Ubuntu20.04本地配置IsaacLab 4.5.0的训练环境(一)
Ubuntu20.04本地配置IsaacLab 4.5.0的训练环境(一)
- 配置conda虚拟环境(对于这一步,个人感觉跟在配置IsaacLab那一节的./isaaclab.sh --install同样要执行这一步,建议先不执行)
- 配置IsaacSim
- 配置IsaacLab
写在前面,听说IsaacLab 4.2.0有BUG,所以装个4.5.0试试。基本安装步骤和4.2.0一致。
写在前面,需要约200G的空间(因为存在资产包压缩包的下载与解压,同时存在可能会要很大的空间,但实际上用上的只是解压后的文件),如果空间不够的可能需要考虑后面在下载资产包的时候少下载一些,但是只下载部分资产包是否有用无法确定。
写在前面,后续所有的安装,比如conda虚拟环境名称等,你都可以自己指定,并不一定要跟我一样。但要注意相应路径需要修改。
写在前面,下述的安装主要是为了强化学习使用,若只是使用IsaacLab平台,但不一定使用强化学习,不必全部按照下面方式安装。
配置conda虚拟环境(对于这一步,个人感觉跟在配置IsaacLab那一节的./isaaclab.sh --install同样要执行这一步,建议先不执行)
首先确认python版本,torch版本及其cuda版本。对于IsaacLab 4.5.0,需要python3.10,torch2.5.1,而torch2.5.1对应的cuda版本有几个,这可通过pytorch官网确认。

由于本人之前在安装4.2.0时已经配置了cuda12.1,在此直接安装匹配cuda12.1的torch。
启动终端,执行:
conda create -n isaaclab_4_5_0 python=3.10
conda activate isaaclab_4_5_0
conda install pytorch==2.5.1 torchvision==0.20.1 torchaudio==2.5.1 pytorch-cuda=12.1 -c pytorch -c nvidia # 安装pytorch2.5.1
配置IsaacSim
从官网下载IsaacSim 4.5.0安装包(Latest Release中选择4.5.0版本,Linux版本):

在**./local/share/ov/pkg/目录下创建文件夹isaac-sim-4.5.0**,将安装包解压至该文件夹内。

在该文件夹下启动终端,执行:
# 若不是在./local/share/ov/pkg文件夹下isaac-sim-4.5.0中进行文件解压,还需执行一步./post_install.sh
./isaac-sim.selector.sh
出现如下GUI界面(第一次运行可能会出现报错,点击确定即可,对后续使用并没有影响):

