【TI MSPM0】ADC DAC学习
一、样例展示
通过ADC0触发单次采样,如果采样结果大于0.5倍的VDD,就点亮LED 否则熄灭LED

编译加载运行这个历程,提供一个电压到A0_2引脚上,电压范围在0-VCC之间同时观察LED1.在上电后,默认将ADC配置到正确的引脚模式,因此没有必要调用这个函数来设置了

烧录之后观察现象,可以看到,现在的结果是led点亮,满足大于二分之一VDD的条件
#include "ti_msp_dl_config.h"volatile bool gCheckADC;//不要对变量进行编译优化
volatile uint16_t gAdcResult;int main(void)
{SYSCFG_DL_init();NVIC_EnableIRQ(ADC12_0_INST_INT_IRQN);gCheckADC = false;while (1) {DL_ADC12_startConversion(ADC12_0_INST);while (false == gCheckADC)//等待完成ADC转换{}//读取ADC的值gAdcResult = DL_ADC12_getMemResult(ADC12_0_INST, DL_ADC12_MEM_IDX_0);if (gAdcResult > 0x7ff) {DL_GPIO_clearPins(GPIO_LEDS_PORT, GPIO_LEDS_USER_LED_1_PIN);} else {DL_GPIO_setPins(GPIO_LEDS_PORT, GPIO_LEDS_USER_LED_1_PIN);}gCheckADC = false;DL_ADC12_enableConversions(ADC12_0_INST);//每一轮执行后会关闭掉,执行后需再次打开}
}void ADC12_0_INST_IRQHandler(void)
{switch (DL_ADC12_getPendingInterrupt(ADC12_0_INST)) {case DL_ADC12_IIDX_MEM0_RESULT_LOADED:gCheckADC = true;break;default:break;}
}
二、 syscfg 配置
1.名称 选择的外设
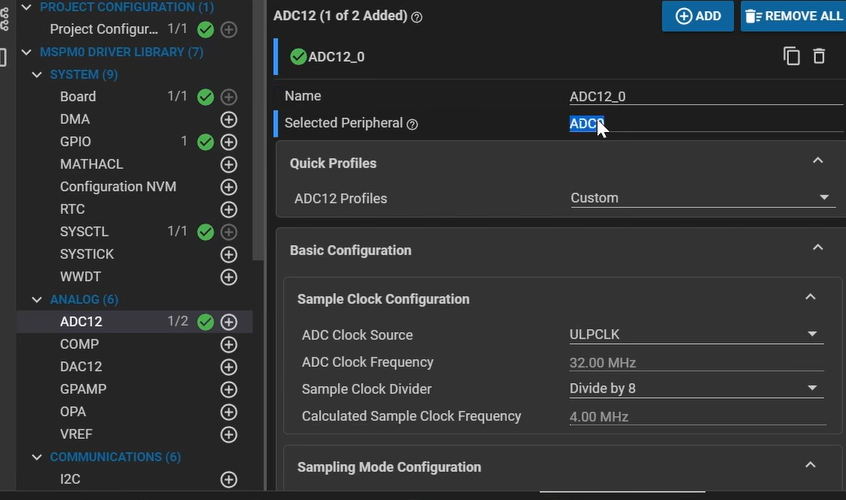
2. 基础设置
01 用32兆时钟,进行8分频
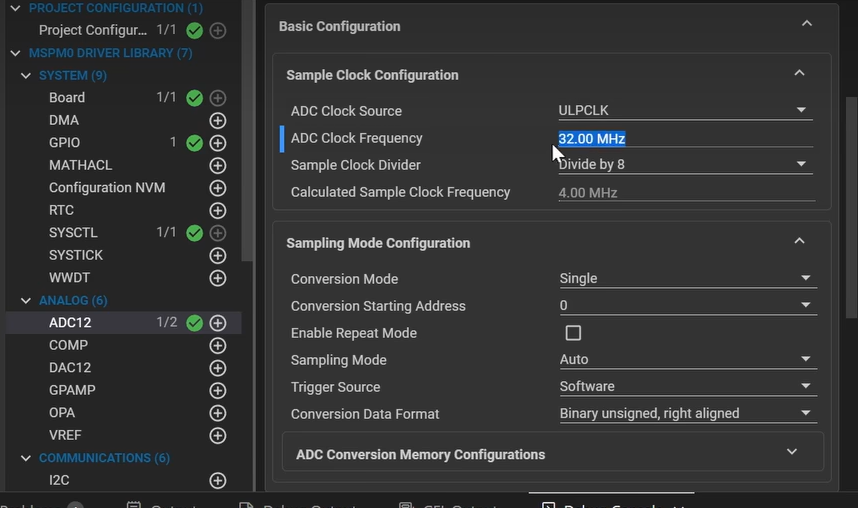
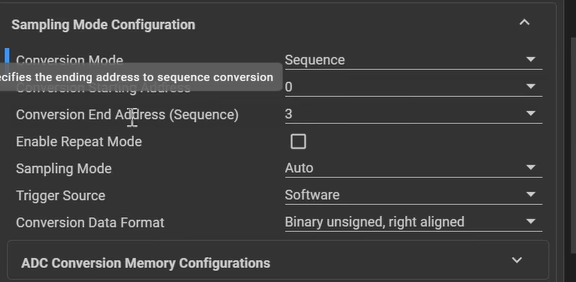
02 采样模式配置
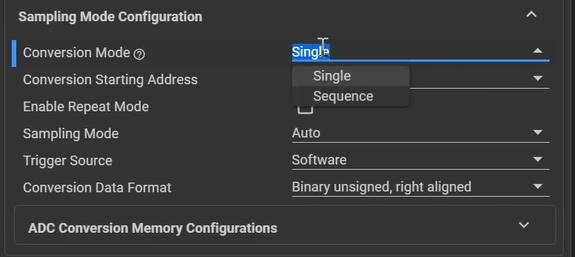
当前为 single 为单一转换,因为当前只测量了一个引脚的值
当需要进行多个通道的测量,就可以选用sequence
从哪里开始测量,当前为memory 0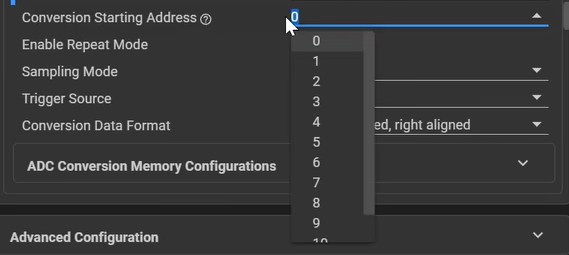
重复模式,不需要用
![]()
测量模式 自动和手动

