视觉与激光点云 融合的 三维重建算法
以下是一些结合激光点云(LiDAR)与其他数据(如图像、RGB-D等)的三维重建算法,这类方法通过融合多模态数据提升重建的精度和完整性:
1. 传统几何融合方法
(1) LiDAR + 相机(RGB/LiDAR Fusion)
- 核心思想:利用LiDAR的高精度几何信息与相机的丰富纹理,通过标定对齐实现融合。
- 典型算法:
- LOAM(Lidar Odometry and Mapping)
- 纯LiDAR的SLAM算法,但常与视觉里程计(如VINS-Fusion)结合使用。
- LIO-SAM(LiDAR-Inertial Odometry via Smoothing and Mapping)
- 结合LiDAR、IMU和GPS,支持大场景高精度建图。
- FAST-LIO2
- 基于紧耦合的LiDAR-IMU融合,实现实时高频率建图。
- LOAM(Lidar Odometry and Mapping)
- 优势:几何精度高(厘米级),适合自动驾驶、无人机测绘。
- 工具:ROS中的
lidar_camera_calibration标定工具。
(2) LiDAR + RGB-D传感器
- 方法:将LiDAR点云与RGB-D相机(如Kinect、RealSense)的深度图融合。
- 应用:
- ElasticFusion:动态场景重建,结合RGB-D与LiDAR优化全局一致性。
- Kintinuous:实时稠密重建,支持大规模环境。
2. 深度学习多模态融合
(1) 基于点云与图像的跨模态特征融合
- PointFusion(2018)
- 将LiDAR点云与RGB图像输入双分支网络,预测3D目标检测框。
- 论文:PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation.
- Frustum PointNet(2018)
- 利用图像检测结果(2D框)裁剪LiDAR点云区域,再通过PointNet预测3D框。
- 应用:自动驾驶中的目标检测。
(2) 端到端融合重建
- Lidar-RGBD Fusion Network(2021)
- 输入LiDAR稀疏点云与RGB-D图像,生成稠密且带纹理的3D模型。
- 网络结构:使用3D CNN融合多模态特征。
- PIFusion(2022)
- 结合LiDAR点云与单目深度估计,通过迭代优化提升重建细节。
- 优势:在无纹理区域补充几何信息。
(3) 激光点云补全与增强
- PCN(Point Completion Network)
- 输入不完整的LiDAR点云,生成完整点云。
- 改进版:与图像语义分割结合(如PCN+Mask R-CNN)。
- PointAugment(2020)
- 通过对抗生成网络(GAN)增强点云细节,结合图像纹理生成逼真表面。
3. 工业级融合方案
(1) 无人机LiDAR+倾斜摄影
- ContextCapture(Bentley公司)
- 融合无人机LiDAR点云与多视角航拍图像,生成高精度数字表面模型(DSM)。
- Pix4D
- 支持LiDAR点云与RGB图像联合处理,输出带纹理的网格模型。
(2) 自动驾驶多传感器融合
- HD Map Reconstruction
- 高精地图重建中,LiDAR提供几何框架,摄像头补充车道线、交通标志等语义信息。
- 工具链:Apollo(百度)、Autoware(开源)。
4. 开源工具与框架
- Open3D
- 支持LiDAR点云与RGB图像配准、融合及表面重建(如泊松重建)。
- PCL(Point Cloud Library)
- 提供点云滤波、配准、分割等功能,可自定义多模态融合流程。
- PDAL(Point Data Abstraction Library)
- 处理大规模LiDAR数据,支持与GIS系统集成。
挑战与解决方案
- 标定问题:LiDAR与相机的外参标定误差直接影响融合效果。
- 解决方案:使用标定板(如棋盘格)进行联合标定,或在线标定算法(如
lidar_camera_calibration)。
- 解决方案:使用标定板(如棋盘格)进行联合标定,或在线标定算法(如
- 数据异步性:传感器数据时间戳不同步导致融合误差。
- 解决方案:硬件同步(如PTP协议),或通过插值对齐时间戳。
- 点云稀疏性:远距离LiDAR点云稀疏,难以重建细节。
- 解决方案:结合单目深度估计(如MiDaS)或立体视觉补充细节。
效果对比
| 方法 | 数据需求 | 精度 | 纹理细节 | 适用场景 |
|---|---|---|---|---|
| 纯LiDAR重建 | 激光点云 | 高(厘米级) | 无纹理 | 地形测绘、结构检测 |
| LiDAR+RGB融合(传统) | LiDAR+多视角图像 | 高 | 中等 | 建筑BIM、文化遗产数字化 |
| LiDAR+深度学习 | LiDAR+单目/多目图像 | 中高 | 高 | 自动驾驶、机器人导航 |
| 工业级工具链 | LiDAR+航拍图像 | 极高 | 高 | 城市级数字孪生 |
典型应用场景
- 自动驾驶:高精地图重建(LiDAR+相机+IMU)。
- 数字孪生:城市建模(无人机LiDAR+倾斜摄影)。
- 工业检测:管道、桥梁的缺陷检测(LiDAR+热成像)。
- 考古与文化遗产:古迹数字化(LiDAR+多光谱图像)。
最新研究进展(2023)
- NeRF-LiDAR Fusion
- 将NeRF的隐式表示与LiDAR点云结合,提升室外大场景重建质量(如Urban-NeRF)。
- Transformer-based Fusion
- 使用Transformer网络融合点云与图像特征(如Point-BERT + ViT)。
- 自监督融合学习
- 无需标定数据,通过跨模态对比学习实现对齐(如CrossModal-PointContrast)。
总结
- 若需高精度几何重建:优先选择传统LiDAR+相机融合方案(如LIO-SAM + ContextCapture)。
- 若需纹理丰富的模型:结合深度学习(如PIFusion)或工业工具(Pix4D)。
- 动态或大场景:考虑NeRF-LiDAR混合方法(如Block-NeRF + LiDAR)。
激光点云融合的核心价值在于几何精度与纹理细节的互补,实际应用中需根据场景需求(精度、速度、成本)选择合适的融合策略。
相关文章:

