共享模型之管程(悲观锁)
共享模型之管程(悲观锁)
文章目录
- 共享模型之管程(悲观锁)
- 一、常见线程安全的类
- 二、对象头
- 三、Monitor(监视器 / 管程)
- 四、偏向锁
- 偏向锁的实现原理
- 撤销偏向锁
- 五、轻量级锁
- 轻量级锁的释放
- 六、重量级锁
- 七、锁的升级流程
- 八、sleep / wait / park
- sleep
- wait
- park
- 九、多把锁相关
- 十、ReentrantLock
一、常见线程安全的类
- String
- Integer
- StringBuffer
- Random
- Vector
- Hashtable
- java.util.concurrent 包下的类
他们的每个方法是原子的,但多个方法的组合不是原子的!
二、对象头
-
普通对象头

Mark Word 用来存储对象的 hashCode 或者锁信息等。
Klass Word 存储到对象类型数据的指针 -
数组对象头

Array length 存储了数组的长度 -
其中32位 Mark Word 的结构为

-
其中64位 Mark Word 的结构为

从上到下对应的是无锁、偏向锁、轻量级锁、重量级锁以及GC标志。
可以看到,当对象状态为偏向锁时,Mark Word 存储的是偏向的线程 ID;
当状态为轻量级锁时,Mark Word 存储的是指向线程栈中 Lock Record 的指针;
当状态为重量级锁时,Mark Word 为指向堆中的 monitor(监视器)对象的指针。
三、Monitor(监视器 / 管程)
在 Java 中,监视器(monitor)是一种同步工具,用于保护共享数据,避免多线程并发访问导致数据不一致。在 Java 中,每个对象都有一个内置的监视器。
监视器包括两个重要部分,一个是锁,一个是等待/通知机制,后者是通过 Object 类中的wait(), notify(), notifyAll()等方法实现的。

刚开始 Monitor 中 Owner 为 null,当 Thread-2 执行 synchronized(obj) 就会将 Monitor 的所有者 Owner 置为 Thread-2,Monitor中只能有一个 Owner。
在 Thread-2 上锁的过程中,如果 Thread-3,Thread-4,Thread-5 也来执行 synchronized(obj),就会进入EntryList BLOCKED,Thread-2 执行完同步代码块的内容,然后唤醒 EntryList 中等待的线程来竞争锁,竞争的时是非公平的。
Owner 线程发现条件不满足,调用 wait 方法,即可进入 WaitSet 变为 WAITING 状态,BLOCKED 和 WAITING 的线程都处于阻塞状态,不占用 CPU 时间片,BLOCKED 线程会在 Owner 线程释放锁时唤醒,WAITING 线程会在 Owner 线程调用 notify 或 notifyAll 时唤醒,但唤醒后并不意味者立刻获得锁,仍需进入EntryList 重新竞争。
四、偏向锁
Hotspot 的作者经过以往的研究发现大多数情况下锁不仅不存在多线程竞争,而且总是由同一线程多次获得,于是引入了偏向锁。
偏向锁会偏向于第一个访问锁的线程,如果在接下来的运行过程中,该锁没有被其他的线程访问,则持有偏向锁的线程将永远不需要触发同步。也就是说,偏向锁在资源无竞争情况下消除了同步语句,连 CAS(后面会细讲,戳链接直达) 操作都不做了,着极大地提高了程序的运行性能。
大白话就是对锁设置个变量,如果发现为 true,代表资源无竞争,则无需再走各种加锁/解锁流程。如果为 false,代表存在其他线程竞争资源,那么就会走后面的流程。
偏向锁的实现原理
一个线程在第一次进入同步块时,会在对象头和栈帧中的锁记录里存储锁偏向的线程 ID。当下次该线程进入这个同步块时,会去检查锁的 Mark Word 里面是不是放的自己的线程 ID。如果是,表明该线程已经获得了锁,以后该线程在进入和退出同步块时不需要花费 CAS 操作来加锁和解锁(对比来说轻量级锁每次都需要生成锁记录,然后用锁记录替换 markword );如果不是,就代表有另一个线程来竞争这个偏向锁。这个时候会尝试使用 CAS 来替换 Mark Word 里面的线程 ID 为新线程的 ID,这个时候要分两种情况:
成功,表示之前的线程不存在了, Mark Word 里面的线程 ID 为新线程的 ID,锁不会升级,仍然为偏向锁;
失败,表示之前的线程仍然存在,那么暂停之前的线程,设置偏向锁标识为 0,并设置锁标志位为 00,升级为轻量级锁,会按照轻量级锁的方式进行竞争锁。
CAS 是比较并设置的意思,用于在硬件层面上提供原子性操作。在 在某些处理器架构(如x86)中,比较并交换通过指令 CMPXCHG 实现((Compare and Exchange),一种原子指令),通过比较是否和给定的数值一致,如果一致则修改,不一致则不修改。