自动模式的采样时间直接设置好的,通过sample timr0设置好后,自动控制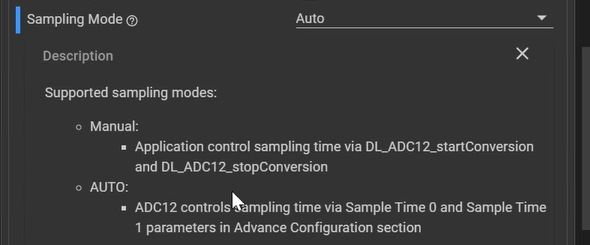
软件里进行转换,所以选择第一个,否则也可以进行事件驱动

转换的数据格式(当前为无符号二进制数)![]()
选择将结果保存到哪一个内存当中,共有12个内存,

关于内存空间的配置
channel和pin是关联的
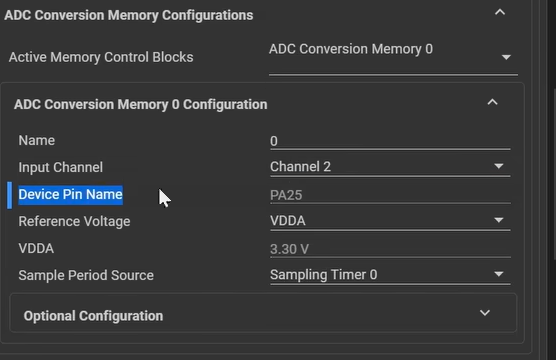
接下来查看手册 ,对这两个的关系进行查找
,对这两个的关系进行查找
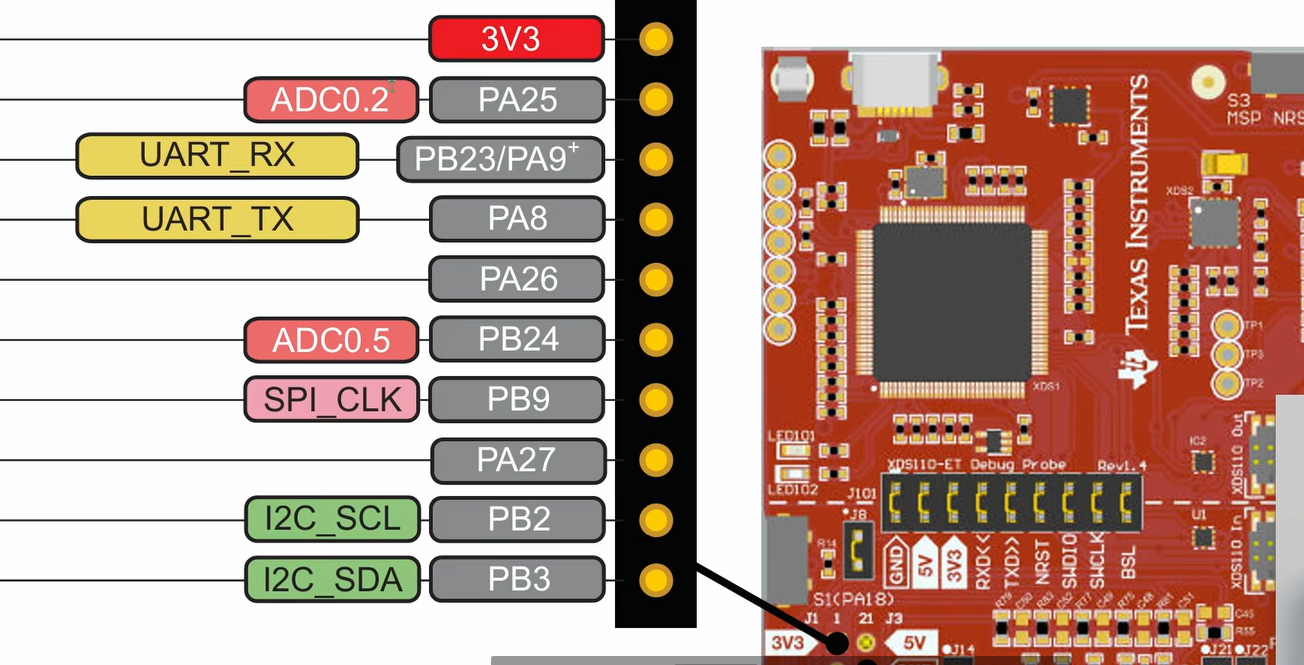
可以看到 ADC0.2对应就是PA25引脚
下面是选择参考电压为VDDA,VDDA是3.3v的电压,这样的话,输入电压范围就是0-3.3V

