16.1.STM32F407ZGT6-CAN基础概念
参考:
https://blog.csdn.net/sunlight_vip/article/details/128639144
前言:
学习总结CAN的知识点:
1.can是什么,历史由来和背景
2.can的物理层,链路层
3.初始化的流程和关键点
4.波特率怎么设置
5.can id怎么过滤
6.can的发送和接收原理
7.can的发送和接收API
1. CAN协议概念
1.1 CAN 协议简介
CAN 是控制器局域网络 (Controller Area Network) 的简称,它是由研发和生产汽车电子产品著称的德国 BOSCH 公司开发的,并最终成为国际标准(ISO11519以及ISO11898),是国际上应用最广泛的现场总线之一。差异点如下:

CAN 总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN 为底层协议专为大型货车和重工机械车辆设计的 J1939 协议。近年来,它具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强及振动大的工业环境。
我们来贴图一个车载网络构想图

1.2 CAN 物理层
与 I2C、SPI 等具有时钟信号的同步通讯方式不同,CAN 通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有 CAN_High 和 CAN_Low 两条信号线,共同构成一组差分信号线,以差分信号的形式进行通讯。我们来看一个示意图

1.2.1 闭环总线网络
CAN 物理层的形式主要有两种,图中的 CAN 通讯网络是一种遵循 ISO11898 标准的高速、短距离“闭环网络”,它的总线最大长度为 40m,通信速度最高为 1Mbps,总线的两端各要求有一个“120 欧”的电阻。

1.2.2 开环总线网络
图中的是遵循 ISO11519-2 标准的低速、远距离“开环网络”,它的最大传输距离为 1km,最高通讯速率为 125kbps,两根总线是独立的、不形成闭环,要求每根总线上各串联有一个“2.2千欧”的电阻。

1.2.3 通讯节点
从 CAN 通讯网络图可了解到,CAN 总线上可以挂载多个通讯节点,节点之间的信号经过总线传输,实现节点间通讯。由于 CAN 通讯协议不对节点进行地址编码,而是对数据内容进行编码的,所以网络中的节点个数理论上不受限制,只要总线的负载足够即可,可以通过中继器增强负载。
CAN 通讯节点由一个 CAN 控制器及 CAN 收发器组成,控制器与收发器之间通过 CAN_Tx 及CAN_Rx 信号线相连,收发器与 CAN 总线之间使用 CAN_High 及 CAN_Low 信号线相连。其中CAN_Tx 及 CAN_Rx 使用普通的类似 TTL 逻辑信号,而 CAN_High 及 CAN_Low 是一对差分信号线,使用比较特别的差分信号,下一小节再详细说明。
当 CAN 节点需要发送数据时,控制器把要发送的二进制编码通过 CAN_Tx 线发送到收发器,然后由收发器把这个普通的逻辑电平信号转化成差分信号,通过差分线 CAN_High 和 CAN_Low 线输出到 CAN 总线网络。而通过收发器接收总线上的数据到控制器时,则是相反的过程,收发器把总线上收到的 CAN_High 及 CAN_Low 信号转化成普通的逻辑电平信号,通过 CAN_Rx 输出到控制器中。
例如,STM32 的 CAN 片上外设就是通讯节点中的控制器,为了构成完整的节点,还要给它外接一个收发器,在我们实验板中使用型号为 TJA1050 的芯片作为 CAN 收发器。CAN 控制器与 CAN收发器的关系如同 TTL 串口与 MAX3232 电平转换芯片的关系, MAX3232 芯片把 TTL 电平的串口信号转换成 RS-232 电平的串口信号,CAN 收发器的作用则是把 CAN 控制器的 TTL 电平信号转换成差分信号 (或者相反) 。
目前有以下CAN电平转换芯片(不全)

我们来用TJA1050来看下原理图:

1.2.4 差分信号
差分信号又称差模信号,与传统使用单根信号线电压表示逻辑的方式有区别,使用差分信号传输时,需要两根信号线,这两个信号线的振幅相等,相位相反,通过两根信号线的电压差值来表示逻辑 0 和逻辑 1。见图,它使用了 V+ 与 V-信号的差值表达出了图下方的信号。
相对于单信号线传输的方式,使用差分信号传输具有如下优点:

• 抗干扰能力强,当外界存在噪声干扰时,几乎会同时耦合到两条信号线上,而接收端只关心两个信号的差值,所以外界的共模噪声可以被完全抵消。
举一个例子,正常的单线假设逻辑1是3.3V,逻辑0假设是0V,但是如果有噪声,把3.3V弄成了0V(极端),把0V弄成了-3.3V,此时就逻辑错误,但是有Can高/Can低一般都作用于两根线,所以两个虽然都有噪声影响,但是差值还是不变的
• 能有效抑制它对外部的电磁干扰,同样的道理,由于两根信号的极性相反,他们对外辐射的电磁场可以相互抵消,耦合的越紧密,泄放到外界的电磁能量越少。
举一个例子,假设一根是10V,一根是-10V,单跟都会对外部造成电磁干扰,但是CAN可以把线拧在一起,跟编麻花一样,可以互相抵消电子干扰
• 时序定位精确,由于差分信号的开关变化是位于两个信号的交点,而不像普通单端信号依靠高低两个阈值电压判断,因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路。
由于差分信号线具有这些优点,所以在 USB 协议、485 协议、以太网协议及 CAN 协议的物理层中,都使用了差分信号传输。
1.2.5 CAN 协议中的差分信号
CAN 协议中对它使用的 CAN_High 及 CAN_Low 表示的差分信号做了规定,见表及图。以高速 CAN 协议为例,当表示逻辑 1 时 (隐性电平) ,CAN_High 和 CAN_Low 线上的电压均为 2.5v,即它们的电压差 VH-V:sub:L=0V;而表示逻辑 0 时 (显性电平) ,CAN_High 的电平为 3.5V,CAN_Low 线的电平为 1.5V,即它们的电压差为 VH-V:sub:L=2V。例如,当 CAN收发器从 CAN_Tx 线接收到来自 CAN 控制器的低电平信号时 (逻辑 0),它会使 CAN_High 输出3.5V,同时 CAN_Low 输出 1.5V,从而输出显性电平表示逻辑 0 。


在 CAN 总线中,必须使它处于隐性电平 (逻辑 1) 或显性电平 (逻辑 0) 中的其中一个状态。假如有两个 CAN 通讯节点,在同一时间,一个输出隐性电平,另一个输出显性电平,类似 I2C 总线的“线与”特性将使它处于显性电平状态,显性电平的名字就是这样来的,即可以认为显性具有优先的意味。
由于 CAN 总线协议的物理层只有 1 对差分线,在一个时刻只能表示一个信号,所以对通讯节点来说,CAN 通讯是半双工的,收发数据需要分时进行。在 CAN 的通讯网络中,因为共用总线,在整个网络中同一时刻只能有一个通讯节点发送信号,其余的节点在该时刻都只能接收。
1.3 CAN 协议层
1.3.1 CAN 的波特率及位同步
由于 CAN 属于异步通讯,没有时钟信号线,连接在同一个总线网络中的各个节点会像串口异步通讯那样,节点间使用约定好的波特率进行通讯,特别地, CAN 还会使用“位同步”的方式来抗干扰、吸收误差,实现对总线电平信号进行正确的采样,确保通讯正常。
1.3.2 位时序分解
为了实现位同步,CAN 协议把每一个数据位的时序分解成如图 所示的 SS 段、PTS 段、PBS1 段、PBS2 段,这四段的长度加起来即为一个 CAN 数据位的长度。分解后最小的时间单位是 Tq,而一个完整的位由 8~25 个 Tq 组成。为方便表示,图 中的高低电平直接代表信号逻辑 0 或逻辑 1(不是差分信号)。