图中涉及到了 lock record 指针指向当前堆栈中的最近一个 lock record,是轻量级锁按照先来先服务的模式进行了轻量级锁的加锁。
撤销偏向锁
偏向锁使用了一种等到竞争出现才释放锁的机制,所以当其他线程尝试竞争偏向锁时,持有偏向锁的线程才会释放锁。
偏向锁升级成轻量级锁时,会暂停拥有偏向锁的线程,重置偏向锁标识,这个过程看起来容易,实则开销还是很大的,大概的过程如下:
在一个安全点(在这个时间点上没有字节码正在执行)停止拥有锁的线程。
遍历线程栈,如果存在锁记录的话,需要修复锁记录和 Mark Word,使其变成无锁状态。
唤醒被停止的线程,将当前锁升级成轻量级锁。
所以,如果应用程序里所有的锁通常处于竞争状态,那么偏向锁就会是一种累赘,对于这种情况,我们可以一开始就把偏向锁这个默认功能给关闭。
调用对象的 hashCode 函数时会生成 hashCode,但对于偏向锁 Mark Word 里记录的是线程 id,没地方放哈希值,所以会撤销偏向锁。轻量级锁在锁记录里记录 hashCode,重量级锁会在 Monitor 中记录 hashCode。
调用 wait() 或 notify() 方法会触发偏向锁的撤销,并升级为重量级锁。这是因为 wait() 和 notify() 引入了线程间的竞争和同步机制,而偏向锁无法应对这种场景。

五、轻量级锁
多个线程在不同时段获取同一把锁,即不存在锁竞争的情况,也就没有线程阻塞。针对这种情况,JVM 采用轻量级锁来避免线程的阻塞与唤醒。
JVM 会为每个线程在当前线程的栈帧中创建用于存储锁记录的空间,我们称为 Displaced Mark Word。如果一个线程获得锁的时候发现是轻量级锁,会把锁的 Mark Word 复制到自己的 Displaced Mark Word 里面。
然后线程尝试用 CAS 将锁的 Mark Word 替换为指向锁记录的指针。如果成功,当前线程获得锁,如果失败,表示 Mark Word 已经被替换成了其他线程的锁记录,说明在与其它线程竞争锁,当前线程就尝试使用自旋来获取锁。
自旋:不断尝试去获取锁,一般用循环来实现。
自旋是需要消耗 CPU 的,如果一直获取不到锁的话,那该线程就一直处在自旋状态,白白浪费 CPU 资源。解决这个问题最简单的办法就是指定自旋的次数,例如让其循环 10 次,如果还没获取到锁就进入阻塞状态。
但是 JDK 采用了更聪明的方式——适应性自旋,简单来说就是线程如果自旋成功了,则下次自旋的次数会更多,如果自旋失败了,则自旋的次数就会减少。
自旋也不是一直进行下去的,如果自旋到一定程度(和 JVM、操作系统相关),依然没有获取到锁,称为自旋失败,那么这个线程会阻塞。同时这个锁就会升级成重量级锁。
轻量级锁的释放
在释放锁时,当前线程会使用 CAS 操作将 Displaced Mark Word 的内容复制回锁的 Mark Word 里面。如果没有发生竞争,那么这个复制的操作会成功。如果有其他线程因为自旋多次导致轻量级锁升级成了重量级锁,那么 CAS 操作会失败,此时会释放锁并唤醒被阻塞的线程。