选择时钟源为timer 0,这个与上面的auto相关联

这个不需要去修改
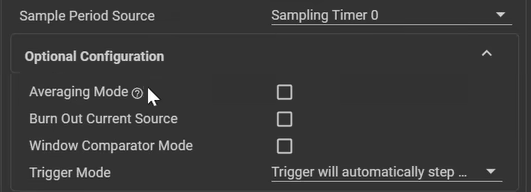
3.高级设置
本身加ADC12,就说明是12bit的精度,也就是说明,最终输出的数字是0-4095
![]()
fifo未启用
power down mode
选择手动或自动模式,这里选择手动模式,在这个模式下,用到sample time 0,设置采样时间,时间越长,结果越准

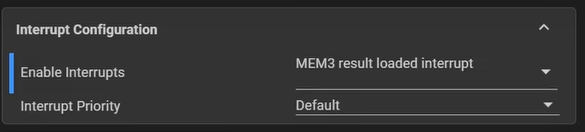
中断
测量流程:先开启测量,等待测量完成,测量完成后,将结果存到memory 0里面,存入后触发中断,触发中断就说明结果已经测量完成然后将标志位设置为true
所以要使能中断

DMA和EVENT不做配置,PIN保持默认

pin mux,可以选择是ADC0还是ADC1

三、空白模板自己编写
1、配置
添加ADC12
![]()
基础功能不需要修改,只需要改需要的引脚即可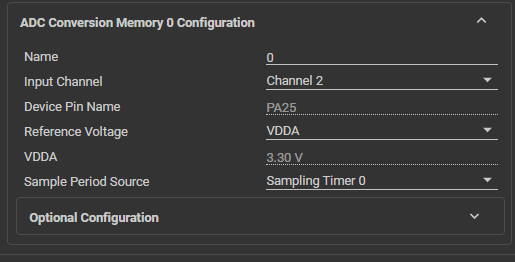
高级设置改为手动,配置为125us

中断设置为memory 0中断
2.代码编写
01使能中断ADC12_0_INST_INT_IRQN
找到中断函数名(编译后可打开.h文件)
NVIC_EnableIRQ(ADC12_0_INST_INT_IRQN);02编写中断服务函数
找到中断服务函数名(编译后可打开.h文件)

用到了Switch语句,通过这个函数获取最高优先级
DL_ADC12_getPendingInterrupt(ADC12_0_INST)这个函数有两个作用,一是判断找到最高优先级中断,二是清除最高优先级中断标志位标志位
查找数据手册
对应这一节
手册中说明,软件应用程序可以读取这个寄存器,来判断和清除(中断标志位)最高优先级的外设中断,读取会返回当前最高优先级的中断,这个读取同时也会清除RIS和MIS(最高优先级中断标志位)