该图中表示的 CAN 通讯信号每一个数据位的长度为 19Tq,其中 SS 段占 1Tq, PTS 段占 6Tq, PBS1段占 5Tq, PBS2 段占 7Tq。信号的采样点位于 PBS1 段与 PBS2 段之间,通过控制各段的长度,可以对采样点的位置进行偏移,以便准确地采样。
各段的作用如介绍下:
• SS 段 (SYNC SEG)
SS 译为同步段,若通讯节点检测到总线上信号的跳变沿被包含在 SS 段的范围之内,则表示节点与总线的时序是同步的,当节点与总线同步时,采样点采集到的总线电平即可被确定为该位的电平。SS 段的大小固定为 1Tq。
• PTS 段 (PROP SEG)
PTS 译为传播时间段,这个时间段是用于补偿网络的物理延时时间。是总线上输入比较器延时和输出驱动器延时总和的两倍。PTS 段的大小可以为 1~8Tq。
• PBS1 段 (PHASE SEG1),
PBS1 译为相位缓冲段,主要用来补偿边沿阶段的误差,它的时间长度在重新同步的时候可以加长。PBS1 段的初始大小可以为 1~8Tq。
• PBS2 段 (PHASE SEG2)
PBS2 这是另一个相位缓冲段,也是用来补偿边沿阶段误差的,它的时间长度在重新同步时可以缩短。PBS2 段的初始大小可以为 2~8Tq。
1.3.3 通讯的波特率
总线上的各个通讯节点只要约定好 1 个 Tq 的时间长度以及每一个数据位占据多少个 Tq,就可以确定 CAN 通讯的波特率。
例如,假设上图中的 1Tq=1us,而每个数据位由 19 个 Tq 组成,则传输一位数据需要时间 T1bit=19us,从而每秒可以传输的数据位个数为:1x10次方/19 = 52631.6 (bps)
这个每秒可传输的数据位的个数即为通讯中的波特率。
1.3.4 同步过程分析
波特率只是约定了每个数据位的长度,数据同步还涉及到相位的细节,这个时候就需要用到数据位内的 SS、PTS、PBS1 及 PBS2 段了。根据对段的应用方式差异, CAN 的数据同步分为硬同步和重新同步。其中硬同步只是当存在“帧起始信号”时起作用,无法确保后续一连串的位时序都是同步的,而重新同步方式可解决该问题,这两种方式具体介绍如下:
(1) 硬同步
若某个 CAN 节点通过总线发送数据时,它会发送一个表示通讯起始的信号 (即下一小节介绍的帧起始信号),该信号是一个由高变低的下降沿。而挂载到 CAN 总线上的通讯节点在不发送数据时,会时刻检测总线上的信号。见图 ,可以看到当总线出现帧起始信号时,某节点检测到总线的帧起始信号不在节点内部时序的 SS 段范围,所以判断它自己的内部时序与总线不同步,因而这个状态的采样点采集得的数据是不正确的。所以节点以硬同步的方式调整,把自己的位时序中的 SS 段平移至总线出现下降沿的部分,获得同步,同步后采样点就可以采集得正确数据了。

(2) 重新同步
前面的硬同步只是当存在帧起始信号时才起作用,如果在一帧很长的数据内,节点信号与总线信号相位有偏移时,这种同步方式就无能为力了。因而需要引入重新同步方式,它利用普通数据位的高至低电平的跳变沿来同步 (帧起始信号是特殊的跳变沿)。重新同步与硬同步方式相似的地方是它们都使用 SS 段来进行检测,同步的目的都是使节点内的 SS 段把跳变沿包含起来。重新同步的方式分为超前和滞后两种情况,以总线跳变沿与 SS 段的相对位置进行区分。第一种相位超前的情况如图 ,节点从总线的边沿跳变中,检测到它内部的时序比总线的时序相对超前 2Tq,这时控制器在下一个位时序中的 PBS1 段增加 2Tq 的时间长度,使得节点与总线时序重新同步。

第二种相位滞后的情况如图 ,节点从总线的边沿跳变中,检测到它的时序比总线的时序相对滞后 2Tq,这时控制器在前一个位时序中的 PBS2 段减少 2Tq 的时间长度,获得同步。

在重新同步的时候,PBS1 和 PBS2 中增加或减少的这段时间长度被定义为“重新同步补偿宽度SJW* (reSynchronization Jump Width)”。一般来说 CAN 控制器会限定 SJW 的最大值,如限定了最大 SJW=3Tq 时,单次同步调整的时候不能增加或减少超过 3Tq 的时间长度,若有需要,控制器会通过多次小幅度调整来实现同步。当控制器设置的 SJW 极限值较大时,可以吸收的误差加大,但通讯的速度会下降
1.3.5 CAN 的报文种类及结构
在 SPI 通讯中,片选、时钟信号、数据输入及数据输出这 4 个信号都有单独的信号线,I2C 协议包含有时钟信号及数据信号 2 条信号线,异步串口包含接收与发送 2 条信号线,这些协议包含的信号都比 CAN 协议要丰富,它们能轻易进行数据同步或区分数据传输方向。而 CAN 使用的是两条差分信号线,只能表达一个信号,简洁的物理层决定了 CAN 必然要配上一套更复杂的协议,如何用一个信号通道实现同样、甚至更强大的功能呢?CAN 协议给出的解决方案是对数据、操作命令 (如读/写) 以及同步信号进行打包,打包后的这些内容称为报文。
1.3.5.1 报文的种类
在原始数据段的前面加上传输起始标签、片选 (识别) 标签和控制标签,在数据的尾段加上 CRC校验标签、应答标签和传输结束标签,把这些内容按特定的格式打包好,就可以用一个通道表达各种信号了,各种各样的标签就如同 SPI 中各种通道上的信号,起到了协同传输的作用。当整个数据包被传输到其它设备时,只要这些设备按格式去解读,就能还原出原始数据,这样的报文就被称为 CAN 的“数据帧”。
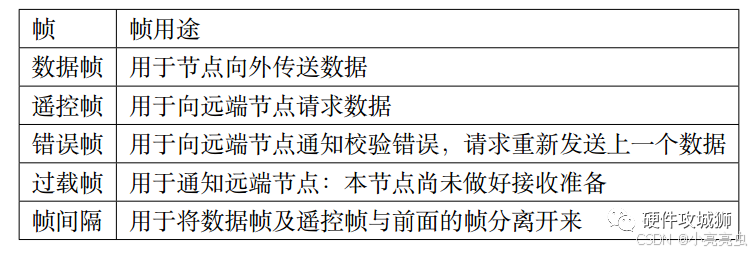
为了更有效地控制通讯,CAN 一共规定了 5 种类型的帧,它们的类型及用途说明如表
1.3.5.2 数据帧的结构
数据帧是在 CAN 通讯中最主要、最复杂的报文,我们来了解它的结构,见图