点击SATRT即启动IsaacSim,第一次启动会比较慢,等候即可。(Streaming表示不显示界面)
另一种启动方法则是直接在终端中运行:
./isaac-sim.sh
设置环境变量,在终端中执行(或直接鼠标打开):
gedit ~/.bashrc
加入指令:
export ISAACSIM_PATH="${HOME}/.local/share/ov/pkg/isaac-sim-4.5.0" # 这里请跟你解压的路径对应
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"
配置IsaacLab
从官网下载IsaacSim Assets,版本4.5.0,三个资产包,若空间足够可全部下载。
在任意位置创建文件夹(比如我则是在home目录下创建了isaaclab文件夹,其中创建了4-5-0子文件夹,后续我都会以这个文件夹来说明,读者根据自己需求进行更改。)
将所有下载的资产包解压至同一文件夹内。
安装依赖:
sudo apt install cmake build-essential
cd ~/.local/share/ov/pkg/
git clone https://github.com/isaac-sim/IsaacLab.git # 一定要拉去最新版的!旧版IsaacLab不适配!出现网络问题无法git clone的可以试试用镜像,git clone https://kkgithub.com/isaac-sim/IsaacLab.git或git clone https://githubfast.com/isaac-sim/IsaacLab.git
cd IsaacLab
gedit isaaclab.sh
在sh文件上方,命令“export ISAACLAB_PATH=“ ( c d " ( cd " (cd"( dirname “${BASH_SOURCE[0]}” )” &> /dev/null && pwd )"”之前添加代码:
source ~/.local/share/ov/pkg/isaac-sim-4.5.0/setup_conda_env.sh
而后,关闭文件,在终端中执行:
source ~/.bashrc
ln -s ~/.local/share/ov/pkg/isaac-sim-4.5.0 _isaac_sim
# 对于下述指令,若没有安装虚拟环境,请执行
./isaaclab.sh --conda my_env # my_env实际上是创建的conda虚拟环境的名称,由读者自行指定,也可不指定,用默认名称isaaclab
# 随后执行
./isaaclab.sh --install # 执行这一步,请确保你已经在conda虚拟环境中
若出现如下报错:
ERROR: Could not find a version that satisfies the requirement rsl-rl (unavailable) (from omni-isaac-lab-tasks[all]) (from versions: none)
ERROR: No matching distribution found for rsl-rl (unavailable)
执行(确保你在conda虚拟环境中):
pip install "git+https://github.com/leggedrobotics/rsl_rl.git"
然后,启动isaaclab,第一次启动会比较费时,要几分钟:
./isaaclab.sh -s
成功后出现界面,顶部显示Isaac Sim Full 4.5.0。
而后,在./local/share/ov/pkg/isaac-sim-4.5.0/apps/isaacsim.exp.base.kit文件中添加(注意把其中的路径都修改为你自己的本地路径):
persistent.isaac.asset_root.default = "/home/<username>/isaacsim_assets/Assets/Isaac/4.5"
exts."isaacsim.asset.browser".folders = ["/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Robots","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/People","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/IsaacLab","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Props","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Environments","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Materials","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Samples","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Sensors",
]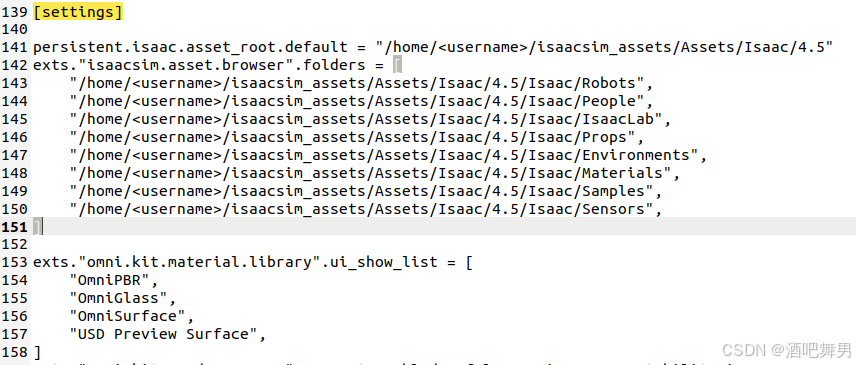在IsaacSim文件夹下执行:
./isaac-sim.sh --/persistent/isaac/asset_root/default="/home/<username>/isaacsim_assets/Assets/Isaac/4.5" # 这里的路径是你自己存放资产的本地路径
若运行过程中除了ROS2报错外无其它错误,点击如图所示的按钮,若显示路径为资产包路径,说明设置成功。
 随后,将IsaacLab文件夹下的
随后,将IsaacLab文件夹下的
NUCLEUS_ASSET_ROOT_DIR = carb.settings.get_settings().get("/persistent/isaac/asset_root/cloud")
修改为你自己的资产包路径:
NUCLEUS_ASSET_ROOT_DIR = "/home/<username>/isaacsim_assets/Assets/Isaac/4.5"

随后在IsaacLab文件夹下运行:
./isaaclab.sh -p scripts/demos/quadrupeds.py
出现如下界面:

相关文章:
Ubuntu20.04本地配置IsaacLab 4.5.0的训练环境(一)
Ubuntu20.04本地配置IsaacLab 4.5.0的训练环境(一) 配置conda虚拟环境(对于这一步,个人感觉跟在配置IsaacLab那一节的./isaaclab.sh --install同样要执行这一步,建议先不执行)配置IsaacSim配置IsaacLab 写在…...

第二次CCF-CSP认证(含C++源码)
第二次CCF-CSP认证 第一道(easy)思路及AC代码 第二道(easy)基本思路及AC代码 第三道(mid)基本思路及AC代码solution 1 (模拟)solution 2(KMP) 第一道(easy) 题…...
数据互串解决)
前端多角色权限页面(同浏览器同时登录)数据互串解决
项目是使用vue3写的 问题说明 现在的问题是,在同个浏览器打开两个标签页(都是登录页面),A标签页先登录A的账号,然后B标签页登录B账号。我的登录信息(userInfo和token、权限等都是存放在localStorage中的&…...

常见面试问题:MVC模式
MVC(Model-View-Controller)是一种分层架构设计模式,核心思想是通过职责分离提升代码的可维护性和扩展性。它的三个组件分工如下: 1. Model(模型) 职责:管理数据和业务逻辑,与数据库…...

