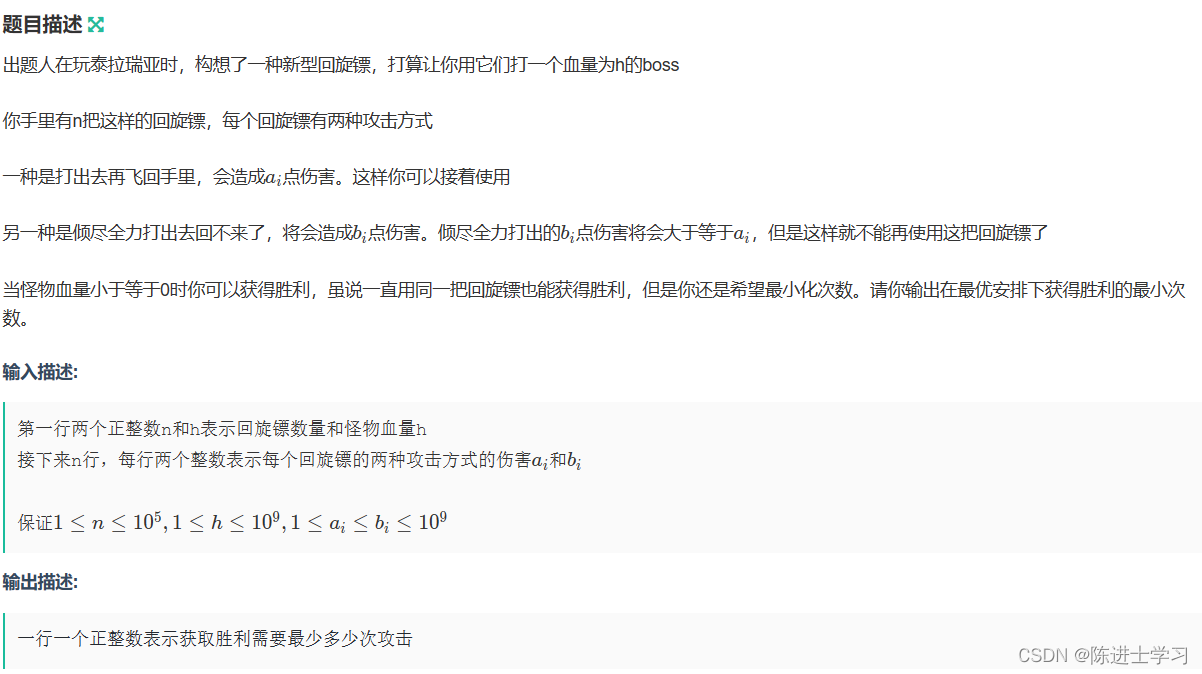
链接:登录—专业IT笔试面试备考平台_牛客网 来源:牛客网 示例1 输入 1 10 3 5 输出 3 说明 只有一把回旋镖,你可以先打两次伤害为3的,再打一次倾尽全力的,造成的伤害为5。总伤害为33511,即可获得胜…...

windows无盘启动技术开发之使用本地镜像文件启动电脑
by fanxiushu 2023-07-26 转载或引用请注明原始作者。 其实使用本地镜像文件启动电脑,这个windows操作系统本身就是自带的功能。 win7以上的系统,制作 vhd或vhdx格式的镜像文件, 然后在镜像文件中安装windows操作系统,然后放到真实…...
PoseiSwap 即将开启质押,利好刺激下 POSE通证短时涨超 30%
随着 Nautilus Chain 主网的上线,预示着 Web3 世界迎来全新的模块化、Layer3 时代,为 Web3 世界与 Web2 世界的深入融合构建基础。而 PoseiSwap 作为 Nautilus Chain 上的首个 DEX,也成为了加密行业首个以模块化为基础构建的 DEX。 基于 Naut…...