数据帧以一个显性位 (逻辑 0) 开始,以 7 个连续的隐性位 (逻辑 1) 结束,在它们之间,分别有仲裁段、控制段、数据段、CRC 段和 ACK 段。
• 帧起始
SOF 段 (Start OfFrame),译为帧起始,帧起始信号只有一个数据位,是一个显性电平,它用于通知各个节点将有数据传输,其它节点通过帧起始信号的电平跳变沿来进行硬同步。
• 仲裁段
当同时有两个报文被发送时,总线会根据仲裁段的内容决定哪个数据包能被传输,这也是它名称的由来。

仲裁段的内容主要为本数据帧的 ID 信息 (标识符),数据帧具有标准格式和扩展格式两种,区别就在于 ID 信息的长度,标准格式的 ID 为 11 位,扩展格式的 ID 为 29 位,它在标准 ID 的基础上多出 18 位。在 CAN 协议中, ID 起着重要的作用,它决定着数据帧发送的优先级,也决定着其它节点是否会接收这个数据帧。CAN 协议不对挂载在它之上的节点分配优先级和地址,对总线的占有权是由信息的重要性决定的,即对于重要的信息,我们会给它打包上一个优先级高的 ID,使它能够及时地发送出去。也正因为它这样的优先级分配原则,使得 CAN 的扩展性大大加强,在总线上增加或减少节点并不影响其它设备。报文的优先级,是通过对 ID 的仲裁来确定的。根据前面对物理层的分析我们知道如果总线上同时出现显性电平和隐性电平,总线的状态会被置为显性电平,CAN 正是利用这个特性进行仲裁。
若两个节点同时竞争 CAN 总线的占有权,当它们发送报文时,若首先出现隐性电平,则会失去对总线的占有权,进入接收状态。见图 ,在开始阶段,两个设备发送的电平一样,所以它们一直继续发送数据。到了图中箭头所指的时序处,节点单元 1 发送的为隐性电平,而此时节点单元 2 发送的为显性电平,由于总线的“线与”特性使它表达出显示电平,因此单元 2 竞争总线成功,这个报文得以被继续发送出去。
仲裁段 ID 的优先级也影响着接收设备对报文的反应。因为在 CAN 总线上数据是以广播的形式发送的,所有连接在 CAN 总线的节点都会收到所有其它节点发出的有效数据,因而我们的 CAN控制器大多具有根据 ID 过滤报文的功能,它可以控制自己只接收某些 ID 的报文。回看数据帧格式,可看到仲裁段除了报文 ID 外,还有 RTR、IDE 和 SRR 位。
(1) RTR 位 (Remote Transmission Request Bit),译作远程传输请求位,它是用于区分数据帧和遥控帧的,当它为显性电平时表示数据帧,隐性电平时表示遥控帧。
(2) IDE 位 (Identifier ExtensionBit),译作标识符扩展位,它是用于区分标准格式与扩展格式,当它为显性电平时表示标准格式,隐性电平时表示扩展格式。
(3) SRR 位 (Substitute Remote Request Bit),只存在于扩展格式,它用于替代标准格式中的 RTR位。由于扩展帧中的 SRR 位为隐性位,RTR 在数据帧为显性位,所以在两个 ID 相同的标准格式报文与扩展格式报文中,标准格式的优先级较高。
• 控制段
在控制段中的 r1 和 r0 为保留位,默认设置为显性位。它最主要的是 DLC 段 (Data Length Code),译为数据长度码,它由 4 个数据位组成,用于表示本报文中的数据段含有多少个字节, DLC 段表示的数字为 0~8。
• 数据段
数据段为数据帧的核心内容,它是节点要发送的原始信息,由 0~8 个字节组成,MSB 先行。
• CRC 段
为了保证报文的正确传输,CAN 的报文包含了一段 15 位的 CRC 校验码,一旦接收节点算出的CRC 码跟接收到的 CRC 码不同,则它会向发送节点反馈出错信息,利用错误帧请求它重新发送。CRC 部分的计算一般由 CAN 控制器硬件完成,出错时的处理则由软件控制最大重发数。在 CRC 校验码之后,有一个 CRC 界定符,它为隐性位,主要作用是把 CRC 校验码与后面的 ACK段间隔起来。
• ACK 段
ACK 段包括一个 ACK 槽位,和 ACK 界定符位。类似 I2C 总线,在 ACK 槽位中,发送节点发送的是隐性位,而接收节点则在这一位中发送显性位以示应答。在 ACK 槽和帧结束之间由 ACK 界定符间隔开。
• 帧结束
EOF 段 (End Of Frame),译为帧结束,帧结束段由发送节点发送的 7 个隐性位表示结束。
1.3.5.3 其它报文的结构


