大学生机器人比赛实战(二)软件篇
大学生机器人比赛深度开发指南:核心技术详解与实战代码解析
作为参加过多次机器人竞赛的选手,我将详细剖析比赛中的核心技术实现,包括软件架构设计、实时系统应用、各大赛事代码特点以及性能优化技巧。本指南将帮助你从代码层面深入理解如何打造一个冠军级机器人系统。
一、机器人软件架构设计
1.1 分层架构设计
一个完整的比赛机器人通常采用分层架构设计:
应用层(比赛策略)↓
业务逻辑层(任务调度)↓
功能模块层(视觉/控制/通信)↓
硬件抽象层(HAL)↓
硬件层(传感器/执行器)
典型头文件组织:
// hal_uart.h - 硬件抽象层
void UART_Init(uint32_t baudrate);
void UART_Send(uint8_t *data, uint16_t len);// driver_motor.h - 功能模块层
void Motor_SetSpeed(uint8_t id, int16_t speed);// task_control.h - 业务逻辑层
void Control_Task(void *params);// strategy.h - 应用层
void Strategy_Update(GameState *game);
1.2 实时性保障方案
中断优先级配置(STM32为例):
void NVIC_Configuration(void)
{HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0); // 系统滴答最高优先级HAL_NVIC_SetPriority(EXTI0_IRQn, 1, 0); // 紧急传感器中断HAL_NVIC_SetPriority(TIM3_IRQn, 2, 0); // 电机控制定时器HAL_NVIC_SetPriority(USART1_IRQn, 3, 0); // 通信中断
}
二、RTOS在比赛中的应用
2.1 何时使用RTOS?
需要RTOS的场景:
- 多任务并行处理(如视觉+控制+通信)
- 复杂状态机管理
- 需要精确时序控制
- 系统资源需要动态管理
可以不用RTOS的情况:
- 简单循迹/搬运机器人
- 单任务循环就能满足需求
- 硬件资源极其有限
2.2 FreeRTOS实战配置
CubeMX配置示例:
- 选择TIM6作为时基源(1kHz)
- 启用FreeRTOS支持
- 设置堆大小(≥10KB)
- 创建关键任务:
- 控制任务(优先级3)
- 视觉任务(优先级2)
- 通信任务(优先级1)
任务创建代码:
void StartDefaultTask(void const *argument)
{// 创建控制任务osThreadDef(ControlTask, Control_Task, osPriorityHigh, 0, 512);osThreadCreate(osThread(ControlTask), NULL);// 创建视觉任务osThreadDef(VisionTask, Vision_Task, osPriorityNormal, 0, 1024);osThreadCreate(osThread(VisionTask), NULL);// 空闲任务中可以监控系统状态for(;;) {vTaskDelay(1000);printf("CPU Usage: %.1f%%\n", osGetCPUUsage());}
}
三、各大赛事代码特点详解
3.1 RoboMaster步兵机器人代码架构
典型控制流程:
// 云台控制任务
void Gimbal_Task(void *params)
{while(1) {// 1. 获取目标信息TargetInfo target = Vision_GetTarget();// 2. PID控制计算PID_Calc(&yaw_pid, target.yaw_angle);PID_Calc(&pitch_pid, target.pitch_angle);// 3. 电机输出Motor_SetAngle(YAW_MOTOR, yaw_pid.output);Motor_SetAngle(PITCH_MOTOR, pitch_pid.output);// 4. 射击决策if(target.valid && target.distance < 3.0f) {Shoot_Control(1); // 单发射击}osDelay(2); // 500Hz控制频率}
}
关键技术点:
- 双闭环PID控制(位置环+速度环)
- 弹道补偿算法
- 超级电容能量管理
- 装甲健康度监测
3.2 ROBOCON机械臂控制代码
运动学逆解实现:
// 机械臂逆运动学计算
ArmAngles IK_Calculate(Point3D target)
{ArmAngles angles;// 第一关节角度计算angles.base = atan2(target.y, target.x);// 第二三关节角度计算(几何法)float L = sqrt(target.x*target.x + target.y*target.y);float D = sqrt(L*L + (target.z - BASE_HEIGHT)*(target.z - BASE_HEIGHT));angles.shoulder = acos((UPPER_ARM*UPPER_ARM + D*D - LOWER_ARM*LOWER_ARM) / (2*UPPER_ARM*D)) + atan2(target.z - BASE_HEIGHT, L);angles.elbow = acos((UPPER_ARM*UPPER_ARM + LOWER_ARM*LOWER_ARM - D*D)/ (2*UPPER_ARM*LOWER_ARM));return angles;
}
运动规划算法:
// 梯形速度规划
void Trapezoidal_Plan(float current_pos, float target_pos, float max_speed, float max_acc)
{static float current_speed = 0;float distance = target_pos - current_pos;float stop_distance = current_speed*current_speed / (2*max_acc);if(fabs(distance) < stop_distance) {// 减速阶段current_speed -= max_acc * CONTROL_PERIOD;} else if(fabs(current_speed) < max_speed) {// 加速阶段current_speed += max_acc * CONTROL_PERIOD;}// 位置更新current_pos += current_speed * CONTROL_PERIOD;
}
3.3 电赛智能车控制代码
模糊PID控制实现:
// 模糊PID控制器
float Fuzzy_PID(float error, float error_rate)
{// 模糊化输入int e_level = Fuzzy_Map(error, -10, 10, 7); // 7个等级int ec_level = Fuzzy_Map(error_rate, -5, 5, 7);// 查模糊规则表const int rule[7][7] = {{1,1,1,2,2,3,3},{1,1,2,2,3,3,4},// ... 其他规则};int level = rule[e_level][ec_level];// 去模糊化float delta_kp = level * 0.1f; // 比例系数调整// 动态调整PID参数pid.Kp = BASE_KP + delta_kp;return PID_Calculate(&pid, error);
