SRS开源代码框架,协程库state-threads的使用
本章内容解读SRS开源代码框架,无二次开发,以学习交流为目的。
SRS是国人开发的流媒体服务器,C++语言开发,本章使用版本:https://github.com/ossrs/srs/tree/5.0release。
目录
- SRS协程库ST的使用
- 源码
- ST协程库测试
- SrsAutoFree测试
SRS协程库ST的使用
C语言协程库state-threads(简称ST库):https://sourceforge.net/projects/state-threads/。
SRS对state-threads库进行了2次开发:https://github.com/ossrs/state-threads。
1、ST库的编译
在下载的srs-5.0release.zip安装包里有ST源码,直接编译:
cd /srs-5.0release/trunk/3rdparty/st-srs
make linux-debug #编译
在构建目录生成库文件libst.a,头文件st.h。
2、ST库的使用
SRS封装了协程类SrsSTCoroutine,通过C++类的继承和虚函数回调,实现了在回调函数执行协程处理函数(和linux线程库函数pthread_create用法类似)。
这部分代码还包含了SrsAutoFree定义,可以在离开作用域时自动释放指针,也是很有用的一个模块。
源码
源码结构如下:
├── chw_adapt.h
├── srs_app_st.cpp
├── srs_app_st.hpp
├── srs_kernel_error.cpp
├── srs_kernel_error.hpp
├── srs_kernel_io.cpp
├── srs_kernel_io.hpp
├── srs_protocol_io.cpp
├── srs_protocol_io.hpp
├── srs_protocol_st.cpp
└── srs_protocol_st.hpp
其中srs_kernel_io、srs_protocol_io和SRS源码一样,可以在SRS源码里找,srs_kernel_error源码参考这里:SRS开源代码框架,错误类(SrsCplxError)的使用。
日志打印使用printf代替,上下文SrsContextId使用std::string代替。
chw_adapt.h
#ifndef CHW_ADAPT_H
#define CHW_ADAPT_H#include <string>
typedef std::string SrsContextId; //减少依赖,上下文ID使用SrsContextId代替
typedef int64_t srs_utime_t;
#define SRS_UTIME_MILLISECONDS 1000
#define srsu2ms(us) ((us) / SRS_UTIME_MILLISECONDS)
#define srsu2msi(us) int((us) / SRS_UTIME_MILLISECONDS)// Never timeout.
#define SRS_UTIME_NO_TIMEOUT ((srs_utime_t) -1LL)// To delete object.
#define SrsAutoFree(className, instance) \impl_SrsAutoFree<className> _auto_free_##instance(&instance, false, false, NULL)
// To delete array.
#define SrsAutoFreeA(className, instance) \impl_SrsAutoFree<className> _auto_free_array_##instance(&instance, true, false, NULL)
// Use free instead of delete.
#define SrsAutoFreeF(className, instance) \impl_SrsAutoFree<className> _auto_free_##instance(&instance, false, true, NULL)
// Use hook instead of delete.
#define SrsAutoFreeH(className, instance, hook) \impl_SrsAutoFree<className> _auto_free_##instance(&instance, false, false, hook)
// The template implementation.
template<class T>
class impl_SrsAutoFree
{
private:T** ptr;bool is_array;bool _use_free;void (*_hook)(T*);
public:// If use_free, use free(void*) to release the p.// If specified hook, use hook(p) to release it.// Use delete to release p, or delete[] if p is an array.impl_SrsAutoFree(T** p, bool array, bool use_free, void (*hook)(T*)) {ptr = p;is_array = array;_use_free = use_free;_hook = hook;}virtual ~impl_SrsAutoFree() {if (ptr == NULL || *ptr == NULL) {return;}if (_use_free) {free(*ptr);} else if (_hook) {_hook(*ptr);} else {if (is_array) {delete[] *ptr;} else {delete *ptr;}}*ptr = NULL;}
};#endif // CHW_ADAPT_H
srs_app_st.hpp
#ifndef SRS_APP_ST_HPP
#define SRS_APP_ST_HPP#include <string>
#include "chw_adapt.h"#include <srs_kernel_error.hpp>
#include <srs_protocol_st.hpp>class SrsFastCoroutine;
// 每个协程都要继承这个类
class ISrsCoroutineHandler
{
public:ISrsCoroutineHandler();virtual ~ISrsCoroutineHandler();
public:// Do the work. The ST-coroutine will terminated normally if it returned.// @remark If the cycle has its own loop, it must check the thread pull.// 协程处理函数,如果返回则协程结束virtual srs_error_t cycle() = 0;
};// Start the object, generally a croutine.
// 通常是启动一个ST对象
class ISrsStartable
{
public:ISrsStartable();virtual ~ISrsStartable();
public:virtual srs_error_t start() = 0;
};// The corotine object.
// 协程基类
class SrsCoroutine : public ISrsStartable
{
public:SrsCoroutine();virtual ~SrsCoroutine();
public:virtual void stop() = 0;virtual void interrupt() = 0;// @return a copy of error, which should be freed by user.// NULL if not terminated and user should pull again.virtual srs_error_t pull() = 0;// Get and set the context id of coroutine.virtual const SrsContextId& cid() = 0;virtual void set_cid(const SrsContextId& cid) = 0;
};// An empty coroutine, user can default to this object before create any real coroutine.
// @see https://github.com/ossrs/srs/pull/908
// 一个空的协程,用户可以在创建任何真正的协程序之前默认为这个对象。
class SrsDummyCoroutine : public SrsCoroutine
{
private:SrsContextId cid_;
public:SrsDummyCoroutine();virtual ~SrsDummyCoroutine();
public:virtual srs_error_t start();virtual void stop();virtual void interrupt();virtual srs_error_t pull();virtual const SrsContextId& cid();virtual void set_cid(const SrsContextId& cid);
};// A ST-coroutine is a lightweight thread, just like the goroutine.
// But the goroutine maybe run on different thread, while ST-coroutine only
// run in single thread, because it use setjmp and longjmp, so it may cause
// problem in multiple threads. For SRS, we only use single thread module,
// like NGINX to get very high performance, with asynchronous and non-blocking
// sockets.
// ST-coroutine是一个轻量级的线程,就像goroutine一样。
// 但是goroutine可能在不同的线程上运行,而ST-coroutine只在单个线程中运行,因为它使用了setjmp和longjmp,所以它可能会在多个线程中导致问题。
// 对于SRS,我们只使用单线程模块,类似NGINX,来获得非常高的性能,具有异步和非阻塞套接字。
// @reamrk For multiple processes, please use go-oryx to fork many SRS processes.
// 对于多个进程,请使用go-oryx来fork多个SRS进程。
// Please read https://github.com/ossrs/go-oryx
// @remark For debugging of ST-coroutine, read _st_iterate_threads_flag of ST/README
// https://github.com/ossrs/state-threads/blob/st-1.9/README#L115
// @remark We always create joinable thread, so we must join it or memory leak,
// Please read https://github.com/ossrs/srs/issues/78
class SrsSTCoroutine : public SrsCoroutine
{
private:SrsFastCoroutine* impl_;
public:// Create a thread with name n and handler h.// @remark User can specify a cid for thread to use, or we will allocate a new one.SrsSTCoroutine(std::string n, ISrsCoroutineHandler* h);SrsSTCoroutine(std::string n, ISrsCoroutineHandler* h, SrsContextId cid);virtual ~SrsSTCoroutine();
public:// Set the stack size of coroutine, default to 0(64KB).void set_stack_size(int v);
public:// Start the thread.// @remark Should never start it when stopped or terminated.virtual srs_error_t start();// Interrupt the thread then wait to terminated.// @remark If user want to notify thread to quit async, for example if there are// many threads to stop like the encoder, use the interrupt to notify all threads// to terminate then use stop to wait for each to terminate.virtual void stop();// Interrupt the thread and notify it to terminate, it will be wakeup if it's blocked// in some IO operations, such as st_read or st_write, then it will found should quit,// finally the thread should terminated normally, user can use the stop to join it.virtual void interrupt();// Check whether thread is terminated normally or error(stopped or termianted with error),// and the thread should be running if it return ERROR_SUCCESS.// @remark Return specified error when thread terminated normally with error.// @remark Return ERROR_THREAD_TERMINATED when thread terminated normally without error.// @remark Return ERROR_THREAD_INTERRUPED when thread is interrupted.virtual srs_error_t pull();// Get and set the context id of thread.virtual const SrsContextId& cid();virtual void set_cid(const SrsContextId& cid);
};// High performance coroutine.
// 高性能协程
class SrsFastCoroutine
{
private:std::string name;int stack_size;ISrsCoroutineHandler* handler;
private:srs_thread_t trd;SrsContextId cid_;srs_error_t trd_err;
private:bool started;bool interrupted;bool disposed;// Cycle done, no need to interrupt it.bool cycle_done;
private:// Sub state in disposed, we need to wait for thread to quit.// 子状态被处理后,我们需要等待线程退出。bool stopping_;SrsContextId stopping_cid_;
public:SrsFastCoroutine(std::string n, ISrsCoroutineHandler* h);SrsFastCoroutine(std::string n, ISrsCoroutineHandler* h, SrsContextId cid);virtual ~SrsFastCoroutine();
public:void set_stack_size(int v);
public:srs_error_t start();void stop();void interrupt();inline srs_error_t pull() {if (trd_err == srs_success) {return srs_success;}return srs_error_copy(trd_err);}const SrsContextId& cid();virtual void set_cid(const SrsContextId& cid);
private:srs_error_t cycle();static void* pfn(void* arg);
};// Like goroutine sync.WaitGroup.
// 类似go语言的sync.WaitGroup
class SrsWaitGroup
{
private:int nn_;srs_cond_t done_;
public:SrsWaitGroup();virtual ~SrsWaitGroup();
public:// When start for n coroutines.void add(int n);// When coroutine is done.void done();// Wait for all corotine to be done.void wait();
};#endifsrs_app_st.cpp
#include <srs_app_st.hpp>#include <string>
using namespace std;#include <srs_kernel_error.hpp>ISrsCoroutineHandler::ISrsCoroutineHandler()
{
}ISrsCoroutineHandler::~ISrsCoroutineHandler()
{
}ISrsStartable::ISrsStartable()
{
}ISrsStartable::~ISrsStartable()
{
}SrsCoroutine::SrsCoroutine()
{
}SrsCoroutine::~SrsCoroutine()
{
}SrsDummyCoroutine::SrsDummyCoroutine()
{
}SrsDummyCoroutine::~SrsDummyCoroutine()
{
}srs_error_t SrsDummyCoroutine::start()
{return srs_error_new(ERROR_THREAD, "dummy coroutine");
}void SrsDummyCoroutine::stop()
{
}void SrsDummyCoroutine::interrupt()
{
}srs_error_t SrsDummyCoroutine::pull()
{return srs_error_new(ERROR_THREAD, "dummy pull");
}const SrsContextId& SrsDummyCoroutine::cid()
{return cid_;
}void SrsDummyCoroutine::set_cid(const SrsContextId& cid)
{cid_ = cid;
}SrsSTCoroutine::SrsSTCoroutine(string n, ISrsCoroutineHandler* h)
{impl_ = new SrsFastCoroutine(n, h);
}SrsSTCoroutine::SrsSTCoroutine(string n, ISrsCoroutineHandler* h, SrsContextId cid)
{impl_ = new SrsFastCoroutine(n, h, cid);
}SrsSTCoroutine::~SrsSTCoroutine()
{srs_freep(impl_);
}void SrsSTCoroutine::set_stack_size(int v)
{impl_->set_stack_size(v);
}srs_error_t SrsSTCoroutine::start()
{return impl_->start();
}void SrsSTCoroutine::stop()
{impl_->stop();
}void SrsSTCoroutine::interrupt()
{impl_->interrupt();
}srs_error_t SrsSTCoroutine::pull()
{return impl_->pull();
}const SrsContextId& SrsSTCoroutine::cid()
{return impl_->cid();
}void SrsSTCoroutine::set_cid(const SrsContextId& cid)
{impl_->set_cid(cid);
}SrsFastCoroutine::SrsFastCoroutine(string n, ISrsCoroutineHandler* h)
{// TODO: FIXME: Reduce duplicated code.name = n;handler = h;trd = NULL;trd_err = srs_success;started = interrupted = disposed = cycle_done = false;stopping_ = false;// 0 use default, default is 64K.stack_size = 0;
}SrsFastCoroutine::SrsFastCoroutine(string n, ISrsCoroutineHandler* h, SrsContextId cid)
{name = n;handler = h;cid_ = cid;trd = NULL;trd_err = srs_success;started = interrupted = disposed = cycle_done = false;stopping_ = false;// 0 use default, default is 64K.stack_size = 0;
}SrsFastCoroutine::~SrsFastCoroutine()
{stop();// TODO: FIXME: We must assert the cycle is done.srs_freep(trd_err);
}void SrsFastCoroutine::set_stack_size(int v)
{stack_size = v;
}srs_error_t SrsFastCoroutine::start()
{srs_error_t err = srs_success;if (started || disposed) {if (disposed) {err = srs_error_new(ERROR_THREAD, "disposed");} else {err = srs_error_new(ERROR_THREAD, "started");}if (trd_err == srs_success) {trd_err = srs_error_copy(err);}return err;}if ((trd = (srs_thread_t)_pfn_st_thread_create(pfn, this, 1, stack_size)) == NULL) {err = srs_error_new(ERROR_THREAD, "create failed");srs_freep(trd_err);trd_err = srs_error_copy(err);return err;}started = true;return err;
}void SrsFastCoroutine::stop()
{if (disposed) {if (stopping_) {/*srs_error*/printf("thread is stopping by %s\n", stopping_cid_.c_str());srs_assert(!stopping_);}return;}disposed = true;stopping_ = true;interrupt();// When not started, the trd is NULL.if (trd) {void* res = NULL;int r0 = srs_thread_join(trd, &res);if (r0) {// By st_thread_joinif (errno == EINVAL) srs_assert(!r0);if (errno == EDEADLK) srs_assert(!r0);// By st_cond_timedwaitif (errno == EINTR) srs_assert(!r0);if (errno == ETIME) srs_assert(!r0);// Otherssrs_assert(!r0);}srs_error_t err_res = (srs_error_t)res;if (err_res != srs_success) {// When worker cycle done, the error has already been overrided,// so the trd_err should be equal to err_res.srs_assert(trd_err == err_res);}}// If there's no error occur from worker, try to set to terminated error.if (trd_err == srs_success && !cycle_done) {trd_err = srs_error_new(ERROR_THREAD, "terminated");}// Now, we'are stopped.stopping_ = false;return;
}void SrsFastCoroutine::interrupt()
{if (!started || interrupted || cycle_done) {return;}interrupted = true;if (trd_err == srs_success) {trd_err = srs_error_new(ERROR_THREAD, "interrupted");}// Note that if another thread is stopping thread and waiting in st_thread_join,// the interrupt will make the st_thread_join fail.srs_thread_interrupt(trd);