相关文章:
16.1.STM32F407ZGT6-CAN基础概念
参考: https://blog.csdn.net/sunlight_vip/article/details/128639144 前言: 学习总结CAN的知识点: 1.can是什么,历史由来和背景 2.can的物理层,链路层 3.初始化的流程和关键点 4.波特率怎么设置 5.can id怎么过滤 6…...

记忆化搜索和动态规划 --最长回文子串为例
记忆化搜索 记忆化搜索是一种优化递归算法的方法,通过将已经计算过的子问题的结果存储起来(通常使用哈希表或数组),避免重复计算相同的子问题。 本质上是通过缓存中间结果来减少计算的重复性。 动态规划 动态规划是通过将问题分…...

【论文笔记】Fast3R:前向并行muti-view重建方法
众所周知,DUSt3R只适合做稀疏视角重建,与sapnn3r的目的类似,这篇文章以并行的方法,扩展了DUSt3R在多视图重建中的能力。 abstract 多视角三维重建仍然是计算机视觉领域的核心挑战,尤其是在需要跨不同视角实现精确且可…...
)
cf div3 998 E(并查集)
E : 给出两个简单无向图 (没有重边和自环)f g . 可以对f 进行 删边 和加边 的操作。问至少操作多少次 ,使得 f 和 g 的 点的联通情况相同(并查集的情况相同) 首先思考删边 : 对于 我 f 图存在边 e &#x…...
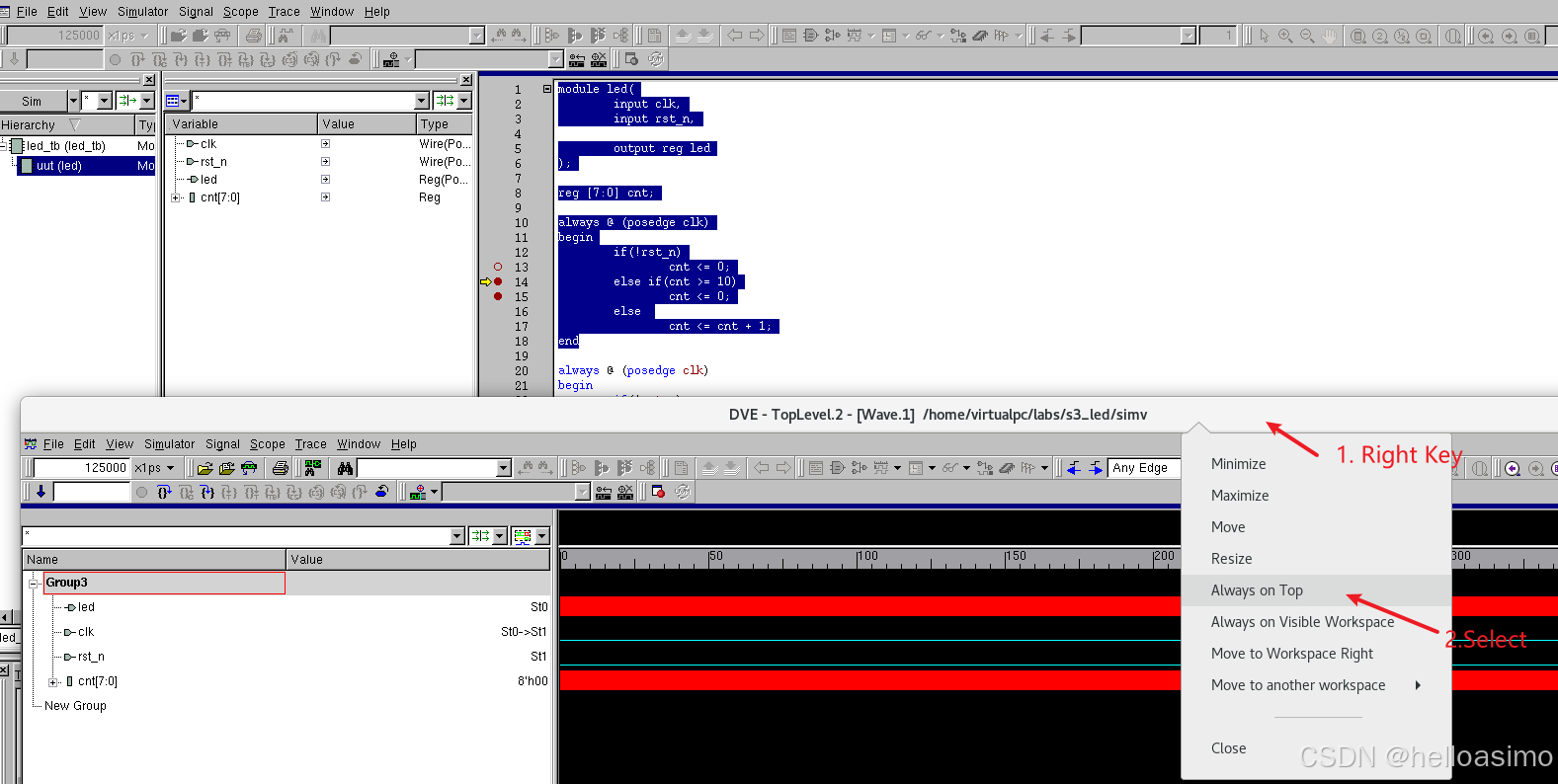
使用VCS对Verilog/System Verilog进行单步调试的步骤
Verilog单步调试: System Verilog进行单步调试的步骤如下: 1. 编译设计 使用-debug_all或-debug_pp选项编译设计,生成调试信息。 我的4个文件: 1.led.v module led(input clk,input rst_n,output reg led );reg [7:0] cnt;alwa…...

Pyside6异步通信测试