Linux文本编辑器-vim
目录 前言 Vim三种模式 打开方式 命令模式 插入模式 可视模式 保存和退出 前言 Vim是一个功能丰富且强大的文本编辑器,被广泛用于Linux系统。它是Vi的增强版本,提供了更多的功能和改进,同时可以通过插件扩展其功能; Vim三…...
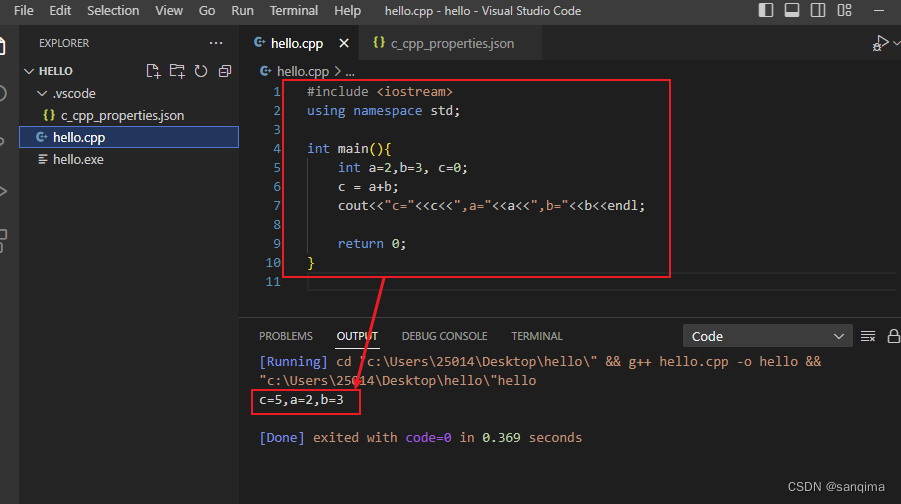
vscode使用g++编译.c文件或.cpp文件
vscode是一个跨平台、轻量级、插件非常丰厚的IDE,这里介绍在vscode里使用g来编译.cpp文件。g也叫GCC, 在Window中,是使用MinGW方式实现g的,它分为32位和64位2个版本,其中,MinGW-64是64位的,MinGW-32是32位的…...

云计算的服务模式包括哪些|PetaExpress云服务商
云计算(cloud computing)它是一种分布式计算,是指通过网络“云”将巨大的数据计算处理程序分解成无数的小程序,然后通过由多个服务器组成的系统进行处理和分析,得到结果并返回给用户。云计算作为一种基于互联网的新型超…...

iOS--通知、代理、单例模式总结
通知 概要 观察者和被观察者都无需知晓对方,只需要通过标记在NSNotificationCenter中找到监听该通知所对应的类,从而调用该类的方法。并且在NSNotificationCenter中,观察者可以只订阅某一特定的通知,并对齐做出相应操作…...

选择最佳安全文件传输方法的重要性
在数字化时代,文件的传输是商务、教育、科研、医学等领域不可或缺的工作流程。为了保障数据安全,选择最佳安全文件传输方法非常关键。在本文中,我们将探讨选择最佳安全文件传输方法的重要性。 第一、最佳安全文件传输方法可以保证文件内容不被…...

IBM LSF 集群虚拟化和工作负载管理解决方案
IBM LSF 集群虚拟化和工作负载管理解决方案 全面综合的工作负载管理解决方案,不仅能够简化 HPC,还能大幅改善用户和管理员体验、可靠性和性能 用途 IBM Spectrum LSF Suites 组合通过为任务关键型 HPC 环境提供集成解决方案,重新定义集群虚…...

