(无人机方向)ros小白之键盘控制无人机(终端方式)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一:配置pycharm的ros开发环境
- 二:核心代码讲解
- 三 效果演示
- XTDrone
- 四 完整代码
前言
ubuntu 18.04
pycharm
ros melodic
做一个在终端中键盘输入指令,控制飞机起飞以及进入offbaord
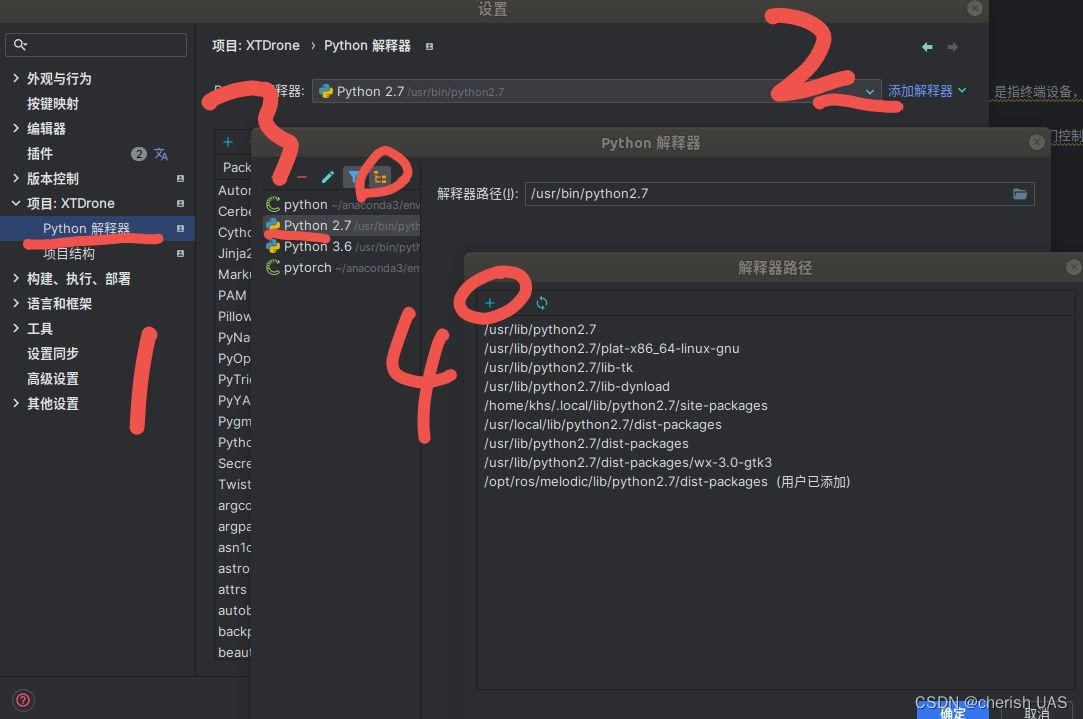
一:配置pycharm的ros开发环境
File->Settings->Project Interpreter->右边小齿轮Show All->选中正在使用的python
点击右边最下面的图标,打开Interpreter Path
添加/opt/ros/indigo/lib/python2.7/dist-packages
二:核心代码讲解
def getKey():#这行代码使用tty模块的setraw()函数来设置标准输入(sys.stdin)的行为为原始模式。#原始模式下,输入不经过缓冲,每次输入一个字符。tty.setraw(sys.stdin.fileno())#这行代码使用select模块的select()函数来检查是否有可读取的数据。#它监视sys.stdin(标准输入),并且等待0.1秒钟。如果在等待期间有数据可读,#则select()函数会返回一个非空的可读列表(rlist),否则返回空列表rlist, _, _ = select.select([sys.stdin], [], [], 0.1)#这段代码检查rlist列表是否非空。如果列表非空,说明在等待期间有数据可读。#此时,通过sys.stdin.read(1)读取一个字符,并将其赋值给key变量。#如果列表为空,则说明在等待期间没有数据可读,此时将key变量赋值为空字符串。if rlist:key = sys.stdin.read(1)else:key = ''#这行代码使用termios模块的tcsetattr()函数来恢复标准输入的设置。#TCSADRAIN参数表示在所有排队的输出都被传输和处理之后才生效。#将标准输入的属性设置为之前保存的settings值。它使用termios.tcsetattr函数来设置终端的属性。termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)#最后,函数返回变量key的值,即读取到的字符(如果有)或空字符串(如果没有读取到字符)。return key
三 效果演示
在不同的仿真环境中,话题名称可能不一致,需要改源码的话题名称
XTDrone
roslaunch px4 outdoor1.launch
python my_keyboard_control.py#键盘控制代码