}
图像处理优化技巧:
// 快速巡线算法
void Find_TrackLine(uint8_t *image, int width, int height)
{int center = width / 2;int left_edge = 0;int right_edge = width - 1;// 从中间向左右搜索边界for(int i = 0; i < height; i++) {uint8_t *row = image + i * width;// 向左搜索for(int j = center; j > 0; j--) {if(row[j] - row[j-1] > THRESHOLD) {left_edge = j;break;}}// 向右搜索for(int j = center; j < width-1; j++) {if(row[j] - row[j+1] > THRESHOLD) {right_edge = j;break;}}center = (left_edge + right_edge) / 2;Draw_CenterLine(center);}
}
四、高级功能实现
4.1 视觉识别优化
OpenMV代码示例:
# 色块识别与追踪
import sensor, image, time# 初始化摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)# 定义目标颜色阈值
red_threshold = (30, 100, 15, 127, 15, 127)while(True):img = sensor.snapshot()# 寻找色块blobs = img.find_blobs([red_threshold], pixels_threshold=100, area_threshold=100, merge=True)if blobs:max_blob = max(blobs, key=lambda b: b.pixels())# 计算目标在图像中的位置img.draw_rectangle(max_blob.rect())img.draw_cross(max_blob.cx(), max_blob.cy())# 计算偏航角度(假设摄像头水平FOV=60度)yaw_angle = (max_blob.cx() - img.width()/2) * 60.0 / img.width()print("Yaw Angle: %.1f" % yaw_angle)
4.2 通信协议设计
自定义串口协议:
#pragma pack(1) // 单字节对齐
typedef struct {uint8_t head; // 0xAAuint8_t type; // 数据类型uint16_t len; // 数据长度uint8_t data[32];// 数据内容uint16_t crc; // CRC校验
} UART_Frame;// 帧解析函数
int UART_Parse(uint8_t *buf, int len)
{UART_Frame *frame = (UART_Frame *)buf;// 校验帧头if(frame->head != 0xAA) return -1;// 校验CRCif(CRC_Check(buf, sizeof(UART_Frame)-2, frame->crc) != 0) {return -2;}// 处理数据switch(frame->type) {case VISION_DATA:memcpy(&vision_data, frame->data, sizeof(vision_data));break;case GAME_STATE:game_state = *(GameState*)frame->data;break;}return 0;
}
4.3 运动控制优化
速度前馈控制:
void Motor_Control(float target_pos, float current_pos)
{static float last_pos = 0;float speed = (current_pos - last_pos) / CONTROL_PERIOD;last_pos = current_pos;// PID控制float error = target_pos - current_pos;float pid_out = PID_Calculate(&pid, error);// 速度前馈float feedforward = speed * FF_GAIN;// 输出叠加float output = pid_out + feedforward;PWM_SetDuty(output);
}
五、调试与优化技巧
5.1 实时调试方法
SWD调试配置:
- 在CubeMX中启用SWD接口(SWCLK+SWDIO)
- 在Keil/IAR中配置调试选项:
- 选择ST-Link调试器
- 设置复位模式为"硬件复位"
- 启用"运行到main()"
实时变量监控:
// 在Watch窗口添加这些变量
volatile float motor_speed; // 加volatile防止优化
volatile int32_t encoder_val;
volatile uint8_t system_state;
5.2 性能优化技巧
关键代码优化:
// 优化前
for(int i=0; i<100; i++) {value += array[i] * coefficients[i];
}// 优化后(使用指针+循环展开)
int *p = array;
int *c = coefficients;
int sum = 0;
for(int i=0; i<100; i+=4) {sum += p[0]*c[0] + p[1]*c[1] + p[2]*c[2] + p[3]*c[3];p += 4;c += 4;
}
内存优化策略:
- 使用内存池管理动态内存
- 关键数据结构对齐到32位
- 启用编译器优化(-O2/-O3)
- 使用DMA减少CPU开销
六、比赛经验总结
6.1 开发流程建议
-
需求分析阶段(1周):
- 详细分析比赛规则
- 确定技术指标(速度/精度等)
- 制定测试方案
-
原型开发阶段(2周):
- 搭建最小系统
- 验证核心算法
- 完成基本功能
-
系统集成阶段(1周):
- 模块联调
- 性能优化
- 编写技术报告
-
测试改进阶段(持续):
- 模拟比赛环境测试
- 收集数据改进算法
- 完善故障处理机制
6.2 常见问题解决方案
电机控制异常:
- 检查电源电压是否稳定
- 验证PWM信号是否正确
- 检查编码器接线
- 调整PID参数(先P后D最后I)
视觉识别不稳定:
- 优化光照条件
- 增加图像滤波
- 采用多帧验证机制
- 使用深度学习替代传统算法
通信丢包问题:
- 降低波特率测试
- 增加数据校验
- 优化天线位置
- 采用重传机制
通过本指南的系统学习,你将掌握机器人比赛开发的核心技术要点。记住,优秀的比赛作品=扎实的基础+创新的设计+充分的测试。建议从简单功能开始,逐步迭代完善,最终打造出具备竞争力的机器人系统!
相关文章:
软件篇)
大学生机器人比赛实战(二)软件篇
大学生机器人比赛深度开发指南:核心技术详解与实战代码解析 作为参加过多次机器人竞赛的选手,我将详细剖析比赛中的核心技术实现,包括软件架构设计、实时系统应用、各大赛事代码特点以及性能优化技巧。本指南将帮助你从代码层面深入理解如何…...