视觉与激光点云 融合的 三维重建算法
以下是一些结合激光点云(LiDAR)与其他数据(如图像、RGB-D等)的三维重建算法,这类方法通过融合多模态数据提升重建的精度和完整性: 1. 传统几何融合方法 (1) LiDAR 相机(RGB/LiDAR Fusion…...

Linux上位机开发实践(超越MPP去开发产品)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 对于芯片厂商来说,肯定希望客户的应用和自己的芯片绑定地越紧密越好。最好就是,他们自己成为客户的独家供应商。但是对于嵌…...

雪花算法生成的主键存在哪些问题,为什么不能使用自增ID或者UUID做MySQL的主键
MySQL 分布式架构中的主键选择:自增ID、UUID与雪花算法 为什么MySQL分布式架构中不能使用自增主键? 在分布式架构中,自增主键存在以下问题: 主键冲突风险:多个数据库实例同时生成自增主键会导致ID重复分片不均匀&am…...
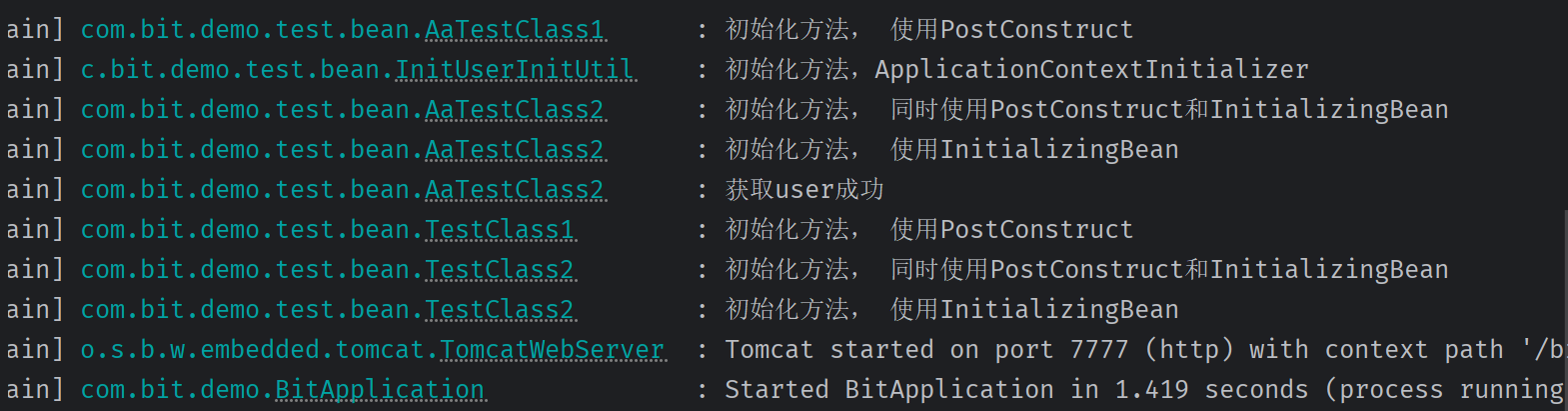
SpringBean模块(二)bean初始化(2)和容器初始化顺序的比较--引入ApplicationContextInitializer
前面介绍了获取容器可以让spring bean实现ApplicationContextAware,实际也是初始化执行了setApplicationContext接口, 初始化接口还可以借助一些注解或者spring bean的初始化方法,那么他们的执行顺序是什么样的呢? 一、验证&…...