3.完整代码
#include "ti_msp_dl_config.h"volatile bool ADC_Flag;//中断标志位
volatile uint16_t ADC_Val;//采样值int main(void)
{SYSCFG_DL_init();NVIC_EnableIRQ(ADC12_0_INST_INT_IRQN);while (1) {ADC_Flag=false ;DL_ADC12_startConversion(ADC12_0_INST);//开始采样变换while(ADC_Flag==false);//等待转换完成,如果退出,说明已经弄好了ADC_Val== DL_ADC12_getMemResult(ADC12_0_INST, DL_ADC12_MEM_IDX_0);//读取结果DL_ADC12_enableConversions(ADC12_0_INST);//再次使能中断,因为每次执行完就关闭了}
}void ADC12_0_INST_IRQHandler (void)
{switch (DL_ADC12_getPendingInterrupt(ADC12_0_INST)) {case DL_ADC12_IIDX_MEM0_RESULT_LOADED:ADC_Flag = true;break;default:break;}}4.查看结果
添加到watch窗口中

四、多路读取
1.样例工程 (序列转换)
 配置ADC0触发4路通道采集,并且保存到不同的buffer里面
配置ADC0触发4路通道采集,并且保存到不同的buffer里面
编译加载运行这个历程,提供一个0-VCC的电压到ADC通道上,浮空的引脚不保证是0
#include "ti_msp_dl_config.h"volatile bool gCheckADC;#define RESULT_SIZE (64)
volatile uint16_t gAdcResult0[RESULT_SIZE];
volatile uint16_t gAdcResult1[RESULT_SIZE];
volatile uint16_t gAdcResult2[RESULT_SIZE];
volatile uint16_t gAdcResult3[RESULT_SIZE];int main(void)
{/* Initialize peripherals and enable interrupts */SYSCFG_DL_init();NVIC_EnableIRQ(ADC12_0_INST_INT_IRQN);gCheckADC = false;uint16_t i = 0;while (1) {DL_ADC12_startConversion(ADC12_0_INST);/* Wait until all data channels have been loaded. */while (gCheckADC == false) {__WFE();}/* Store ADC Results into their respective buffer */gAdcResult0[i] =DL_ADC12_getMemResult(ADC12_0_INST, DL_ADC12_MEM_IDX_0);gAdcResult1[i] =DL_ADC12_getMemResult(ADC12_0_INST, DL_ADC12_MEM_IDX_1);gAdcResult2[i] =DL_ADC12_getMemResult(ADC12_0_INST, DL_ADC12_MEM_IDX_2);gAdcResult3[i] =DL_ADC12_getMemResult(ADC12_0_INST, DL_ADC12_MEM_IDX_3);i++;gCheckADC = false;/* Reset index of buffers, set breakpoint to check buffers. */if (i >= RESULT_SIZE) {__BKPT(0);i = 0;}else{;/*No action required*/}DL_ADC12_enableConversions(ADC12_0_INST);}
}/* Check for the last result to be loaded then change boolean */
void ADC12_0_INST_IRQHandler(void)
{switch (DL_ADC12_getPendingInterrupt(ADC12_0_INST)) {case DL_ADC12_IIDX_MEM3_RESULT_LOADED:gCheckADC = true;break;default:break;}
}
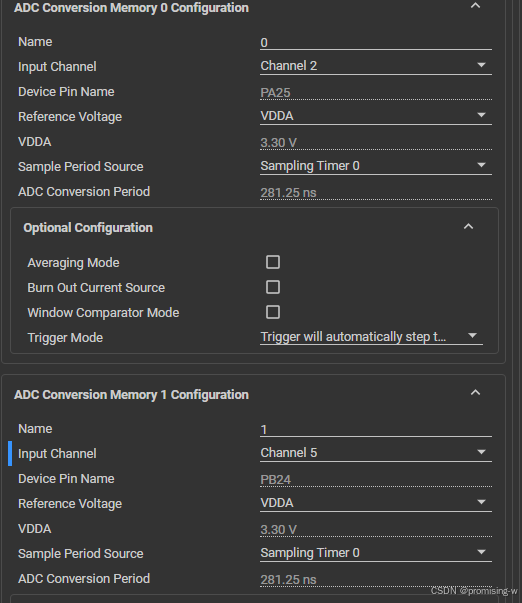
2.配置
sequence
end address 由于有4个内存空间