C++(14):重载运算与类型转换
当运算符被用于类类型的对象时,允许我们为其指定新的含义;同时,也能自定义类类型之间的转换规则。和内置类型的转换一样,类类型转换隐式地将一种类型的对象转换成另一种我们所需类型的对象。 当运算符作用于类类型的运算对象时&a…...
【深度学习】基于图形的机器学习:概述
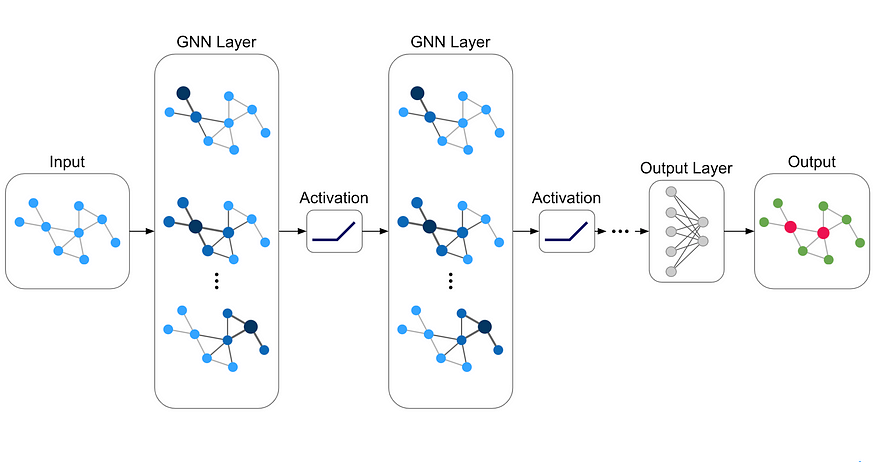
一、说明 图神经网络(GNN)在数据科学和机器学习中越来越受到关注,但在专家圈之外仍然知之甚少。为了掌握这种令人兴奋的方法,我们必须从更广泛的图形机器学习(GML)领域开始。许多在线资源谈论GNN和GML&…...

内存泄漏是什么?有什么危害
内存泄漏是什么?有什么危害 1. 前言1.内存泄漏是什么?2. 为什么会发生内存泄漏3. 内存泄漏的危害4. 总结 1. 前言 在各种项目开发中,内存泄漏是一个很严重的问题。对资源管理、性能优越、系统稳定性,以及是否安全产生极大印象。本…...
【项目设计】基于负载均衡的在线oj平台
目录 一、项目介绍 二、开发环境以及技术 三、概要设计 四、关键算法 五、项目演示 六、代码实现 一、项目介绍 该项目是基于负载均衡的在线oj,模拟平时刷题网站(leetcode和牛客)写的一个在线判题系统 项目主要分为五个模块ÿ…...
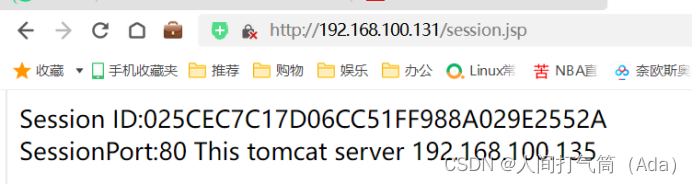
生产环境Session解决方案、Session服务器之Redis
目录 一、服务器配置 二、安装nginx 三、安装配置Tomcat: 四、配置session Session服务器之Redis Redis与Memcached的区别 安装部署redis 一、服务器配置 IP地址 主机名 软件包列表 192.168.100.131 huyang1 nginx 192.168.100.133 huyang3 JDK Tomca…...

SPECjvm2008_1_01 openjdk8 x86_64 ARM64 运行时长、成绩 Run is valid, but not compliant
i5-9600k 架构: x86_64CPU 运行模式: 32-bit, 64-bitAddress sizes: 39 bits physical, 48 bits virtual字节序: Little Endian CPU: 6在线 CPU 列表: …...

安卓:百度地图开发(超详细)
一、百度地图介绍 百度地图SDK是一套供开发者使用的软件开发工具包(SDK),用于在Android应用程序中集成和使用百度地图功能。通过使用百度地图SDK,开发者可以实现在自己的应用中显示地图、获取定位信息、进行搜索、导航等功能。 百…...

DDSv1.4规范(中文版)
实时数据分发 (DDS) V1.4 (2015-04-10正式发布) https://www.omg.org/spec/DDS/1.4/PDF http://www.omg.org/spec/DDS/20140501/dds_dcps.idl...

oracle,获取每日24*60,所有分钟数
前言: 为规范用户的时间录入,因此我们采用下拉的方式,让用户选择需要的时间,因此我们需要将一天24小时的时间拆分为类似00:00,00:01...23:00,23:01,23:59。因此我们需要生成24*601440行的下拉复选值。具体效果如下图所示。 思路 1…...
vue elementui table去掉滚动条与实现表格自动滚动且无滚动条
当table内容列过多时,可通过height属性设置table高度以固定table高度、固定表头,使table内容可以滚动。 现在需求是右侧滚动条不好看,需要去除滚动条,并隐藏滚动条所占列的位置。让他可以滚动但是不出现滚动条,不然即时隐藏了滚动…...