AI大模型从0到1记录学习 day13
第 13 章 Python高级语法 13.1 浅拷贝与深拷贝 直接赋值:对象的引用(别名),不产生拷贝。 浅拷贝:拷贝父对象,不会拷贝对象的内部的子对象。拷贝后只有第一层是独立的。 深拷贝:完全拷贝…...
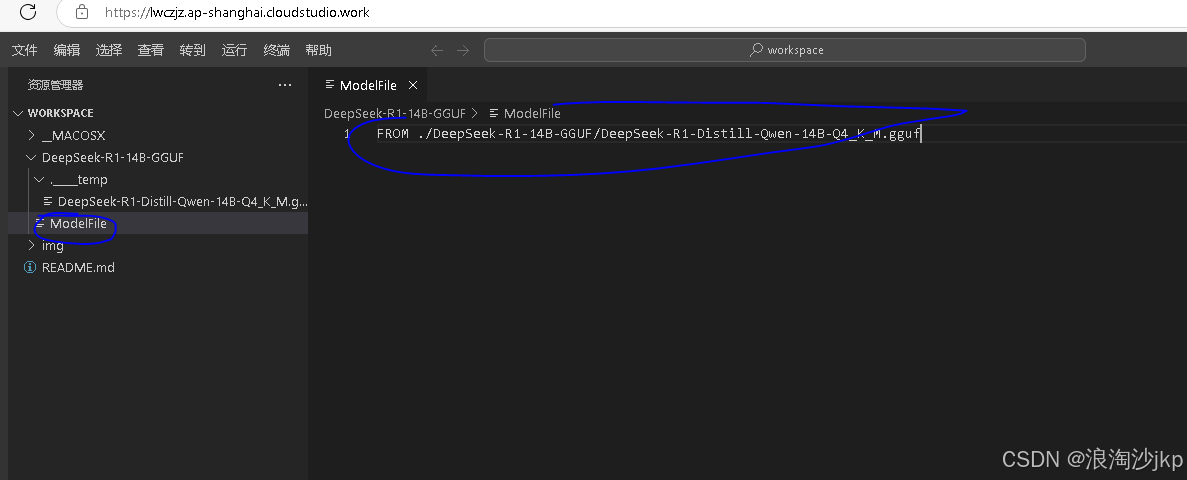
大模型学习三:DeepSeek R1蒸馏模型组ollama调用流程
一、说明 目前DeepSeek R1及其蒸馏模型均支持使用ollama进行调用,可以在模型主页查看调用情况 deepseek-r1https://ollama.com/library/deepseek-r1 显存需求 ,我们显存是16G,可以玩好几个 二、以14B模型演示 1、安装ollama curl -fsSL htt…...