使能中断 因为到3结束,只需要使能到3就可以了
3.空白模版配置
添加ADC,更改模式为sequence,始末地址为 0 1,

配置两路的引脚
手动设置时间是40us
使能中断1

4.代码编写
定义中断标志位,定义变量接收采集的数据
volatile bool ADC_Flag;
volatile uint16_t ADC_Val1,ADC_Val2;使能中断
NVIC_EnableIRQ(ADC12_0_INST_INT_IRQN);设置中断标志位为false
ADC_Flag=false;开始转换,由于是对ADC0进行转换,启动一次就是序列转换,所以只写一次就行
DL_ADC12_startConversion(ADC12_0_INST);while循环等待转换
编写中断服务函数,在头文件去找
ADC12_0_INST_IRQHandler完整代码
#include "ti_msp_dl_config.h"
#include <stdbool.h>volatile bool ADC_Flag;
volatile uint16_t ADC_Val1,ADC_Val2;int main(void)
{SYSCFG_DL_init();NVIC_EnableIRQ(ADC12_0_INST_INT_IRQN);while (1) {ADC_Flag=false;DL_ADC12_startConversion(ADC12_0_INST);while (ADC_Flag==false); ADC_Val1 =DL_ADC12_getMemResult(ADC12_0_INST, DL_ADC12_MEM_IDX_0);ADC_Val2 =DL_ADC12_getMemResult(ADC12_0_INST, DL_ADC12_MEM_IDX_1);DL_ADC12_enableConversions(ADC12_0_INST);}
}
void ADC12_0_INST_IRQHandler(void)
{switch (DL_ADC12_getPendingInterrupt(ADC12_0_INST)) {case DL_ADC12_IIDX_MEM1_RESULT_LOADED:ADC_Flag = true;break;default:break;}}五、DAC的学习
1、配置
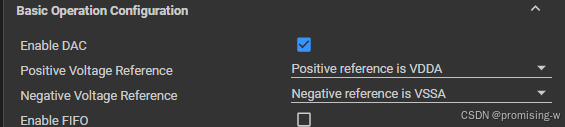
使能
最高和最低参考电压
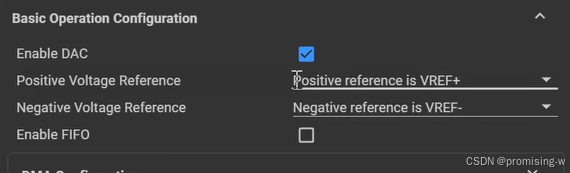
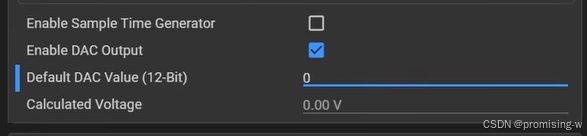
使能输出
默认值设置为0即可,因为上电后会手动配置
2.高级配置
可以选择12位还是8位的模式,12位就是到4095,8位是到255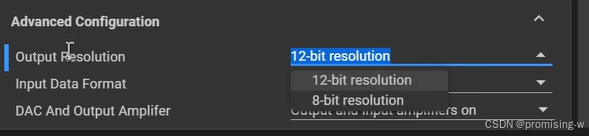
二进制输入,选择到on

3.空白模版编写
添加dac模块
使能MFPCLK时钟

设为默认
使能输出,默认值为0
这里只修改为on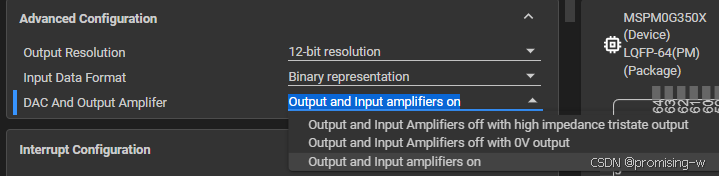
代码
#include "ti_msp_dl_config.h"int main(void)
{SYSCFG_DL_init();DL_DAC12_output12(DAC0, 4095);DL_DAC12_enable(DAC0);while (1) {}
}
相关文章:
【TI MSPM0】ADC DAC学习
一、样例展示 通过ADC0触发单次采样,如果采样结果大于0.5倍的VDD,就点亮LED 否则熄灭LED 编译加载运行这个历程,提供一个电压到A0_2引脚上,电压范围在0-VCC之间同时观察LED1.在上电后,默认将ADC配置到正确的引脚模式,…...
Cesium系列:从入门到实践,打造属于你的3D地球应用
一、Cesium简介 CesiumJS 是一个开源的 JavaScript 库,它能够帮助开发者创建出具有卓越性能、高精度、出色视觉质量和易用性的世界级 3D 地球仪和地图。无论是在航空航天领域,用于模拟飞行路径和展示卫星数据;还是在智能城市中,用…...

笔记1——数据通信网络基础
一、概述 数据通信网络:由路由器、交换机、防火墙、无线设备以终端构成的网络 功能:实现数据互通 二、网络设备 交换机: 特点:距离终端用户最近的设备 作用:终端接入、二层交换机 广播域:交换机连接的终端构成一个广播…...
Linux系统程序设计:从入门到高级Day01
知识点1 【系统调用】 系统调用的概述 系统调用:内核 提供给 用户 可以 操作内核 的一组函数接口 关系:用户 借助 系统调用 操作内核 进程的空间分为:内核空间 和 用户空间 用户一般都是在用户空间操作的,但是有的时候用户需要…...
openEuler24.03 LTS下安装HBase集群
前提条件 安装好Hadoop完全分布式集群,可参考:openEuler24.03 LTS下安装Hadoop3完全分布式 安装好ZooKeeper集群,可参考:openEuler24.03 LTS下安装ZooKeeper集群 HBase集群规划 node2node3node4MasterBackup MasterRegionServ…...