}const SrsContextId& SrsFastCoroutine::cid()
{return cid_;
}void SrsFastCoroutine::set_cid(const SrsContextId& cid)
{cid_ = cid;
// srs_context_set_cid_of(trd, cid);
}srs_error_t SrsFastCoroutine::cycle()
{
// if (_srs_context) {
// if (cid_.empty()) {
// cid_ = _srs_context->generate_id();
// }
// _srs_context->set_id(cid_);
// }srs_error_t err = handler->cycle();if (err != srs_success) {return srs_error_wrap(err, "coroutine cycle");}// Set cycle done, no need to interrupt it.cycle_done = true;return err;
}void* SrsFastCoroutine::pfn(void* arg)
{SrsFastCoroutine* p = (SrsFastCoroutine*)arg;srs_error_t err = p->cycle();// Set the err for function pull to fetch it.// @see https://github.com/ossrs/srs/pull/1304#issuecomment-480484151if (err != srs_success) {srs_freep(p->trd_err);// It's ok to directly use it, because it's returned by st_thread_join.p->trd_err = err;}return (void*)err;
}SrsWaitGroup::SrsWaitGroup()
{nn_ = 0;done_ = srs_cond_new();
}SrsWaitGroup::~SrsWaitGroup()
{wait();srs_cond_destroy(done_);
}void SrsWaitGroup::add(int n)
{nn_ += n;
}void SrsWaitGroup::done()
{nn_--;if (nn_ <= 0) {srs_cond_signal(done_);}
}void SrsWaitGroup::wait()
{if (nn_ > 0) {srs_cond_wait(done_);}
}
srs_protocol_st.hpp
#ifndef SRS_PROTOCOL_ST_HPP
#define SRS_PROTOCOL_ST_HPP#include "chw_adapt.h"
#include <string>#include <srs_kernel_error.hpp>
#include "srs_protocol_io.hpp"// Wrap for coroutine.
typedef void* srs_netfd_t;
typedef void* srs_thread_t;
typedef void* srs_cond_t;
typedef void* srs_mutex_t;// Initialize ST, requires epoll for linux.
extern srs_error_t srs_st_init();
// Destroy ST, free resources for asan detecting.
extern void srs_st_destroy(void);// Close the netfd, and close the underlayer fd.
// @remark when close, user must ensure io completed.
extern void srs_close_stfd(srs_netfd_t& stfd);// Set the FD_CLOEXEC of FD.
extern srs_error_t srs_fd_closeexec(int fd);// Set the SO_REUSEADDR of fd.
extern srs_error_t srs_fd_reuseaddr(int fd);// Set the SO_REUSEPORT of fd.
extern srs_error_t srs_fd_reuseport(int fd);// Set the SO_KEEPALIVE of fd.
extern srs_error_t srs_fd_keepalive(int fd);// Get current coroutine/thread.
extern srs_thread_t srs_thread_self();
extern void srs_thread_exit(void* retval);
extern int srs_thread_join(srs_thread_t thread, void **retvalp);
extern void srs_thread_interrupt(srs_thread_t thread);
extern void srs_thread_yield();// For utest to mock the thread create.
typedef void* (*_ST_THREAD_CREATE_PFN)(void *(*start)(void *arg), void *arg, int joinable, int stack_size);
extern _ST_THREAD_CREATE_PFN _pfn_st_thread_create;// For client, to open socket and connect to server.
// @param tm The timeout in srs_utime_t.
extern srs_error_t srs_tcp_connect(std::string server, int port, srs_utime_t tm, srs_netfd_t* pstfd);// For server, listen at TCP endpoint.
extern srs_error_t srs_tcp_listen(std::string ip, int port, srs_netfd_t* pfd);// For server, listen at UDP endpoint.
extern srs_error_t srs_udp_listen(std::string ip, int port, srs_netfd_t* pfd);// Wrap for coroutine.
extern srs_cond_t srs_cond_new();
extern int srs_cond_destroy(srs_cond_t cond);
extern int srs_cond_wait(srs_cond_t cond);
extern int srs_cond_timedwait(srs_cond_t cond, srs_utime_t timeout);
extern int srs_cond_signal(srs_cond_t cond);
extern int srs_cond_broadcast(srs_cond_t cond);extern srs_mutex_t srs_mutex_new();
extern int srs_mutex_destroy(srs_mutex_t mutex);
extern int srs_mutex_lock(srs_mutex_t mutex);
extern int srs_mutex_unlock(srs_mutex_t mutex);extern int srs_key_create(int* keyp, void (*destructor)(void*));
extern int srs_thread_setspecific(int key, void* value);
extern int srs_thread_setspecific2(srs_thread_t thread, int key, void* value);
extern void* srs_thread_getspecific(int key);extern int srs_netfd_fileno(srs_netfd_t stfd);extern int srs_usleep(srs_utime_t usecs);extern srs_netfd_t srs_netfd_open_socket(int osfd);
extern srs_netfd_t srs_netfd_open(int osfd);extern int srs_recvfrom(srs_netfd_t stfd, void *buf, int len, struct sockaddr *from, int *fromlen, srs_utime_t timeout);
extern int srs_sendto(srs_netfd_t stfd, void *buf, int len, const struct sockaddr *to, int tolen, srs_utime_t timeout);
extern int srs_recvmsg(srs_netfd_t stfd, struct msghdr *msg, int flags, srs_utime_t timeout);
extern int srs_sendmsg(srs_netfd_t stfd, const struct msghdr *msg, int flags, srs_utime_t timeout);extern srs_netfd_t srs_accept(srs_netfd_t stfd, struct sockaddr *addr, int *addrlen, srs_utime_t timeout);extern ssize_t srs_read(srs_netfd_t stfd, void *buf, size_t nbyte, srs_utime_t timeout);extern bool srs_is_never_timeout(srs_utime_t tm);// The mutex locker.
#define SrsLocker(instance) \impl__SrsLocker _SRS_free_##instance(&instance)class impl__SrsLocker
{
private:srs_mutex_t* lock;
public:impl__SrsLocker(srs_mutex_t* l) {lock = l;int r0 = srs_mutex_lock(*lock);srs_assert(!r0);}virtual ~impl__SrsLocker() {int r0 = srs_mutex_unlock(*lock);srs_assert(!r0);}
};// the socket provides TCP socket over st,
// that is, the sync socket mechanism.
class SrsStSocket : public ISrsProtocolReadWriter
{
private:// The recv/send timeout in srs_utime_t.// @remark Use SRS_UTIME_NO_TIMEOUT for never timeout.srs_utime_t rtm;srs_utime_t stm;// The recv/send data in bytesint64_t rbytes;int64_t sbytes;// The underlayer st fd.srs_netfd_t stfd_;
public:SrsStSocket();SrsStSocket(srs_netfd_t fd);virtual ~SrsStSocket();
private:void init(srs_netfd_t fd);
public:virtual void set_recv_timeout(srs_utime_t tm);virtual srs_utime_t get_recv_timeout();virtual void set_send_timeout(srs_utime_t tm);virtual srs_utime_t get_send_timeout();virtual int64_t get_recv_bytes();virtual int64_t get_send_bytes();
public:// @param nread, the actual read bytes, ignore if NULL.virtual srs_error_t read(void* buf, size_t size, ssize_t* nread);virtual srs_error_t read_fully(void* buf, size_t size, ssize_t* nread);// @param nwrite, the actual write bytes, ignore if NULL.virtual srs_error_t write(void* buf, size_t size, ssize_t* nwrite);virtual srs_error_t writev(const iovec *iov, int iov_size, ssize_t* nwrite);
};// The client to connect to server over TCP.
// User must never reuse the client when close it.
// Usage:
// SrsTcpClient client("127.0.0.1", 1935, 9 * SRS_UTIME_SECONDS);
// client.connect();
// client.write("Hello world!", 12, NULL);
// client.read(buf, 4096, NULL);
// @remark User can directly free the object, which will close the fd.
class SrsTcpClient : public ISrsProtocolReadWriter
{
private:srs_netfd_t stfd_;SrsStSocket* io;
private:std::string host;int port;// The timeout in srs_utime_t.srs_utime_t timeout;
public:// Constructor.// @param h the ip or hostname of server.// @param p the port to connect to.// @param tm the timeout in srs_utime_t.SrsTcpClient(std::string h, int p, srs_utime_t tm);virtual ~SrsTcpClient();
public:// Connect to server over TCP.// @remark We will close the exists connection before do connect.virtual srs_error_t connect();
// Interface ISrsProtocolReadWriter
public:virtual void set_recv_timeout(srs_utime_t tm);virtual srs_utime_t get_recv_timeout();virtual void set_send_timeout(srs_utime_t tm);virtual srs_utime_t get_send_timeout();virtual int64_t get_recv_bytes();virtual int64_t get_send_bytes();virtual srs_error_t read(void* buf, size_t size, ssize_t* nread);virtual srs_error_t read_fully(void* buf, size_t size, ssize_t* nread);virtual srs_error_t write(void* buf, size_t size, ssize_t* nwrite);virtual srs_error_t writev(const iovec *iov, int iov_size, ssize_t* nwrite);
};#endif
srs_protocol_st.cpp
#include <srs_protocol_st.hpp>#include <st.h>
#include <fcntl.h>
#include <sys/socket.h>
#include <netdb.h>
#include <string.h>
using namespace std;
#include <srs_kernel_error.hpp>// nginx also set to 512
#define SERVER_LISTEN_BACKLOG 512#ifdef __linux__
#include <sys/epoll.h>bool srs_st_epoll_is_supported(void)
{struct epoll_event ev;ev.events = EPOLLIN;ev.data.ptr = NULL;/* Guaranteed to fail */epoll_ctl(-1, EPOLL_CTL_ADD, -1, &ev);return (errno != ENOSYS);
}
#endifsrs_error_t srs_st_init()
{
#ifdef __linux__// check epoll, some old linux donot support epoll.if (!srs_st_epoll_is_supported()) {return srs_error_new(ERROR_THREAD, "linux epoll disabled");}
#endif// Select the best event system available on the OS. In Linux this is// epoll(). On BSD it will be kqueue.
#if defined(SRS_CYGWIN64)if (st_set_eventsys(ST_EVENTSYS_SELECT) == -1) {return srs_error_new(ERROR_ST_SET_SELECT, "st enable st failed, current is %s", st_get_eventsys_name());}
#elseif (st_set_eventsys(ST_EVENTSYS_ALT) == -1) {return srs_error_new(ERROR_THREAD, "st enable st failed, current is %s", st_get_eventsys_name());}
#endif// Before ST init, we might have already initialized the background cid.
// SrsContextId cid = _srs_context->get_id();
// if (cid.empty()) {
// cid = _srs_context->generate_id();
// }int r0 = 0;if((r0 = st_init()) != 0){return srs_error_new(ERROR_THREAD, "st initialize failed, r0=%d", r0);}// Switch to the background cid.
// _srs_context->set_id(cid);printf("st_init success, use %s", st_get_eventsys_name());return srs_success;
}void srs_st_destroy(void)
{st_destroy();
}void srs_close_stfd(srs_netfd_t& stfd)
{if (stfd) {// we must ensure the close is ok.int r0 = st_netfd_close((st_netfd_t)stfd);if (r0) {// By _st_epoll_fd_close or _st_kq_fd_closeif (errno == EBUSY) srs_assert(!r0);// By closeif (errno == EBADF) srs_assert(!r0);if (errno == EINTR) srs_assert(!r0);if (errno == EIO) srs_assert(!r0);// Otherssrs_assert(!r0);}stfd = NULL;}
}srs_error_t srs_fd_closeexec(int fd)
{int flags = fcntl(fd, F_GETFD);flags |= FD_CLOEXEC;if (fcntl(fd, F_SETFD, flags) == -1) {return srs_error_new(ERROR_THREAD, "FD_CLOEXEC fd=%d", fd);}return srs_success;
}srs_error_t srs_fd_reuseaddr(int fd)
{int v = 1;if (setsockopt(fd, SOL_SOCKET, SO_REUSEADDR, &v, sizeof(int)) == -1) {return srs_error_new(ERROR_THREAD, "SO_REUSEADDR fd=%d", fd);}return srs_success;
}srs_error_t srs_fd_reuseport(int fd)
{
#if defined(SO_REUSEPORT)int v = 1;if (setsockopt(fd, SOL_SOCKET, SO_REUSEPORT, &v, sizeof(int)) == -1) {printf("SO_REUSEPORT failed for fd=%d", fd);}
#else#warning "SO_REUSEPORT is not supported by your OS"srs_warn("SO_REUSEPORT is not supported util Linux kernel 3.9");
#endifreturn srs_success;
}srs_error_t srs_fd_keepalive(int fd)
{
#ifdef SO_KEEPALIVEint v = 1;if (setsockopt(fd, SOL_SOCKET, SO_KEEPALIVE, &v, sizeof(int)) == -1) {return srs_error_new(ERROR_THREAD, "SO_KEEPALIVE fd=%d", fd);}
#endifreturn srs_success;
}srs_thread_t srs_thread_self()
{return (srs_thread_t)st_thread_self();
}void srs_thread_exit(void* retval)
{st_thread_exit(retval);
}int srs_thread_join(srs_thread_t thread, void **retvalp)
{return st_thread_join((st_thread_t)thread, retvalp);
}void srs_thread_interrupt(srs_thread_t thread)
{st_thread_interrupt((st_thread_t)thread);
}void srs_thread_yield()
{st_thread_yield();
}_ST_THREAD_CREATE_PFN _pfn_st_thread_create = (_ST_THREAD_CREATE_PFN)st_thread_create;srs_error_t srs_tcp_connect(string server, int port, srs_utime_t tm, srs_netfd_t* pstfd)
{st_utime_t timeout = ST_UTIME_NO_TIMEOUT;if (tm != SRS_UTIME_NO_TIMEOUT) {timeout = tm;}*pstfd = NULL;srs_netfd_t stfd = NULL;char sport[8];int r0 = snprintf(sport, sizeof(sport), "%d", port);srs_assert(r0 > 0 && r0 < (int)sizeof(sport));addrinfo hints;memset(&hints, 0, sizeof(hints));hints.ai_family = AF_UNSPEC;hints.ai_socktype = SOCK_STREAM;addrinfo* r = NULL;SrsAutoFreeH(addrinfo, r, freeaddrinfo);if(getaddrinfo(server.c_str(), sport, (const addrinfo*)&hints, &r)) {return srs_error_new(ERROR_THREAD, "get address info");}int sock = socket(r->ai_family, r->ai_socktype, r->ai_protocol);if(sock == -1){return srs_error_new(ERROR_SOCKET_CREATE, "create socket");}srs_assert(!stfd);stfd = st_netfd_open_socket(sock);if(stfd == NULL){::close(sock);return srs_error_new(ERROR_THREAD, "open socket");}if (st_connect((st_netfd_t)stfd, r->ai_addr, r->ai_addrlen, timeout) == -1){srs_close_stfd(stfd);return srs_error_new(ERROR_THREAD, "connect to %s:%d", server.c_str(), port);}*pstfd = stfd;return srs_success;
}srs_error_t do_srs_tcp_listen(int fd, addrinfo* r, srs_netfd_t* pfd)