RAGFlow部署与使用介绍-深度文档理解和检索增强生成
ragflow部署与使用教程-智能文档处理与知识管理的创新引擎 1. ragflow简介 RAGFlow作为新一代智能文档处理平台,深度融合检索增强生成(RAG)技术与自动化工作流引擎,为企业级知识管理提供全栈解决方案。通过结合多模态解析、语…...

一文读懂 UML:基础概念与体系框架
UML 图是一种标准化的建模语言,在软件开发和系统设计等领域有着广泛的应用。以下是对 UML 图各类图的详细介绍: 1.用例图 定义:用例图是从用户角度描述系统功能的模型图,展现了系统的参与者与用例之间的关系。作用:帮…...
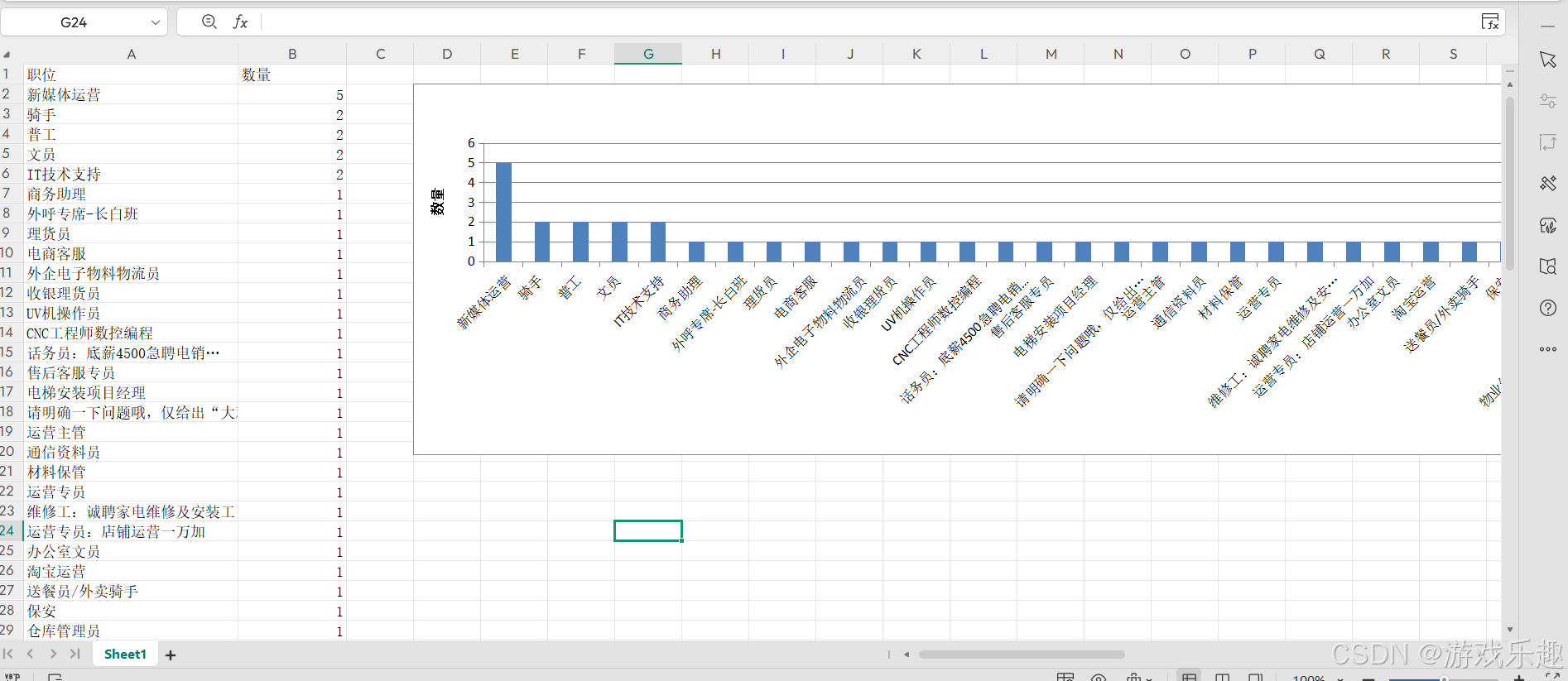
【AI赋能:58招聘数据的深度剖析之旅】
影刀出鞘,抓取数据 在当今数字化时代,数据分析已成为企业决策和发展的关键驱动力。而获取高质量的数据则是数据分析的首要任务。在这个信息爆炸的时代,网络上蕴含着海量的数据,其中招聘网站的数据对于人力资源分析、市场趋势研究…...
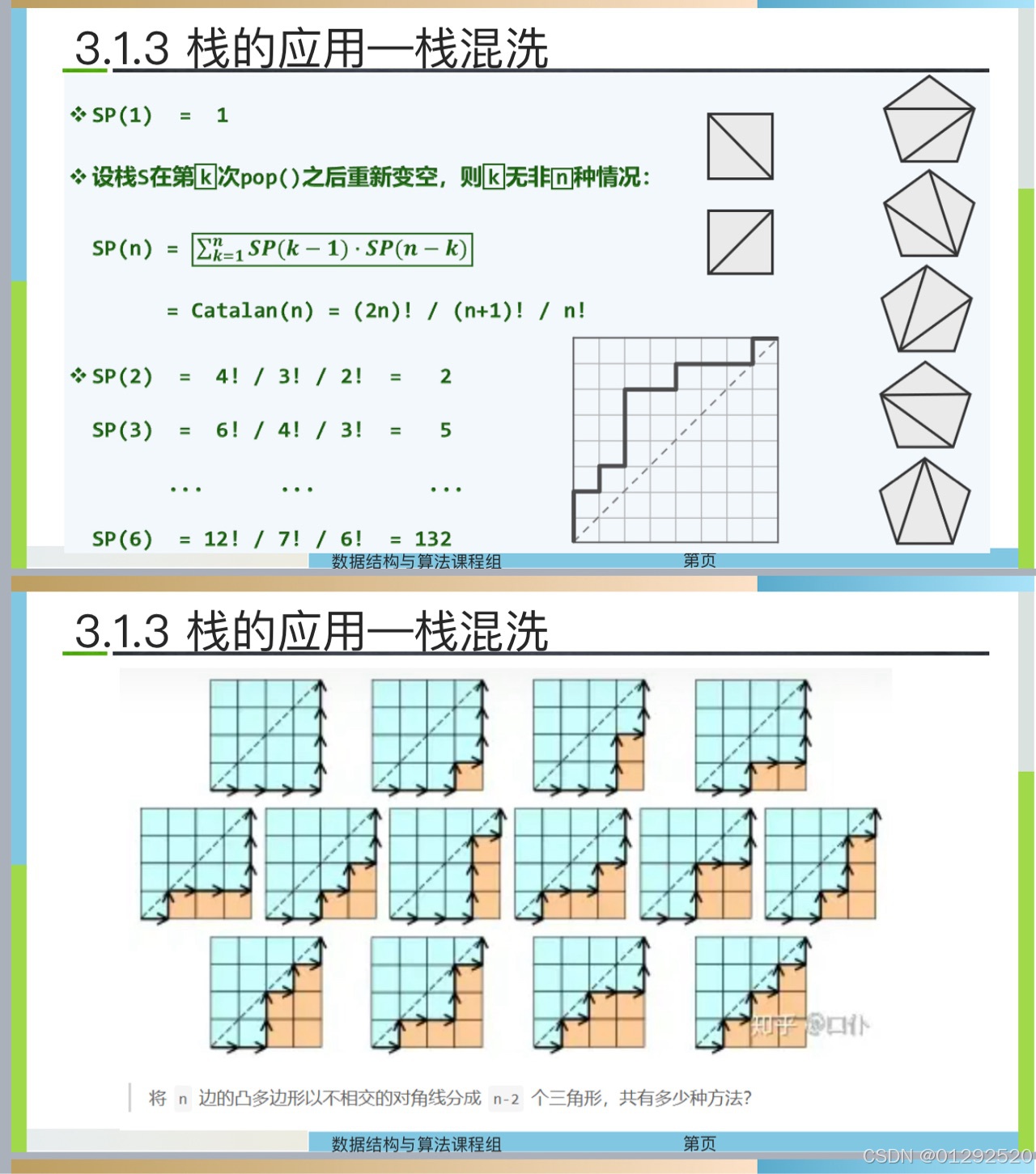
几何法证明卡特兰数_栈混洗
模型: 考虑从坐标原点 (0, 0) 到点 (n, n) 的路径,要求路径只能向右(x 方向)或向上(y 方向)移动,并且路径不能越过直线 y x(即始终满足 y< x )。这样的路径数量就是…...