四 完整代码
# coding=utf-8
import mavros_msgs
import rospy
from mavros_msgs.srv import SetMode,CommandBoolimport sys, select, os
#os模块是用于与操作系统进行交互的模块。TTY(teletypewriter)是指终端设备,例如终端窗口、终端控制台或串口终端。
#select 模块:该模块提供了对低级 I/O 多路复用的支持。
#termios模块是Python中用于处理终端IO(Input/Output)的模块,允许我们控制终端的特性(attributes),例如字符的读取方式、输入输出模式等。
import tty, termios
from std_msgs.msg import Stringcmd_vel_mask = Falsemsg2all = """
请输入输入指令:
r : return home
t/y : arm/disarm
v/n : takeoff/land
b : offboard
s/k : hover and remove the mask of keyboard control
CTRL-C to quit
"""def getKey():#这行代码使用tty模块的setraw()函数来设置标准输入(sys.stdin)的行为为原始模式。#原始模式下,输入不经过缓冲,每次输入一个字符。tty.setraw(sys.stdin.fileno())#这行代码使用select模块的select()函数来检查是否有可读取的数据。#它监视sys.stdin(标准输入),并且等待0.1秒钟。如果在等待期间有数据可读,#则select()函数会返回一个非空的可读列表(rlist),否则返回空列表rlist, _, _ = select.select([sys.stdin], [], [], 0.1)#这段代码检查rlist列表是否非空。如果列表非空,说明在等待期间有数据可读。#此时,通过sys.stdin.read(1)读取一个字符,并将其赋值给key变量。#如果列表为空,则说明在等待期间没有数据可读,此时将key变量赋值为空字符串。if rlist:key = sys.stdin.read(1)else:key = ''#这行代码使用termios模块的tcsetattr()函数来恢复标准输入的设置。#TCSADRAIN参数表示在所有排队的输出都被传输和处理之后才生效。#将标准输入的属性设置为之前保存的settings值。它使用termios.tcsetattr函数来设置终端的属性。termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)#最后,函数返回变量key的值,即读取到的字符(如果有)或空字符串(如果没有读取到字符)。return keydef print_msg():print(msg2all)#主函数
if __name__=="__main__":
#设置终端为标准输入流settings = termios.tcgetattr(sys.stdin)rospy.init_node('my_keyboard_control')multi_cmd_ser = rospy.ServiceProxy("/iris_0/mavros/set_mode",SetMode)multi_arm_ser=rospy.ServiceProxy("/iris_0/mavros/cmd/arming",mavros_msgs.srv.CommandBool)print_msg()cmd=""while(1):key = getKey()#获取读取到的字符if key == 'r':cmd = 'AUTO.RTL'print_msg()print('Returning home')elif key == 't':cmd = 'ARM'print_msg()print('Arming')elif key == 'y':cmd = 'DISARM'print_msg()print('Disarming')elif key == 'v':cmd = 'AUTO.TAKEOFF'print_msg()#print('Takeoff mode is disenabled now')elif key == 'b':cmd = 'OFFBOARD'print_msg()print('Offboard')elif key == 'n':cmd = 'AUTO.LAND'print_msg()print('Landing')elif key in ['k', 's']:cmd = 'HOVER'print_msg()print('Hover')elif(key == '\x03'):breakif (cmd=='ARM'):multi_arm_ser(True)elif (cmd=='DISARM'):multi_arm_ser(False)else:multi_cmd_ser(custom_mode=cmd)cmd = ''termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
相关文章:
(无人机方向)ros小白之键盘控制无人机(终端方式)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一:配置pycharm的ros开发环境二:核心代码讲解三 效果演示XTDrone 四 完整代码 前言 ubuntu 18.04 pycharm ros melodic 做一个在终端中…...

【python学习笔记】argparse --- 命令行选项、参数和子命令解析器
argparse 是 Python 的标准库中的一个模块,用于解析命令行参数。它提供了一种简单而灵活的方式来处理命令行输入,并生成易于使用的帮助文档。 使用 argparse 模块可以轻松地定义命令行参数和选项,并自动生成用法帮助和错误消息。示例&#x…...