【分享】内外网文件摆渡系统:让数据传输更安全更可靠
【分享】Ftrans内外网文件摆渡系统:让数据传输更安全更可靠! 随着大数据时代的到来,数据的重要性日渐得到重视,数据作为数字经济时代下的基础性资源和战略性资源,是决定国家经济发展水平和竞争力的核心驱动力。以行业…...

2025年江苏省职业院校技能大赛 (高职组)大数据应用开发赛项任务书 (样题)
2025年江苏省职业院校技能大赛 (高职组)大数据应用开发赛项任务书 (样题) 背景描述:任务A:离线数据处理(35分)子任务一:数据抽取子任务三:指标计算 任务B&…...

前端学习记录之HTML
1. 网页 1.1 什么是网页 网站是指在因特网上根据一定的规则,使用HTML等制作的用于展示特定内容相关的网页集合。 网页是网站中的一“页”,通常是HTML格式的文件,它要通过浏览器来阅读 网页是构成网站的基本元素。它通常由图片,…...

解释一下Unity碰撞的触发条件
Unity中碰撞的触发条件主要与物体的碰撞体(Collider)和刚体(Rigidbody)组件有关。具体来说,Unity的物理引擎会根据物体的配置来检测碰撞(Collision)和触发器(Trigger)事件…...
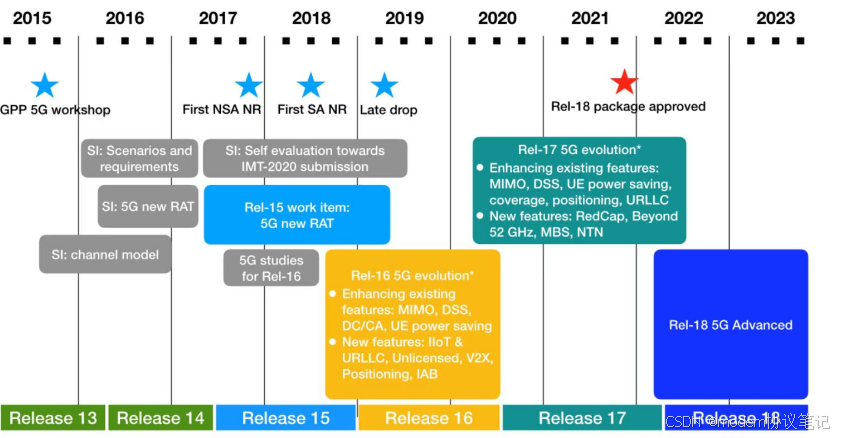
手机显示5GA图标的条件
最近有星友问在什么情况下才能显示5G-A?虽然这个我也不知道,但是我有几个运营商的5G终端白皮书,从上面就可以找到答案。 如上是几个运营商显示5G-A的条件,基本上考虑的都是3CC的情况,联通还有考虑200M CA 2CC的场景&am…...
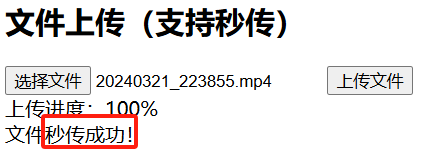
Spring Boot 实现文件秒传功能
前言 在开发Web应用时,文件上传是一个常见需求。然而,当用户需要上传大文件或相同文件多次时,会造成带宽浪费和服务器存储冗余。此时可以使用文件秒传技术通过识别重复文件,实现瞬间完成上传的效果,大大提升了用户体验…...
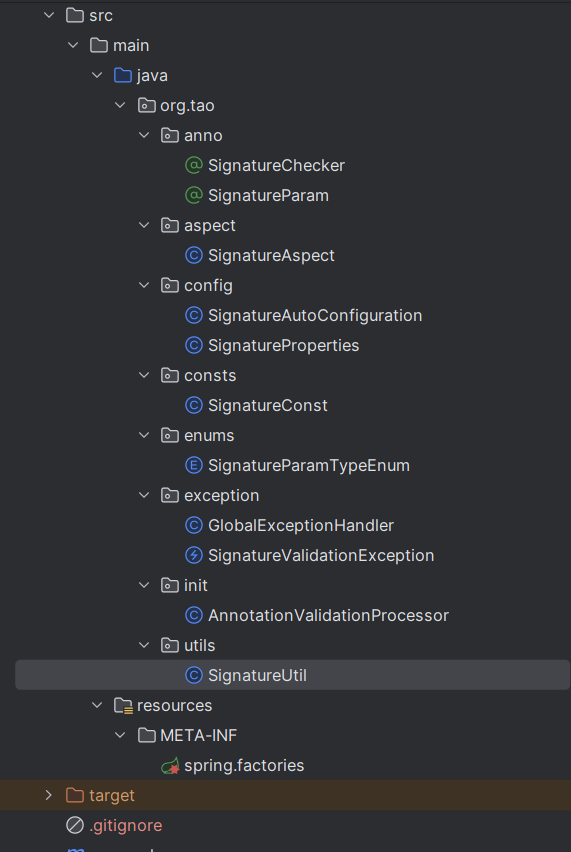
使用AOP技术实现Java通用接口验签工具
一、背景 在给第三方提供接口时,我们需要对接口进行验签。具体来说,当外部系统调用我们的接口时,请求中需要携带一个签名,我们接收到请求后,会解析数据并校验签名是否正确,以确保请求的合法性和安全性。 为了在不同项目中方便地使用这一功能,我们将签名校验规则封装成一…...