Kafka的安装与使用(windows下python使用等)
一、下载 可以去官网下载:https://kafka.apache.org/downloads 版本可选择,建议下载比较新的,新版本里面自带zookeeper 二、安装 创建一个目录,此处是D:\kafka,将文件放进去解压 如果文件后缀是gz,解压…...

DataPermissionInterceptor源码解读
原文首发在我的博客:https://blog.liuzijian.com/post/mybatis-plus-source-data-permission-interceptor.html 目录 一、概述二、源码解读2.1 beforeQuery2.2 beforePrepare2.3 processSelect2.4 setWhere2.5 processUpdate2.6 processDelete2.7 getUpdateOrDelete…...

大模型中的参数规模与显卡匹配
在大模型训练和推理中,显卡(GPU/TPU)的选择与模型参数量紧密相关,需综合考虑显存、计算能力和成本。以下是不同规模模型与硬件的匹配关系及优化策略: 一、参数规模与显卡匹配参考表 模型参数量训练阶段推荐显卡推理阶…...

数据结构初阶: 顺序表的增删查改
顺序表 概念 顺序表是⽤⼀段物理地址连续的存储单元依次存储数据元素的线性结构,⼀般情况下采⽤数组存储。如图1: 顺序表和数组有什么区别? 顺序表的底层是用数组实现的,是对数组的封装,实现了增删查改等接口。 分…...

Spring Boot项目中策略模式的应用与实现
前言 在Spring Boot项目中,策略模式是一种非常重要的设计模式,它能够让我们定义一系列算法,并使它们可以互相替换。 策略模式通过将算法封装到独立的类中,从而使得代码中的算法可以独立于使用它的客户端变化。 这对于某些需求频…...

【机器学习中的基本术语:特征、样本、训练集、测试集、监督/无监督学习】
机器学习基本术语详解 1. 特征(Feature) 定义:数据的属性或变量,用于描述样本的某个方面。作用:模型通过学习特征与目标之间的关系进行预测。示例: 预测房价时,特征可以是 面积、地段、房龄。…...

MySQL全链路指南
目录 前言 第一章 MySQL基础入门 1.1 MySQL简介与安装 1.2 数据库基本操作 1.3 表结构与数据类型 第二章 SQL语言深度解析 2.1 DDL(数据定义语言) 2.2 DML(数据操作语言) 2.3 DQL(数据查询语言) 2…...
)
System.arraycopy()
在 Java 编程中,数组是一种常用的数据结构,用于存储相同类型的元素集合。在处理数组时,经常需要进行数组复制操作,例如将一个数组的部分或全部元素复制到另一个数组中。System.arraycopy() 方法是 Java 提供的一个高效的数组复制工…...