六、重量级锁
重量级锁依赖于操作系统的互斥锁(mutex,用于保证任何给定时间内,只有一个线程可以执行某一段特定的代码段) 实现,而操作系统中线程间状态的转换需要相对较长的时间,所以重量级锁效率很低,但被阻塞的线程不会消耗 CPU。
每一个对象都可以当做一个锁,当多个线程同时请求某个对象锁时,对象锁会设置几种状态用来区分请求的线程:
Contention List:所有请求锁的线程将被首先放置到该竞争队列
Entry List:Contention List 中那些有资格成为候选人的线程被移到 Entry List
Wait Set:那些调用 wait 方法被阻塞的线程被放置到 Wait Set
OnDeck:任何时刻最多只能有一个线程正在竞争锁,该线程称为 OnDeck
Owner:获得锁的线程称为 Owner
!Owner:释放锁的线程
当一个线程尝试获得锁时,如果该锁已经被占用,则会将该线程封装成一个ObjectWaiter对象插入到 Contention List 队列的队首,然后调用park 方法挂起当前线程。
当线程释放锁时,会从 Contention List 或 EntryList 中挑选一个线程唤醒,被选中的线程叫做Heir presumptive即假定继承人,假定继承人被唤醒后会尝试获得锁,但synchronized是非公平的,所以假定继承人不一定能获得锁。
这是因为对于重量级锁,如果线程尝试获取锁失败,它会直接进入阻塞状态,等待操作系统的调度。
如果线程获得锁后调用Object.wait方法,则会将线程加入到 WaitSet 中,当被Object.notify唤醒后,会将线程从 WaitSet 移动到 Contention List 或 EntryList 中去。需要注意的是,当调用一个锁对象的wait或notify方法时,如当前锁的状态是偏向锁或轻量级锁则会先膨胀成重量级锁。
七、锁的升级流程
每一个线程在准备获取共享资源时: 第一步,检查 MarkWord 里面是不是放的自己的 ThreadId ,如果是,表示当前线程是处于 “偏向锁” 。
第二步,如果 MarkWord 不是自己的 ThreadId,锁升级,这时候,用 CAS 来执行切换,新的线程根据 MarkWord 里面现有的 ThreadId,通知之前线程暂停,之前线程将 Markword 的内容置为空。
第三步,两个线程都把锁对象的 HashCode 复制到自己新建的用于存储锁的记录空间,接着开始通过 CAS 操作, 把锁对象的 Markword 的内容修改为自己新建的记录空间的地址的方式竞争 MarkWord。
第四步,第三步中成功执行 CAS 的获得资源,失败的则进入自旋 。
第五步,自旋的线程在自旋过程中,成功获得资源(即之前获的资源的线程执行完成并释放了共享资源),则整个状态依然处于 轻量级锁的状态,如果自旋失败 。
第六步,进入重量级锁的状态,这个时候,自旋的线程进行阻塞,等待之前线程执行完成并唤醒自己。
八、sleep / wait / park
sleep
sleep 是 Thread 类的静态方法,它的作用是让当前线程暂停执行一段指定的时间(毫秒或纳秒),到时间后自动恢复,无需外部干预,但暂停期间不会释放持有的锁。
wait
wait 是Object类的实例方法,它的作用是让当前线程暂停执行,进入waitSet等待,并释放持有的锁,直到其他线程调用 notify() 或 notifyAll() 唤醒它。
与sleep不同的是它会释放锁,并且需要 synchronized 配合,需要外部唤醒。
park
park 是 LockSupport 类的静态方法,它的作用是暂停线程的执行,直到其他线程调用 unpark() 或线程被中断,暂停期间不会释放持有的锁。
它不需要配合 synchronized,也不会释放锁资源,unpark() 会提前提供一个许可证,下次 park 时不会进入阻塞。
九、多把锁相关
多把锁的优势是可以增加并发度,但是如果一个线程需要多把锁就容易发生死锁,例如哲学家就餐问题。死锁属于活跃性问题,除了死锁还有活锁和饥饿两种情况。活锁是两个线程互为对方的结束条件而无法结束,饥饿则是一个线程的优先级太低,始终无法得到CPU的调度,拿不到锁。
十、ReentrantLock
可重入是指同一个线程如果首次获得了这把锁,那么因为它是这把锁的拥有者,因此有权利再次获取这把锁。如果是不可重入锁,那么第二次获得锁时,自己也会被锁挡住。
- 可重入锁的等待期间可以被 interrupt 打断。
- 获取锁超时会立即失败。
- ReentrantLock 默认是不公平的,也支持公平模式。
- ReentrantLock 支持多个条件变量(多间休息室)。
- 内部维护持有计数,记录锁被同一线程获取的次数,确保完全释放。
相关文章:
共享模型之管程(悲观锁)
共享模型之管程(悲观锁) 文章目录 共享模型之管程(悲观锁)一、常见线程安全的类二、对象头三、Monitor(监视器 / 管程)四、偏向锁偏向锁的实现原理撤销偏向锁 五、轻量级锁轻量级锁的释放 六、重量级锁七、…...