Foldseek快速蛋白质结构比对
1. 下载和安装 Foldseek 如果只是单个蛋白质结构的序列比对,我们只需要用Foldseek 的网站服务 https://search.foldseek.com/search 上传我们的蛋白质结构并选择想要进行比对的数据库即可,这里不做重点讲解。做生物信息学研究,我们难免需要批…...

JAVA设计模式之适配器模式《太白金星有点烦》
太白金星握着月光凝成的鼠标,第108次检查南天门服务器的运行日志。这个刚从天枢院调来的三等仙官,此刻正盯着瑶池主机房里的青铜鼎发愁——鼎身上"天地同寿"的云纹间,漂浮着三界香火系统每分钟吞吐的十万条功德数据。看着居高不下的…...

w2ui 水平滚动移动 虚拟列 数据丢失
https://w2ui.com/web/docs/1.5/w2grid.disableCVS https://github.com/vitmalina/w2ui/issues/1398 解决方案来源 问题现象: 窗口缩小 导致多列 出现水平滚动,滚动时触发本地样式重绘,导致record undefined,从而引发多列报错 解决方案: 使用 disableCVS : true 一次加载到d…...

aarch64-none-elf-gcc与aarch64-linux-gnu-gcc
1. 场景描述 在Ubuntu 24.04.1 LTS x86_64架构下交叉编译能跑在aarch64架构下裸机程序,遇到缺aarch64-none-elf-gcc的情况,做此记录。 2. aarch64-none-elf-gcc与aarch64-linux-gnu-gcc 运行环境 aarch64-none-elf-gcc 生成的代码是 裸机程序…...
:慢查询定位及索引、B树相关知识详解)
MySQL篇(一):慢查询定位及索引、B树相关知识详解
MySQL篇(一):慢查询定位及索引、B树相关知识详解 MySQL篇(一):慢查询定位及索引、B树相关知识详解一、MySQL中慢查询的定位(一)慢查询日志的开启(二)慢查询日…...

【清华大学】DeepSeek政务应用场景与解决方案
目录 一、政务数字化转型三阶段演进二、人工智能政务应用场景四大方向 三、技术方案核心技术 四、解决方案案例1. 公文写作2. 合同协议智能审查3. 行政执法4. 就业指导 五、风险及对策六、落地大四步法七、未来发展展望AI职业替代逻辑空间智能与具身智能人机共生 一、政务数字化…...
4.2 单相机引导机器人放料-仅考虑角度变化
【案例说明】 本案例产品在托盘中,角度变化不大(<15度);抓取没有问题,只是放的穴位只能容许3度的角度偏差,因此需要测量产品的角度。 思路是:机器人抓料后、去固定拍照位拍照(找到与标准照片的角度偏差),机器人在放料的位置上多旋转这个角度偏差,把产品放进去。 …...