详解AI采集框架Crawl4AI,打造智能网络爬虫
大家好,Crawl4AI作为开源Python库,专门用来简化网页爬取和数据提取的工作。它不仅功能强大、灵活,而且全异步的设计让处理速度更快,稳定性更好。无论是构建AI项目还是提升语言模型的性能,Crawl4AI都能帮您简化工作流程…...
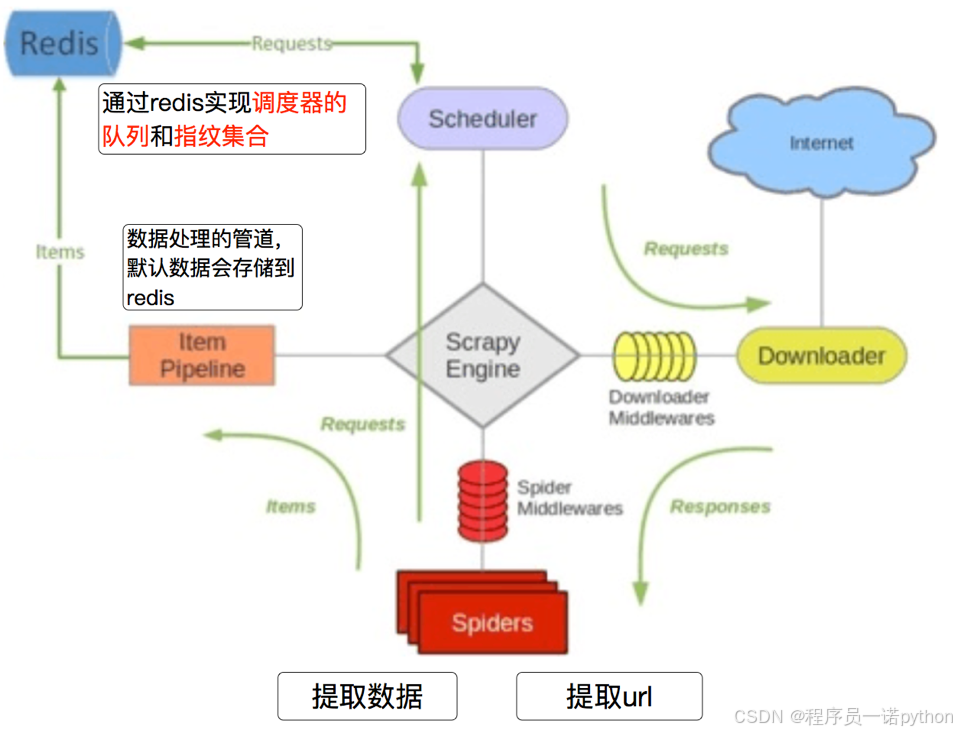
【爬虫开发】爬虫开发从0到1全知识教程第14篇:scrapy爬虫框架,介绍【附代码文档】
本教程的知识点为:爬虫概要 爬虫基础 爬虫概述 知识点: 1. 爬虫的概念 requests模块 requests模块 知识点: 1. requests模块介绍 1.1 requests模块的作用: 数据提取概要 数据提取概述 知识点 1. 响应内容的分类 知识点:…...

MySQL索引原理:从B+树手绘到EXPLAIN
最近在学后端,学到了这里做个记录 一、为什么索引像书的目录? 类比:500页的技术书籍 vs 10页的目录缺点:全表扫描就像逐页翻找内容优点:索引将查询速度从O(n)提升到O(log n) 二、B树手绘课堂 1. 结构解剖࿰…...
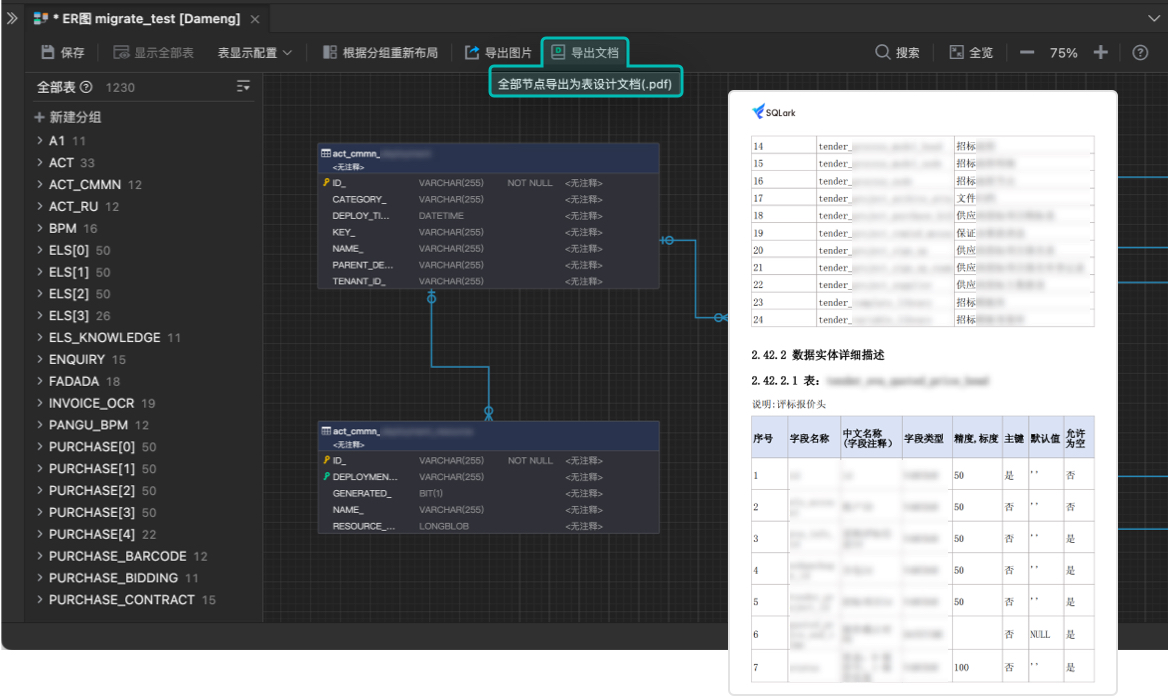
SQLark:一款国产免费数据库开发和管理工具
SQLark(百灵连接)是一款面向信创应用开发者的数据库开发和管理工具,用于快速查询、创建和管理不同类型的数据库系统,目前可以支持达梦数据库、Oracle 以及 MySQL。 对象管理 SQLark 支持丰富的数据库对象管理功能,包括…...

防爆对讲机VS非防爆对讲机,如何选择?
在通信设备的广阔市场中,对讲机以其高效、便捷的特点,成为众多行业不可或缺的沟通工具。而面对防爆对讲机与非防爆对讲机,许多用户常常陷入选择困境。究竟该如何抉择,且听我为您细细道来。 防爆对讲机,专为危险作业场…...