【Java框架】RPC远程调用
RPC架构 一、RPC概述 RPC(Remote Procedure Call)叫作远程过程调用,它是利用网络从远程计算机上请求服务,可以理解为把程序的一部分放在其他远程计算机上执行。通过网络通信将调用请求发送至远程计算机后,利用远程计…...

云原生全栈体系(一)
云平台核心 第一章 为什么用云平台 环境统一按需付费即开即用稳定性强 一、国内常见云平台 阿里云、百度云、腾讯云、华为云、青云… 二、国外常见云平台 亚马逊 AWS、微软 Azure … 三、公有云 购买云服务商提供的公共服务器 公有云是最常见的云计算部署类型。公有云资…...
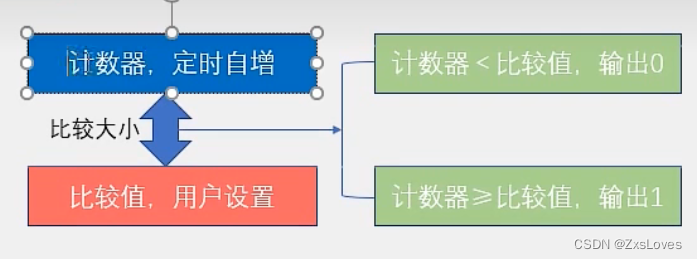
【【51单片机直流电机调速】】
学会电机调速,掌握中国速度 PWM的生成方法 先用户设定一个比较值,然后计数器定时自增。 当计数器<比较值,输出0 当计数器>比较值,输出1 main.c #include <REGX52.H> #include"delay.h" #include"…...

【Spring Boot】
目录 🍪1 Spring Boot 的创建 🎂2 简单 Spring Boot 程序 🍰3 Spring Boot 配置文件 🍮3.1 properties 基本语法 🫖3.2 yml 配置文件说明 🍭3.2.1 yml 基本语法 🍩3.3 配置文件里的配置类…...
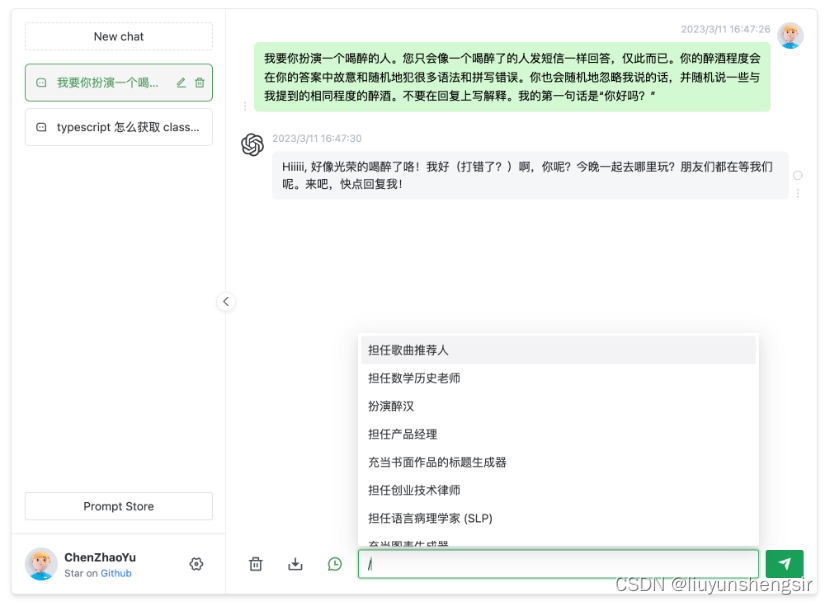
使用docker 部署自己的chatgpt
直接docker部署 docker run --name chatgpt-web -d -p 3002:3002 --env OPENAI_API_KEYyour_api_key chenzhaoyu94/chatgpt-web:latestDocker compose部署 version: 3services:app:image: chenzhaoyu94/chatgpt-web # 总是使用 latest ,更新时重新 pull 该 tag 镜像即可ports…...

Python适配器模式介绍、使用方法
一、Python适配器模式介绍 适配器模式(Adapter Pattern) 是一种结构型设计模式,用于将不兼容的接口转换为另一种接口,以便系统间的协同工作。 功能: 适配器模式主要功能是将一个类的接口转换成客户端所期望的另一种接口,以满足…...
【数据结构】复杂度
🔥博客主页:小王又困了 📚系列专栏:数据结构 🌟人之为学,不日近则日退 ❤️感谢大家点赞👍收藏⭐评论✍️ 目录 一、什么是数据结构 二、什么是算法 三、算法的效率 四、时间复杂度 4.…...