洛谷题单1-P5704 【深基2.例6】字母转换-python-流程图重构
题目描述 输入一个小写字母,输出其对应的大写字母。例如输入 q[回车] 时,会输出 Q。 输入格式 无 输出格式 无 输入输出样例 输入 q输出 Q方式-upper() 代码 class Solution:staticmethoddef oi_input():"""从标准输入读取数据…...

论文阅读笔记:Denoising Diffusion Implicit Models (3)
0、快速访问 论文阅读笔记:Denoising Diffusion Implicit Models (1) 论文阅读笔记:Denoising Diffusion Implicit Models (2) 论文阅读笔记:Denoising Diffusion Implicit Models (…...

Git(八)如何在同一台电脑登录两个Git
目录 一、理解 SSH 密钥机制二、具体实现步骤1.删除GIT全局配置2.生成多个 SSH 密钥3.添加公钥到 Git 账户4.配置 SSH config 文件5.测试SSH key是否生效6.下载代码 三、Git仓库级别配置四、HTTPS方式的多账号管理 引言: 在日常开发中,我们经常会遇到需要…...

FPGA学习-基于 DE2-115 板的 Verilog 分秒计数器设计与按键功能实现
一、核心功能设计 按键暂停/继续:通过KEY1控制计时状态 按键消抖处理:20ms消抖周期消除机械抖动 硬件资源分配:符合DE2-115开发板引脚规范 二、核心模块实现详解 1. 顶层模块(counter) module counter(input CL…...
如何改电脑网络ip地址:一步步指导
有时我们需要更改电脑的网络IP地址以满足特定的网络需求。本文将为您提供一份详细的步骤指南,帮助您轻松完成电脑网络IP地址的更改。以下是更改计算机IP地址的分步指南,适用于常见的操作系统: 一、更换内网ip Windows 系统(Win10…...

PyTorch 分布式训练(Distributed Data Parallel, DDP)简介
PyTorch 分布式训练(Distributed Data Parallel, DDP) 一、DDP 核心概念 torch.nn.parallel.DistributedDataParallel 1. DDP 是什么? Distributed Data Parallel (DDP) 是 PyTorch 提供的分布式训练接口,DistributedDataPara…...

prism WPF 消息的订阅或发布
prism WPF 消息的订阅或发布 EventMessage using Prism.Events; using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading.Tasks;namespace Cjh.PrismWpf {/// <summary>/// 事件消息/// </summary>publ…...

【Unity】记录TMPro使用过程踩的一些坑
1、打包到webgl无法输入中文,编辑器模式可以,但是webgl不行,试过网上的脚本,还是不行 解决方法:暂时没找到 2、针对字体asset是中文时,overflow的效果模式处理奇怪,它会出现除了overflow模式以…...

计算机视觉初步(环境搭建)
1.anaconda 建议安装在D盘,官网正常安装即可,一般可以安装windows版本 安装成功后,可以在电脑应用里找到: 2.创建虚拟环境 打开anaconda prompt, 可以用conda env list 查看现有的环境,一般打开默认bas…...

【go】异常处理panic和recover
panic 和 recover 当然能触发程序宕机退出的,也可以是我们自己,比如经过检查判断,当前环境无法达到我们程序进行的预期条件时(比如一个服务指定监听端口被其他程序占用),可以手动触发 panic,让…...

Sentinel[超详细讲解]-3
主要讲解🚀 - 基于QPS/并发数的流量控制 1、流控规则 流量控制(Flow Control)用于限制某个资源的访问频率,防止系统被瞬时的流量高峰冲垮。流量控制规则可以针对不同的资源进行配置,例如接口、方法、类等。 流量规则的…...

【云原生】Kubernetes CEL 速查表
以下是一份 Kubernetes CEL 速查表(Cheat Sheet),涵盖了常见的语法、宏、标准函数和一些在 Kubernetes 中常见的使用示例。可在编写或调试 CEL 表达式时用作快速参考。 1. 基础概念 概念说明语言特点无副作用、逐渐类型化(Gradua…...