零基础C语言学习日志22(自定义类型:联合和枚举)
目录 联合体 联合体类型的声明 联合体的特点 相同成员联合体和结构体的对比 联合体大小的计算 例子 枚举类型 枚举类型的声明 枚举类型的优点 枚举类型的使用 联合体 联合体类型的声明 像结构体一样,联合体也是由一个或者多个成员构成,这些成…...

ROS2 Rviz 实战:给 panda 机械臂场景塞个圆柱体
视频讲解 ROS2 Rviz 实战:给 panda 机械臂场景塞个圆柱体 创建add_cylinder的package ros2 pkg create add_cylinder --build-type ament_cmake --dependencies rclcpp control_msgs moveit_ros_planning_interface 在src中添加add_cylinder.cpp,如下 #…...
DeepSeek+知识库+鸿蒙,助力鸿蒙高效开发
不知道你们发现没有,就是鸿蒙开发官网,文档也太多太多了,对于新手来说确实头疼,开发者大多是极客,程序的目的是让世界更高效!看文档,挺头疼的,毕竟都是理科生。 遇到问题不要慌&…...
从零开始在Windows使用VMware虚拟机安装黑群晖7.2系统并实现远程访问
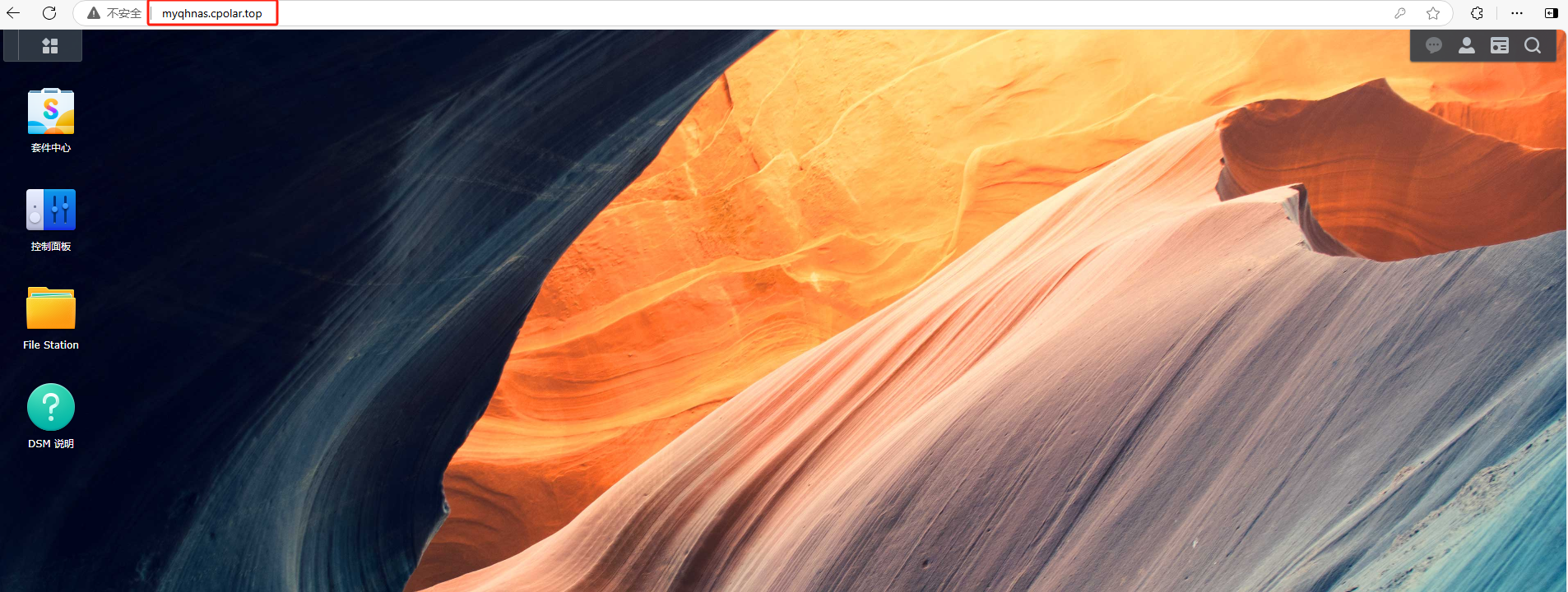
文章目录 前言1.软件准备2. 安装VMware17虚拟机3.安装黑群晖4. 安装群晖搜索助手5. 配置黑群晖系统6. 安装内网穿透6.1 下载cpolar套件6.2 配置群辉虚拟机6.3 配置公网地址6.4 配置固定公网地址 总结 前言 本文主要介绍如何从零开始在Windows系统电脑使用VMware17虚拟机安装黑…...