关于testng.xml无法找到类的问题
问题:testng.xml添加测试类的时候飘红 解决办法: 1.试图通过自动生成testng.xml插件去解决,感觉也不是这个问题,没有尝试; 2.以为是创建包的方式不对,重新删除后新建--还是找不到 想新建类的时候发现从m…...

数据结构:探秘AVL树
本节重点 理解AVL树的概念掌握AVL树正确的插入方法利用_parent指针正确更新平衡因子掌握并理解四种旋转方式:左单旋,右单旋,左右双旋,右左双旋 一、AVL树的概念 AVL树得名于它的发明者G. M. Adelson-Velsky和E. M. Landis&…...

Linux 入门:基础开发工具(上)vim,gcc/g++,make/makefile
目录 一.软件包管理器 一).软件包 二).安装软件 三).删除软件 二.编辑器vim 一).vim的基本介绍 1.正常/普通/命令模式(Normal mode) 2.插入模式(Insert mode) 3.底行模式(last line mode) 二).vim的基本操作 …...

计算机科学基础设施之数学:科研工具、资源与环境详介
李升伟 整理 数学科研涉及广泛的工具、资源和环境,涵盖从理论分析到数值模拟、从数据获取到论文发表的各个环节。以下是对数学科研中常用工具、资源和环境的详细介绍: 一、数学科研工具 1. 文献检索与管理工具 Google Scholar:全球最大的…...
)
Turtle事件处理(键盘与鼠标交互)
Turtle 提供了 事件驱动编程,允许我们使用 键盘 和 鼠标 控制 Turtle,从而实现交互式绘图。例如,我们可以让 Turtle 响应 按键、鼠标点击 和 拖动 事件,使其根据用户的输入进行移动、旋转或绘制图形。 1. 事件机制概述 Turtle 的事件处理主要依赖 turtle.Screen() 提供的 …...

5、无线通信基站的FPGA实现架构
基站(Base Station,BS),也称为公用移动通信基站,是无线电台站的一种形式,具体则指在一定的无线电覆盖区中,通过移动通信交换中心,与移动电话终端之间的信息传递的无线电收发信电台。…...

关于 UPDATE 语句 和 SELECT ... FOR UPDATE 的对比分析,包括语法、功能、锁机制、使用场景及示例代码
以下是关于 UPDATE 语句 和 SELECT ... FOR UPDATE 的对比分析,包括语法、功能、锁机制、使用场景及示例代码: 1. UPDATE 语句 功能 直接修改数据:立即更新表中的数据,并提交修改。无显式锁:虽然会自动加锁ÿ…...

Linux2 CD LL hostnamectl type mkdir dudo
查看主机名信息 设置静态主机名 同时配置静态、瞬时主机名 下载Vmware tools https://blog.csdn.net/qq_34638161/article/details/102779721 mkdir创建目录 问题:为什么在root目录下 看不到 /var /usr那些文件夹...

Docker容器部署Java项目的自动化脚本(Shell编写)
🤟致敬读者 🟩感谢阅读🟦笑口常开🟪生日快乐⬛早点睡觉 📘博主相关 🟧博主信息🟨博客首页🟫专栏推荐🟥活动信息 文章目录 Docker容器部署Java项目的自动化脚本&#x…...
期末不挂科纲要)
计组(蒋)期末不挂科纲要
2025.03.27:计算机组成原理期末不挂科速成纲要 计组期末不挂科速成纲要 第1章 概论第2章 数据的机器层次表示习题练习 第3章 指令系统习题练习 第4章 数值的机器运算习题练习 第5章 存储系统和结构习题练习 第6章 中央处理器习题练习 第7章 总线 第1章 概论 冯诺依曼…...
STM32F103C8T6单片机硬核原理篇:讨论GPIO的基本原理篇章1——只讨论我们的GPIO简单输入和输出
目录 前言 输出时的GPIO控制部分 标准库是如何操作寄存器完成GPIO驱动的初始化的? 问题1:如何掌握GPIO的编程细节——跟寄存器如何打交道 问题2:哪些寄存器,去哪里找呢? 问题三,寄存器的含义ÿ…...

UniApp集成极光推送详细教程
最近项目要集成推送服务,选型极光推送,记录一下开发过程。 1、极光官网注册登录 1.1选择极光推送产品,新建应用 1.2在下一步中选择Android/IOS的消息推送服务 1.3产品设置中输入应用包名(一经输入后不可更改,一定要正…...