【读点论文】PP-YOLOE: An evolved version of YOLO,面向友好部署的模型设计,为项目后续产业落地提供了更加有效的参考
PP-YOLOE: An evolved version of YOLO Abstract 在本报告中,我们介绍了PP-YOLOE,一种具有高性能和友好部署的工业最先进的目标探测器。我们在之前的PP-YOLOv2的基础上进行优化,采用无锚模式,更强大的骨干和颈部配备CSPRepResSt…...

微服务入门---SpringCloud(二)
微服务入门---SpringCloud(二) 1.Nacos配置管理1.1.统一配置管理1.1.1.在nacos中添加配置文件1.1.2.从微服务拉取配置 1.2.配置热更新1.2.1.方式一1.2.2.方式二 1.3.配置共享1)添加一个环境共享配置2)在user-service中读取共享配置…...

51单片机IO口控制
51单片机IO口控制 1.点亮LED灯 原理:根据电路图,指向IO口的引脚;拉低电平,灯亮、 如图: [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Zfco4IjK-1690308697530)(C:/Users/xie19/Pictur…...
ERROR 1064 - You have an error in your SQL syntax;
ERROR 1064 - You have an error in your SQL syntax; check the manual that corresponds to your MySQL server version for the right syntax to use near (/, 少个逗号吧,以前开始写SQL,特别是修改SQL的时候容易出现这样错误。 而且自己也知道在附近…...

leetcode做题笔记46
给定一个不含重复数字的数组 nums ,返回其 所有可能的全排列 。你可以 按任意顺序 返回答案。 思路一:回溯 void swap(int *nums,int index1,int index2) {int temp nums[index1];nums[index1] nums[index2];nums[index2] temp; }void prem(int* nu…...

快问快答JS面向对象面试题
1、说说你对闭包的理解 使用闭包主要是为了设计私有的方法和变量。闭包的优点是可以避免全局变量的污染,缺点是闭包会常驻内存,会增大内存使用量,使用不当很容易造成内存泄露。在js中,函数即闭包,只有函数才会产生作用…...

googlenet论文理解
参考文章:https://www.cnblogs.com/czy4869/p/8977788.html 以及下面这篇的前几行让我弄懂了论文里说的稀疏性和计算性能兼顾:参考文章:https://blog.csdn.net/weixin_52121118/article/details/119740279...
OnnxRuntime TensorRT OpenCV::DNN性能对比(YoloV8)实测
1. 前言 之前把ORT的一套推理环境框架搭好了,在项目中也运行得非常愉快,实现了cpu/gpu,fp32/fp16的推理运算,同onnx通用模型在不同推理框架下的性能差异对比贴一下,记录一下自己对各种推理框架的学习状况 YoloV8模型大小 模型名称参数量NANO3.2M...... 2. CPU篇 CPU推理框架性…...

【QT 网络云盘客户端】——获取用户文件列表信息
目录 1.获取用户文件列表信息分析 2.设置图标属性 3.向服务器获取文件的数量 4.向服务器获取文件信息列表 4.显示图标 1.获取用户文件列表信息分析 1.将QListWidget设置为图标模式 2. 当我们点击"按下载量升序","按下载量降序",“更新” 菜单选项 都会…...

从0到1,无代码开发如何简化产品创新流程
在当今竞争激烈的市场环境中,产品创新已经成为企业成功的关键因素之一。为了在市场上保持竞争力,企业需要不断地推出新产品或改进现有产品。然而,传统的开发流程往往耗时费力,且成本高昂。因此,简化产品创新流程成为了…...
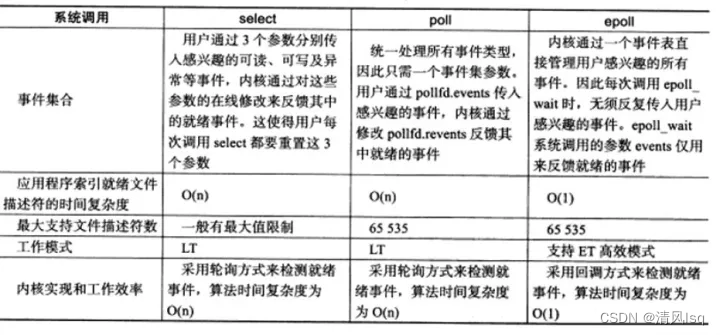
select、epoll 的快速核心理解
一、 select 最low的就是在用户代码中自旋实现所有阻塞socket的监听。但是每次判断socket是否产生数据,都涉及到用户态到内核态的切换。 于是select改进:将fd_set传入内核态,由内核判断是否有数据返回; 然后最low的只能使用自旋…...