微信小程序开发:开发实践
微信小程序开发实践研究 摘要 随着移动互联网的迅猛发展,微信小程序作为一种轻量化、无需安装的应用形式,逐渐成为开发者和用户的首选。本文以“个人名片”小程序为例,详细阐述了微信小程序的开发流程,包括需求分析、项目规划、…...

操作 Office Excel 文档类库Excelize
Excelize 是 Go 语言编写的一个用来操作 Office Excel 文档类库,基于 ECMA-376 OOXML 技术标准。可以使用它来读取、写入 XLSX 文件,相比较其他的开源类库,Excelize 支持操作带有数据透视表、切片器、图表与图片的 Excel 并支持向 Excel 中插…...

青铜与信隼的史诗——TCP与UDP的千年博弈
点击下面图片带您领略全新的嵌入式学习路线 🔥爆款热榜 88万阅读 1.6万收藏 第一章 契约之匣与自由之羽 熔岩尚未冷却的铸造台上,初代信使长欧诺弥亚将液态秘银倒入双生模具。左侧模具刻着交握的青铜手掌,右侧则是展开的隼翼纹章。当星辰…...
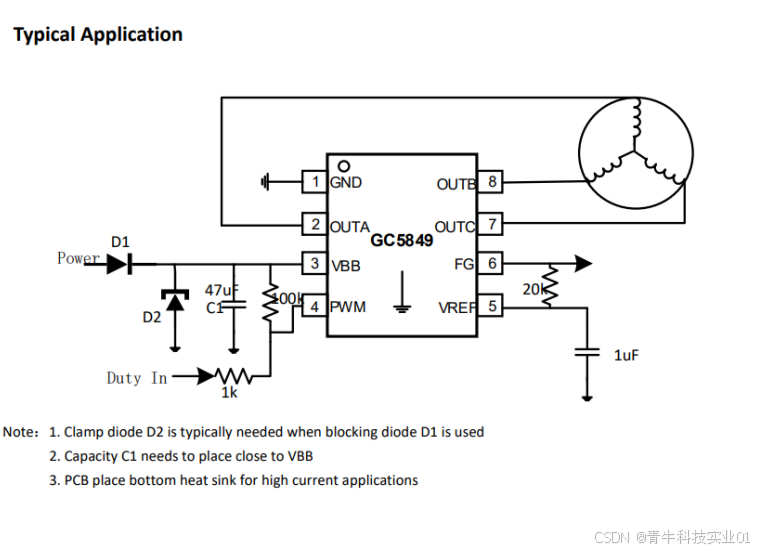
「青牛科技」GC5849 12V三相无感正弦波电机驱动芯片
芯片描述: • 4 ~ 20V 工作电压, 30V 最大耐压 • 驱动峰值电流 2.0A ,连续电流 800mA 以内 • 芯片内阻: 900mΩ (上桥 下桥) • eSOP-8 封装,底部 ePAD 散热,引…...

Java基础之反射的基本使用
简介 在运行状态中,对于任意一个类,都能够知道这个类的所有属性和方法;对于任意一个对象,都能够调用它的任意属性和方法;这种动态获取信息以及动态调用对象方法的功能称为Java语言的反射机制。反射让Java成为了一门动…...
大语言模型中的嵌入模型
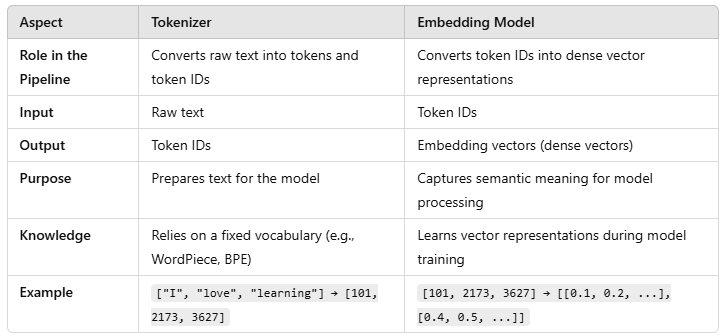
本教程将拆解什么是嵌入模型、为什么它们在NLP中如此重要,并提供一个简单的Python实战示例。 分词器将原始文本转换为token和ID,而嵌入模型则将这些ID映射为密集向量表示。二者合力为LLMs的语义理解提供动力。图片来源:[https://tzamtzis.gr/2024/coding/tokenization-by-an…...