{srs_error_t err = srs_success;// Detect alive for TCP connection.// @see https://github.com/ossrs/srs/issues/1044if ((err = srs_fd_keepalive(fd)) != srs_success) {return srs_error_wrap(err, "set keepalive");}if ((err = srs_fd_closeexec(fd)) != srs_success) {return srs_error_wrap(err, "set closeexec");}if ((err = srs_fd_reuseaddr(fd)) != srs_success) {return srs_error_wrap(err, "set reuseaddr");}if ((err = srs_fd_reuseport(fd)) != srs_success) {return srs_error_wrap(err, "set reuseport");}if (::bind(fd, r->ai_addr, r->ai_addrlen) == -1) {return srs_error_new(ERROR_THREAD, "bind");}if (::listen(fd, SERVER_LISTEN_BACKLOG) == -1) {return srs_error_new(ERROR_THREAD, "listen");}if ((*pfd = srs_netfd_open_socket(fd)) == NULL){return srs_error_new(ERROR_THREAD, "st open");}return err;
}srs_error_t srs_tcp_listen(std::string ip, int port, srs_netfd_t* pfd)
{srs_error_t err = srs_success;char sport[8];int r0 = snprintf(sport, sizeof(sport), "%d", port);srs_assert(r0 > 0 && r0 < (int)sizeof(sport));addrinfo hints;memset(&hints, 0, sizeof(hints));hints.ai_family = AF_UNSPEC;hints.ai_socktype = SOCK_STREAM;hints.ai_flags = AI_NUMERICHOST;addrinfo* r = NULL;SrsAutoFreeH(addrinfo, r, freeaddrinfo);if(getaddrinfo(ip.c_str(), sport, (const addrinfo*)&hints, &r)) {return srs_error_new(ERROR_THREAD, "getaddrinfo hints=(%d,%d,%d)",hints.ai_family, hints.ai_socktype, hints.ai_flags);}int fd = 0;if ((fd = socket(r->ai_family, r->ai_socktype, r->ai_protocol)) == -1) {return srs_error_new(ERROR_SOCKET_CREATE, "socket domain=%d, type=%d, protocol=%d",r->ai_family, r->ai_socktype, r->ai_protocol);}if ((err = do_srs_tcp_listen(fd, r, pfd)) != srs_success) {::close(fd);return srs_error_wrap(err, "fd=%d", fd);}return err;
}srs_error_t do_srs_udp_listen(int fd, addrinfo* r, srs_netfd_t* pfd)
{srs_error_t err = srs_success;if ((err = srs_fd_closeexec(fd)) != srs_success) {return srs_error_wrap(err, "set closeexec");}if ((err = srs_fd_reuseaddr(fd)) != srs_success) {return srs_error_wrap(err, "set reuseaddr");}if ((err = srs_fd_reuseport(fd)) != srs_success) {return srs_error_wrap(err, "set reuseport");}if (::bind(fd, r->ai_addr, r->ai_addrlen) == -1) {return srs_error_new(ERROR_THREAD, "bind");}if ((*pfd = srs_netfd_open_socket(fd)) == NULL){return srs_error_new(ERROR_THREAD, "st open");}return err;
}srs_error_t srs_udp_listen(std::string ip, int port, srs_netfd_t* pfd)
{srs_error_t err = srs_success;char sport[8];int r0 = snprintf(sport, sizeof(sport), "%d", port);srs_assert(r0 > 0 && r0 < (int)sizeof(sport));addrinfo hints;memset(&hints, 0, sizeof(hints));hints.ai_family = AF_UNSPEC;hints.ai_socktype = SOCK_DGRAM;hints.ai_flags = AI_NUMERICHOST;addrinfo* r = NULL;SrsAutoFreeH(addrinfo, r, freeaddrinfo);if(getaddrinfo(ip.c_str(), sport, (const addrinfo*)&hints, &r)) {return srs_error_new(ERROR_THREAD, "getaddrinfo hints=(%d,%d,%d)",hints.ai_family, hints.ai_socktype, hints.ai_flags);}int fd = 0;if ((fd = socket(r->ai_family, r->ai_socktype, r->ai_protocol)) == -1) {return srs_error_new(ERROR_SOCKET_CREATE, "socket domain=%d, type=%d, protocol=%d",r->ai_family, r->ai_socktype, r->ai_protocol);}if ((err = do_srs_udp_listen(fd, r, pfd)) != srs_success) {::close(fd);return srs_error_wrap(err, "fd=%d", fd);}return err;
}srs_cond_t srs_cond_new()
{return (srs_cond_t)st_cond_new();
}int srs_cond_destroy(srs_cond_t cond)
{return st_cond_destroy((st_cond_t)cond);
}int srs_cond_wait(srs_cond_t cond)
{return st_cond_wait((st_cond_t)cond);
}int srs_cond_timedwait(srs_cond_t cond, srs_utime_t timeout)
{return st_cond_timedwait((st_cond_t)cond, (st_utime_t)timeout);
}int srs_cond_signal(srs_cond_t cond)
{return st_cond_signal((st_cond_t)cond);
}int srs_cond_broadcast(srs_cond_t cond)
{return st_cond_broadcast((st_cond_t)cond);
}srs_mutex_t srs_mutex_new()
{return (srs_mutex_t)st_mutex_new();
}int srs_mutex_destroy(srs_mutex_t mutex)
{if (!mutex) {return 0;}return st_mutex_destroy((st_mutex_t)mutex);
}int srs_mutex_lock(srs_mutex_t mutex)
{return st_mutex_lock((st_mutex_t)mutex);
}int srs_mutex_unlock(srs_mutex_t mutex)
{return st_mutex_unlock((st_mutex_t)mutex);
}int srs_key_create(int *keyp, void (*destructor)(void *))
{return st_key_create(keyp, destructor);
}int srs_thread_setspecific(int key, void *value)
{return st_thread_setspecific(key, value);
}void *srs_thread_getspecific(int key)
{return st_thread_getspecific(key);
}int srs_thread_setspecific2(srs_thread_t thread, int key, void* value)
{return st_thread_setspecific2((st_thread_t)thread, key, value);
}int srs_netfd_fileno(srs_netfd_t stfd)
{return st_netfd_fileno((st_netfd_t)stfd);
}int srs_usleep(srs_utime_t usecs)
{return st_usleep((st_utime_t)usecs);
}srs_netfd_t srs_netfd_open_socket(int osfd)
{return (srs_netfd_t)st_netfd_open_socket(osfd);
}srs_netfd_t srs_netfd_open(int osfd)
{return (srs_netfd_t)st_netfd_open(osfd);
}int srs_recvfrom(srs_netfd_t stfd, void *buf, int len, struct sockaddr *from, int *fromlen, srs_utime_t timeout)
{return st_recvfrom((st_netfd_t)stfd, buf, len, from, fromlen, (st_utime_t)timeout);
}int srs_sendto(srs_netfd_t stfd, void *buf, int len, const struct sockaddr * to, int tolen, srs_utime_t timeout)
{return st_sendto((st_netfd_t)stfd, buf, len, to, tolen, (st_utime_t)timeout);
}int srs_recvmsg(srs_netfd_t stfd, struct msghdr *msg, int flags, srs_utime_t timeout)
{return st_recvmsg((st_netfd_t)stfd, msg, flags, (st_utime_t)timeout);
}int srs_sendmsg(srs_netfd_t stfd, const struct msghdr *msg, int flags, srs_utime_t timeout)
{return st_sendmsg((st_netfd_t)stfd, msg, flags, (st_utime_t)timeout);
}srs_netfd_t srs_accept(srs_netfd_t stfd, struct sockaddr *addr, int *addrlen, srs_utime_t timeout)
{return (srs_netfd_t)st_accept((st_netfd_t)stfd, addr, addrlen, (st_utime_t)timeout);
}ssize_t srs_read(srs_netfd_t stfd, void *buf, size_t nbyte, srs_utime_t timeout)
{return st_read((st_netfd_t)stfd, buf, nbyte, (st_utime_t)timeout);
}bool srs_is_never_timeout(srs_utime_t tm)
{return tm == SRS_UTIME_NO_TIMEOUT;
}SrsStSocket::SrsStSocket()
{init(NULL);
}SrsStSocket::SrsStSocket(srs_netfd_t fd)
{init(fd);
}SrsStSocket::~SrsStSocket()
{
}void SrsStSocket::init(srs_netfd_t fd)
{stfd_ = fd;stm = rtm = SRS_UTIME_NO_TIMEOUT;rbytes = sbytes = 0;
}void SrsStSocket::set_recv_timeout(srs_utime_t tm)
{rtm = tm;
}srs_utime_t SrsStSocket::get_recv_timeout()
{return rtm;
}void SrsStSocket::set_send_timeout(srs_utime_t tm)
{stm = tm;
}srs_utime_t SrsStSocket::get_send_timeout()
{return stm;
}int64_t SrsStSocket::get_recv_bytes()
{return rbytes;
}int64_t SrsStSocket::get_send_bytes()
{return sbytes;
}srs_error_t SrsStSocket::read(void* buf, size_t size, ssize_t* nread)
{srs_error_t err = srs_success;srs_assert(stfd_);ssize_t nb_read;if (rtm == SRS_UTIME_NO_TIMEOUT) {nb_read = st_read((st_netfd_t)stfd_, buf, size, ST_UTIME_NO_TIMEOUT);} else {nb_read = st_read((st_netfd_t)stfd_, buf, size, rtm);}if (nread) {*nread = nb_read;}// On success a non-negative integer indicating the number of bytes actually read is returned// (a value of 0 means the network connection is closed or end of file is reached).// Otherwise, a value of -1 is returned and errno is set to indicate the error.if (nb_read <= 0) {if (nb_read < 0 && errno == ETIME) {return srs_error_new(ERROR_THREAD, "timeout %d ms", srsu2msi(rtm));}if (nb_read == 0) {errno = ECONNRESET;}return srs_error_new(ERROR_THREAD, "read");}rbytes += nb_read;return err;
}srs_error_t SrsStSocket::read_fully(void* buf, size_t size, ssize_t* nread)
{srs_error_t err = srs_success;srs_assert(stfd_);ssize_t nb_read;if (rtm == SRS_UTIME_NO_TIMEOUT) {nb_read = st_read_fully((st_netfd_t)stfd_, buf, size, ST_UTIME_NO_TIMEOUT);} else {nb_read = st_read_fully((st_netfd_t)stfd_, buf, size, rtm);}if (nread) {*nread = nb_read;}// On success a non-negative integer indicating the number of bytes actually read is returned// (a value less than nbyte means the network connection is closed or end of file is reached)// Otherwise, a value of -1 is returned and errno is set to indicate the error.if (nb_read != (ssize_t)size) {if (nb_read < 0 && errno == ETIME) {return srs_error_new(ERROR_THREAD, "timeout %d ms", srsu2msi(rtm));}if (nb_read >= 0) {errno = ECONNRESET;}return srs_error_new(ERROR_THREAD, "read fully, size=%d, nn=%d", size, nb_read);}rbytes += nb_read;return err;
}srs_error_t SrsStSocket::write(void* buf, size_t size, ssize_t* nwrite)
{srs_error_t err = srs_success;srs_assert(stfd_);ssize_t nb_write;if (stm == SRS_UTIME_NO_TIMEOUT) {nb_write = st_write((st_netfd_t)stfd_, buf, size, ST_UTIME_NO_TIMEOUT);} else {nb_write = st_write((st_netfd_t)stfd_, buf, size, stm);}if (nwrite) {*nwrite = nb_write;}// On success a non-negative integer equal to nbyte is returned.// Otherwise, a value of -1 is returned and errno is set to indicate the error.if (nb_write <= 0) {if (nb_write < 0 && errno == ETIME) {return srs_error_new(ERROR_THREAD, "write timeout %d ms", srsu2msi(stm));}return srs_error_new(ERROR_THREAD, "write");}sbytes += nb_write;return err;
}srs_error_t SrsStSocket::writev(const iovec *iov, int iov_size, ssize_t* nwrite)
{srs_error_t err = srs_success;srs_assert(stfd_);ssize_t nb_write;if (stm == SRS_UTIME_NO_TIMEOUT) {nb_write = st_writev((st_netfd_t)stfd_, iov, iov_size, ST_UTIME_NO_TIMEOUT);} else {nb_write = st_writev((st_netfd_t)stfd_, iov, iov_size, stm);}if (nwrite) {*nwrite = nb_write;}// On success a non-negative integer equal to nbyte is returned.// Otherwise, a value of -1 is returned and errno is set to indicate the error.if (nb_write <= 0) {if (nb_write < 0 && errno == ETIME) {return srs_error_new(ERROR_THREAD, "writev timeout %d ms", srsu2msi(stm));}return srs_error_new(ERROR_THREAD, "writev");}sbytes += nb_write;return err;
}SrsTcpClient::SrsTcpClient(string h, int p, srs_utime_t tm)
{stfd_ = NULL;io = new SrsStSocket();host = h;port = p;timeout = tm;
}SrsTcpClient::~SrsTcpClient()
{srs_freep(io);srs_close_stfd(stfd_);
}srs_error_t SrsTcpClient::connect()
{srs_error_t err = srs_success;srs_netfd_t stfd = NULL;if ((err = srs_tcp_connect(host, port, timeout, &stfd)) != srs_success) {return srs_error_wrap(err, "tcp: connect %s:%d to=%dms", host.c_str(), port, srsu2msi(timeout));}// TODO: FIMXE: The timeout set on io need to be set to new object.srs_freep(io);io = new SrsStSocket(stfd);srs_close_stfd(stfd_);stfd_ = stfd;return err;
}void SrsTcpClient::set_recv_timeout(srs_utime_t tm)
{io->set_recv_timeout(tm);
}srs_utime_t SrsTcpClient::get_recv_timeout()
{return io->get_recv_timeout();
}void SrsTcpClient::set_send_timeout(srs_utime_t tm)
{io->set_send_timeout(tm);
}srs_utime_t SrsTcpClient::get_send_timeout()
{return io->get_send_timeout();
}int64_t SrsTcpClient::get_recv_bytes()
{return io->get_recv_bytes();
}int64_t SrsTcpClient::get_send_bytes()
{return io->get_send_bytes();
}srs_error_t SrsTcpClient::read(void* buf, size_t size, ssize_t* nread)
{return io->read(buf, size, nread);
}srs_error_t SrsTcpClient::read_fully(void* buf, size_t size, ssize_t* nread)
{return io->read_fully(buf, size, nread);
}srs_error_t SrsTcpClient::write(void* buf, size_t size, ssize_t* nwrite)
{return io->write(buf, size, nwrite);
}srs_error_t SrsTcpClient::writev(const iovec *iov, int iov_size, ssize_t* nwrite)
{return io->writev(iov, iov_size, nwrite);
}ST协程库测试
#include "srs_app_st.hpp"
#include <st.h>//0.在ST_TEST对象里启动一个协程
class ST_TEST : public ISrsCoroutineHandler{
public:ST_TEST(){trd = NULL;srs_freep(trd);trd = new SrsSTCoroutine("ST_TEST-", this,"9527ID");//2.new一个ST对象}srs_error_t startST(){srs_error_t err = srs_success;if ((err = trd->start()) != srs_success) {//3.start()创建协程return srs_error_wrap(err, "start timer");}printf("\nST.startST\n");return err;}
public: virtual srs_error_t cycle() {//4.协程处理函数,回调cycle()srs_error_t err = srs_success;printf("ST.cycle\n");return err;}
private:SrsCoroutine* trd;
};srs_st_init();//1.初始化STST_TEST *pST_TEST = new ST_TEST;pST_TEST->startST();st_thread_exit(NULL);
打印
st_init success, use epoll
ST.startST
ST.cycle
SrsAutoFree测试
class SrsAutoFree_TEST{
public:SrsAutoFree_TEST(){printf("SrsAutoFree_TEST\n");}~SrsAutoFree_TEST(){printf("~SrsAutoFree_TEST\n");}
};void testAutoFree()
{SrsAutoFree_TEST *pSrsAutoFree_TEST = nullptr;pSrsAutoFree_TEST = new SrsAutoFree_TEST;SrsAutoFree(SrsAutoFree_TEST,pSrsAutoFree_TEST);
}testAutoFree();
打印
SrsAutoFree_TEST
~SrsAutoFree_TEST
相关文章:

SRS开源代码框架,协程库state-threads的使用
本章内容解读SRS开源代码框架,无二次开发,以学习交流为目的。 SRS是国人开发的流媒体服务器,C语言开发,本章使用版本:https://github.com/ossrs/srs/tree/5.0release。 目录 SRS协程库ST的使用源码ST协程库测试SrsAut…...
【QT 网络云盘客户端】——登录界面功能的实现
目录 1.注册账号 2.服务器ip地址和端口号设置 3. 登录功能 4.读取配置文件 5.显示主界面 1.注册账号 1.点击注册页面,将数据 输入 到 用户名,昵称,密码,确认密码,手机,邮箱 的输入框中, 点…...
【复盘与分享】第十一届泰迪杯B题:产品订单的数据分析与需求预测
文章目录 题目第一问第二问2.1 数据预处理2.2 数据集分析2.2.1 训练集2.2.2 预测集 2.3 特征工程2.4 模型建立2.4.1 模型框架和评价指标2.4.2 模型建立2.4.3 误差分析和特征筛选2.4.4 新品模型 2.5 模型融合2.6 预测方法2.7 总结 结尾 距离比赛结束已经过去两个多月了。 整个过…...
X - Transformer
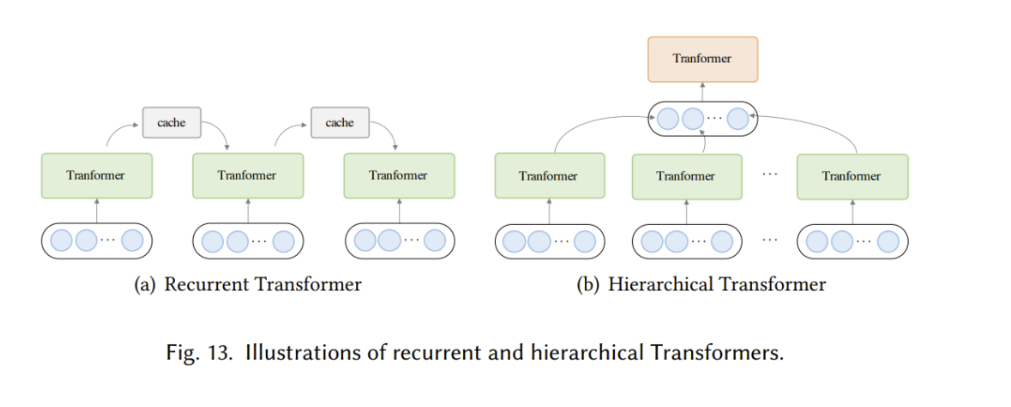
回顾 Transformer 的发展 Transformer 最初是作为机器翻译的序列到序列模型提出的,而后来的研究表明,基于 Transformer 的预训练模型(PTM) 在各项任务中都有最优的表现。因此,Transformer 已成为 NLP 领域的首选架构&…...
ubuntu下畅玩Seer(via wine)
第一步:安装wine 部分exe文件的运行需要32位的指令集架构,需要向Ubuntu系统中添加一个新的架构(i386),以支持32位的软件包。因为在64位的Ubuntu系统中,默认情况下只能安装和运行64位的软件。 通过添加i386…...