#第一种方式,借助qasync实现。使用pip install qasync安装。 from PySide6.QtWidgets import * from PySide6.QtCore import * from PySide6.QtGui import * import asyncio from qasync import QEventLoop, asyncSlotclass Form(QWidget):def __init__(self,paren…...

[ESP32:Vscode+PlatformIO]新建工程 常用配置与设置
2025-1-29 一、新建工程 选择一个要创建工程文件夹的地方,在空白处鼠标右键选择通过Code打开 打开Vscode,点击platformIO图标,选择PIO Home下的open,最后点击new project 按照下图进行设置 第一个是工程文件夹的名称 第二个是…...

如何使用 DeepSeek API 结合 VSCode 提升开发效率
引言 在当今的软件开发领域,API 的使用已经成为不可或缺的一部分。DeepSeek 是一个强大的 API 平台,提供了丰富的功能和数据,可以帮助开发者快速构建和优化应用程序。而 Visual Studio Code(VSCode)作为一款轻量级但功…...

自定义数据集 ,使用朴素贝叶斯对其进行分类
数据集定义: - data 列表包含了文本样本及其对应的情感标签。每个元素是一个元组,第一个元素是文本,第二个元素是标签。 特征提取: - 使用 CountVectorizer 将文本转换为词频向量。 fit_transform 方法在训练数据上拟合向量器…...

Flutter使用Flavor实现切换环境和多渠道打包
在Android开发中通常我们使用flavor进行多渠道打包,flutter开发中同样有这种方式,不过需要在原生中配置 具体方案其实flutter官网个了相关示例(https://docs.flutter.dev/deployment/flavors),我这里记录一下自己的操作 Android …...