【从零实现Json-Rpc框架】- 项目实现 - 服务端主题实现及整体封装
📢博客主页:https://blog.csdn.net/2301_779549673 📢博客仓库:https://gitee.com/JohnKingW/linux_test/tree/master/lesson 📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正! &…...
的作用)
位置编码(Positional Encoding, PE)的作用
在神经网络(尤其是Transformer、RNN等序列模型)中,位置编码(Positional Encoding, PE)的作用是为模型提供序列中元素的位置信息,以弥补模型本身对顺序感知的不足。 为什么Transformer需要位置编码…...
开源的 LLM 应用开发平台Dify的安装和使用
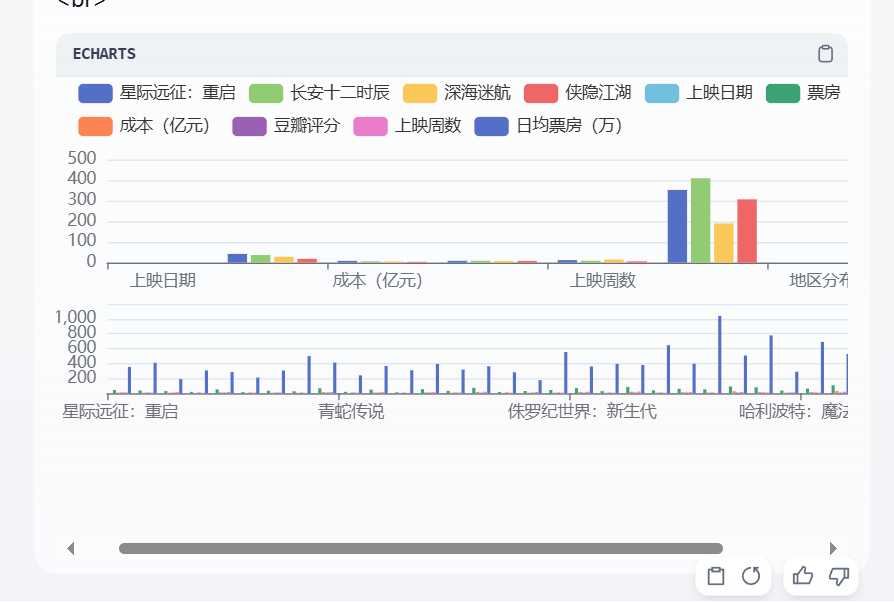
文章目录 前提环境应用安装deocker desktop镜像源配置Dify简介Dify本地docker安装Dify安装ollama插件Dify安装硅基流动插件简单应用练习进阶应用练习数据库图像检索与展示助手echart助手可视化 前提环境 Windows环境 docker desktop魔法环境:访问Dify项目ollama电脑…...
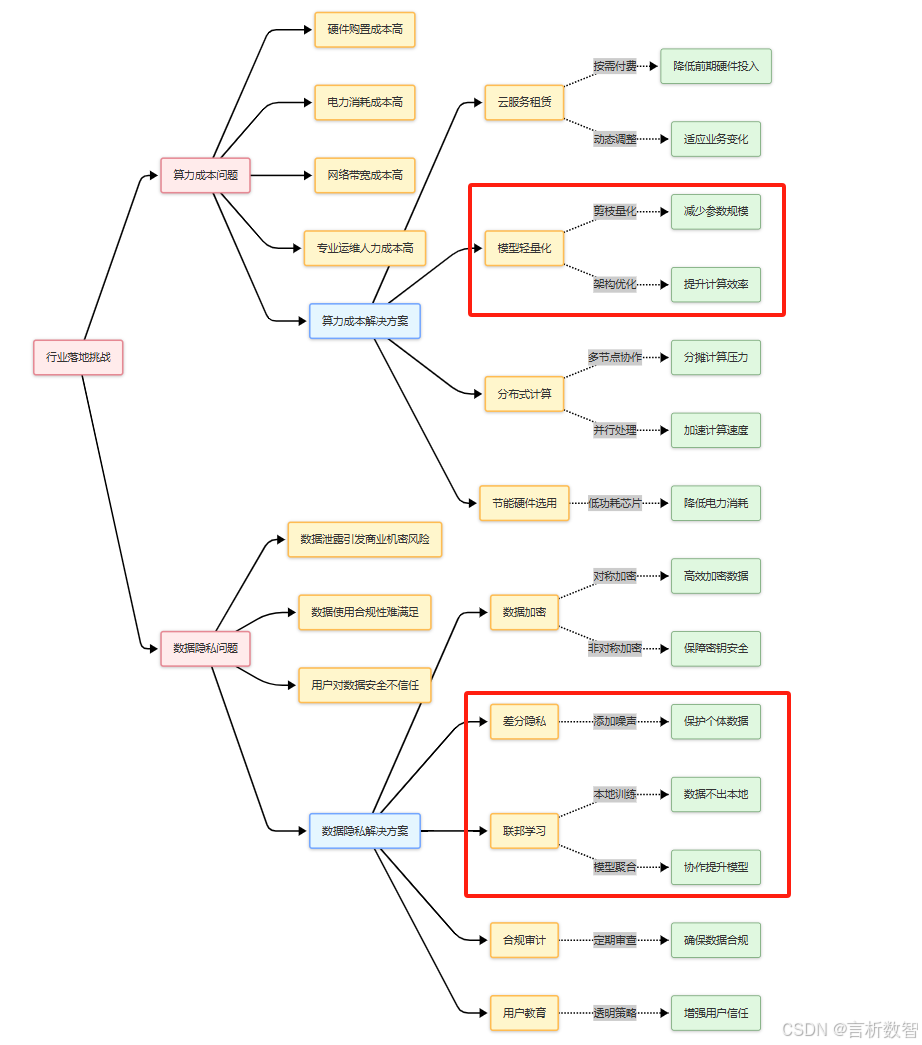
从零构建大语言模型全栈开发指南:第五部分:行业应用与前沿探索-5.1.2行业落地挑战:算力成本与数据隐私解决方案
👉 点击关注不迷路 👉 点击关注不迷路 👉 点击关注不迷路 文章大纲 从零构建大语言模型全栈开发指南-第五部分:行业应用与前沿探索5.1.2 行业落地挑战:算力成本与数据隐私解决方案1. 算力成本挑战与优化策略1.1 算力成本的核心问题1.2 算力优化技术方案2. 数据隐私挑战…...