第五章:Spring下
第五章:Spring下 5.1:AOP 场景模拟 创建一个新的模块,spring_proxy_10,并引入下面的jar包。 <packaging>jar</packaging><dependencies><dependency><groupId>junit</groupId><artifactI…...
)
在CSDN学Golang云原生(Kubernetes基础)
一,k8s集群安装和升级 安装 Golang K8s 集群可以参照以下步骤: 准备环境:需要一组 Linux 服务器,并在每台服务器上安装 Docker 和 Kubernetes 工具。初始化集群:使用 kubeadm 工具初始化一个 Kubernetes 集群。例如&…...
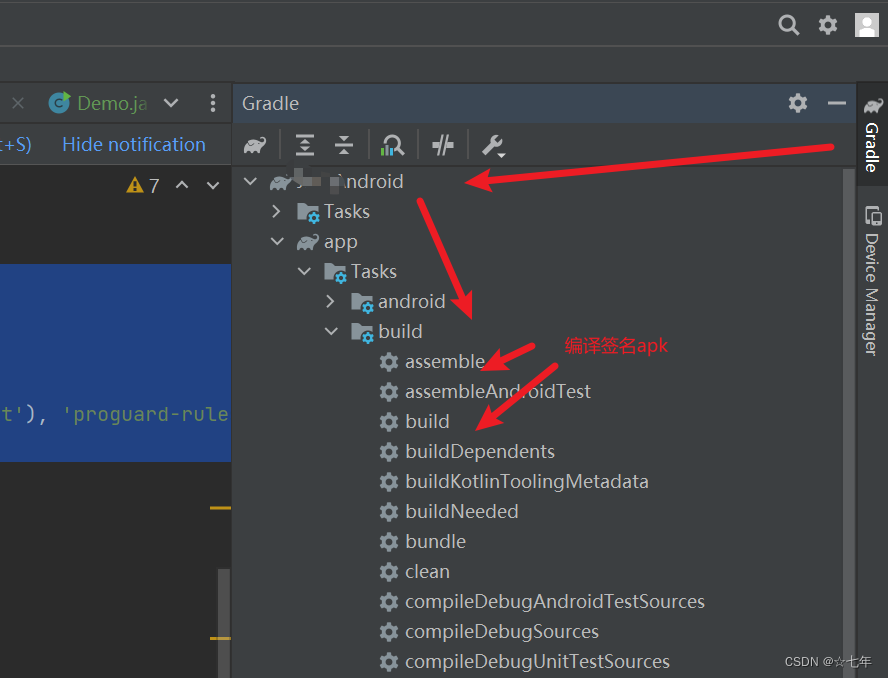
给APK签名—两种方式(flutter android 安装包)
前提:给未签名的apk签名,可以先检查下apk有没有签名 通过命令行查看:打开终端或命令行界面,导入包含APK文件的目录,并执行以下命令: keytool -printcert -jarfile your_app.apk 将 your_app.apk替换为要检查…...
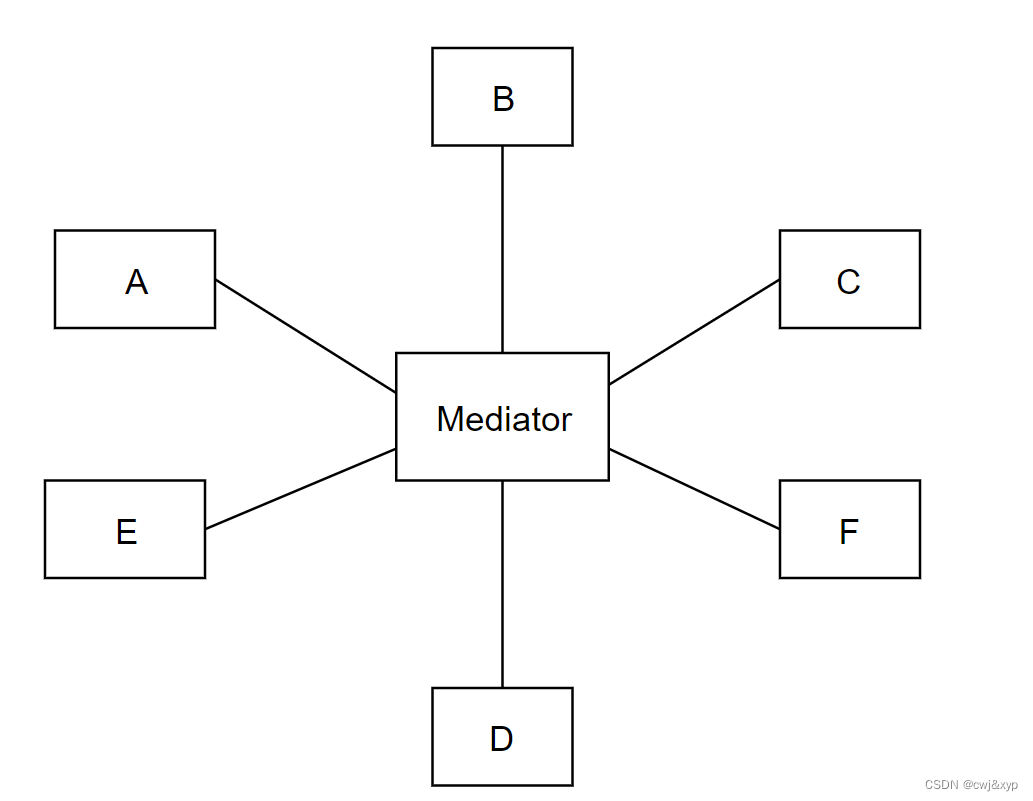
观察者模式、中介者模式和发布订阅模式
观察者模式 定义 观察者模式定义了对象间的一种一对多的依赖关系,当一个对象的状态发生改变时,所有依赖于它的对象都将得到通知,并自动更新 观察者模式属于行为型模式,行为型模式关注的是对象之间的通讯,观察者模式…...