探索Doris:日志分析的新宠,是否能取代老牌ES?
在大数据时代,日志存储与分析对于企业的运营和决策起着至关重要的作用。Elasticsearch(简称 ES)作为一款广泛应用的开源分布式搜索和分析引擎,长期以来在日志管理领域占据着举足轻重的地位。然而,随着技术的不断发展&a…...

HCIA/HCIP基础知识笔记汇总
HCIA/HCIP基础知识笔记汇总 ICT产业链: 上游:芯片制造、元器件生产、光纤光缆制造 中游:硬件组装、软件开发、网络建设维护 下游:电信服务、互联网服务、终端产品 VLAN端口类型: access :…...

AI战略群与星际之门:软银AI投资版图计划深度解析
一、星际之门:万亿美元级 AI 基础设施革命 1.1 项目背景与战略定位 在 AI 技术迅猛发展的今天,算力已成为推动其前进的核心动力。软银联合 OpenAI、甲骨文、英伟达、微软、arm推出的 “星际之门”(Stargate)计划,无疑是 AI 领域的一颗重磅炸弹。作为 AI 领域史上最大单笔…...

系统思考与时间管理
时间管理的真正秘诀:主动浪费时间? 巴菲特的私人飞机驾驶员觉得自己不够成功,于是向巴菲特请教应该怎么做。巴菲特让他列出了自己人生中最想实现的25个目标,并按重要程度排序,接着安排时间专注做前五件最重要的事情。…...
mac air m系列arm架构芯片安装虚拟机 UTM+debian 浏览器firefox和chrome
成果展示:debian虚拟机,你值得拥有! 预期结果 1、mac的m系列芯片,arm 架构且内存小,安装虚拟机。 考虑到mac m系列芯片8g内存,arm架构想安装一个轻量的虚拟机,偶然之间发现了debian,…...

大模预测法洛四联症的全方位研究报告
目录 一、引言 1.1 研究背景与意义 1.2 研究目的与创新点 二、法洛四联症概述 2.1 病理特征 2.2 临床表现 2.3 现有治疗手段 三、大模预测法洛四联症的原理与模型构建 3.1 大模预测基本原理 3.2 模型构建的数据收集与处理 3.3 模型训练与优化 四、术前风险预测与准…...