【项目】视频点播
一、项目介绍 1. 对视频点播系统的认识 搭建视频共享点播服务器,可以让所有人通过浏览器访问服务器,实现视频的上传查看,以及管理并播放的功能。主要是完成服务器端的程序业务功能的实现以及前端访问界面 html 的编写,能够支持客…...

vue videojs使用canvas截取视频画面
前言 刚开始做的时候太多坑,导致一直报错: Uncaught (in promise) TypeError: Failed to execute ‘drawImage’ on ‘CanvasRenderingContext2D’: The provided value is not of type ‘(CSSImageValue or HTMLCanvasElement or HTMLImageElement or H…...

DeepSeek私有化部署6:openEuler 24.03-LTS-SP1安装Open WebUI
Open WebUI是一个 Open WebUI 是一个可扩展的、功能丰富、用户友好的自托管 AI 平台,专为完全离线运行而设计。 它支持多种 LLM 运行环境,包括 Ollama 和 OpenAI 兼容的 API,并内置了用于 RAG 的推理引擎,是一个强大的 AI 部署解决…...

uniapp+微信小程序+地图+传入多个标记点显示+点击打开内置地图导航+完整代码
一、效果展示 二、完整代码 <template><view class"container"><map class"map-container" :latitude"latitude" :longitude"longitude" :markers"markers" :controls"controls" show-location m…...

摄像头应用编程(四):ARM Linux LCD实时预览UVC摄像头画面
文章目录 1、前言2、环境介绍3、步骤4、应用程序编写4.1、lcd初始化4.2、摄像头初始化4.3、jpeg解码4.4、开启摄像头4.5、完整的程序如下 5、测试5.1、编译应用程序5.2、运行应用程序 6、总结 1、前言 本次应用程序主要针对支持MJPEG格式输出的UVC摄像头。 2、环境介绍 rk35…...
Linux下的c进程和java进程的通信-UnixSocket
1、开发c代码 引用的库 /usr/include c代码 #include <stdio.h> #include <stdlib.h> #include <string.h> #include <sys/socket.h> #include <sys/un.h> #include <unistd.h>#define SOCKET_PATH "/tmp/my_socket"int mai…...

单线程 Redis 如何实现高可用?深入图解主从复制与哨兵模式
单线程 Redis 如何实现高可用?深入解析主从复制与哨兵模式 一、主从模式:高可用的基石 主从模式是 Redis 实现高可用的基础架构,通过数据冗余和读写分离提升系统可靠性。其核心结构如下: 角色功能主节点唯一可写节点,…...

ubuntu 启动不起来,光标闪烁 解决方法
ubuntu 启动不起来,光标闪烁 进不了系统,解决方法 按ctrl alt f2,进入终端,登录。 jounal -b 查看启动日志。 发现是找不到显卡驱动程序。 解决方法: 卸载nvidia程序。 sudo systemctl stop gdm # 适用于GNOME…...

RV1126采集VI视频数据流
这节分享一下通过rkmedia的api获取RV1126的VI视频流,但是具体的已经在第一个推流项目已经说了。这里更多是回顾一下这部分的api。 采集vi数据实现 VI_CHN_ATTR_S,视频采集的VI模块。 int main() {int ret;VI_CHN_ATTR_S vi;vi.pcVideoNode CAMERA_PAH…...
命令详解:vi)
Linux(Centos 7.6)命令详解:vi
1.命令作用 vi/vim 是Linux 系统内置不可或缺的文本编辑命令,vim 是vi 的加强版本,兼容vi 的所有指令,不仅能编辑文本,而且还具有shell 程序编辑的功能,可以不同颜色的字体来辨别语法的正确性。 2.命令语法 usage: …...

音视频入门基础:RTP专题(15)——FFmpeg源码中,获取RTP的视频信息的实现
一、引言 通过FFmpeg命令可以获取到SDP文件描述的RTP流的视频压缩编码格式、色彩格式(像素格式)、分辨率、帧率信息: ffmpeg -protocol_whitelist "file,rtp,udp" -i XXX.sdp 本文以H.264为例讲述FFmpeg到底是从哪个地方获取到这…...

【2025小白版】计算复试/保研机试模板(个人总结非GPT生成)附代码
一、编程语言选择 很多高校在机试中对编程语言都有明确规定,像复旦大学计算机学院就说明可选择 C、C 或 Java 语言答题,还支持 C11(gcc5.4),C14(g5.4),Java (openjdk1.8)…...

Linux查看TP6 command定时任务并重启
TP6定时任务设置: 1、在项目根目录/app/command 目录下创建定时任务类文件MemberSubmit.php 使用 $this->setName(memberSubmit) 方法设置名称为 memberSubmit 的定时任务。 namespace app\command;use think\console\Command; use think\console\Input; use think\conso…...