爬虫逆向:脱壳工具 frida-dexdump 的使用详解
更多内容请见: 爬虫和逆向教程-专栏介绍和目录 文章目录 1. 工具简介1.1 frida-dexdump介绍1.2 frida-dexdump支持场景1.3 frida-dexdump优点1.4 frida-dexdump工具使用方法2. 环境准备3. 安装 frida-dexdump4. 使用步骤4.1 步骤一:连接 Android 设备4.1 步骤二:安装目标应用…...
——查询计划相关操作符(9))
SQL Server查询计划操作符(7.3)——查询计划相关操作符(9)
7.3. 查询计划相关操作符 78)Repartition Streams:该操作符消费多个输入流并产生多个输出流。期间,记录内容与格式保持不变。如果查询优化器使用一个位图过滤(bitmap filter),则输出流中的数据行数将会减少。一个输入流的每行记录被放入一个输出流。如果该操作符保留顺序…...

【LeetCode101】对称二叉树
题目描述 给你一个二叉树的根节点 root , 检查它是否轴对称。 思路与算法 对称:左右子树互为镜像 这很显然暗示了一种递归方法 确定base case(s) 如果 left 和 right 都是 None ,那么它们是镜像的(对称&…...

K8s 1.27.1 实战系列(四)验证集群及应用部署测试
一、验证集群可用性 1、检查节点 kubectl get nodes ------------------------------------------------------ NAME STATUS ROLES AGE VERSION k8s-master Ready control-plane 3h48m v1.27.1 k8s-node1 Ready <none> …...
)
api测试工具(postman、apifox、apipost)
一、apifox 整体不错,免费版性能好,但内网(离线状态)初次使用需要登陆,无法通过。(即内网不可用) 二、postman 当测试项目多的时候可能会卡死,卡输入修改、丢失请求、登陆账号等问题…...
【STM32】STM32系列产品以及新手入门的STM32F103
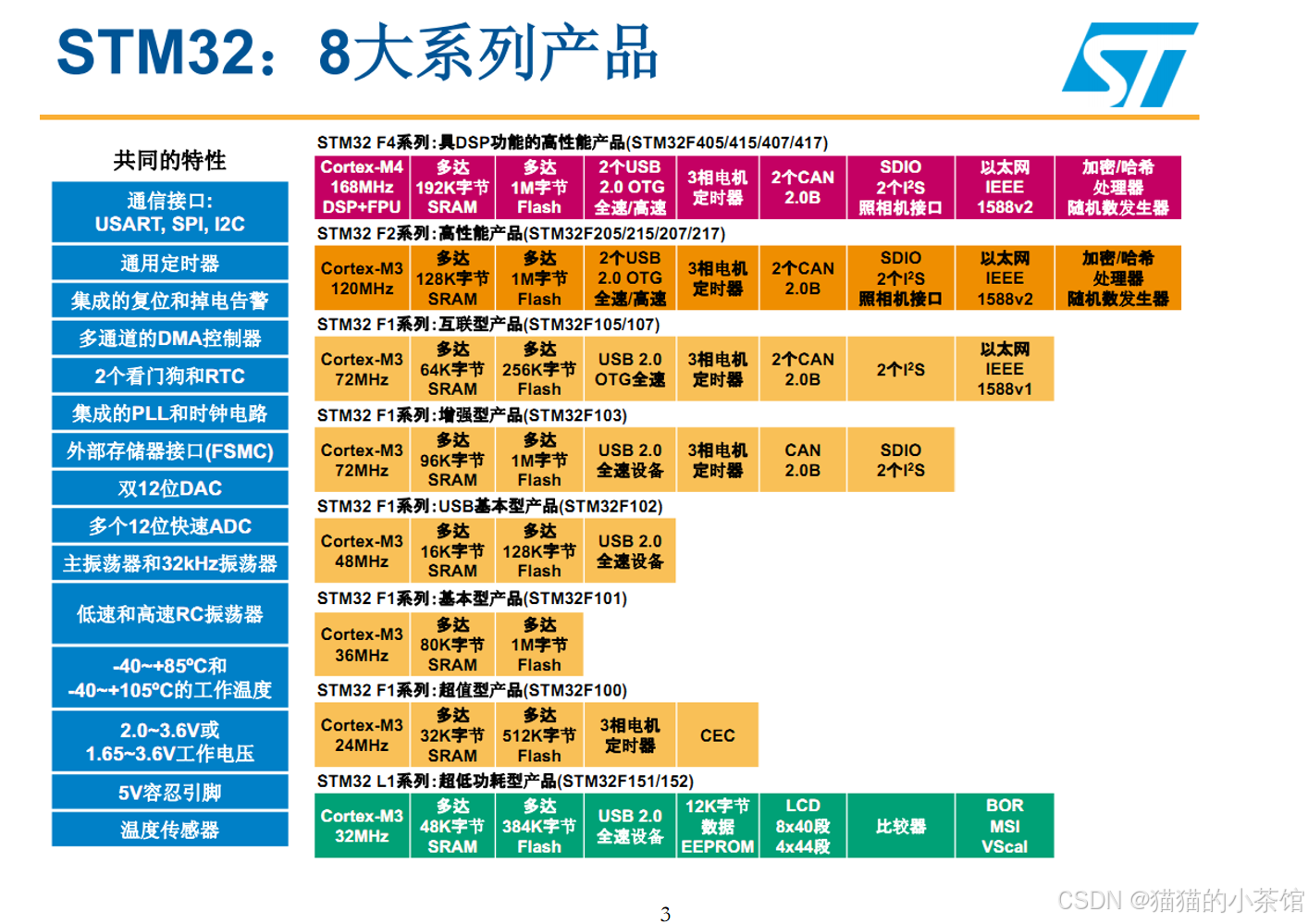
📢 STM32F103xC/D/E 系列是一款高性能、低功耗的 32 位 MCU,适用于工业、汽车、消费电子等领域;基于 ARM Cortex-M3,主频最高 72MHz,支持 512KB Flash、64KB SRAM,适合复杂嵌入式应用,提供丰富的…...