Keepalived+LVS+nginx高可用架构
注明:所有软件已经下载好,防火墙和SELinux已经全部关闭 一.搭建NFS 1.服务端 1.创建文件 [rootnfs ~]# mkdir -p /nfs/data 2、修改权限 [rootnfs ~]# chmod orw /nfs/data 3、写配置文件 [rootnfs ~]# cat /etc/exports /nfs/data 192.168.111.118(r…...
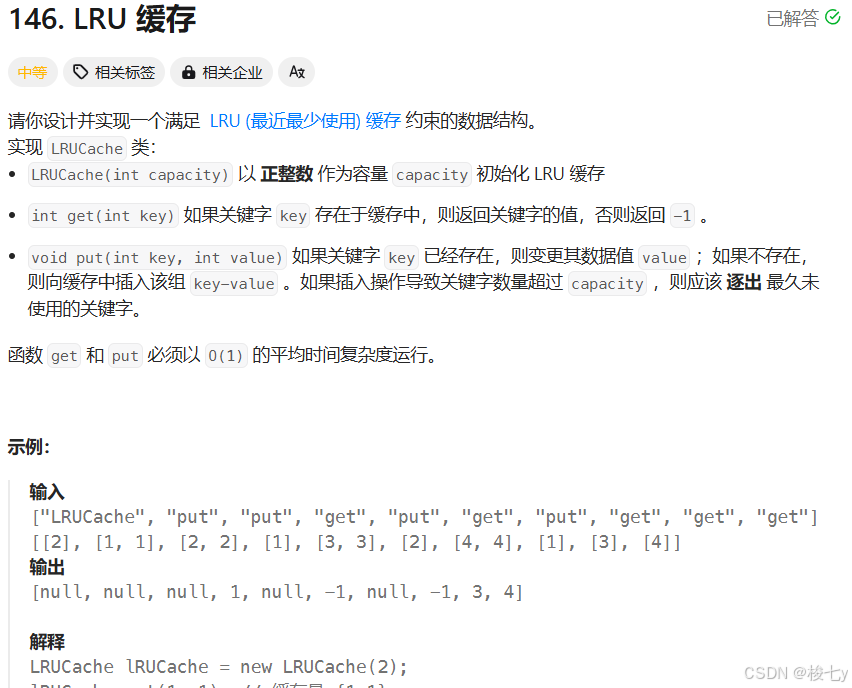
【力扣hot100题】(034)LRU缓存
做完这题已经没有任何力气写链表题了。 思路很简单,就是调试特别的痛苦。 老是频频报错,唉。 class LRUCache { public:struct ListNode{int key,val;ListNode* next; ListNode* prev;ListNode() : key(0), val(0), next(nullptr), prev(nullptr) {}L…...
【redis】缓存 更新策略(定期、实时生存),缓存预热、穿透、雪崩、击穿详解
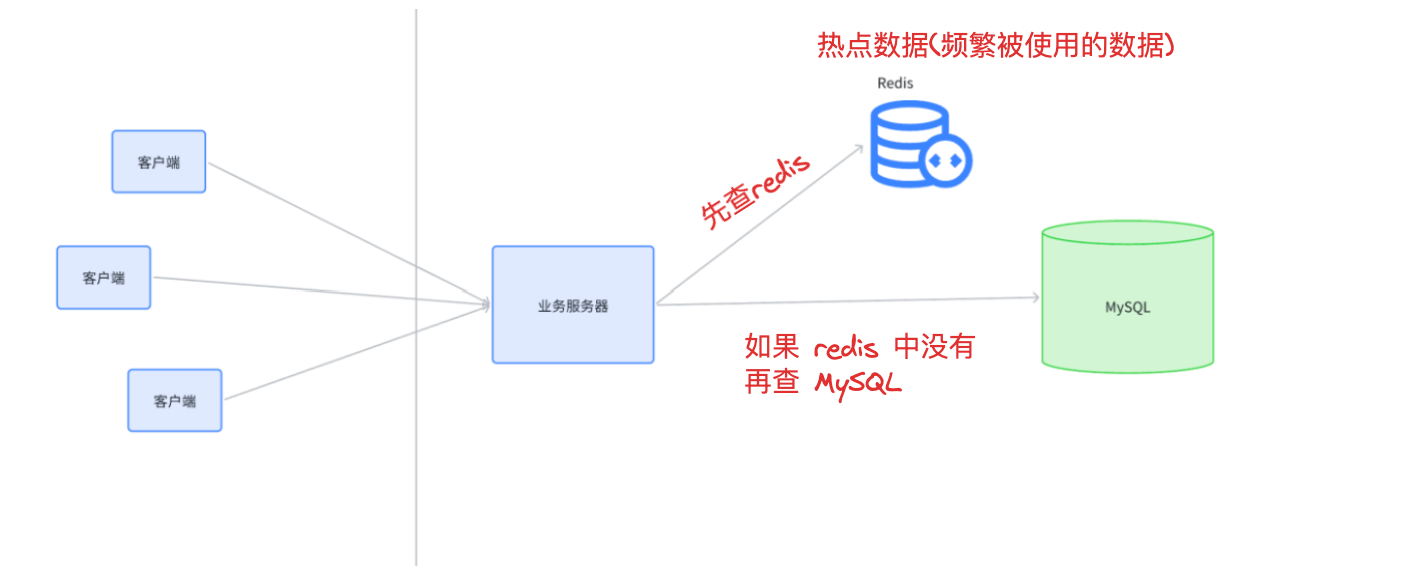
什么是缓存 redis 最常用的场景 核心思路就是把一些常用的数据,放到触手可及(访问速度更快)的地方 ⽐如我需要去⾼铁站坐⾼铁. 我们知道坐⾼铁是需要反复刷⾝份证的 (进⼊⾼铁站, 检票, 上⻋,乘⻋过程中, 出站…)正常来说, 我的⾝份证是放在…...

好文和技术网站记录
后续不断记录一些本人觉得的好文和一些技术网站 技术网站 Java 全栈知识体系 https://www.pdai.tech/ 文章 利用 NginxKeepalived 实现高可用技术 https://cloud.tencent.com/developer/article/1647182?policyId1004...

使用STM32CubeMX和Keil在STM32上创建并运行一个简单的FreeRTOS多任务程序
目标 利用FreeRTOS运行两个任务,分别为点灯和OLED屏的显示。 利用STM32CubeMX生成Keil工程和相关初始化代码 知识回顾 之前已经利用STM32CubeMX生成过Keil工程和相关初始化代码了,可以去回顾一下,详情见:https://blog.csdn.ne…...

从查重报告入手的精准论文降重秘籍
每个同学在使用论文查重时,为何同一篇文章,可能重复率从10%—30%不等?归根结底还是使用了不同查重系统。其实不同的论文查重与论文AIGC检测系统的算法、数据及模型都不一样,那如何针对这些系统的“个性”精准降重,这篇…...

车辆控制解决方案
车辆控制解决方案 /* * Purpose: 优化车辆控制的功能 -> 用户在控制车辆状态时,实现控制按钮点击状态改变只触发一次onSwitchChange事件,不再下发控制指令,同时清除加载车辆实时状态的定时器status_interval直到有返回值再开启࿰…...