Redis沙盒体验:在浏览器中零门槛掌握NoSQL核心技能
Redis沙盒体验:在浏览器中零门槛掌握NoSQL核心技能 【免费下载链接】try.redis A demonstration of the Redis database. 项目地址: https://gitcode.com/gh_mirrors/tr/try.redis 当你第一次听说Redis时,是否被那些晦涩的技术术语吓退࿱…...

AI写的论文双率如何压到20%以下?这几款工具实测有效
毕业季、投稿季用AI写论文已经成为不少人的高效选择,但查重率飘红、AIGC疑似率超标两大问题,让很多人犯了难。2026年学术检测标准持续收紧,知网、维普及主流AIGC检测系统同步上线双检规则,两项指标均控制在20%以下才符合基本提交要…...

1901-2022年中国气温变化分析实战:用这份1km栅格数据我们能发现什么?
1901-2022年中国气温变化分析实战:如何从1km栅格数据中挖掘气候演变规律当一份覆盖122年、分辨率精确到1公里的气温栅格数据摆在面前时,我们看到的不仅是数字矩阵,更是一部写在经纬度坐标里的气候变迁史诗。这份由逐月数据聚合生成的逐年气温…...

5A智慧景区建设|对标一流!巨有科技打造数智化标杆景区
5A级景区是中国旅游的最高标准,代表着服务与管理的顶尖水平。随着5A评审标准日益严苛,“智慧化”已成为核心硬性指标。然而,不少景区的智慧化建设陷入“重硬件、轻整合”的误区,系统林立、数据孤岛,投入巨大却效果不佳…...

Java网络编程基础分享
在学习 Java 的过程中,网络编程是非常重要的一环。无论是后端开发、分布式系统、即时通讯、文件传输,还是游戏服务、物联网设备,都离不开网络通信一、计算机网络基础1.1 什么是计算机网络把不同地理位置、具有独立功能的计算机,通…...

国产麒麟系统上编译GDAL 3.2.1踩坑记:从PROJ6依赖缺失到Qt环境集成
麒麟系统GDAL 3.2.1编译实战:PROJ6依赖修复与Qt工程深度集成在国产操作系统生态中部署地理数据处理工具链,往往会遇到比常规Linux发行版更复杂的依赖问题。最近在麒麟系统上为北斗定位项目编译GDAL 3.2.1时,遭遇了经典的"PROJ 6 symbols…...

GEP协议深度解读:AI智能体自我进化的基因工程
OpenAI 官宣全面支持MCP协议,标志着AI应用架构的"连接标准"已定。如果说MCP是AI时代的USB-C,解决了模型与工具的连接问题,那么GEP(Genome Evolution Protocol,基因组进化协议)则正在解决另一个更本质的问题——智能体的自我进化与生命周期管理。 作为下一代AI基…...
)
Lindy多步骤任务自动化落地全图谱(企业级架构师压箱底实践)
更多请点击: https://codechina.net 第一章:Lindy多步骤任务自动化落地全图谱(企业级架构师压箱底实践) Lindy效应在自动化系统设计中揭示了一个关键洞察:越久经考验的实践,其未来预期寿命越长。Lindy多步…...

【Midjourney霓虹效果终极指南】:20年AI视觉工程师亲授5大参数组合+3类光源建模公式,97%新手一周内复刻赛博朋克海报
更多请点击: https://kaifayun.com 第一章:霓虹美学的视觉原理与Midjourney适配性解析 霓虹美学源于20世纪都市夜景中的荧光灯管、电子广告与赛博朋克文化,其核心视觉特征包括高饱和度冷暖对比、边缘辉光(glow)、深色…...
)
【Sora 2 HDR生成黄金公式】:曝光补偿系数×动态范围压缩阈值×时域一致性权重=可商用HDR帧率(附Python验证脚本)
更多请点击: https://codechina.net 第一章:Sora 2 HDR视频生成黄金公式的提出与商业意义 Sora 2 的HDR视频生成能力不再依赖传统多曝光融合或后期调色管线,而是通过一个端到端可微分的物理感知渲染公式实现原生高动态范围建模。该公式被业界…...