pycharm找不到conda可执行文件
conda 24.9.2 在pycharm的右下角就可以切换python解释器了...

自注意力机制的演进-从Transformer架构到DeepSeek-R1模型的深度语义理解革新
2025年,我国发布了开创性且高性价比的大语言模型-DeepSeek-R1,推动了AI领域的重大变革。本章节回顾了LLM的发展历程,其起点可追溯至2017年Transformer架构的提出,该架构通过自注意力机制(Self-Attention)彻底革新了自然语言处理技…...

Redis 脚本:高效数据管理的利器
Redis 脚本:高效数据管理的利器 引言 Redis,作为一款高性能的键值存储数据库,以其丰富的数据结构和操作命令,在互联网应用中扮演着重要的角色。Redis 脚本作为一种强大的工具,能够帮助开发者高效地管理和处理数据。本文将深入探讨 Redis 脚本的应用场景、编写技巧以及在…...
(标准,C++11 和 C++14,C++17,C++20))
C++学习(十)(标准,C++11 和 C++14,C++17,C++20)
C 标准 C 标准是一组定义语言功能、语法和语义的规则和准则。国际标准化组织 (ISO) 负责维护和更新 C 标准。这些标准的主要目的是确保跨多个平台和编译器的一致性、效率和可维护性。 以下是迄今为止发布的不同 C 标准的简要摘要: C98/C03&…...

动态内存管理的了解及使用
目录 1.什么是动态内存? 2.为什么要使用动态内存分配空间? 3.动态内存开辟函数malloc,calloc,realloc 3.1 malloc 3.2 calloc 3.3 realloc 3.4 头文件包含 4.动态内存释放函数free 5.动态内存的基本常见错误 5.1 对NULL…...

大模型推理显存优化:从KV Cache压缩到量化策略实战
引言:显存瓶颈的困境 随着ChatGPT等大语言模型的广泛应用,模型推理过程中的显存占用问题日益凸显。以典型的Llama2-13B模型为例,单次推理就需要占用超过6GB显存,严重制约了服务吞吐量和硬件利用率。本文将深入探讨大模型推理中的…...

pom.xml配置(mybatisplus增删改查实现;PageInfo分页实现;JSONObject实现)
一、mybatisplus增删改查实现 pom.xml <!-- mybatis-plus --><dependency><groupId>com.baomidou</groupId><artifactId>mybatis-plus-boot-starter</artifactId><version>3.5.2</version></dependency>在mapper文件里…...