PHP-Mysql图书管理系统--【白嫖项目】
强撸项目系列总目录在000集 PHP要怎么学–【思维导图知识范围】 文章目录 本系列校训本项目使用技术 首页phpStudy 设置导数据库后台的管理界面数据库表结构项目目录如图:代码部分:主页的head 配套资源作业: 本系列校训 用免费公开视频&am…...
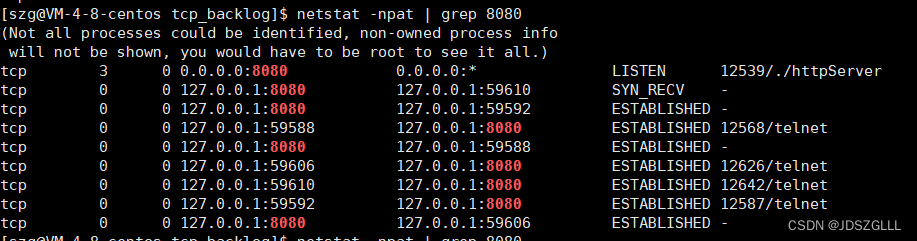
网络传输层协议:UDP和TCP
背景知识 再谈端口号 端口号(Port)标识了一个主机上进行通信的不同的应用程序; 在TCP/IP协议中, 用 "源IP", "源端口号", "目的IP", "目的端口号", "协议号" 这样一个五元组来标识一个通信(可以通过 netstat -…...