【材料】吸波材料的电导损耗和极化损耗【含Matlab源码 15266期】
💥💥💥💥💥💥💥💥💞💞💞💞💞💞💞💞💞Matlab领域博客之家💞&…...

十分钟用快马AI搭建中科院期刊分区查询工具原型
最近在帮实验室整理投稿期刊清单时,发现中科院分区查询是个高频需求。每次都要登录官网、输入验证码、反复跳转页面,特别影响效率。于是想做个简易查询工具,正好用InsCode(快马)平台试试快速原型开发,没想到十分钟就搭出了可用版本…...

GitHub功能多元拓展,korb工具革新REWE购物流程
【导语:GitHub提供了涵盖AI代码创作、开发者工作流、应用程序安全等多方面的丰富功能,同时推出不同规模和用例的解决方案。而korb命令行工具则为REWE超市购物带来新体验,可实现自动化购物流程。】GitHub:功能全面的开发者平台GitH…...

axios 供应链投毒事件完整报告:史上最大 npm 攻击技术分析
axios 供应链投毒事件完整报告:史上最大 npm 攻击技术分析 2026年3月31日 | 安全分析报告 一、事件概述 2026年3月31日,npm 生态遭遇了有记录以来针对顶级包最复杂的供应链攻击。攻击者劫持了 axios(全球每周下载量超 8300 万次)核心维护者的 npm 账号,发布了两个恶意版…...

Jimeng LoRA环境部署教程:Python+Torch+CUDA兼容性避坑与版本匹配指南
Jimeng LoRA环境部署教程:PythonTorchCUDA兼容性避坑与版本匹配指南 1. 项目简介 Jimeng LoRA(即梦LoRA)是一个专门为LoRA模型测试设计的轻量级文本生成图像系统。这个项目的核心价值在于它能让你只用加载一次基础模型,然后快速…...

保姆级教程:在PX4 SITL仿真中为Iris无人机挂载Kinect、RPLidar和FPV摄像头
PX4仿真环境多传感器集成实战:从零搭建SLAM无人机开发平台 无人机仿真开发中最令人头疼的,莫过于将各类传感器完美集成到飞行平台上。我曾花了整整两周时间调试Kinect和RPLidar在Gazebo中的兼容性问题,直到找到这套经过验证的解决方案。本文将…...

3个核心优势:BG3 Mod Manager的模组管理创新特性
3个核心优势:BG3 Mod Manager的模组管理创新特性 【免费下载链接】BG3ModManager A mod manager for Baldurs Gate 3. This is the only official source! 项目地址: https://gitcode.com/gh_mirrors/bg/BG3ModManager 博德之门3(Baldurs Gate 3&…...
)
intv_ai_mk11效果展示:中文古诗英译+文化注释+押韵风格选择(Shakespearean/Modern)
intv_ai_mk11效果展示:中文古诗英译文化注释押韵风格选择(Shakespearean/Modern) 1. 惊艳的中英古诗翻译能力 intv_ai_mk11在中文古诗翻译领域展现出令人惊叹的能力,不仅能准确传达原诗的意境,还能根据需求选择不同的…...
)
从ONNX到TPU:跨框架模型部署的编译器避坑指南(2023最新版)
从ONNX到TPU:跨框架模型部署的编译器避坑指南(2023最新版) 当ResNet模型在PyTorch中达到99%的测试准确率时,真正的挑战才刚刚开始——如何让这个模型在边缘设备的TPU芯片上高效运行?这个问题困扰着85%的AI工程师。本文…...

深入解析Python中ort.InferenceSession的底层实现与性能优化
1. 揭开ort.InferenceSession的神秘面纱 第一次接触ort.InferenceSession时,我完全被它的性能震惊了。作为一个用Python加载ONNX模型的标准入口,它看起来就是个普通的类实例化操作,但背后却隐藏着C和Python的完美协作。这种设计让开发者既能享…...