系统运维分级掌握知识技能
以下是针对系统运维工程师的初中高三个等级的详细学习路线规划,结合理论知识与实践技能,帮助您逐步成长为专业运维人员: 初级阶段(入门基础) 目标:掌握运维基础工具与概念,能独立完成基础运维任…...
aardio - 虚表 —— 两个虚表之间互相拖动交换数据
插入到虚表末尾的方法: import win.ui; import godking.vlistEx; /*DSG{{*/ mainForm win.form(text"vlistEx - table adapter";right849;bottom578;border"thin") mainForm.add( radiobutton{cls"radiobutton";text"移动&qu…...

第一:goland安装
GOPROXY (会话临时性),长久的可以在配置文件中配置 go env -w GOPROXYhttps://goproxy.cn,direct 长久的,在~/.bashrc文件中添加: export GOPROXYhttps://goproxy.cn,direct -----…...
Dockerfile 深入浅出:从基础到进阶全解析
Dockerfile 深入浅出:从基础到进阶全解析 各位同学,大家好!欢迎来到今天的 Dockerfile 课程。Docker 技术在当今的软件开发和部署领域可以说是非常热门,而 Dockerfile 作为构建 Docker 镜像的关键文件,掌握它对于我们…...

Mybatis中的分页操作,如何使用PageHelper进行分页,以及Spring Boot整合Mybatis Plus分页
目的: 学会分页功能,学会分页方法 场景: 将下面的数据进行分页: 文章目录 Mybatis 单独使用分页(没有整合)1. PageHelper 插件 Spring Boot 整合 Mybatis Plus 使用分页1. selectPage 方法实现分页2. selec…...

python学习第三天
条件判断 条件判断使用if、elif和else关键字。它们用于根据条件执行不同的代码块。 # 条件判断 age 18 if age < 18:print("你还是个孩子!") elif age 18:print("永远十八岁!") else:print("你还年轻!")…...

CSS Overflow 属性详解
CSS Overflow 属性详解 在网页设计和开发中,CSS Overflow 属性是一个非常重要的特性,它决定了当内容超出其容器大小时应该如何处理。本文将详细介绍 CSS Overflow 属性的相关知识,包括其语法、作用、常用属性值以及一些实际应用场景。 1. CSS Overflow 属性概述 CSS Over…...

深度解析:视频软编码与硬编码的优劣对比
视频编码 一、基本原理与核心技术 压缩原理 通过时空冗余消除实现数据压缩: 空间冗余:利用帧内预测(如DC/角度预测)消除单帧内相邻像素相似性。时间冗余:运动估计与补偿技术(ME/MC)减少连续帧间…...

【网络安全】API安全防护完整指南
文章目录 API安全为什么 API 安全性重要?API 安全性与通用应用程序安全性的区别传统 Web 安全的主要特征API 安全的关键特征OWASP API 前 10 大安全威胁API1:2019 - 破坏对象级授权(Broken Object-Level Authorization)API2:2019 - 破坏用户身份验证(Broken User Authentic…...

Docker 学习(四)——Dockerfile 创建镜像
Dockerfile是一个文本格式的配置文件,其内包含了一条条的指令(Instruction),每一条指令构建一层,因此每一条指令的内容,就是描述该层应当如何构建。有了Dockerfile,当我们需要定制自己额外的需求时,只需在D…...

本地部署 DeepSeek:从 Ollama 配置到 Spring Boot 集成
前言 随着人工智能技术的迅猛发展,越来越多的开发者希望在本地环境中部署和调用 AI 模型,以满足特定的业务需求。本文将详细介绍如何在本地环境中使用 Ollama 配置 DeepSeek 模型,并在 IntelliJ IDEA 中创建一个 Spring Boot 项目来调用该模型…...

算法之 前缀和
文章目录 前缀和基础3427.变长子数组求和 前缀和与哈希表1524.和为奇数的子数组数目 距离和1685.有序数组中绝对值之和 前缀异或和1177.构建回文串检测 其他一维前缀和1310.子数组异或查询 二维前缀和1314.矩阵区域和 前缀和,就是定义pre[i] 为nums的前i个元素的和值…...

第4章 Function 语意学1: Member的各种调用方式
一、Nonstatic member functions C 的设计准则之一就是:nonstatic member function 至少必须和一般的nonmember function 有相同的效率。也就是说,如果我们要在以下两个函数之间作选择: float magnitude3d( const Point3d * this ) { ... } float Point3d::magnit…...