ElementUI Select选择器如何根据value值显示对应的label
修改前效果如图所示,数据值状态应显示为可用,但实际上仅显示了状态码1,并没有显示其对应的状态信息。在排查了数据类型对应关系问题后,并没有产生实质性影响,只好对代码进行了如下修改。 修改前代码: <…...

Kotlin 内联函数语法之let、apply、also、run、with的用法与详解
一、介绍 kotlin的语法千奇百怪,今天我们将介绍项目中频率使用比较高的几个内联函数。 二、什么叫内联函数? 内联函数 的语义很简单:把函数体复制粘贴到函数调用处 。使用起来也毫无困难,用 inline关键字修饰函数即可。 语法&a…...

Swift 中如何判断是push 过来的页面 还是present过来的 页面
在 Swift 中,可以通过检查当前视图控制器的 presentingViewController 属性来判断是通过 push 过来的页面还是 present 过来的页面。 下面是一个示例代码,展示如何判断是通过 push 还是 present 过来的页面: if let presentingViewControll…...
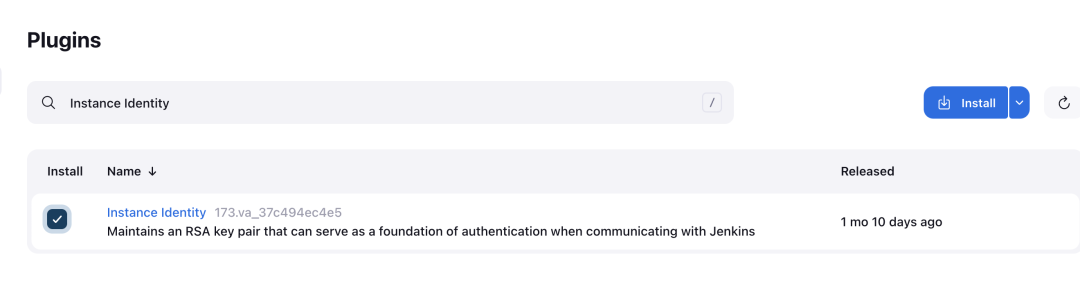
基于K8s环境·使用ArgoCD部署Jenkins和静态Agent节点
今天是「DevOps云学堂」与你共同进步的第 47天 第⑦期DevOps实战训练营 7月15日已开营 实践环境升级基于K8s和ArgoCD 本文节选自第⑦期DevOps训练营 , 对于训练营的同学实践此文档依赖于基础环境配置文档, 运行K8s集群并配置NFS存储。实际上只要有个K8s集…...