C# lock使用详解
总目录 前言 在 C# 多线程编程中,lock 关键字是一种非常重要的同步机制,用于确保同一时间只有一个线程可以访问特定的代码块,从而避免多个线程同时操作共享资源时可能出现的数据竞争和不一致问题。以下是关于 lock 关键字的详细使用介绍。 一…...

C# 接口介绍
.NET学习资料 .NET学习资料 .NET学习资料 一、接口的定义 在 C# 中,接口是一种特殊的抽象类型,它定义了一组方法签名,但不包含方法的实现。接口使用interface关键字来声明。例如,定义一个表示形状的接口IShape: in…...

第三周 树
猫猫和企鹅 分数 10 全屏浏览 切换布局 作者 姜明欣 单位 河北大学 王国里有 nn 个居住区,它们之间有 n−1 条道路相连,并且保证从每个居住区出发都可以到达任何一个居住区,并且每条道路的长度都为 1。 除 1号居住区外,每个居…...

OpenAI 实战进阶教程 - 第四节: 结合 Web 服务:构建 Flask API 网关
目标 学习将 OpenAI 接入 Web 应用,构建交互式 API 网关理解 Flask 框架的基本用法实现 GPT 模型的 API 集成并返回结果 内容与实操 一、环境准备 安装必要依赖: 打开终端或命令行,执行以下命令安装 Flask 和 OpenAI SDK: pip i…...

Nginx 中文文档
文章来源:nginx 文档 -- nginx中文文档|nginx中文教程 nginx 文档 介绍 安装 nginx从源构建 nginx新手指南管理员指南控制 nginx连接处理方法设置哈希调试日志记录到 syslog配置文件测量单位命令行参数适用于 Windows 的 nginx支持 QUIC 和 HTTP/3 nginx 如何处理…...

Java 泛型<? extends Object>
在 Java 泛型中,<? extends Object> 和 <?> 都表示未知类型,但它们在某些情况下有细微的差异。泛型的引入是为了消除运行时错误并增强类型安全性,使代码更具可读性和可维护性。 在 JDK 5 中引入了泛型,以消除编译时…...

鲸鱼算法 matlab pso
算法原理 鲸鱼优化算法的核心思想是通过模拟座头鲸的捕食过程来进行搜索和优化。座头鲸在捕猎时会围绕猎物游动并产生气泡网,迫使猎物聚集。这一行为被用来设计搜索策略,使算法能够有效地找到全局最优解。 算法步骤 初始化:随机生成一…...

Hot100之堆
我们的PriorityQueue默认为最小堆,堆顶总是为最小 215数组中的第K个最大元素 题目 思路解析 暴力解法(不符合时间复杂度) 题目要求我们找到「数组排序后的第 k 个最大的元素,而不是第 k 个不同的元素」。「数组排序后的第 k …...

KNIME:开源 AI 数据科学
KNIME(Konstanz Information Miner)是一款开源且功能强大的数据科学平台,由德国康斯坦茨大学的软件工程师团队开发,自2004年推出以来,广泛应用于数据分析、数据挖掘、机器学习和可视化等领域。以下是对KNIME的深度介绍…...

Office / WPS 公式、Mathtype 公式输入花体字、空心字
注:引文主要看注意事项。 1、Office / WPS 公式中字体转换 花体字 字体选择 “Eulid Math One” 空心字 字体选择 “Eulid Math Two” 2、Mathtype 公式输入花体字、空心字 2.1 直接输入 花体字 在 mathtype 中直接输入 \mathcal{L} L \Large \mathcal{L} L…...

[HOT 100] 2824. 统计和小于目标的下标对数目
文章目录 1. 题目链接2. 题目描述3. 题目示例4. 解题思路5. 题解代码6. 复杂度分析 1. 题目链接 2824. 统计和小于目标的下标对数目 - 力扣(LeetCode) 2. 题目描述 给你一个下标从 0 开始长度为 n 的整数数组 nums 和一个整数 target ,请你…...

建表注意事项(2):表约束,主键自增,序列[oracle]
没有明确写明数据库时,默认基于oracle 约束的分类 用于确保数据的完整性和一致性。约束可以分为 表级约束 和 列级约束,区别在于定义的位置和作用范围 复合主键约束: 主键约束中有2个或以上的字段 复合主键的列顺序会影响索引的使用,需谨慎设计 添加…...
Ubuntu20.04 磁盘空间扩展教程
Ubuntu20.04 磁盘空间扩展教程_ubuntu20 gpart扩容-CSDN博客文章浏览阅读2w次,点赞38次,收藏119次。执行命令查看系统容量相关的数据:df -h当前容量为20G,已用18G(96%),可用844M,可用…...