File文件和目录
一、文件和目录相关概念 计算机文件(File):以计算机硬盘为载体存储在计算机上的信息集合,可以是文本(.txt)、图片(.jpg、.png、.jpeg)、视频(.mp4)、程序(.exe)等,文件一般有拓展名,表示文件的类型。 文件…...

【运维笔记】Navicat中删除mongo 某个时间之前的数据
【运维笔记】Navicat中删除mongo 某个时间之前的数据 一、场景与需求1.1、场景1.2、需求 二、解决方案三、实战3.1、【Navicat】使用sql语句 (推荐)Step 1:使用查询窗口 - 查询Step 2:确认第一步的数据是否是需要删除的数据Step 3…...

BUUCTF逆向刷题笔记(1-12)
easyre、内涵的软件、xor、不一样的flag: buuctf reverse部分题解(实时更新)_reverse 题解-CSDN博客 请见小库里的blog。 reverse1 查壳发现没有,而且是64位 粗略改一下部分函数名,看看主要逻辑。 第一个for循环暂…...

如何改变怂怂懦弱的气质(2)
你是否曾经因为害怕失败而逃避选择?是否因为不敢拒绝别人而让自己陷入困境?是否因为过于友善而被人轻视?如果你也曾为这些问题困扰,那么今天的博客就是为你准备的。我们将从行动、拒绝、自我认知、实力提升等多个角度,…...

【DeepSeek】5分钟快速实现本地化部署教程
一、快捷部署 (1)下载ds大模型安装助手,下载后直接点击快速安装即可。 https://file-cdn-deepseek.fanqiesoft.cn/deepseek/deepseek_28348_st.exe (2)打开软件,点击立即激活 (3)选…...

算法之二维装水问题
目录 1. 题目2. 解释3. 思路4. 代码5. 总结 1. 题目 给定一个数组arr,已知其中所有的值都是非负的,将这个数组看作一个容器,请返回容器能装多少水 比如,arr {3,1,2,5,2,…...

[C语言日寄] 字符串操作函数的使用及其拓展
【作者主页】siy2333 【专栏介绍】⌈c语言日寄⌋:这是一个专注于C语言刷题的专栏,精选题目,搭配详细题解、拓展算法。从基础语法到复杂算法,题目涉及的知识点全面覆盖,助力你系统提升。无论你是初学者,还是…...

用Python的Pandas库解锁数据科学:从入门到实战
用Python的Pandas库解锁数据科学:从入门到实战 引言 Python的Pandas库(名称源自"Panel Data")作为数据科学生态系统的基石,凭借其强大的数据结构和灵活的操作功能,已成为全球超过90%数据工作者的首选工具。…...

利率债、信用债、可转债区别与优势
利率债、信用债、城投债和可转债是债券市场的主要品种,它们在发行主体、风险收益特征和投资优势上各有不同。以下是它们的区别和优势: 1. 利率债 定义:利率债是由政府或政府支持的机构发行的债券,主要包括国债、政策性金融债&…...

12、Vue 生命周期各阶段及任务
Vue 2 生命周期各阶段及任务 创建阶段 beforeCreate 此时实例刚刚初始化,数据观测(data)和 event/watcher 事件配置还未开始。通常在此阶段无法访问 data 中的数据和 methods 中的方法。可以进行一些与 Vue 实例无关的全局初始化操作&#x…...

AI进化太快,建立完善的AI理论迫在眉睫
如今的AI用日新月异来形容都毫不夸张。DeepSeek的热度还没降,Manus 又火了。随着AI越来越强大且进化速度越来越快,建立完善的AI理论迫在眉睫。 虽然AI是人类创造的,但是我们其实没有完全理解其原理。深度学习本质上还是一个黑盒,…...

MATLAB程序介绍,三维环境下的IMM(交互式多模型),使用CV和CT模型,EKF作为滤波
本文所述的MATLAB代码为三维的交互式多模型(IMM)滤波器,结合了匀速直线运动(CV模型)和匀速圆周运动(CT模型)的状态估计。使用扩展卡尔曼滤波(EKF)来处理状态更新与观测数…...