874. 模拟行走机器人
874. 模拟行走机器人 机器人在一个无限大小的 XY 网格平面上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令 commands : -2 :向左转 90 度-1 :向右转 90 度1 < x < 9 :…...

【Linux】- RPM 与 YUM
RPM 与 YUM 1.1 rpm 包的管理1.2 rpm 包的简单查询指令1.3 rpm 包的其它查询指令:1.4 卸载 rpm 包:2.1 安装 rpm 包3.1 yum3.2 yum 的基本指令3.3 安装指定的 yum 包3.4 yum 应用实例: 1.1 rpm 包的管理 介绍 rpm 用于互联网下载包的打包及安…...

Visual Studio 2015编译器 自动生成 XXX_EXPORTS宏
XXX_EXPORTS宏 XXX_EXPORTS宏是由Visual Studio 2015编译器自动生成的。这个宏用于标识当前项目是一个导出符号的动态链接库(DLL)项目。在使用Visual Studio 2015创建Win32项目时,编译器会自动添加这个宏到项目的预定义宏中。 这个宏的作用…...

HTML5的应用现状与发展前景
HTML5,作为Web技术的核心,已经深深地改变了我们看待和使用Web的方式。它不仅提供了数不尽的新特性和功能,还使得Web设计和开发更加互动、更加直观。这篇文章将探讨HTML5的当前应用现状,以及它的未来发展前景。 HTML5的应用现状 H…...
day44-Spring_AOP
0目录 1.2.3 1.Spring_AOP 实体类: Mapper接口: Service和实现类: 测试1: 运行后: 测试2:无此型号时 测试3:库存不足时 解决方案1:事务声明管理器 测试:…...

LLM API安全攻防实战:从提示词注入到自动化测试方案
1. 项目概述:被忽视的LLM API安全前线最近在帮几个团队做上线前的安全审计,发现一个挺有意思的现象:大家对于传统API的鉴权、限流、SQL注入这些常规检查已经形成了肌肉记忆,但一旦涉及到LLM(大语言模型)的A…...
)
Goframe项目实战:从数据库表到API接口的全链路开发指南(含避坑点)
Goframe项目实战:从数据库表到API接口的全链路开发指南(含避坑点)在当今微服务架构盛行的时代,Go语言因其高性能和并发优势成为后端开发的热门选择。而Goframe作为一款企业级的Go应用开发框架,提供了从数据库操作到API…...

癫痫手术精准定位:基于脑电信号昼夜节律与多生物标志物的机器学习分析框架
1. 项目概述:当机器学习遇见脑电信号,如何让癫痫手术更精准?作为一名长期耕耘在生物医学信号处理与机器学习交叉领域的工程师,我常常思考如何将算法模型从实验室的“玩具”变成临床医生手中可靠的“手术刀”。癫痫,这个…...

自制BLE112串口编程器:基于Bootloader的免调试器烧录方案
1. 项目概述:为BLE112模块打造一款免调试器的RS232编程器在嵌入式开发,特别是早期的蓝牙低功耗(BLE)模块应用中,我们常常会遇到一个棘手的问题:官方开发工具链的依赖和限制。以Silicon Labs(当时…...

Agent开发面试通关攻略:吃透稳拿offer
阅读前置:2026年当下最卷也最缺人的AI岗位,一定是AI Agent开发。最近刷遍CSDN、牛客、力扣最新面经,发现一个非常明显的招聘趋势:普通大模型微调岗位饱和内卷,而AI Agent开发岗位人才严重缺口,薪资更高、竞…...

echarts中heatmap鼠标滚动禁用缩放,向下滚动
配置如下效果如下...

对比 Token Plan 与按量计费在 Taotoken 平台上的成本体感差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比 Token Plan 与按量计费在 Taotoken 平台上的成本体感差异 对于个人开发者或项目管理者而言,在接入大模型服务时&a…...
)
Windows10下V-REP教育版安装保姆级教程(附百度网盘资源与避坑点)
Windows10系统V-REP教育版完整安装指南:从下载到实战避坑在机器人仿真和自动化控制领域,V-REP(现更名为CoppeliaSim)作为一款功能强大的跨平台机器人仿真软件,已经成为众多工科学生和研究人员的首选工具。特别是其教育…...
)
毕业设计 yolov11骨折检测医疗辅助系统(源码+论文)
文章目录 0 前言1 项目运行效果2 课题背景2.1 研究背景2.2 国内外研究现状2.3 研究意义 3 设计框架(骨折检测系统设计框架说明)3.1. 系统架构图3.2. 技术选型3.2.1 核心组件3.2.2 辅助工具 3.3. 核心模块设计3.3.1 YOLO模型训练模块训练流程图关键伪代码…...

转行网络安全运维:从0到1的可落地指南
转行网络安全运维:从0到1的可落地指南 一、 「3个核心技能:从零起步也能会」 网上学习资料多到爆炸,不用纠结“哪个最好”,记住一句话:**能学会、能上手的就是好的**!不管是免费视频还是付费课,…...