冯诺依曼体系架构和操作系统的概念
1.冯诺依曼体系架构 计算机的硬件大部分都遵循冯诺依曼体系架构,其图示如下 这里的存储器指的是内存,是一种断电易失的设备。 速度快 而磁盘,是一种永久存储的设备,其属于外设既是输出设备又是输入设备。速度慢 而运算器是一种…...
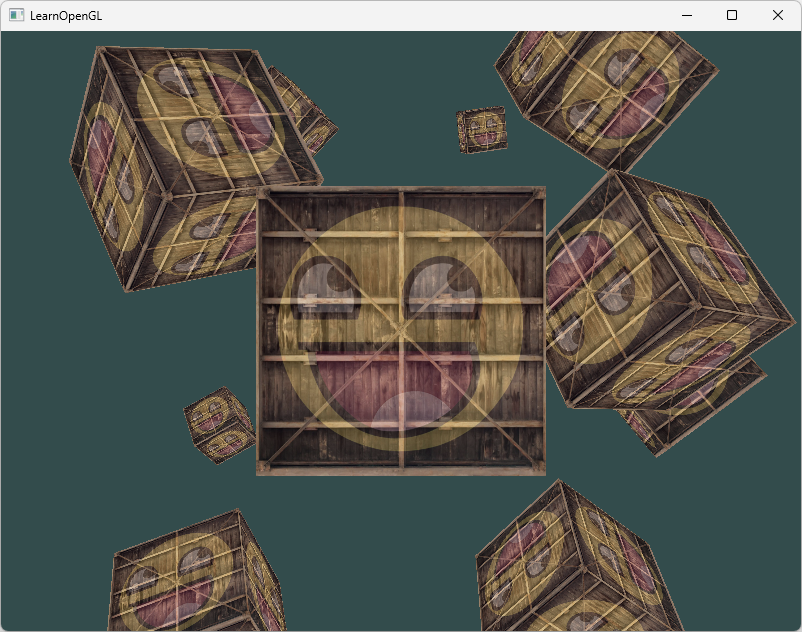
OpenGL学习笔记(六):Transformations 变换(变换矩阵、坐标系统、GLM库应用)
文章目录 向量变换使用GLM变换(缩放、旋转、位移)将变换矩阵传递给着色器坐标系统与MVP矩阵三维变换绘制3D立方体 & 深度测试(Z-buffer)练习1——更多立方体 现在我们已经知道了如何创建一个物体、着色、加入纹理。但它们都还…...

Linux第105步_基于SiI9022A芯片的RGB转HDMI实验
SiI9022A是一款HDMI传输芯片,可以将“音视频接口”转换为HDMI或者DVI格式,是一个视频转换芯片。本实验基于linux的驱动程序设计。 SiI9022A支持输入视频格式有:xvYCC、BTA-T1004、ITU-R.656,内置DE发生器,支持SYNC格式…...

测试工程师的DS使用指南
目录 引言DeepSeek在测试设计中的应用 2.1 智能用例生成2.2 边界值分析2.3 异常场景设计DeepSeek在自动化测试中的应用 3.1 脚本智能转换3.2 日志智能分析3.3 测试数据生成DeepSeek在质量保障体系中的应用 4.1 测试策略优化4.2 缺陷模式预测4.3 技术方案验证DeepSeek在测试效能…...

Qt常用控件 输入类控件
文章目录 1.QLineEdit1.1 常用属性1.2 常用信号1.3 例子1,录入用户信息1.4 例子2,正则验证手机号1.5 例子3,验证输入的密码1.6 例子4,显示密码 2. QTextEdit2.1 常用属性2.2 常用信号2.3 例子1,获取输入框的内容2.4 例…...

linux运行级别
运行级别:指linux系统在启动和运行过程中所处的不同的状态。 运行级别之间的切换:init (级别数) 示例: linux的运行级别一共有7种,分别是: 运行级别0:停机状态 运行级别1:单用户模式/救援模式…...
数据结构课程设计(四)校园导航
4 校园导航 4.1 需求规格说明 【问题描述】 一个学校平面图,至少包括10个以上的场所,每个场所带有编号、坐标、名称、类别等信息,两个场所间可以有路径相通,路长(耗时)各有不同。要求读取该校园平面图&a…...